6静态稳定解析
- 格式:ppt
- 大小:1.92 MB
- 文档页数:98
六足机器人步态规划及其静态稳定性研究张春阳;江先志【摘要】以一种新型六足机器人样机为研究对象,研究机器人直线行走步态及其在该步态下的稳定性.分别规划了一种六足机器人纵向与横向直线行走的三角步态,给出了六足机器人在三角步态下步长以及稳定裕度的计算方法,并分析了六足机器人在三角步态下的静态稳定性.六足机器人采用三角步态直线行走时,不考虑惯性力对机器人稳定性的影响,在其步长满足一定条件时,六足机器人是静态稳定的.【期刊名称】《成组技术与生产现代化》【年(卷),期】2016(033)002【总页数】8页(P40-47)【关键词】六足机器人;步态;静态稳定性【作者】张春阳;江先志【作者单位】浙江理工大学机械与自动控制学院,浙江杭州310018;浙江理工大学机械与自动控制学院,浙江杭州310018【正文语种】中文【中图分类】TP242.6科学技术的发展扩大了人类的活动空间,新型多足仿生机器人的研究越来越受到人们的关注.六足机器人因其步态相比八足机器人简单且高效,相比四足机器人具有更高的稳定性,所以六足机器人行走步态成为仿生机器人领域中研究的热点.六足机器人的步态规划是其行走的关键技术,步态规划直接关系到机器人的行走质量.好的行走步态,能保证机器人在行走过程中具有良好的稳定性以及较高的运动效率,反之,不仅不能使机器人获得良好的稳定性以及行走品质,而且很有可能导致机器人根本不能行走.经过人们对六足昆虫行走策略的研究,对于六足机器人,根据其在行走过程中支撑足的数目,可将其行走形式分为三角步态[1-5]、四足步态以及波动步态[6].其中,三角步态为六足机器人最常用的步态,其稳定性好、行走效率高.六足机器人在行走过程中,其步长对机器人稳定性具有一定的影响,为保证机器人具有良好的稳定性,机器人行走时应选取适当的步长.本文以六足机器人样机为研究对象,规划了六足机器人横向与纵向直行的三角步态,并结合其步长分析了机器人在采用三角步态直行时的稳定性.本文研究的六足机器人样机,以六足昆虫结构及运动特性为基础,采用结构仿生实现在复杂环境下灵活运动.图1是六足机器人样机.机器人机身以及其足部杆件均由铝合金材料制作而成,质量轻,强度高.机器人机身纵向整体长160 mm,中间宽130 mm,机身两端的宽度为75 mm,站立时机器人机身的几何中心距离地面85 mm.机器人每个足部拥有三个转动副:髋关节实现平行于机身平面的转动和垂直于机身平面的转动;膝关节实现垂直于机身平面的转动.髋关节的两个转动副的轴线相互垂直,髋关节第二个关节的轴线与膝关节轴线平行,机器人关节均用舵机驱动.图2为六足机器人的运动模型,标出了机器人机身尺寸以及足部关节间连杆的长度,并将机器人足部进行编号以方便后续讨论.步态是生物学领域的专业术语,是指人或动物通过肢体运动并前进的一种周期性形式.对于机器人而言,步态即机器人摆动足和支撑足周期性交替顺序的形式[7].为了分析步态,可将其每个周期分成多个部分.本文在对以仿生学为原理的六足机器人进行研究时,需要借鉴相关生物学概念[8],具体如下:(1)步态(Gait),为足部支撑足与摆动足周期性交替的形式.(2)支撑相(Support Phase),为足部落地并对机体起到支撑作用的状态.(3)摆动相(Swing Phase),为足部悬空并摆动的状态.(4)支撑多边形(Support Polygon),为足部支撑点所构成的凸多边形在水平面上的投影.(5)步长(Step Length),为行走系统支撑足与摆动足完成一个周期性交替动作,系统的重心前进或后退的距离.六足昆虫在行走过程中,采用的是三角步态,仿生六足机器人也是采用此步态.该步态速度快,灵活性高,稳定裕度大,机器人在运动时总有3个足对机器人进行支撑,每个支撑过程都使机器人向前运动一个步长,保障机器人机身平衡的同时使机器人获得最快的前进速度[9].本文所涉及六足机器人直行的三角步态,是重心固定的静步态,也就是机器人在迈步过程其重心一直处于不变的位置[10].相反,如果重心随机器人迈步而变动,则称为动步态.2.1 六足机器人纵向行走三角步态规划为方便描述六足机器人的纵向直行步态,将其6足进行编号(图3).六足机器人纵向行走初始,1、4、5号足抬起向前迈步处于摆动相,2、3、6号足进行支撑,保证足部支撑点构成的支撑三角形包络六足机器人重心在支撑平面内的投影,如图3(a)所示.