机电传动控制(完整版)
- 格式:doc
- 大小:1.14 MB
- 文档页数:214


第十一章步进电动机传动控制系统11.1 步进电动机步进电动机是一种将电脉冲信号转换成机械位移的机电执行元件。
每当一个脉冲信号施加于电机的控制绕组时,其转轴就转过一个固定的角度(步距角),顺序连续地发给脉冲,则电机轴一步接一步地运转。
图11.1 步进电动机实物图步进电动机的角位移与输入脉冲数严格成正比,运行中无累积误差。
步进电机能方便地实现正、反转和调速、定位控制。
特别是不需位置传感器或速度传感器就可以在开环控制下精确定位或同步运行。
因此,步进电动机广泛应用在数字控制的各个领域。
如各种数控机械、办公自动化产品、工厂自动化机器、计算机外设等。
步进电动机的缺点是不能达到很高的转速(一般小于1000到2000转/min)。
存在低频振荡、高频失步等缺陷。
另外,步进电机自身的噪声和振动较大。
一、步进电动机的工作原理步进电动机的种类很多,按工作原理分,有反应式(Variable-reluctance)、永磁式(Permanent-magnet)、混合式(Hybrid)三种。
按输出转矩大小分,有快速步进电机、功率步进电机。
按励磁相数分有二、三、四、五、六、八相等。
按定子排列还可分为多段式(轴向式)和单段式(径向式)。
步进电动机的结构形式虽然繁多,但工作原理基本相同,下面仅以三相反应式步进电动机为例说明之。
如图11.2所示为一台三相反应式步进电动机的结构示意图。
和一般旋转电动机一样,步进电机也分为定子和转子两大部分。
定子部分由定子铁心、绕组、绝缘材料等组成。
定子铁心是由硅钢片叠压而成的有齿的圆环状铁心。
图中定子有6个磁极,每对磁极上绕有励磁绕组,由外部脉冲信号对各相绕组轮流励磁。
如图所示。
转子部分由转子铁心、转轴等组成。
转子铁心是由硅钢片或软磁材料叠压而成的齿形铁心。
图中转子上有4个凸齿。
若对励磁绕组以一定方式通以直流励磁电流,则转子以相应的方式转动。
其转动原理其实就是电磁铁的工作原理 。
比如,给A 相绕组通电时,转子位置如图(a ),转子齿偏离定子齿一个角度。
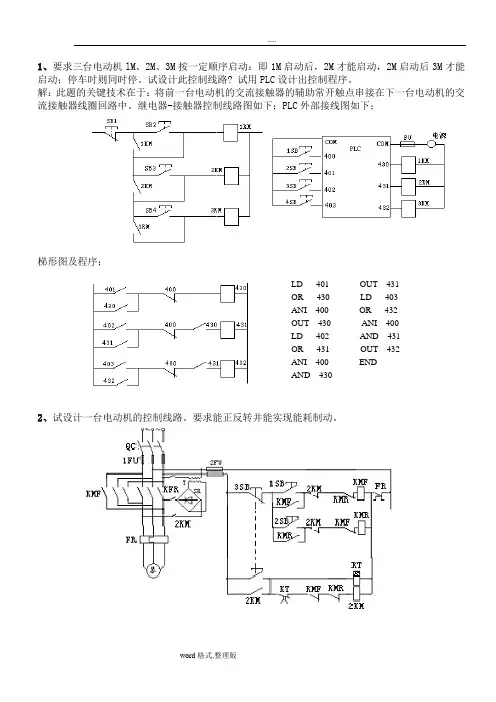
1、要求三台电动机lM、2M、3M按一定顺序启动:即1M启动后,2M才能启动,2M启动后3M才能启动;停车时则同时停。
试设计此控制线路? 试用PLC设计出控制程序。
解:此题的关键技术在于:将前一台电动机的交流接触器的辅助常开触点串接在下一台电动机的交流接触器线圈回路中。
继电器-接触器控制线路图如下;PLC外部接线图如下;梯形图及程序;LD 401 OUT 431OR 430 LD 403ANI 400 OR 432OUT 430 ANI 400LD 402 AND 431OR 431 OUT 432ANI 400 ENDAND 4302、试设计一台电动机的控制线路。
要求能正反转并能实现能耗制动。
3、设计一台异步电动机的控制线路。
要求:①能实现启、停的两地控制;③)能实现点动调整;②能实现单方向的行程保护;④要有短路和长期过载保护;4、试设计一条自动运输线,有两台电动机,1M拖动运输机,2M拖动卸料机。
要求:①1M先启动后,才允许2M启动;②2M先停止,经一段时间后1M才自动停止,且2M可以单独停止;③两台电动机均有短路、长期过载保护。
试用PLC设计出控制程序。
LD 400 ANI 403OR 430 ANI 450ANI 450 OUT 431OUT 430 LD 402LD 430 OR 450OUT 200 OUT 450MC 200 MCR 200LD 401 ENDOR 4311SB、2SB分别是1M、2M的启动按纽,4SB是2M的单独停止按纽,3SB是停止按纽。
5、下图为机床自动间歇润滑的控制线路图,其中接触器KM为润滑油泵电动机启停用接触器(主电路未画出),控制线路可使润滑有规律地间歇工作。
