机械原理课程设计摇摆式输送机设计说明书
- 格式:docx
- 大小:100.32 KB
- 文档页数:12
机械原理课程设计摇摆一、教学目标本课程旨在让学生了解和掌握机械原理中的摇摆现象,通过学习,学生应达到以下目标:1.知识目标:学生能够理解摇摆的定义、类型和特点,掌握摇摆的运动规律和应用。
2.技能目标:学生能够运用所学知识分析实际问题,通过实验和设计,培养动手能力和创新能力。
3.情感态度价值观目标:培养学生对机械原理的兴趣,激发学生探索科学的热情,培养学生的团队协作和沟通交流能力。
二、教学内容本课程的教学内容主要包括以下几个部分:1.摇摆的定义和分类:介绍摇摆的基本概念,区分不同类型的摇摆。
2.摇摆的运动规律:讲解摇摆的运动特点,引导学生理解周期性运动的相关原理。
3.摇摆的应用:分析摇摆现象在实际生活中的应用,如钟表、秋千等。
4.实验与设计:安排实验让学生亲身体验摇摆现象,并进行相关设计,巩固所学知识。
三、教学方法为提高教学效果,本课程将采用以下教学方法:1.讲授法:用于讲解基本概念、运动规律和应用,确保学生掌握基础知识。
2.讨论法:学生分组讨论,培养学生的思考和沟通能力。
3.案例分析法:分析实际案例,引导学生将理论知识应用于实际问题。
4.实验法:安排实验课,让学生亲自动手,增强实践能力。
四、教学资源为实现教学目标,我们将准备以下教学资源:1.教材:《机械原理》及相关辅助教材,为学生提供系统性的学习资料。
2.参考书:提供相关领域的参考书籍,丰富学生的知识体系。
3.多媒体资料:制作PPT、视频等资料,直观展示摇摆现象,提高学生的学习兴趣。
4.实验设备:准备摇摆实验所需的设备,确保实验教学的顺利进行。
五、教学评估为全面、客观地评估学生的学习成果,本课程将采用以下评估方式:1.平时表现:关注学生在课堂上的参与程度、提问回答等情况,给予及时的反馈和鼓励。
2.作业:布置相关的练习题和项目任务,检验学生对知识的掌握和运用能力。
3.考试:安排期末考试,测试学生对本课程知识的全面理解和运用能力。
4.实验报告:评估学生在实验过程中的操作技能和问题解决能力。
摇摆式输送机课程设计一、设计背景及意义随着工业生产自动化程度的提高,输送设备在各类生产线中发挥着重要作用。
摇摆式输送机作为一种新型的输送设备,具有结构简单、运行稳定、输送效率高等特点,广泛应用于食品、药品、电子等行业。
本课程设计旨在让学生了解摇摆式输送机的工作原理、结构特点及设计方法,培养学生在实际工程中分析问题、解决问题的能力。
二、设计内容及要求1. 了解摇摆式输送机的工作原理和结构特点;2. 学会分析摇摆式输送机的运动规律和力学性能;3. 掌握摇摆式输送机的部件选型和参数计算方法;4. 能够运用CAD软件进行摇摆式输送机的结构设计;5. 编写课程设计说明书,包括设计计算、图纸及相关技术要求。
三、设计步骤1. 查阅相关资料,了解摇摆式输送机的发展现状、应用领域及发展趋势;2. 分析摇摆式输送机的工作原理,掌握其主要组成部分及其功能;3. 学习摇摆式输送机的运动学和力学分析,了解其运动规律及受力情况;4. 根据实际需求,进行摇摆式输送机的部件选型和参数计算;5. 运用CAD软件进行摇摆式输送机的结构设计,绘制相关图纸;6. 编写课程设计说明书,总结设计过程及心得体会。
四、关键技术与创新点1. 摇摆式输送机的运动规律分析:通过对摇摆式输送机的运动学分析,得出其运动规律,为后续的部件选型和参数计算提供理论依据;2. 部件选型和参数计算:根据实际需求,合理选择摇摆式输送机的电机、减速器、链条等部件,并进行参数计算;3. 结构设计:运用CAD软件进行摇摆式输送机的结构设计,确保其结构合理、紧凑;4. 课程设计说明书的编写:详细记录设计过程、计算方法、图纸及相关技术要求,为后续的类似设计提供参考。
五、设计成果与应用前景1. 设计成果:完成摇摆式输送机的结构设计,绘制相关图纸,编写课程设计说明书;2. 应用前景:摇摆式输送机在食品、药品、电子等行业具有广泛的应用前景,本设计可为相关企业提供技术支持,提高生产效率。
摆动式搬运机课程设计一、课程目标知识目标:1. 学生能理解摆动式搬运机的基本结构及其工作原理;2. 学生能掌握摆动式搬运机在设计过程中涉及的关键物理概念,如简单机械、力的作用等;3. 学生能描述摆动式搬运机在工业和生活中的应用。
技能目标:1. 学生能运用简单机械原理分析摆动式搬运机的工作过程;2. 学生能通过小组合作,设计并制作一个简易的摆动式搬运机模型;3. 学生能运用科学方法对摆动式搬运机模型进行测试和优化。
情感态度价值观目标:1. 培养学生对摆动式搬运机的兴趣,激发他们探索工业机械的热情;2. 培养学生团队协作精神,增强他们面对问题的自信心和解决能力;3. 增进学生对我国工业发展的了解,培养他们的民族自豪感和责任感。
二、教学内容本章节教学内容主要包括以下三个方面:1. 摆动式搬运机的基本原理与结构:- 简介摆动式搬运机的定义、分类及其在工业中的应用;- 分析摆动式搬运机的工作原理,包括简单机械原理、力的作用等;- 介绍摆动式搬运机的主要部件及功能。
2. 摆动式搬运机的设计与制作:- 解析摆动式搬运机设计过程中的关键步骤和注意事项;- 学习使用工具和材料,进行摆动式搬运机模型的制作;- 探讨如何优化设计,提高摆动式搬运机的搬运效率。
3. 摆动式搬运机的测试与优化:- 制定测试方案,对摆动式搬运机模型进行实验测试;- 分析测试数据,找出存在的问题,并提出改进措施;- 验证优化后的摆动式搬运机模型的性能。
教学内容参考教材相关章节,按照以下进度安排:1. 摆动式搬运机基本原理与结构(第1课时);2. 摆动式搬运机设计与制作(第2-3课时);3. 摆动式搬运机测试与优化(第4课时)。