当 1、4、5号足向前摆动到预定位置时,呈支撑相的2、3、6号足在各自髋关节舵机的作用下使机身前进一个步长S,如图3(b)和3(c)所示.当1、4、5号足完成向前迈步,随即进入支撑相,2、3、6号足抬起准备向前迈步,进入摆动相,如图3(d)所示. 当 2、3、6号足向前摆动到达预定位置的同时,处于支撑相的1、4、5腿在各自髋关节舵机的作用下使机身前进一个步长S,如图3(e)、图3(f)所示.上述过程循环往复,六足机器人便可以在地面上纵向行走.2.2 六足机器人横向行走三角步态规划六足机器人横向运动初始,2、3、6号足抬起向侧面(图4为右侧)迈步处于摆动相,1、4、5号足进行支撑,保证足部支撑点构成的支撑三角形包络六足机器人重心在支撑平面内的投影,如图4(a)所示.与2、3、6号足向侧面(图4为右侧)运动到预定位置的同时,呈支撑相的1、4、5号足在各自髋关节以及膝关节的舵机作用下使机身向侧面(图4为右侧)前进一个步长S,如图4(b)和(c)所示.当2、3、6号足完成向前迈步,随即进入支撑相,1、4、5号足抬起准备向前迈步,如图4(d)所示,进入摆动相.当 1、4、5号足向侧面(图4为右侧)运动到达预定位置时,呈支撑相的2、3、6腿在各自髋关节以及膝关节舵机作用下使机身向侧面(图4为右侧)前进一个步长S,如图4(e)和(f)所示.上述过程循环往复,六足机器人便可以在地面上横向行走.2.3 六足机器人直线行走三角步态相序六足机器人在纵向和横向行走过程中,足部两相循环变化使机器人前进,呈现明显的周期性和规律性.为了提高机器人在运动过程中的稳定性以及行走质量,支撑相的时间略大于摆动相的时间.这样可以保证机器人每一次摆动都能到位,给予机器人良好的支撑.六足机器人三角步态每条腿的两相变化如图5所示,其中黑色代表支撑相,白色代表摆动相.在六足机器人行走过程中,若已知机器人步长和迈步的频率,即可得知机器人移动速率.若迈步频率一定,机器人的速率由它的步长决定.因此,计算六足机器人步长对提高机器人移动效率以及移动的稳定性有着非常重要的意义.为了计算六足机器人三角步态下直线行走的步长,需要确定机器人足部关节在直行时的初始位姿,然后根据关节的初始位姿计算机器人直行的步长.3.1 六足机器人直行足部关节初始位姿确定当机器人纵向直线行走时,机器人从位置p1运动到p2时,机器人向前前进一个步长S1(图6).其中φ是机器人足髋关节向前向后摆动的最大角度,d是足部支撑点至髋关节关节轴线的距离.为方便研究,机器人的六足摆动角度均设为φ,支撑点至髋关节轴线的距离均设为d.在图7中,连杆L2,L3位置OPN为机器人纵向直线行走时,右侧足的支撑位姿,左侧足位姿与其相对于机身中轴线对称.连杆L2相对于连杆L1的延长线逆时针摆动θ1,连杆L3相对于连杆L2的延长线顺时针摆动θ2,此时L3垂直于地面,支撑点N至Joint1(髋关节)关节轴线的距离为d(对应图6中的d).当机器人横向直线行走时(图7),连杆L2,L3位置OGR为机器人向右横向行走时右侧足的位姿,左侧足位姿与其相对于机身中轴线对称.连杆L2相对于连杆L1的延长线逆时针摆动角度β1,连杆L2相对于连杆L1的延长线顺时针摆动角度β2.为了方便研究,机器人每侧足横向直行的位姿相同,两侧足的位姿关于机器人中轴线对称.当连杆L2、L3从位置OGR运动到OGM时,机器人机身向右侧前进一个步长S2.3.2 六足机器人直行步长计算根据几何关系,由图6可知:S1=2ssin(φ)机器人足部连杆L1、L2、L3的长度分别是l1、l2、l3,根据几何关系,由图7可知:d=l1+l2cos(θ1)GH=PN-(PK-GQ)=l3-l2sin(θ1)+l2sin(β1)∠MGH=arccos(GH/GM)=arccos(l3-l2sin(θ)+l2sin(β))/l3由式(1)—式(8)可得:根据式(1)和式(2),当θ1、φ为确定值时,六足机器人纵向直行的足部初始位姿及其步长确定.根据六足机器人纵向直行的初始位姿,由式(6)和式(8)得知,当θ1、φ、β1为确定值时,六足机器人横向直行足部初始位姿及其步长确定.六足机器人在足部确定位姿下,其横向和纵向直行的步长如式(9)所示.六足步行机器人在步行时能够保证机体处于平衡状态且不出现翻跌称为静态稳定性步行[11].