试分析此线路的工作原理,并说明开关S和按钮SB的作用? 试用PLC设计出控制程序。
答:这是一个自动间歇润滑的控制线路。
开关S、按钮1SB的作用及电路的工作过程如下:(1)S是进行自动间歇润滑的控制开关,1KT-决定润滑时间,2KT-决定不润滑时间,电路的工作过程:合上开关S,KM的线圈得电,电动机M转动,进行润滑;1KT的线圈得电,触点1KT延时后闭合,K的线圈得电,常开触点K闭合,自锁;常闭触点K断开,KM线圈失电,停止润滑;1KT的线圈失电。
机电传动控制冯清秀邓星钟第五版习题及答案第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0 说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TMTLTLNTM=TL TM< TLTM-TL>0 说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TLTM>TL系统的运动状态是减速系统的运动状态是加速TMTM= TLTM=TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω,p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5 为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T 越大,ω越大T 越小。
2.6 为什么机电传动系统中低速轴的GD2 逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P 不变转速越小GD2 越大,转速越大GD2 越小。
机电传动控制教案学院、系:机械电子工程学院机电系任课教师:任有志授课专业:机械设计制造及其自动化课程学分:课程总学时:60学时课程周学时:2006年2月20日机电传动控制教学进程第 1 次课 2 学时第一章概述§1.1机电传动的目的和任务1.传动——运动的传递(能量)传动的分类(按机械动能传递方法)(1)机械传动 a.齿轮b.杠杆如:自行车驱动力、链传动c.皮带d.机构等刹车、连杆机构传递力或力矩(机械能)(2〕流体传动 a.液压与气动(压力能)b.液力传动(流体动能)(3)机电传动(电力拖动)(4)另外还有其它的传动方式。
注:有时,在一个生产机械中由几种传动形式联合工作。
2.机电传动-(本课程研究的内容)以电动机为原动机驱动生产机械的传动系统服务对象:各种生产机械它是一种由电能转变成机械能的传动系统,所以有时也称为电力传动或电力拖动3. 机电传动控制目前:由于生产技术的不断发展,生产机械的自动化程度和生产精度不断提高,所以要求机电传动系统不仅完成能量转换的工作还要对传动过程进行控制。
本课程所研究的就是这二部分内容。
传动及控制所以课程名称叫《机电传动控制》4. 机电传动控制的任务举例:天车的吊起、制动机床切削过程电梯平稳升降及定位轧机的换向等§1.2机电传动发展概况简单的可以分为:a.成组拖动(传动)b.单电机拖动c.多电机拖动三个阶段从控制系统的功率器件上分类:a.接触器和继电器时代b.电机放大机及磁放大机时代c.可控硅(晶闸管)另外,由于计算机技术的发展,又出现了a.模拟控制b.数字控制(数控机床)§1.3 内容安排1.《机械电子》专业是一个以机为主机电结合的专业,课程设置(具了解)基本上是这样的《电路基础》电学基础《模拟电子》电子技术(弱电)《数字电子》计算机技术《机电传动控制》包括了所有应掌握的强电内容用以上四门课程取代了机械专业的《电工学》课程。