三、教学方法针对本章节内容,采用以下多样化的教学方法,以激发学生的学习兴趣和主动性:1. 讲授法:- 教师通过生动的语言和丰富的实例,讲解摆动式搬运机的基本原理与结构,使学生初步建立概念;- 结合教材,阐述摆动式搬运机设计与制作的关键步骤,为学生提供理论指导。
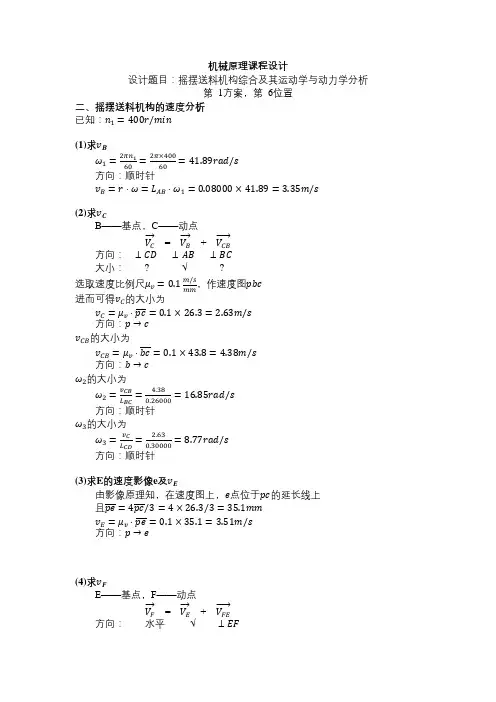
机械原理课程设计设计题目:摇摆送料机构综合及其运动学与动力学分析第 1方案,第 6位置二、摇摆送料机构的速度分析已知:n 1=400r/min(1)求v Bω1=2πn 160=2π×40060=41.89rad/s方向:顺时针v B =r ⋅ω=L AB ⋅ω1=0.08000×41.89=3.35m/s(2)求v CB ——基点,C ——动点 V C → = V B → + V CB →方向: ⊥CD ⊥AB ⊥BC大小: ? √ ?选取速度比例尺μv =0.1m/s mm ,作速度图pbc进而可得v C 的大小为v C =μv ⋅pc =0.1×26.3=2.63m/s方向:p →cv CB 的大小为v CB =μv ⋅bc =0.1×43.8=4.38m/s方向:b →cω2的大小为ω2=v CB L BC = 4.380.26000=16.85rad/s方向:顺时针ω3的大小为ω3=v C L CD = 2.630.30000=8.77rad/s方向:顺时针(3)求E 的速度影像e 及v E由影像原理知,在速度图上,e 点位于pc 的延长线上 且pe =4pc/3=4×26.3/3=35.1mmv E =μv ⋅pe =0.1×35.1=3.51m/s方向:p →e(4)求v FE ——基点,F ——动点 V F → = V E → + V FE →方向: 水平 √ ⊥EF大小: ? √ ?根据上述方程,继续在速度图pbce 上作出F 点的速度影像f 进而可得v F 的大小为v F =μv ⋅pf =0.1×38.8=3.88m/s方向:p →fv FE 的大小为v FE =μv ⋅ef =0.1×9.1=0.91m/s方向:e →fω4的大小为ω4=v FE L EF =0.910.46000=1.98rad/s方向:逆时针(5)速度综合v B =3.35m/s v C =2.63m/s v CB =4.38m/sv E =3.51m/s v F =3.88m/s v FE =0.91m/sω1=41.89rad/s (顺时针)ω2=16.85rad/s (顺时针)ω3=8.77rad/s (顺时针)ω4=1.98rad/s (逆时针)三、摇摆送料机构的加速度分析(1)求a CB ——基点,C ——动点 a C → = a CD n → + a CD t → = a B → + a CB n → + a CB t → 方向: ? C →D ⊥CD B →A C →B ⊥BC 大小: ? √ ? √ √ ? 其中:a B 的大小为a B =ω12⋅L AB =41.892×0.08000=140.4m/s 2 a CB n 的大小为a CB n =ω22⋅L BC =16.852×0.26000=73.8m/s 2 a CD n 的大小为a CD n =ω32⋅L CD =8.772×0.30000=23.1m/s 2选取加速度比例尺μa =2.0m/s 2mm ,作加速度图πb ′c ′ 进而可得a C 的大小为 a C =μa ⋅πc ′=2×36.8=73.6m/s 2方向:π→c ′a CB t 的大小为a CB t =μa ⋅n ′c c ′=2×10.8=21.6m/s 2方向:n ′c →c ′a CD t 的大小为a CD t =μa ⋅n"c c ′=2×35.0=70.0m/s 2方向:n"c →c ′α2的大小为α2=a CBt L BC =21.60.26000=83.1rad/s 2 方向:逆时针α3的大小为α3=a CD t L CD =70.00.30000=233.3rad/s 2 方向:顺时针(2)求a S2由影像原理知,在加速度图上,s ′2点位于b ′c ′的中点a S2=μa ⋅πs ′2=2×52.6=105.2m/s 2方向:π→s ′2(3)求E 的加速度影像e’及a E由影像原理知,在加速度图上,e’点位于πc ′的延长线上 且πe ′=4πc ′/3=4×36.8/3=49.1mma E =μa ⋅πe ′=2×49.1=98.2m/s 2方向:π→e ′(4)求a FE ——基点,F ——动点 a F → = a E → + a FE n → + a FE t →方向: √ √ F →E ⊥EF大小: ? √ √ ?其中:a FE n 的大小为a FE n =ω42⋅L EF =1.982×0.46000=1.8m/s 2根据上述方程,继续在加速度图πb ′c ′e ′上作出F 点的加速度影像f ′ 进而可得a F 的大小为a F =μa ⋅πf ′=2×55.6=111.2m/s 2方向:π→f ′a FE t 的大小为a FE t =μa ⋅n ′f f ′=2×28.9=57.8m/s 2 方向:n ′f →f ′α4的大小为α4=a FEt L EF =57.80.46000=125.7rad/s 2 方向:逆时针(5)求a S4由影像原理知,在加速度图上,s′4点位于e′f′的中点a S4=μa⋅πs′4=2×50.4=100.8m/s2方向:π→s′4(6)求a S1,a S3,a S5a S1=a B/2=70.2m/s2a S3=a C=73.6m/s2a S5=a F=111.2m/s2(7)加速度综合a B=140.4m/s2a C=73.6m/s2a CB n=73.8m/s2a CB t=21.6m/s2a CD n=23.1m/s2a CD t=70.0m/s2a E=98.2m/s2a F=111.2m/s2a FE n=1.8m/s2a FE t=57.8m/s2a S1=70.2m/s2a S2=105.2m/s2a S3=73.6m/s2a S4=100.8m/s2a S5=111.2m/s2α2=83.1rad/s2(逆时针)α3=233.3rad/s2(顺时针)α4=125.7rad/s2(逆时针)四、摇摆送料机构的动态静力分析已知:G1=36N G2=60N G3=72N G4=85N G5=85N J S1=0.030kg⋅m2J S2=0.080kg⋅m2J S3=0.100kg⋅m2J S4=0.120kg⋅m2P r=−4000N1.