机电传动控制(第五版)课后习题答案解析全集 PPT
- 格式:ppt
- 大小:3.00 MB
- 文档页数:148
机电传动控制(第五版)课后习题答案习题与思考题第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
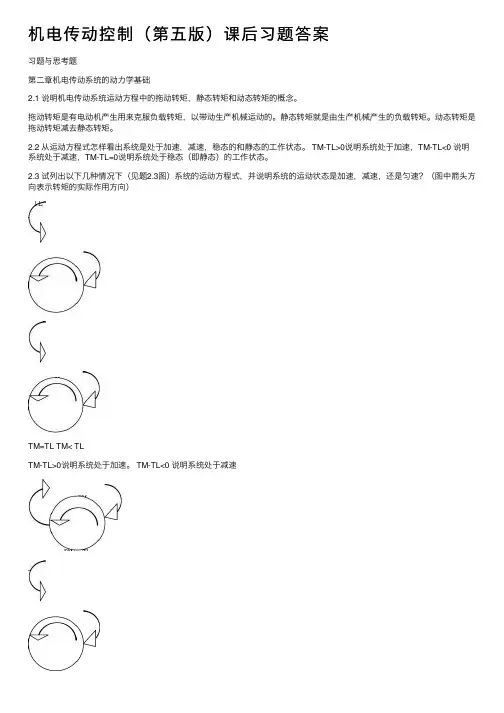
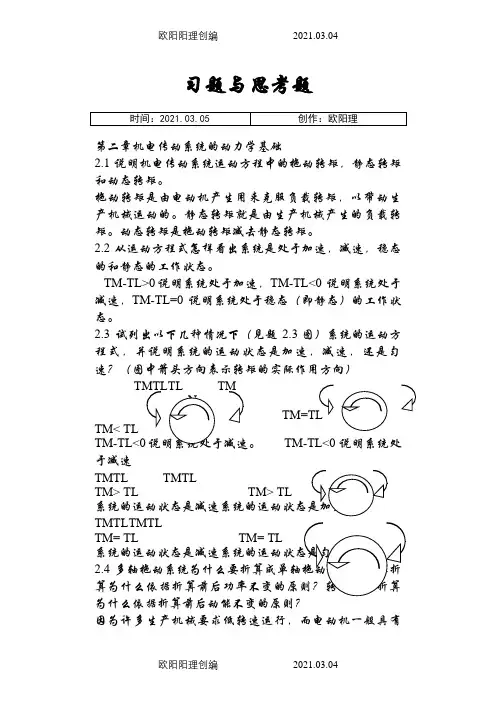
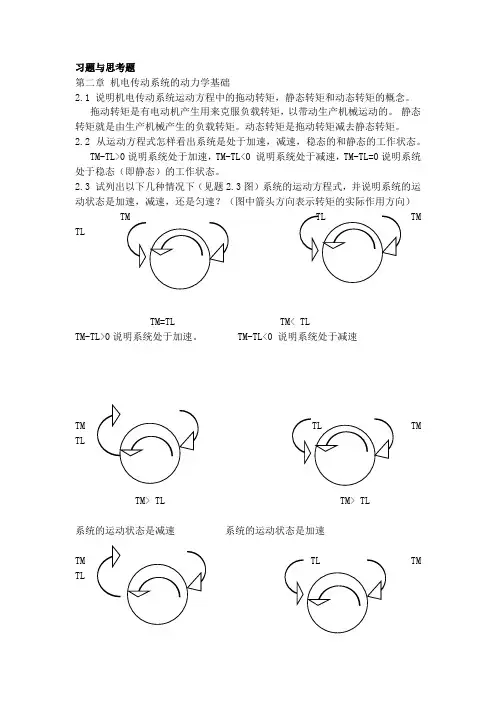
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)TM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= Tω,P不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的GD2逼⾼速轴的GD2⼤得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越⼩GD2越⼤,转速越⼤GD2越⼩。
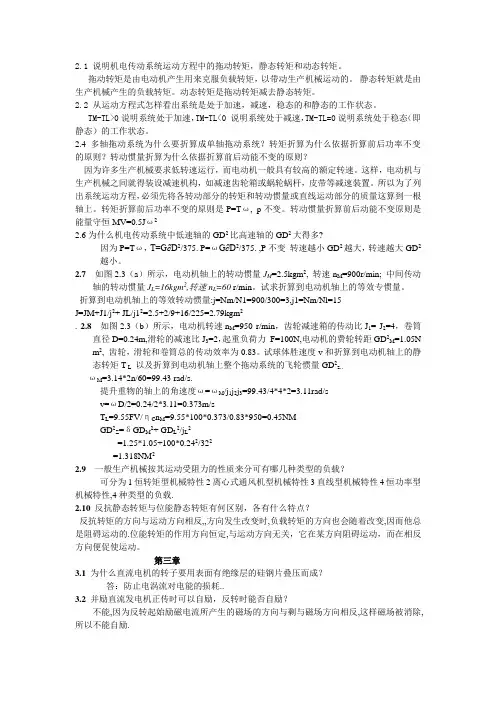
2.7 如图2.3(a)所⽰,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min;中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。

习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM< TLTM-TL<0 TM-TL<0 说明系统处于减速TMTL TMTLTM> TL TM> TLTMTLTMTLTM= TL TM= TL2.4为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω2 2.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图 2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60r/min。
试求折算到电动机轴上的等效专惯量。
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min;中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的G D2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2. 2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
机电传动控制清秀 邓星钟 等编著第五版 课后习题答案详解2.1 说明机电传动系统运动方程式中的拖动转矩、静态转矩和动态转矩的概念。
答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
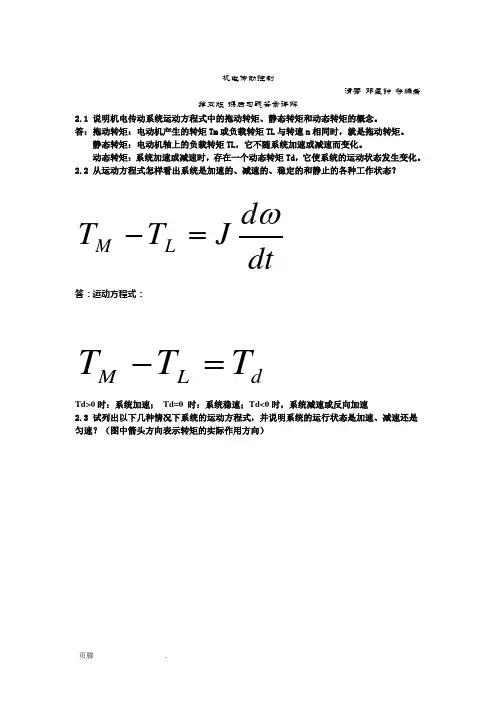
2.2 从运动方程式怎样看出系统是加速的、减速的、稳定的和静止的各种工作状态?dtd JT T L M ω=-答:运动方程式:dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速2.3 试列出以下几种情况下系统的运动方程式,并说明系统的运行状态是加速、减速还是匀速?(图中箭头方向表示转矩的实际作用方向)答:a匀速,b减速,c减速,d加速,e减速,f匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5 为什么低速轴转矩大?调速轴转矩小?