本文中六足机器人的步态是静步态,不考虑机器人运动时产生的惯性力对其稳定性的影响.4.1 六足机器人三角步态稳定裕度Mcghee和Iswandhi于1976年提出静态稳定裕度SSM(Static Stability Margin)的概念[12].SSM稳定裕度的定义是重心投影点距离投影支撑多边形各边的最小距离,其数学表达式为:式中:SSSM为静态稳定裕度;ln为支撑足数,di G为重心投影至支撑多边形第i 条边的距离.当SSSM>0时,机器人处于稳定状态;反之,则是不稳定的.对于六足机器人来说,当机器人在运动时,其支撑多边形一直包络其重心在支撑平面内的投影,机器人的步态就是静态稳定的.图8所示,三角形区域表示机器人3个处于支撑相的足.在支撑平面内构成的稳定区域,只要机器人的重心在支撑平面内的投影G一直被其包络,机器人就是静态稳定的, 如果投影点超出了区域范围机器人便会失稳.S1、S2、S3是机器人重心投影点G距离机器人支撑三角形边界的距离,SSSM=min{S1,S2,S3}就是机器人行走状态下的稳定裕度.图9中所示L1,L4,L5点为某一瞬时机器人某3足在地面的支撑点,三角形L1,L4,L5为3个支撑足在支撑平面上构成的多边形. 其中点O为六足机器人重心投影点,X向为机器人横向行走的前进方向,Y轴方向为机器人横向运动的方向.OM1,OM2,OM3为六足机器人重心投影点在支撑平面内到支撑多边形L1,L4,L5各边的垂直距离,垂足为M1,M4,M5.由图9中L1,L5的坐标可得直线L1L5的斜率,则直线L1L5的方程为:由于直线OM1和直线L1L5垂直,因此OM1的斜率为,则直线OM1的方程为:可得以上两直线的交点M1的坐标:,用上述方法即可求M2,M3的坐标:,由此得出六足机器人重心投影点O到支撑三角形三条边的距离S1、S2、S3的值:六足机器人的稳定裕度为:4.2 六足机器人横向直行三角步态稳定性分析六足机器人在横向运动时,要保证重心投影点处于支撑多边形范围内,结合图7,其步长理论上满足关系<|OL4|(即S2<2(|OD|+d)),六足机器人将不会失稳.假设|AB|=2a、|GH|=2b、|CD|=2c(实际长度均可以在机器人机身测得),六足机器人的横向的临界步长应为:S2=2(|OD|+d)=2(c+l1+l2COS(θ1)).在六足机器人纵向与横向直行初始位姿确定后,即可计算此位姿下机器人横向三角步态直线行走的临界步长.当六足机器人横向直线行走时,若其步长小于临界步长,机器人的稳定裕度大于零,机器人静态稳定.本文规划的横向直行的三角步态,当六足机器人向右(左)横向运动时其足部末端点的运动范围不会越过机器人重心,而且其步长满足关系<d,即机器人重心投影点一直处于支撑三角形范围内,六足机器人横向直行过程保持静态稳定.4.3 六足机器人纵向直行三角步态稳定性分析六足机器人纵向直行时,机器人足向前摆动支撑,如果机器人的步长太大,机器人重心的投影将会在支撑三角形的范围之外,这时机器人的稳定裕度小于零,机器人失稳.为保证机器人在纵向直行过程中不出现失稳,需求出能保持机器人纵向行走不失稳的临界步长.图10所示,当六足机器人第1、4、5号足分别由点L1,L4,L5摆动至点L1′,L4′,L5′时,机器人的支撑三角形由L1L4L5变为L1′L4′L5′,机器人重心O正好落在此时支撑三角形L1′L4′L5′的L4′L5′边上.为方便研究,六足机器人每个足的摆动角度相同.为了机器人在纵向直行的过程中不失稳,保证机器人重心在支撑三角形L1′L4′L5′范围内,需保证直线L4′L5′在Y轴上的截距yb小于零.L4′L5′的坐标为:L4′(c+dcosφ,dsin φ)、L5′(-(a+dcos φ),b(-dsin φ)),则直线L4′L5′的方程是:当x=0时,,其中.将sin φ、cos φ代入yb中,整理可得:令yb=0,可得到:式(19)中a、b、c的值可在机器人本体上测得.当机器人纵向直行初始位置确定时,d的值随之确定,通过MATLAB解方程可得到六足机器人纵向直行的临界步长S1.只要机器人纵向行走的步长小于临界步长S1,其重心的投影就在支撑三角形范围内,机器人理论上不会失稳.由于机器人机械结构在制造上存在误差,步长需进一步调整,以保证机器人在行走过程中的步态静态稳定.本文针对六足步行机器人,规划其纵向与横向直线行走的三角步态,给出了六足机器人以这两种步态行走时步长以及稳定裕度的计算方法,结合步长分析了六足机器人直线行走的静态稳定性.对机器人直行时的稳定性分析得知,六足机器人以三角步态行走时稳定裕度和步长有着紧密的关系.