各构件的惯性力,惯性力矩:F i2=m2⋅a S2=G2⋅a S2/g=60×105.20/9.8=644.08N(与a S2方向相反)F i3=m3⋅a C=G3⋅a C/g=72×73.60/9.8=540.73N(与a C方向相反)F i4=m4⋅a S4=G4⋅a S4/g=85×100.80/9.8=874.29N(与a S4方向相反)F i5=m5⋅a F=G5⋅a F/g=85×111.20/9.8=964.49N(与a F方向相反)M i2=J S2⋅α2=0.080×83.08=6.65N⋅m(顺时针)M i3=J S3⋅α3=0.100×233.33=23.33N⋅m(逆时针)M i4=J S4⋅α4=0.120×125.65=15.08N⋅m(顺时针)ℎi2=M i2/F i2=6.65/644.08=10.3mmℎi3=M i3/F i3=23.33/540.73=43.2mmℎi4=M i4/F i4=15.08/874.29=17.2mm2.动态静力分析(1)以杆组4-5为示力体对杆4进行分析,求R34t杆4对点F求力矩得:−R34t L EF+F i4ℎFi4F−M i4/μl+G4ℎG4F=0解得R34t=120N根据平衡条件有 G 4→ +F i4→ +P r → +G 5→ +F i5→ +R 34t → +R 34n → +R 65→ =0 选取比例尺μF =100N mm ,作力多边形图R 65=μF ⋅l 65=100×31.6=3160N R 34n =μF ⋅l 34n =100×66.4=6640N(2)以杆组2-3为示力体对杆2进行分析,求R 12t杆2对点C 求力矩得:R 12t L BC −F i2ℎFi2C −M i2/μl +G 2ℎG2C =0 解得R 12t =224N对杆3进行分析,求R 63tR 43n =R 34n =6640N R 43t =R 34t =120N杆3对点C 求力矩得:−R 63t L DC +M i3/μl +R 43t ℎ43tC +R 43n ℎ43nC =0 解得R 63t =2206N根据平衡条件有 G 2→ +F i2→ +R 43t → +R 43n → +G 3→ +F i3→ +R 12t → +R 12n → +R 63n → + R 63t → =0 选取比例尺μF =100N mm ,作力多边形图R 12n =μF ⋅l 12n =100×125.3=12530N R 63n =μF ⋅l 63n =100×98.3=9830N(3)以曲柄1为示力体R 21n =12530N R 21t =224NR 21=√(R 21n )2+(R 21t )2=√125302+2242=12532.00N 根据平衡条件有 R 21→ +G 1→ +R 61→ =0M b −R 21ℎ21=0 选取比例尺μF =100N mm ,作力多边形图于是可以求得R 61=μF ⋅l 61=100×125.5=12550N M b =R 21ℎ21=587.52N ⋅m其方向为顺时针(4)力综合F i2=644.08N F i3=540.73N F i4=874.29N F i5=964.49N M i2=6.65N ⋅m M i3=23.33N ⋅m M i4=15.08N ⋅m ℎi2=10.3mm ℎi3=43.2mm ℎi4=17.2mm R 65=3160N R 34n =6640N R 34t =120NR 34=√(R 34n )2+(R 34t )2=√66402+1202=6641.08N R 43n =6640N R 43t =120NR 43=√(R 43n )2+(R 43t )2=√66402+1202=6641.08N R 63n =9830N R 63t =2206NR 63=√(R 63n )2+(R 63t )2=√98302+22062=10074.42N R 12n =12530N R 12t =224NR12=√(R12n)2+(R12t)2=√125302+2242=12532.00N R21=12532.00N R61=12550.00NM b=587.52N⋅m(顺时针)。
摆动式运输机课程设计一、课程目标知识目标:1. 学生能够理解摆动式运输机的基本结构、工作原理及在工业中的应用。
2. 学生掌握摆动式运输机关键部件的名称、功能及相互之间的关系。
3. 学生了解摆动式运输机的设计参数,如运动速度、承载能力等。
技能目标:1. 学生能够运用所学知识,分析摆动式运输机在实际工作过程中的运动特点。
2. 学生通过小组合作,设计并绘制出一种简易的摆动式运输机模型。
3. 学生能够运用数学知识,对摆动式运输机的运动轨迹进行初步计算。
情感态度价值观目标:1. 培养学生对摆动式运输机及其相关工程技术的兴趣,激发学生的创新意识。
2. 通过课程学习,培养学生合作、探究、解决问题的能力,增强学生的自信心。
3. 培养学生关注工业发展,认识到工程技术在国民经济中的重要作用,增强学生的社会责任感。
课程性质:本课程为工程技术类课程,旨在让学生了解摆动式运输机的工作原理,培养学生的动手操作能力和团队协作能力。