2.本门课包括以下几个方面:(1)电机原理及特性: 交、直、特殊、三~七章(2)电器及控制:接触器,继电器;保护及控制器八章(3)可编程序控制器:(PC)原理及应用九章(4)可控硅原理及应用: 晶闸管十章(5)调速系统: 交流、直流,电力拖动十一、十二章(6)步进电机调速系统: 自动化十三章3.课程特点综合性比较强(面宽)实践性比较强与生产实践联系较强(教学实验)4.教学实验计划开五个:5.学时安排:由于作者建议用90学时讲授,实际他用大约70学时我们目前安排了60个学时。
【最新整理,下载后即可编辑】机电传动控制教案学院、系:机械电子工程学院机电系任课教师:任有志授课专业:机械设计制造及其自动化课程学分:课程总学时:60学时课程周学时:2006年2月20日机电传动控制教学进程河北科技大学教案用纸第 1 次课 2 学时第一章概述§1.1机电传动的目的和任务1.传动——运动的传递(能量)传动的分类(按机械动能传递方法)(1)机械传动a.齿轮b.杠杆如:自行车驱动力、链传动c.皮带d.机构等刹车、连杆机构传递力或力矩(机械能)(2〕流体传动 a.液压与气动(压力能)b.液力传动(流体动能)(3)机电传动(电力拖动)(4)另外还有其它的传动方式。
注:有时,在一个生产机械中由几种传动形式联合工作。
2.机电传动-(本课程研究的内容)以电动机为原动机驱动生产机械的传动系统服务对象:各种生产机械它是一种由电能转变成机械能的传动系统,所以有时也称为电力传动或电力拖动3. 机电传动控制目前:由于生产技术的不断发展,生产机械的自动化程度和生产精度不断提高,所以要求机电传动系统不仅完成能量转换的工作还要对传动过程进行控制。
本课程所研究的就是这二部分内容。
传动及控制所以课程名称叫《机电传动控制》4. 机电传动控制的任务机床切削过程电梯平稳升降及定位轧机的换向等§1.2机电传动发展概况简单的可以分为:a.成组拖动(传动)b.单电机拖动c.多电机拖动三个阶段从控制系统的功率器件上分类:a.接触器和继电器时代b.电机放大机及磁放大机时代c.可控硅(晶闸管)另外,由于计算机技术的发展,又出现了a.模拟控制b.数字控制(数控机床)§1.3 内容安排1.《机械电子》专业是一个以机为主机电结合的专业,课程设置(具了解)基本上是这样的《电路基础》电学基础《模拟电子》电子技术(弱电)《数字电子》计算机技术《机电传动控制》包括了所有应掌握的强电内容用以上四门课程取代了机械专业的《电工学》课程。
机电传动控制(完整版)机电传动控制教案学院、系:机械电子工程学院机电系任课教师:***授课专业:机械设计制造及其自动化课程学分:课程总学时:60学时课程周学时:2006年2月20日机电传动控制教学进程周次课次章节计划学时教学手段教学环境22 3 3 4 45 56 67 7 88 9 9 1010111112 1213131414151516 16 121212121212121212121212121212§1.1§1.2§1.3§2.1§2.3§2.4§3.1§3.2 §3.3§3.4§3.5§3.6§5.1§5.2§5.3§5.4§5.4§5.5§5.7§5.8§6.1§6.2§6.3 §6.4§6.5§6.7§7.1§7.2 §7.3§7.4§7.5 §7.6电动机原理习题讨论课§8.1§8.1§8.2实验课继电器接触器控制实验习题讨论课:§8.3 §8.4§9.1§9.2实验课:可编程序控制器认识实验§9.3 §9.3实验课:可编程序控制器编程练习§10.1 §10.2§10.3§10.5 §10.6实验课:晶闸管特性及触发原理§11.1 §11.2§11.3 §11.4§12.1§13.1 §13.2§13.3§13.4实验课题讨论课222222222222222222222222222222讲授讲授讲授讲授讲授讲授讲授讲授辅导讲授讲授讲授指导辅导讲授讲授指导讲授指导讲授讲授指导讲授讲授讲授讲授讲授讲授指导辅导多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室机电实验室多媒体教室多媒体教室多媒体教室机电实验室多媒体教室机电实验室多媒体教室多媒体教室机电实验室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室多媒体教室机电实验室多媒体教室第 1 次课 2 学时第一章概述§1.1机电传动的目的和任务1.