旋转变压器解码电路设计
- 格式:pdf
- 大小:11.55 MB
- 文档页数:58
永磁同步电机旋转变压器解码算法优化设计马利娇,贾欣&,陈少华(北京信息科技大学仪器科学与光电工程学院,北京100192)摘要:针对旋转变压器解码电路误差对永磁同步电机(PMSM )转子位置检测精度的影响,深入分析了解码电路工作 ,基 度/速度观测器, 了 高精度快响应的旋转变压器信 方法。
电路采用低电压运放MCA33202对旋变输出正弦和余弦信号进行解码,基于解码后的估算角度构建了单位反馈闭环系 ,优化了解码电路关键器,提高了 PMSM 转子位置检测精度。
通1台2.5 kW 高速PMSM 了该的有效 。
关键词:永磁同步电机;旋转变压器;观测器;解码电路;位置检测精度中图分类号:TM 341文献标志码:A文章编号:1673-6540(2021)02-0031-05doi : 1052177/emca.2020.187Optimal Design of Resolver Decoding Algorithm for Permanent MagnetSynchronous Motor *收稿日期:2020-11-02;收到修改稿日期:2020-12-E4*基金项目:国家自然科学基金项目(62003047);北京市委组织部骨干人才项目(2018000020124+103) 作者简介:马利娇(1995-),女,硕士研究生,研究方向为永磁电机控制’陈少华(1985-),男,博士,副教授,研究方向为高速电机控制、高效电力变换’(通信作者)MA Lijiao , JIA Xinyu , CHEN Shaohua(School of Instrument Scienca and Opto-Electronica Engineering ,Beijing InformationScienca & Technology University ,Beijing 100192,China)Abstrach : The erroo of resolves decoding circuit has effect on the rotoo position detection accuracy of permanent magnet synchronous motoe ( PMSM). In ordee to reducc tie inOuencc ,the principle of decoding circuit ir analyzed.A decoding circuit with the advantaaes of high precision and fast response is proposed. The low voVage operationaVamplifier MCA33202 is used t 。
重庆大学硕士学位论文基于FPGA的旋转变压器解码算法与系统设计姓名:刘柏林申请学位级别:硕士专业:电气工程指导教师:廖勇20070529图4.7FPGA内部配置Fi94.7configurationofFPGA5旋转变压器解码系统软件设计本设计与传统的设计不同的是基于FPGA的旋转变压器解码系统的设计主要工作在于硬件解码算法模块的设计和硬件的设计,相对来说在软件设计上所占的比重相对较小.主要是针对处理器的初始化程序、AD采样中断程序和串口通信中断程序的设计。
与通用微处理器不同的是,FPGA的软核处理器Nios2的内部资源需要根据软件实现的功能自行定制。
如串口、定时器和输入输出端口等。
这样可以充分的利用软硬件资源,涉及的灵活性大大的提高.图5.1软核处理器NOIS定制ConsUl删onofNOISFig5.15.1系统的主程序本系统采用模块化的设计.从AD采样开始,到采样数据经过解码算法模块解算出转子位置角并控制串口输出。
系统软件工作的流程如图5.2:(1)系统上电复位以后,首先对EPlCl2Q240C8内部的软核处理器进行初始化,设置定时器中断、AD采样程序中断、串口工作方式和中断方式.(2)启动定时器、AD采样程序。
(3)等待中断。
7实验结果及分析7.1实验设备及条件在实验室利用以下的设备进行试验:直流稳压电源(±12v)计算机示波器万用表旋转变压器解码器旋转变压器一台一台一台一台一台(自制)一台±12V的直流稳压电源为旋转变压器一数字转换器提供稳定的直流电源;旋转变压器解码器PCB板上FPGA的.玎AG接口与计算机的串口相连来调试和加载程序,计算机用来调试软件和作为解码器的串口输出显示器:信号发生器和旋转变压器用来产生系统需要的三路输入信号;示波器用来检测电路中各部分的输出信号的波形。