学生特点:六年级学生具有较强的求知欲和动手能力,对新鲜事物充满好奇心,但可能对复杂理论知识掌握不足。
教学要求:结合学生特点,注重理论联系实际,以学生为主体,教师为主导,采用启发式教学,引导学生主动探究、合作学习,提高学生的实践能力和创新能力。
通过分解课程目标为具体学习成果,为教学设计和评估提供依据。
二、教学内容1. 摆动式运输机的基本概念与结构- 运输机定义及分类- 摆动式运输机结构组成及关键部件2. 摆动式运输机工作原理及性能参数- 摆动式运输机工作原理- 常见性能参数介绍(如运动速度、承载能力等)3. 摆动式运输机在工业中的应用- 摆动式运输机在各行各业的应用案例- 摆动式运输机的优势与局限性4. 摆动式运输机模型设计与制作- 设计原则与步骤- 模型制作材料与工具- 小组合作完成模型设计与制作5. 摆动式运输机运动轨迹分析- 运动轨迹的基本概念- 运用数学知识进行初步计算与分析教学内容安排与进度:第一课时:摆动式运输机基本概念与结构学习第二课时:摆动式运输机工作原理及性能参数学习第三课时:摆动式运输机在工业中的应用案例学习第四课时:摆动式运输机模型设计与制作(1)第五课时:摆动式运输机模型设计与制作(2)第六课时:摆动式运输机运动轨迹分析与总结教学内容与课本关联性:本教学内容以课本中关于摆动式运输机的相关知识为基础,结合学生的认知水平,系统性地组织与安排教学活动,确保学生能够掌握摆动式运输机的基本原理和应用。
自动机械课程设计说明书题目:摆式送料机构总体设计姓名:学号:专业:班级:学院:农业工程与食品科学学院指导教师:2012年6月9日目录前言 (2)第一章课程设计的指导书 (3)§1-1 课程设计目的 (3)§1-2 课程设计任务 (3)第二章摇摆式输送机设计过程 (4)§2-1 工作原理 (4)§2-2 设计要求及原始数据 (5)§2-3 设计内容及工作量 (5)§2-4 其他设计方案 (5)§2-5 利用解析法确定机构的运动尺寸 (6)§2-6 连杆机构的运动分析 (12)第三章传动系综合 (14)§3-1 电机的初步选择 (14)§3-2 V带的初步选择 (15)第四章课程设计总结 (18)第五章参考文献 (18)前言自动机械设计是一门以机构为研究对象的学科。
自动机械课程设计是使学生较全面的、系统的巩固和加深自动机械课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。
我们将从机构的运动学以及机器的动力学入手,研究机构运动的确定性和可能性,并进一步讨论机构的组成原理,从几何的观点来研究机构各点的轨迹、位移、速度和加速度的求法,以及按已知条件来设计新的机构的方法。
第一章自动机械设计课程设计指导书一.自动机械设计课程设计的目的自动机械设计课程设计是自动机械设计课程教学中最后的一个重要的实践性教学环节,是培养学个进行自动机械总体方案设计、运动方案设计、执行机构选型设计,传动方案设计控制系统设计以及利用用计算机对工程实际中各种机构进行分析和设计能力的一个重要的川练过程。
其目的如下:(1)通过课程设计,综合运用所学的知识,解决工程实际问题。
并使学生进一步巩固和加深所学的理论知识。
(2)使学生得到拟定机械总体方案、运动方案的训练,并且有初步的机械选型与组合及确定传动方案的能力,培养学生开发、设计、创新机械产品的能力。
摆式输送机课程设计一、课程目标知识目标:1. 学生能够理解摆式输送机的基本结构及其工作原理;2. 学生能够掌握摆式输送机的主要部件名称及其功能;3. 学生能够了解摆式输送机在工业生产中的应用领域。
技能目标:1. 学生能够通过观察、分析,运用所学的知识对摆式输送机的故障进行初步诊断;2. 学生能够运用实际操作,完成摆式输送机的简单组装与调试;3. 学生能够运用绘图软件,绘制摆式输送机的基本结构图。
情感态度价值观目标:1. 培养学生对机械设备的兴趣,激发他们学习机械知识的热情;2. 培养学生团队协作、共同解决问题的能力,增强合作意识;3. 培养学生关注工业生产,了解机械设备在国民经济发展中的重要性。
分析课程性质、学生特点和教学要求:1. 课程性质:本课程为机械基础知识课程,以实践操作和理论结合为主;2. 学生特点:学生在本年级已具备一定的机械基础知识,具有较强的动手能力和探究精神;3. 教学要求:教师需采用多元化的教学手段,引导学生主动参与,注重实践与理论的结合。
二、教学内容1. 摆式输送机的基本结构- 输送机各部件名称及作用- 输送带的类型及特点2. 摆式输送机的工作原理- 输送带的运动原理- 驱动装置与输送带之间的动力传递3. 摆式输送机的应用领域- 工业生产中的实际应用案例- 不同行业对摆式输送机的需求4. 摆式输送机的故障诊断与维护- 常见故障及其原因- 故障诊断方法与维护措施5. 摆式输送机的组装与调试- 组装步骤及注意事项- 调试方法与调试标准6. 输送机结构图的绘制- 绘图软件的使用- 结构图的绘制方法与技巧教学大纲安排:第一课时:摆式输送机的基本结构及各部件作用第二课时:摆式输送机的工作原理与运动分析第三课时:摆式输送机的应用领域及行业需求第四课时:摆式输送机的故障诊断与维护第五课时:摆式输送机的组装与调试实践第六课时:输送机结构图的绘制与展示教学内容与课本关联性:本教学内容以教材中关于摆式输送机的相关知识为基础,结合实际工业生产案例,注重理论与实践相结合,旨在提高学生对摆式输送机的认识和应用能力。
《机械原理课程设计》摇摆式输送机的设计摘要:摇摆式输送机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。
物料的输送是利用机构在某些位置输料槽有相当大加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目的。