传动——运动的传递(能量)传动的分类(按机械动能传递方法)(1)机械传动a.齿轮b.杠杆如:自行车驱动力、链传动c.皮带d.机构等刹车、连杆机构传递力或力矩(机械能)(2〕流体传动 a.液压与气动(压力能)b.液力传动(流体动能)(3)机电传动(电力拖动)(4)另外还有其它的传动方式。
注:有时,在一个生产机械中由几种传动形式联合工作。
2.机电传动-(本课程研究的内容)以电动机为原动机驱动生产机械的传动系统服务对象:各种生产机械它是一种由电能转变成机械能的传动系统,所以有时也称为电力传动或电力拖动3. 机电传动控制目前:由于生产技术的不断发展,生产机械的自动化程度和生产精度不断提高,所以要求机电传动系统不仅完成能量转换的工作还要对传动过程进行控制。
本课程所研究的就是这二部分内容。
传动及控制所以课程名称叫《机电传动控制》4. 机电传动控制的任务举例:天车的吊起、制动机床切削过程电梯平稳升降及定位轧机的换向等§1.2机电传动发展概况简单的可以分为: a.成组拖动(传动)b.单电机拖动c.多电机拖动三个阶段从控制系统的功率器件上分类:a.接触器和继电器时代b.电机放大机及磁放大机时代c.可控硅(晶闸管)另外,由于计算机技术的发展,又出现了a.模拟控制b.数字控制(数控机床)§1.3 内容安排1.《机械电子》专业是一个以机为主机电结合的专业,课程设置(具了解)基本上是这样的《电路基础》电学基础《模拟电子》电子技术(弱电)《数字电子》计算机技术《机电传动控制》包括了所有应掌握的强电内容用以上四门课程取代了机械专业的《电工学》课程。
2.本门课包括以下几个方面:(1)电机原理及特性: 交、直、特殊、三~七章(2)电器及控制:接触器,继电器;保护及控制器八章(3)可编程序控制器:(PC)原理及应用九章(4)可控硅原理及应用: 晶闸管十章(5)调速系统: 交流、直流,电力拖动 十一、十二章(6)步进电机调速系统:自动化 十三章3.课程特点 综合性比较强(面宽)实践性比较强 与生产实践联系较强(教学实验)4.教学实验 计划开五个:5.学时安排:由于作者建议用90学时讲授,实际他用大约70学时我们目前安排了60个学时。
教学实验 建议开八个 实际开出了五个 我们目前条件可开六个 但学时数的关系开五个第二章 机电传动的动力学基础§2.1运动方程式1.对于一个电动机输出轴上的运动情况有T T Jd dt k dndtML- = = ωT m电机的输出扭矩T L电机的负载扭矩ω 为角速度 J 转动惯量 n 为转速 k 为常数2.意义:T m与T L之差将产生加速度当T m>T L时,加速当T m<T L时,减速当T m=T L时,匀速(平衡)3.T m与T L的正反。
以转速的方向为准(n )T m: 与n 同向时为正(拖动)反之为负(制动)T L: 与n 反向时为正(制动)反之为负(拖动)解释:提升重物 升:T m为正,T L正降:T L为负,T m负(制动)第5页2个图MnT m T L升MnT m T L降§2.3生产机械的机械特性机械特性:生产机械转轴(电机轴)上的负载转矩和转速之间的函数关系。
分为以下几种§2.3.1 恒转矩机械特性特点:负载转矩为常数,T L=C 可分为:反抗(摩擦)与n同号(总制动)位能方向一定反抗转矩位能转矩离心风机特性例切削力吊重物§2.3.2 离心风机特性特点:Tc=cn 2与转速平方成正比§2.3.3 直线型特性特点:TL =cn§2.3.4 恒功率型特性特点:TL =c/n直线型 恒功率型§2.4 机电传动系统的稳定运行条件电动机的机械特性是Tm=f(n) 曲线及驱动扭矩和转速的函数关系生产机械的机械特性是T L=f(n)曲线及负载扭矩和转速的函数关系当电动机作为生产机械的原动机(动力源)时,两个函数中的n 为同一个参数。