旋转变压器解码器如图7.1。
圈7.1旋转交压器解码器Fi97.1Resoiverdecoder。
基于AD2S1210的旋变解码电路设计刘芸邑;郑婕;李燕;田桂平;魏伟;陈洁【摘要】This paper introduces a resolver decoding circuit based on the position detection of a step-stare panoramic imaging platform. Through the use of AD2S1210(revolving transformer/digital converting IC produced by ADI), to decode the resolver J78XFS009, a decoding circuit is designed. The design includes the basic working of ADS2S1210, the interface circuit and the connecting circuit between the micro-controller and resolver and so on. The whole circuit has the advantages of simple structure, high reliability, working stability, high precision and better noise immunity, etc. It can be used under harsh environments, so it has high value of practical use. The experimental results show that the circuit can detect the position signals of the DC motor accurately, so it can contribute to achieve a more precise closed loop control of DC motors.%介绍了在步进凝视扫描成像平台的位置检测中,传感器的解码电路。

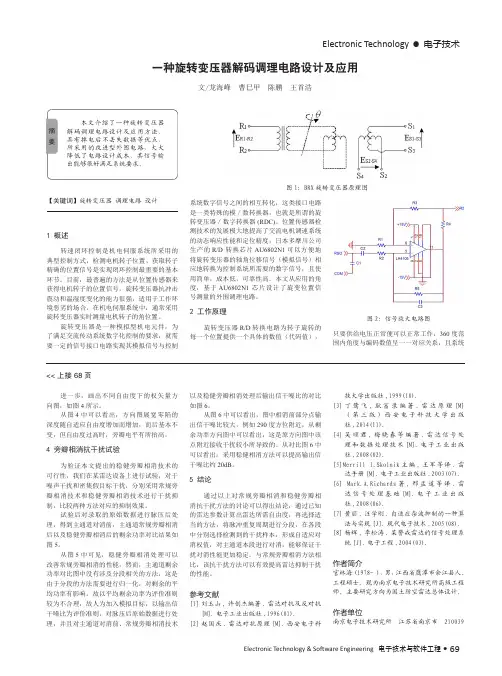
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 69【关键词】旋转变压器 调理电路 设计1 概述转速闭环控制是机电伺服系统所采用的典型控制方式,检测电机转子位置、获取转子精确的位置信号是实现闭环控制最重要的基本环节。
目前,最普遍的方法是从位置传感器来获得电机转子的位置信号,旋转变压器抗冲击震动和温湿度变化的能力很强,适用于工作环境恶劣的场合。
在机电伺服系统中,通常采用旋转变压器实时测量电机转子的角位置。
旋转变压器是一种模拟型机电元件,为了满足交流传动系统数字化控制的要求,就需要一定的信号接口电路实现其模拟信号与控制一种旋转变压器解码调理电路设计及应用文/龙海峰 曹巳甲 陈鹏 王首浩系统数字信号之间的相互转化,这类接口电路是一类特殊的模/数转换器,也就是所谓的旋转变压器/数字转换器(RDC)。
位置传感器检测技术的发展极大地提高了交流电机调速系统的动态响应性能和定位精度,日本多摩川公司生产的R/D 转换芯片AU6802N1可以方便地将旋转变压器的轴角位移信号(模拟信号)相应地转换为控制系统所需要的数字信号,且使用简单,成本低,可靠性高。
本文从应用的角度,基于AU6802N1 芯片设计了旋变位置信号测量的外围调理电路。
2 工作原理旋转变压器R/D 转换电路为转子旋转的每一个位置提供一个具体的数值(代码值),只要供给电压正常便可以正常工作,360度范围内角度与编码数值呈一一对应关系,且系统进一步,画出不同自由度下的权矢量方向图,如图4所示。
从图4中可以看出,方向图展宽零陷的深度随自适应自由度增加而增加,而后基本不变,但自由度过高时,旁瓣电平有所抬高。
4 旁瓣相消抗干扰试验为验证本文提出的稳健旁瓣相消技术的可行性,我们在某雷达设备上进行试验,对于噪声干扰和密集假目标干扰,分别采用常规旁瓣相消技术和稳健旁瓣相消技术进行干扰抑制,比较两种方法对应的抑制效果。
特斯拉旋变解码电路拓扑
特斯拉的旋转变压器(旋变)解码电路拓扑是用于解码旋转变压器输出的信号,并将其转换为可用于控制系统或显示器的数字信号。