关键词:减速器;传输机;摇摆0绪论当今社会随着科技的发展人们对于各种资源的需求和消耗是非常巨大的因此就会牵涉到资源的开采问题如何能够高效率,低风险,无污染的开发矿物资源是当今社会面临的重大难题。
所以针对矿产资源而开发的矿山摇摆式输送机的应用就越来越广泛。
事实上人们对输送机的研究从来没有停止过为了满足不同的要求出现了各式各样的输送机有摇摆式输送机和带式输送机等。
摇摆式输送机作为一种传统的输送机械,适用范围非常广。
除粘性大的物料以外,一般的固体散状物料和成件物品均可输送。
已被用于采矿、冶金等部门。
矿山摇摆式运输机能够在恶劣的生产条件下进行工作可以满足很多种工作条件适用范围非常广泛。
由于它的牵引构件和承载构件大多由金属材料制成因而与其他输送机械相比,所输送物料的适应性更强。
摇摆式运输机可输送重的、具有锐利棱边的、磨损性及腐蚀性强的散状物料或物品同时适宜输送高温(600一700℃)物料和成品物体。
另外在输送过程中还可以进行干燥、冷却、分类、清选等各种工艺作业。
1摇摆式运输机机构结构原理如图1所示,电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽 9 作往复移动,放置在槽上的物料10 借助摩擦力随输料槽一起运动。
1.电机2.传动装置3.执行机图1摇摆式输送机示意图2摇摆式输送机机构结构设计通过查询一般摇摆式输送机说明手册得到一些关键数据如下表所示。
表1a.利用作图法确定机构的运动尺寸根据数据确定六连杆机构的尺寸采用图一所示的机构进行设计,并用CAD作图解法,图解法CAD图如图2所示。
图2根据表1数据,可求得LDB=0.6LDC=0.6*0.27m=0.162m,并做出摇杆的两个极限位置DB1,DB2,利用公式θ=180(K-1)/(K+1),计算出θ=10.19°。
机械原理课程设计说明书目录第一章机械原理课程设计前言 (1)§1-1 课程设计的目的 (1)§1-2 课程设计的任务 (2)第二章:摇摆式输送机设计过程 (2)§2-1 工作原理 (2)§2-2 设计要求和原始数据 (3)§2-3 设计内容及工作量 (4)§2-4 其他设计方案 (4)§2-5 利用作图法确定机构的运动尺寸 (5)§2-6 连杆机构的运动分析 (7)(一)、速度分析 (8)(二)、加速度分析 (10)§2-7 机构的动态静力分析 (14)§2-8 飞轮转动惯量的确定 (15)第三章:课程设计总结 (18)参考文献 (19)第一章机械原理课程设计前言机械原理是一门以机器和机构为研究对象的学科。
机械原理课程设计是使学生较全面的、系统巩固和加深机械原理课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。
我们将从机构的运动学以及机器的动力学入手,研究机构运动的确定性和可能性,并进一步讨论的组成原理,从几何的观点来研究机构各点的轨迹、位移、速度和加速度的求法,以及按已知条件来设计新的机构的方法。
机械原理课程设计所研究的问题又可归纳为二类:(1)、根据已有的机构和主要参数来分析该机构和所组成机构的各种特性,即结构分析,运动分析。
(2)、根据预期的各种特性来确定新的机构的形式,结构和参数,即机构的设计问题,如机构的运动设计,机构的平衡设计以及速度的调节。
电子计算机的应用为此次课程设计提供方便,我们可以利用AutoCAD作图,SolidWorks建模并仿真,从而能看到机构的运动。
§1-1 课程设计的目的机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析的训练,是机械原理课程的一个重要的实践性教学环节。
机械原理课程设计任务书设计题目:摇摆送料机构设计及分析1 课程设计的目的和任务1.1 课程设计的目的机械原理课程设计是机械原理教学的一个重要组成部分。
机械原理课程设计的目的在于进一步巩固和加深学生所学的机械原理理论知识,培养学生独立解决实际问题的能力,使学生对机械的运动学和动力学的分析和设计有一较完整的概念,并进一步提高电算、绘图和使用技术资料的能力,更为重要的是培养开发和创新机械的能力。
1.2 课程设计的任务1、方案设计(至少3种方案)2、选择最优方案(为任务书中给出方案)3、用图解法对牛头刨床的连杆机构进行运动分析和动力分析。
要求画出A1图纸一张,写出计算说明书一份。
2 机构简介摇摆送料机构主要有铰链四杆机构和曲柄滑块机构组成,如图1所示。
电动机经减速装置(图中未画出)使曲柄1转动,通过1-2-3-4,使滑块5沿导路作往复运动,以实现送料的目的。
为例缩短空程时间,提高生产效率,机构有急回运动。
3 已知数据摇摆送料机机构简图如图1所示。
设计数据:已知各构件尺寸:85x =,160y =,80AB l mm =,260BC l mm =,300CD l mm =,100CE l mm =,460EF l mm =。
各构件重量及重心位置:136G N =,1S 在A 点,260G N =,2S 在BC 中点,372G N =,3S 在C 点, 485G N =,4S 在EF 中点,585G N =,5S 在F 点。
各构件对其重心的转动惯量:210.03I kgm =, 220.08I kgm =,230.1I kgm = ,240.12I kgm =。
作用在滑块5上的水平阻力(生产阻力)4000r P N =-。
且当工作行程的前1/10和回程时,50r P N =。
曲柄1顺时针方向匀速回转,1400/min n r =。
图1 摇摆送料机机构简图在连杆机构中,曲柄有30个连续等分的位置1~30,2个工作行程的极限位置1和20',距滑块左极限为/10H 时的曲柄位置6'。
机械原理课程设计摇摆式输送机摇摆式输送机是一种常用的输送设备,能够将物体在水平方向上往返运动。
