一种旋转变压器软解码方法
- 格式:pdf
- 大小:1.65 MB
- 文档页数:3
旋变软解码原理介绍在数字信号处理领域,信号解码是一个重要的操作,用于将模拟信号转换为数字信号。
旋变软解码是一种常用的信号解码方法,它通过使用软件算法来解析旋变信号。
本文将详细介绍旋变软解码的原理及其应用。
旋变信号旋变信号是一种具有特定频率和相位的周期性信号。
它可以是正弦波、方波、三角波等。
旋变信号广泛应用于通信、控制系统等领域。
在信号解码过程中,需要将旋变信号转换成数字信号,以便进行进一步的处理和分析。
数字信号处理在讨论旋变软解码原理之前,我们首先介绍数字信号处理(Digital Signal Processing,DSP)技术。
DSP是将连续时间的模拟信号转换为离散时间的数字信号的一种处理技术。
它包括信号采集、滤波、变换、解码等一系列处理步骤。
旋变软解码原理旋变软解码原理是一种基于数学算法的信号解码方法。
它通过将旋变信号转换为数字信号来实现信号解析。
主要原理包括以下几个步骤:采样旋变信号是连续时间的信号,无法直接进行数字处理。
因此,首先需要对旋变信号进行采样,即在一定的时间间隔内对信号进行取样。
采样频率要足够高,以保证信号的完整性和准确性。
量化采样后得到的信号是模拟值,需要将其转换为数字值。
量化是将连续的模拟信号值转换为离散的数字信号值的过程。
在量化过程中,需要对信号进行分段,并为每个段赋予一个表示该段信号值的数字值。
编码量化后的信号是数字值,但仍然需要进行编码,以便进一步处理。
编码是将数字值转换为特定格式的过程,常用的编码方式有二进制、格雷码、反码等。
解码解码是将编码后的数字信号转换为原始的旋变信号的过程。
解码器通常使用与编码器相反的算法,将数字信号还原为模拟信号。
旋变软解码器采用一系列的算法来实现解码过程,其中最常用的算法是傅里叶变换。
应用旋变软解码广泛应用于通信、音频处理、影像处理等领域。
以下是一些旋变软解码的典型应用:无线通信在无线通信中,旋变软解码被用于解析接收到的信号。
通过对接收到的信号进行解码,可以还原出原始的数据信息。
旋变软解码电路简介旋变软解码电路是一种用于解码旋转编码器信号的电路。
旋转编码器是一种常见的输入设备,用于测量旋转物体的位置和方向。
旋变软解码电路可以将旋转编码器的输出信号转换为数字信号,以便进一步处理和分析。
工作原理旋变软解码电路的工作原理基于旋转编码器的输出信号。
旋转编码器由两个感应器组成,分别测量旋转物体的位置和方向。
每当旋转物体发生变化时,感应器会产生一个脉冲信号。
这些脉冲信号由旋变软解码电路处理,并转换为数字信号。
旋变软解码电路的核心部分是一个计数器。
计数器根据感应器的脉冲信号进行计数,并根据旋转方向进行增减。
通过对计数器的读取,可以得到旋转编码器的位置和方向信息。
为了提高解码精度,旋变软解码电路通常还包括一个滤波器。
滤波器用于平滑感应器的脉冲信号,以减少噪声干扰和抖动。
通过滤波器处理后的信号,可以更准确地测量旋转物体的位置和方向。
电路设计旋变软解码电路的设计需要考虑以下几个方面:1. 输入接口旋转编码器的输出信号通常是两个脉冲信号,分别对应旋转物体的位置和方向。
因此,旋变软解码电路需要设计相应的输入接口,以接收旋转编码器的信号。
2. 计数器计数器是旋变软解码电路的核心部分。
它根据旋转编码器的脉冲信号进行计数,并根据旋转方向进行增减。