旋转变压器通常用于测量电机的旋转角度和速度,因此在电动车辆(如特斯拉汽车)的驱动系统中非常常见。
旋转变压器通常由定子和转子组成,其中定子上有绕组,转子上有磁场。
当转子旋转时,它会在定子的绕组中感应出电压,这个电压与转子的位置和速度有关。
解码电路的任务就是从这个感应电压中提取出有用的信息,如旋转角度和速度。
特斯拉的旋转变压器解码电路拓扑可能包括以下几个主要部分:
1.信号调理电路:这部分电路用于对从旋转变压器输出的模拟信号进行放大、滤波和线性化处理,以便后续的数字电路能够准确地处理这些信号。
2.模数转换器(ADC):ADC将经过调理的模拟信号转换为数字信号,以便微处理器或其他数字电路能够处理。
特斯拉可能会使用高分辨率的ADC来确保测量精度。
3.数字信号处理器(DSP)或微控制器(MCU):这部分负责接收来自ADC的数字信号,并运行算法来解码旋转角度和速度。
DSP或MCU可能会实现一些复杂的数学运算,如傅里叶变换、滤波或插值,以提高解码精度和稳定性。
4.通信接口:解码后的数据需要通过某种通信接口传输给其他系统组件,如车辆控制单元(VCU)或仪表盘显示器。
特斯拉可能会
使用CAN总线、LIN总线或以太网等车内通信协议。
需要注意的是,特斯拉的具体实现细节可能因车型和年份而异,而且特斯拉作为一家以保密著称的公司,其电路设计细节往往不会公开。
这里提供的信息主要是一般性的描述,而非特斯拉特定型号车辆的详细电路设计。
旋变位置解码系统的设计【摘要】基于旋转变压器及其解码芯片的原理与特点,采用AD2S1205解码芯片构建了旋变位置解码系统,并设计了相应的硬件电路、软件解码程序,搭建了旋变解码测试系统。
实验结果表明,旋变位置解码电路设计合理,信号时序正确,能够输出稳定可靠的位置信号。
【关键词】旋转变压器;AD2S1205;位置信号1.引言随着永磁同步电机在工业、农业、航天等各领域的广泛应用,永磁同步电机在电动汽车驱动系统领域也得到同步发展。
众所周知,永磁同步电机的稳定可靠运行,需要安装位置传感器来检测位置信号。
因旋转变压器(简称旋变)通过与相应的解码芯片配合即可对电机转子位置进行检测,所以旋变作为较为可靠的绝对位置传感器被广泛采用。
目前很多专家学者开始研究旋变位置解码系统[1-4],随着旋变及其解码芯片技术的不断发展,旋变的可靠性更高,解码电路也更加紧凑。
本文采用当前最新一代可变磁阻旋变和与之配合的解码芯片AD2S1205,设计了相应的旋变位置解码系统,并通过测试系统验证了系统的可靠性。
2.旋变工作原理旋变的通常配置是初级绕组位于转子上,两个二次绕组位于定子上。
本系统采用的可变磁阻旋变的转子上则不存在绕组,如图1所示,初级绕组和二次绕组均位于定子上,转子的这种特殊设计可使得次级耦合随着角位置变化而发生正弦变化。
图1 旋转变压器原理图无论何种配置,旋变正弦绕组的输出电压是,余弦绕组的输出电压是,如(1)式和(2)式所示。
其中:为轴角,为转子激励角频率,E0为转子激励幅度。
(1)(2)可变磁阻旋变初级绕组采用交流基准源激励,两个次级绕组机械上交叉90°。
定子二次绕组上耦合出的电压幅度是转子相对于定子角位置的函数,旋变输出信号如图2所示。
图2 旋变输出信号转换器跟踪轴角的原理为,转换器产生输出角,然后反馈以与输入角相比较。
当转换器正确跟踪输入角度时,二者之间的误差将被驱动至0。
为了测量误差,将(1)式乘以,(2)式乘以,其差值为:(3)通过利用内部产生的合成参考来解调该信号,(3)式可简化为(4)式:(4)当角度误差的值很小时,(4)式即近似等于。
毕业设计开题报告
学生姓名:学号:
学院:
专业:
设计/论文
题目:基于单片机的旋转变压器解码器设计指导教师:
2015 年 4 月 2 日
毕业设计开题报告
毕业设计开题报告
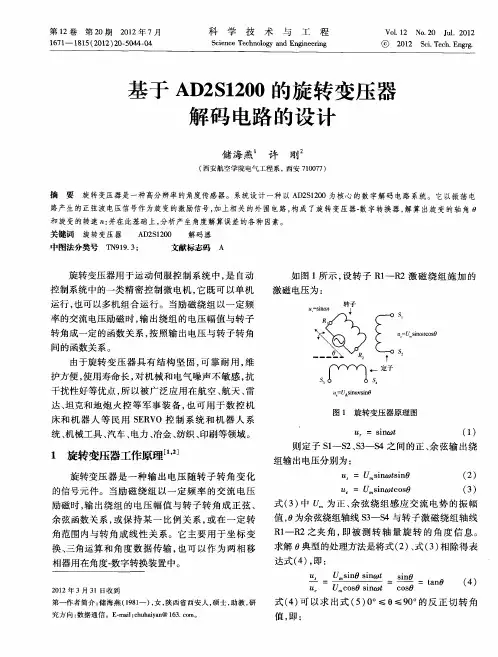
图1 旋转变压器结构
工作时,R1R2 作为激磁绕组的原边。
D1D2 和 D3D4 为固定在定子上的两相相互垂直的正弦绕组; Z1Z2 和 Z3Z4 为固定在转子上的两相相互垂直的正弦绕组。
工作时,D3D4 绕组开路,D1D2 绕组加入激磁电压,通常以 D1D2 和 Z1Z2 的夹角表示输入角。
设激磁绕组施加的激磁电压为:U1 = Um sinωt ( 1)则输出绕组 Z1Z2 和 Z3Z4 输出电压分别为:
图 2 分离器件搭建的解码系统框图
2.3 解码电路设计
采用 XMC4500 作为系统主控芯片,设计了两种旋转变压器的解码电路。
一种是使
图3 AD2S1210 解调相关电路
毕业设计开题报告。