通过机械原理课程的学习,我们可以了解到摇摆式输送机的工作原理以及设计方法。
本文将介绍一种摇摆式输送机的课程设计,以帮助读者更深入地理解机械原理课程的知识。
一、摇摆式输送机的工作原理摇摆式输送机是利用电机的转动将物体推送到振动的导槽中,通过导槽的振动将物体传送到另一端。
摇摆式输送机包含减速机、电机、导槽和输送带等组件。
其中,减速机和电机是输送机的主要驱动部件,导槽和输送带则是物料的传输部件。
二、摇摆式输送机的设计1、摇摆式输送机的结构设计摇摆式输送机的结构一般包括导槽、振动器、输送机和支架等部件。
其中,导槽用于将物体从起点运输到终点,振动器用于产生振动,输送带用于将物体传送到终点。
2、摇摆式输送机的运动学设计运动学设计是指根据物体的运动轨迹和速度,设计输送机的结构和运动方式。
在摇摆式输送机的设计中,需要确定导槽和振动器的运动规律,以保证输送物体的平稳传输。
3、摇摆式输送机的动力学设计动力学设计是指根据输送机的结构和运动方式,计算出所需的动力和动力转换机构。
在摇摆式输送机的设计中,需要确定所需的电机功率和减速机比例,以满足输送物体的运动需求。
三、摇摆式输送机实验为了验证摇摆式输送机的设计效果,可以进行实验。
实验步骤如下:1、选择合适的物料进行实验,如砖块、铁块等。
2、将物料置于输送机起点,启动电机。
3、观察物料在导槽中的运动轨迹和速度,以判断设计是否合理。
4、调整电机功率和减速机比例,以适应不同类型的物料输送需求。
总之,摇摆式输送机是一种实用的输送设备,有广泛的应用前景。
通过机械原理课程的学习和课程设计,我们可以深入了解摇摆式输送机的工作原理和设计方法,进而提高机械设计能力和实践技能。
机械原理课程设计说明书题目:摇摆式输送机学院:机电工程学院班级:--------学号: ------------设计者: -------指导教师:***2011 年月日目录一、机械原理课程设计的目的和内容________________________ 21.1课程设计的目的_____________________________________ 21.2课程设计的题目_____________________________________ 21.3工作原理 __________________________________________ 21.4 设计要求和原始数据________________________________ 31.5 设计内容及工作量__________________________________ 4二、摇摆式输送机设计过程_________________________________ 42.1 其他设计方案____________________________________ 42.2图解法确定机构的运动尺寸___________________________ 62.3 连杆机构的运动分析________________________________ 72.31图解法分析 _______________________________________ 7(一)、速度分析____________________________________ 8 (二)、加速度分析_________________________________ 102.32用SolidWorks建模仿真所得运动曲线图如下__________ 122.4机构的动态静力分析________________________________ 14 第三章:课程设计总结_____________________________________ 15 参考文献________________________________________________ 16一、机械原理课程设计的目的和内容1.1课程设计的目的机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析的训练.是机械原理课程的一个重要的实践性教学环节。
目录绪论 (2)一方案设计 (3)二.电动机的选择与计算 (5)1.电动机类型的选择 (5)2.电动机功率的选择 (5)三.传动装置的运动及动力参数的选择及计算 (5)1.传动比 (5)2.各个轴的转速计算 (6)3.各轴的输入功率计算 (6)四.V 带的设计计算 (6)1.计算功率P C (6)2.选取V带型号 (6)3.验算带速 (6)4.从动带轮直径 (6)5.传动比 (7)6.从动轮转速 (7)7.确定中心距a和带长 (7)8.验算小带轮包角Α1 (7)9.确定V带根数Z (8)10.计算单根V带初拉力F (8)11.计算对轴的压力FQ (8)12.确定带轮的结构尺寸 (8)五.齿轮的设计计算 (8)1、高速级减速齿轮设计(直齿圆柱齿轮) (8)1、低速级减速齿轮设计(直齿圆柱齿轮) (10)六.轴的直径计算及校核 (12)1.高速轴的设计 (12)2.中间轴的设计 (19)3.低速轴的设计........................... 错误!未定义书签。
七.键连接的选择及计算..................... 错误!未定义书签。
1.高速轴................................. 错误!未定义书签。
2.中间轴................................. 错误!未定义书签。
3.低速轴................................. 错误!未定义书签。
八.滚动轴承的计算......................... 错误!未定义书签。
九.润滑和密封方式的选择................... 错误!未定义书签。