计数器的设计需要考虑解码精度和计数范围。
3. 滤波器滤波器用于平滑感应器的脉冲信号,以减少噪声干扰和抖动。
滤波器的设计需要考虑滤波器类型、截止频率和响应时间等参数。
4. 数字输出旋变软解码电路的最终目的是将旋转编码器的信号转换为数字信号,以便进一步处理和分析。
因此,电路设计需要考虑如何输出数字信号,并提供相应的接口。
应用领域旋变软解码电路广泛应用于各种需要测量旋转物体位置和方向的领域,包括但不限于以下几个方面:1. 机械工程旋变软解码电路可以用于测量机械设备的旋转部件,如电机、舵机、机械臂等。
通过测量旋转物体的位置和方向,可以实现精确的控制和定位。
2. 汽车工业旋变软解码电路可以用于测量汽车方向盘、油门踏板等旋转部件的位置和方向。

一种旋转变压器位置解码系统的设计方案
1.引言
随着永磁同步电机在工业、农业、航天等各领域的广泛应用,永磁同步电机在电动汽车驱动系统领域也得到同步发展。
众所周知,永磁同步电机的稳定可靠运行,需要安装位置传感器来检测位置信号。
因旋转变压器(简称旋变)通过与相应的解码芯片配合即可对电机转子位置进行检测,所以旋变作为较为可靠的绝对位置传感器被广泛采用。
目前很多专家学者开始研究旋变位置解码系统[1-4],随着旋变及其解码芯片技术的不断发展,旋变的可靠性更高,解码电路
也更加紧凑。
本文采用当前最新一代可变磁阻旋变和与之配合的解码芯片
AD2S1205,设计了相应的旋变位置解码系统,并通过测试系统验证了系统的
可靠性。
2.旋变工作原理
旋变的通常配置是初级绕组位于转子上,两个二次绕组位于定子上。
本系统采用的可变磁阻旋变的转子上则不存在绕组,如图1所示,初级绕组和二次绕组均位于定子上,转子的这种特殊设计可使得次级耦合随着角位置变化而发生正弦变化。
无论何种配置,旋变正弦绕组的输出电压是S1-S3,余弦绕组的输出电压是
S2-S4,如(1)式和(2)式所示。
其中:θ为轴角,ω为转子激励角频率,E0为转
子激励幅度。
可变磁阻旋变初级绕组采用交流基准源激励,两个次级绕组机械上交叉90°。
定子二次绕组上耦合出的电压幅度是转子相对于定子角位置θ的函数,旋变输。
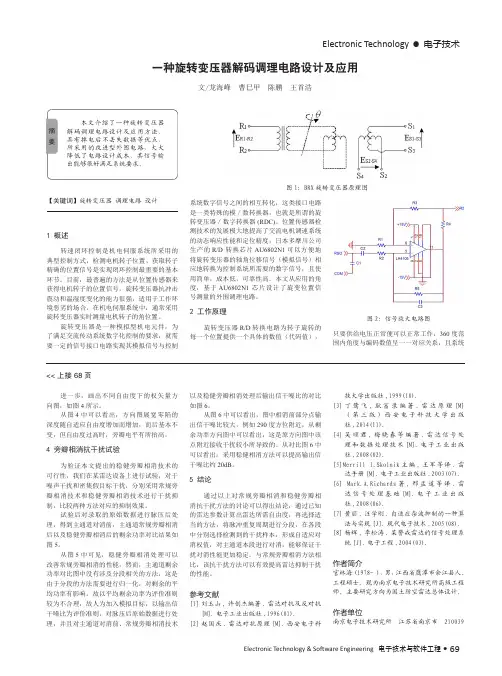
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 69【关键词】旋转变压器 调理电路 设计1 概述转速闭环控制是机电伺服系统所采用的典型控制方式,检测电机转子位置、获取转子精确的位置信号是实现闭环控制最重要的基本环节。
目前,最普遍的方法是从位置传感器来获得电机转子的位置信号,旋转变压器抗冲击震动和温湿度变化的能力很强,适用于工作环境恶劣的场合。
在机电伺服系统中,通常采用旋转变压器实时测量电机转子的角位置。
旋转变压器是一种模拟型机电元件,为了满足交流传动系统数字化控制的要求,就需要一定的信号接口电路实现其模拟信号与控制一种旋转变压器解码调理电路设计及应用文/龙海峰 曹巳甲 陈鹏 王首浩系统数字信号之间的相互转化,这类接口电路是一类特殊的模/数转换器,也就是所谓的旋转变压器/数字转换器(RDC)。
位置传感器检测技术的发展极大地提高了交流电机调速系统的动态响应性能和定位精度,日本多摩川公司生产的R/D 转换芯片AU6802N1可以方便地将旋转变压器的轴角位移信号(模拟信号)相应地转换为控制系统所需要的数字信号,且使用简单,成本低,可靠性高。