答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2 而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T22.6 为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7 如图所示,电动机轴上的转动惯量JM=2.5kg.m2,转速nM=900r/mim;中间传动轴的转动惯量J1=2kg.m2,转速n1=300r/mim;生产机械轴的惯量JL=16kg.m2,转速nL=60r/mim。
拖动转矩:电动机产生的转矩Tm或负载转矩TL与转速n相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td,它使系统的运动状态发生变化。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5 为什么低速轴转矩大?调速轴转矩小?答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2 而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时,T1<T22.6 为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.10 反抗静态转矩与位能静态转矩有何区别,各有什么特点?答:反抗性恒转矩负载恒与运动方向相反。
位能性恒转矩负载作用方向恒定,与运动方向无关。
3.1 为什么直流电机的转子要用表面有绝缘层的硅钢片叠压而成?答:转子在主磁通中旋转,要产生涡流和磁滞损耗,采用硅钢软磁材料,可减少磁滞损耗,而采用“片”叠压成,可减少涡流损耗。
3.11为什么直流电动机直接启动时启动电流很大?答:因为Tst=UN/Ra,Ra很小,所以Tst很大,会产生控制火花,电动应力,机械动态转矩冲击,使电网保护装置动作,切断电源造成事故,或电网电压下降等。
故不能直接启动。
3.12 他励直流电动机启动过程中有哪些要求?如何实现?答:要求电流Ist≤(1.5~2)IN,可采用降压启动、电枢回路串电阻进行启动。
机电传动控制(第五版)课后习题答案习题与思考题第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
>0说明系统处于加速,<0 说明系统处于减速,0说明系统处于稳态(即静态)的⼯作状态。
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)<>0说明系统处于加速。
<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是ω, p 不变。
转动惯量折算前后动能不变原则是能量守恒0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为 Tω不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的2逼⾼速轴的2⼤得多?因为ω,?D2/375. ωG?D2/375. 不变转速越⼩2越⼤,转速越⼤2越⼩。
2.7 如图2.3(a)所⽰,电动机轴上的转动惯量2.52, 转速900;中间传动轴的转动惯量162,转速60。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量1=900/300=311512+ 12=2.5+2/9+16/225=2.792.2.8如图2.3(b)所⽰,电动机转速950 ,齿轮减速箱的传动⽐J1= J2=4,卷筒直径0.24m,滑轮的减速⽐J3=2,起重负荷⼒100N,电动机的费轮转距2M1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。