十.箱体及附件的结构设计和选择 ............. 错误!未定义书签。
1.箱体的选择............................. 错误!未定义书签。
2.箱体的结构尺寸......................... 错误!未定义书签。
摆动式运输机机构课程设计
摆动式运输机是一种特殊的飞行器,它的翅膀可以摆动起伏,实现对飞行过程中的稳定、操控以及缩短起飞和降落距离的影响。
为了设计摆动式运输机机构课程,我们需要涵盖以下内容:
1. 摆动式运输机的原理和设计概述:介绍摆动式运输机的原理,包括翅膀摆动的机构设计和工作原理,以及相应的稳定性和操控性优势。
2. 摆动式运输机机构设计的要求和挑战:讲解摆动式运输机机构设计面临的要求和挑战,如结构强度、摆动机构的可靠性和灵活性等。
3. 摆动式运输机机构的设计方法和工具:介绍摆动式运输机机构的设计方法和工具,包括模型分析、仿真和优化设计等。
4. 摆动式运输机机构关键部件的设计:详细介绍摆动式运输机机构的关键部件设计,如摆动关节、扭转箱和控制系统等。
5. 摆动式运输机机构的性能测试和验证:讲解摆动式运输机机构的性能测试和验证,包括静态和动态加载试验等。
6. 摆动式运输机机构的改进和优化:探讨摆动式运输机机构的改进和优化方向,如减轻结构重量、提高摆动机构的响应速度和精度等。
7. 摆动式运输机机构的应用和发展前景:分析摆动式运输机机
构在实际应用中的前景,并探讨未来可能的发展方向,如自适应控制和智能化设计等。
通过以上的课程设计,学生可以全面了解摆动式运输机的机构设计原理和方法,掌握相关的设计工具和技术,以及了解其应用和发展前景。
同时,培养学生的创新能力和团队合作精神,以应对复杂的机构设计和工程挑战。
机械原理课程设计摇摆式输送机说明书负责人:何竞飞学院:机电工程学院班级:机械1102班学号: 0806110229 日期: 2013年 7月1 日目录1.设计任务及原始参数…………………………………………… 2.运动方案设计……………………………………………………2.1 主机构方案…………………………………………………2.2 电动机——主机构(齿轮传动机构方案)………………2.3 总体方案图…………………………………………………3. 电动机选择……………………………………………………….3.1 电动机型号………………………………………………3.2 电动机的功率……………………………………………4. 传动比分配………………………………………………………5. 齿轮机构设计……………………………………………………5.1齿轮参数选择…………………………………………………5.2变位齿轮设计…………………………………………………6. 主机构设计………………………………………………………7. 主机构运动分析…………………………………………………8. 主机构受力分析…………………………………………………9. 主机构速度波动调节……………………………………………9.1等效力矩确定………………………………………………9.2最大盈亏功计算……………………………………………9.3等效转动惯量计算…………………………………………9.4飞轮转动惯量计算…………………………………………10. 设计总结…………………………………………………………1. 课程设计的任务机械原理课程设计的任务是对机器的主体机构进行运动分析、动态静力分析,求出所有的运动副反力及平衡力矩。
要求学生根据设计任务,绘制必要的图纸(或编制计算程序),编写设计计算说明书。
要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。
机械原理课程设计摇摆
式输送机设计说明书 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
机械原理课程设计说明书题目:摇摆式输送机
学院:机电工程学院
班级:--------
学号: ------------
设计者: -------
指导教师:张日红
2011 年月日
目录
一、机械原理课程设计的目的和内容
课程设计的目的
机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析的训练,是机械原理课程的一个重要的实践性教学环节。
其目的是:
(1)、进一步加深学生所学的理论知识。
(2)、培养学生独立解决有关本课程实际问题的能力,使学生对于机
械运动学和动力学的分析与设计有一较完整的概念。
(3)、通过对具体问题的分析、计算、制图、技术资料的使用,电算程序的编制及计算机使用等各环节,培养学生独立分析问题和解决问题的工程技术能力。
课程设计的题目
摇摆式输送机
工作原理
摇摆式输送机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。
如图1所示,电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽9作往复移动,放置在槽上的物料10借助摩擦力随输料槽一起运动。
物料的输送是利用机构在某些位置输料槽有相当大加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目的。
1——电机 2——传动装置 3——执行机构
图1摇摆式输送机示意图
设计要求和原始数据
设计要求:
该布置要求电机轴与曲柄轴垂直,使用寿命为5年,每日二班制工作。
输送机在工作过程中,载荷变化较大,允许曲柄转速偏差为±5%,六连杆执行机构的最小传动角不得小于40°,执行机构的传动效率按计算,按小批量生产规模设计。
原始数据:
设计内容及工作量
1、根据摇摆式输送机的工作原理,拟订2~3个其他形式的机构,画出机械系统传动简图,并对这些机构进行对比分析。