T LnT Ln在运行中由运动方程式可知,要想稳定运行,速度应匀速不变及TL =Tm 时及是稳定的一个条件,所以系统稳定运行的条件之一是1、电动机和生产机械的机械特性曲线应有交点 此处:Tm=T L(匀速)例: 曲线1和2,附合这个条件,有a 、b 交点 曲线1和3,不附合另外,应有抗干扰能力: 当有外来干扰时会引起n 变化 当干扰消失后,n 应恢复原状态 所以另一个稳定条件是:2、当有外加干扰使n 变化时,干扰消除后n 应能自行恢复到原状态。
这件条件的判断原则是: 当n ↑Tm<TL 当n ↓Tm>TLab123由运动方程看T T Jd dtM L -==ω0当干扰使n ↑时,干扰消除后希望n ↓这时如Tm-TL<0则负加速当干扰使n ↓时,干扰消除后希望n ↑这时如Tm-TL>0则正加速例:a,b 两点a 点,当n ↑时 Tm ↓—Tm'当干扰消除后由于在n'处Tm-TL<0,所以n ↓ b 点,当n ↑时 Tm ↑—Tm''当干扰消除后由于在n''处Tm-TL>0,所以n ↑到n'''直到a 点处平衡abn n'T L T m 'T m ''n''第 2 次课 2 学时第三章直流电机的工作原理电机的分类: a发电机,电动机b直流,交流、步进特点:直流电动机:可以实现无级调速(优点),在传统的模拟控制系统中应用多交流电动机:简单、便宜、但调速复杂步进电动机:用脉冲工作、易于数字控制直流发电机:一般用来为直流电动机配套;但可控硅取代很多的发电机§3.1直流电机的基本结构和原理§3.1.1直流电机的结构主要部件:励硅绕组(定子线圈)用来产生磁场电枢绕组(转子线圈)通有工作电流换向器保持电枢绕组的电流方向不变铁芯(定子、转子)导磁及支撑作用:简述其它:略§3.1.2 直流电机的基本工作原理以单个电枢绕组线圈为例说明一、发电机(根据右手定则)励磁绕组通电产生一磁场>A点总与N极侧的一边相连>B点总与N极侧的一边相连>转子(电枢线圈)由原动机拖动,以转速n转动>这时,N边切割磁力线产生电势指向外S边切割磁力线产生电势指向内> AB两点就产生了电势E=KeΦn当有负载R L时,就产生电流I>这时, E=KeΦn二、电动机(根据左手定则)> 在AB两点加电压,在电枢中产生电流I> 则N边受力, S边反向受力,形成转矩T =KmΦIa> 电枢转动后,切割磁力线产生反电势E=KeΦn> 当n到一定值后,Ia=(U-E)/Ra满足T后稳定下来。
注:在发电机中E=KeΦn是输出电势当Ia 0时,T=KmΦIa(负载转矩)为原动机负载,既Ia为负载在电动机中Tm=KmΦIa 为输出动力Em=KeΦn 为反电势当Tm 大n↑[T M-T L=J(dω/dt)] E M↑(U-E M)↓Ia=(U-E M)/Ra↓T M↓T M 是负载§3.2 直流发电机对于直流电机按其励磁方法分为以下几种情况: 他励:磁绕组有独立的电源与电枢无关并励:励磁绕组与电枢并联串励:励磁绕组与电枢串联复励:有串也有并励§3.2.1他励发电机1.电原理图由于独立U f, I f所以负载电流I=电枢电流Ia2. 空载特性当发电机空载(Ia=0)及转速(n)不变时,输出电势与励磁电流的关系曲线当If小时直线(不饱和)If大时,弯曲(开始饱和)If更大,平直(饱和,Φ不变)3. 外特性曲线当发电机转速(n)和励磁(Φ)不变时,输出电压(U)与负载电流(I)之间的关系曲线注:当Ia↑RaIa↑U=E-IaRa↓§3.2.2并励发电机1.电原理图:由于I f<<I所以Ia≈I2.电压建立过程由于事先没有励磁电压U所以I f=0当电枢转动时,没有磁场所以不会产生E。