本文从应用的角度,基于AU6802N1 芯片设计了旋变位置信号测量的外围调理电路。
2 工作原理旋转变压器R/D 转换电路为转子旋转的每一个位置提供一个具体的数值(代码值),只要供给电压正常便可以正常工作,360度范围内角度与编码数值呈一一对应关系,且系统进一步,画出不同自由度下的权矢量方向图,如图4所示。
从图4中可以看出,方向图展宽零陷的深度随自适应自由度增加而增加,而后基本不变,但自由度过高时,旁瓣电平有所抬高。
4 旁瓣相消抗干扰试验为验证本文提出的稳健旁瓣相消技术的可行性,我们在某雷达设备上进行试验,对于噪声干扰和密集假目标干扰,分别采用常规旁瓣相消技术和稳健旁瓣相消技术进行干扰抑制,比较两种方法对应的抑制效果。
![一种满足功能安全要求的旋变软解码方法[发明专利]](https://uimg.taocdn.com/d5a70b2cb6360b4c2e3f5727a5e9856a561226d7.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011024398.4(22)申请日 2020.09.25(71)申请人 上海擎度汽车科技有限公司地址 201805 上海市嘉定区安亭镇园耀路168号1幢1层A区(72)发明人 邓海燕 陈晶杰 徐松云 邹仁刚 刘伟 (74)专利代理机构 上海宏京知识产权代理事务所(普通合伙) 31297代理人 李敏(51)Int.Cl.H03M 13/23(2006.01)(54)发明名称一种满足功能安全要求的旋变软解码方法(57)摘要本发明提供一种满足功能安全要求的旋变软解码方法,涉及旋变变压器软解码领域,所述方法包括步骤1:产生旋变激励信号,并且对旋变激励信号进行波形校验;步骤2:采集旋变输出信号,并且旋变输出信号进行VADC软解码处理和旋变软解码处理;步骤3:将VADC软解码处理结果和旋变软解码处理结果进行结果校验。
本发明不需要增加额外的成本,就能够实现旋变激励信号的有效性诊断,能够按照需求配置旋变激励信号的特性和旋变激励信号处理参数,对旋变输出信号的旋变软解码结果进行有效诊断,大大的提高汽车电控系统的安全性,满足功能安全要求。
权利要求书1页 说明书4页 附图2页CN 112511174 A 2021.03.16C N 112511174A1.一种满足功能安全要求的旋变软解码方法,其特征在于,所述方法包括以下步骤:步骤1:产生旋变激励信号,并且对旋变激励信号进行波形校验;步骤2:采集旋变输出信号,并且对旋变输出信号进行VADC软解码处理和旋变软解码处理;步骤3:将VADC软解码处理结果和旋变软解码处理结果进行结果校验。
2.根据权利要求1所述的一种满足功能安全要求的旋变软解码方法,其特征在于,所述步骤1具体流程为:步骤101:通过主MCU的GTM模块产生一个预设频率a的旋变激励信号数字序列;步骤102:配置主MCU的寄存器,通过寄存器通道将旋变激励信号以变占空比、预设频率b的PWM波形式进行输出;步骤103:配置DSADC模块的寄存器,通过寄存器通道将旋变激励信号采样结果和旋变激励信号进行输出,即生成旋变输出信号;步骤104:通过主MCU将旋变激励信号采样结果的波形与旋变激励信号数字序列的波形进行校验,如果校验通过,则旋变激励信号有效,否则,旋变激励信号无效。