2、根据设计数据确定六杆机构的运动尺寸,取lDB=。
要求用图解法设计,并将设计结果和步骤写在设计说明书中。
3、连杆机构的运动分析。
将连杆机构放在直角坐标系下,编制程序分析出滑块8的位移、速度、加速度及摇杆6的角速度和角加速度,作出运动曲线,并打印上述各曲线图。
4、机构的动态静力分析。
物料对输料槽的摩擦系数f =, 设摩擦力的方向与速度的方向相反,编制程序求出外加力大小,作出曲线并打印外加力的曲线,求出曲柄最大平衡力矩和功率。
5、编写设计说明书一份。
应包括设计任务、设计参数、设计计算过程等。
二、摇摆式输送机设计过程
其他设计方案
图2-1
图2-2
以上两种机构的分析对比:图2-1为六杆机构,直接通过电动机带动曲柄滑块转动从而是连杆1回转终使滑块左右运动,从而达到输送货物的效果。
其优点是成本比较低,结构简便,缺点是摩擦大,耗费能量多。
图2-2通过送电动机带动曲柄4回转,从而使8往复移动达到输送货物的效果。
该机构的滑块8和作平面复杂运动的连杆的动平衡比较容易,但是该机构的设计和计算比较复杂。
图解法确定机构的运动尺寸
图2-3
设计步骤:
① 根据原始数据,可求得m m 150m m 2506.06.0=⨯==DC DB l l ;
② 作出摇杆的两个极限位置12DB DB 、,利用公式180K-1)/K+1)θ=((,计算出
10.19θ=;
③ 选取一点P ,使12B PB θ∠=。
P 点的简单做法是做212()B M B B ⊥和1B N (与12
B B 成090θ-)的交点。
通过12,,P B B 三点作圆;
④ 在圆周上任取一点作为曲柄的轴心,则机构的极位夹角均等于θ,作直线l 与此
圆的交点O ,此即为曲柄中心O 。
然后你标出相应数据。
设计结果:
由1OB l 208.95mm =,2l 379.78mm OB =可得:
连杆机构的运动分析
图解法分析
如下图2-4所示,选取杆6与垂直线的夹角为30°时的位置,用图解法进行分析。
图2-4
根据原始数据要求,杆件4的转速min
118r n =,则其角速度4ω为:
(一)、速度分析
A 点的线速度s m s m A 05.108542.035.12l OA 4=⨯==ων
大小: √
方向:⊥DB ⊥OA ⊥AB 选取速度比例尺()mm s m 01.0=νμ,作速度分析图(如下图所示)可得:
图2-5
由此可得:
杆5的角速度为:s rad s rad l AB 13.115
.017.0BA
5===νω 摇杆6的角速度为:s rad s rad l DB 4.615
.096.0B
6===νω C 点的速度为:s
m s m l DC C 60.125.04.66=⨯=⋅=ων 大小: √
方向:水平 ⊥DC 垂直 其中s
m 60.1C C7==νν。
选取速度比例尺()mm s m 01.0=νμ,作速度分析图(如下图所示)可得:
图2-6
(二)、加速度分析
A 点的加速度为:22224A 03.1308542.035.12s m s m l a OA =⨯=⋅=ω
B 点相对于D 点的法向加速度为:
B 点相对于A 点的法向加速度为:
大小: 0 √ √ √
方向: B →D ⊥DB A →O B →A ⊥AB 选取加速度比例尺()mm s m a 2
1.0=μ,作加速度分析图,如图2-7可得:
图2-7
由此可得:
摇杆6的角加速度为:22BD 627.8915
.039.13s rad s rad l a DB ===τα C 点的加速度为:2222
624.1025.04.6s m s m l a DC C =⨯=⋅=ω
大小: √ √
方向: 水平 C →D 水平 垂直 其中2C C724.10s m a a ==,22C786k C7837.1081.04.622s m s m a =⨯⨯=⋅=νω
则选取加速度比例尺
()
mm
s
m
a
2
1
=
μ,作加速度分析图(如上图所示)可得:
图2-8
用SolidWorks建模仿真所得运动曲线图如下(机构模型图见后面):推杆8的位移曲线:
推杆8的速度曲线:
推杆8的加速度曲线:
摇杆6的角速度曲线:
摇杆6的角加速度曲线:
机构的动态静力分析
在物料上添加一个摩擦力,大小为:
方向为水平向左。
此摩擦力在内为9604N,在~内为0。
表达式为:
IF:9604,9604,0)
最大平衡力矩为:
功率为:
输送机模型图:
第三章:课程设计总结
作为一名机械自动化专业的大二学生,我觉得做机械原理课程设计是十分有意义的,而且是十分必要的。
在已度过的大学时间里,我们大多数接触的是公共和专业基础课,在课堂上掌握的仅仅是专业课的理论知识,而做类似的课程设计就为我们提供了良好的实践平台,使我们能把所学的专业基础课理论知识运用到实践中去。
在做本次课程设计的过程中,我感触最深的当属用AutoCAD画图和用SolidWorks建模仿真。
在制作过程中,我对以前学过的技术更加熟练,同时又学到了更多的技术。
两周的课程设计虽然已经结束了,但是从中学到的知识会让我受益终身。
相信这次设计带给我们的严谨的学习态度和一丝不苟的科学作风将会给我们未来的工作和学习打下一个更坚实的基础。
发现、提出、分析、解决问题和实践能力的提高都会受益于我在以后的学习、工作和生活中。
参考文献
1、机械设计课程设计指导书龚溎义罗圣国李平林张力乃黄少颜编龚溎义主编高等教育出版社 1990年4月第二版机械设计课程设计图册
2、《机械原理》(第七版)孙桓陈作摸葛文杰主编高等教育出版社,
3、《机械原理课程设计》沈乃勋等编高等教育出版社公开出版 1998年。
4、《SolidWorks及COSMOSMotion机械仿真设计》张晋西郭学琴编着清华大学出版社,
5、《COSMOS高级教程:COSMOSMOtion》叶修梓陈超祥主编机械工业出版社,。