当机器人的步长超过其能保持机身静态稳定的临界步长时,机器人在行走过程中稳定裕度将会小于零,机器人将失稳.根据本文分析,调整机器人关节的运动范围,机器人在行走过程中可以具有较大的稳定裕度,同时机器人具有较大的步长.这为设计机器人物理样机以及现有六足机器人直行稳定性的提高提供了理论依据.【相关文献】[1] 徐小云, 颜国正, 丁国清. 微型六足仿生机器人及其三角步态的研究[J].光学精密工程,2002,10(4):392-396.[2] 徐小云, 颜国正,丁国清,等. 六足微型仿生机器人及其控制系统的研究[J].计算机工程,2002,28(11):81-83.[3] YU S, YAN W. Design of low-level motion controller for a two-wheel mobile mini-robot [J]. Mechanical & Electrical Engineering Magazine, 2006,23(9):38-40,46.[4] HAN J, ZHAO S, LI J. Movement Gait Harmony Control for Hexapod Robot [J].Mechanical & Electrical Engineering Magazine,2004,21(4):8-10.[5] 金波,胡厦, 俞亚新. 新型六足爬行机器人设计[J]. 机电工程, 2007,27(6): 23-25,36.[6] 谭兴军.偏心轮腿六足机器人设计与分析[D].重庆:西南大学, 2011.[7] 杨新锋,刘克成. 基于特征融合的步态识别算法研究[J].计算机与现代化, 2012(8):24-27.[8] 徐帅.六脚仿生机器人运动步态控制研究[D].银川:宁夏大学,2013.[9] Schilling M, Schneider A, Cruse H, et al. Local control mechanisms in six-legged walking[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008:2655-2660.[10] 宋磊. 四足移动机器人步态规划与足力控制研究[D].哈尔滨:哈尔滨工业大学, 2007.[11] 谭小群,李军,赵国斌,等.一种重心调整装置在四足机器人步行中的应用[J].中国制造业信息化:学术版, 2008, 37(12): 25-28.[12] Mcghee R B,Iswandhi G I.Adaptive locomotion of a multi-legged robot over rough terrain[J].Systems,Man and Cybernetics,IEEE Transactions on,1979,9(4):176-182.。
简单电力系统静态稳定判据1. 引言电力系统是现代社会不可或缺的基础设施之一,其稳定运行对于保障供电质量和经济发展至关重要。
在电力系统的运行中,静态稳定性是一个重要的指标,它描述了系统在各种扰动条件下的恢复能力。
本文将介绍简单电力系统静态稳定判据的相关内容。
2. 电力系统静态稳定判据的定义电力系统静态稳定判据是指在电力系统运行中,系统能否在扰动后恢复到稳定状态的判定准则。
静态稳定性的判定可以通过计算电力系统的潮流分布和功率损耗来实现。
3. 静态稳定判据的基本原理静态稳定判据的基本原理是基于电力系统的潮流计算和功率损耗计算。
潮流计算是指在电力系统中计算各节点的电压和功率的过程,通过解析节点电压和功率的方程组,可以得到电力系统的潮流分布。
功率损耗计算是指计算电力系统中各个元件(例如输电线路、变压器等)的功率损耗,通过比较功率损耗的大小可以评估系统的稳定性。
4. 静态稳定判据的常用方法静态稳定判据的常用方法主要包括以下几种:4.1 感应机法感应机法是一种基于感应机模型的稳定判据方法,它通过建立电力系统的等值感应机模型,并分析感应机的稳定性来评估系统的静态稳定性。
感应机法的优点是计算简单、易于理解,但是对于复杂系统的判定效果有限。
4.2 潮流灵敏度法潮流灵敏度法是一种基于潮流计算的稳定判据方法,它通过计算节点电压和功率对系统参数的灵敏度来评估系统的静态稳定性。
潮流灵敏度法的优点是适用于复杂系统,可以考虑系统的参数变化对稳定性的影响,但是计算量较大。
4.3 Lyapunov方法Lyapunov方法是一种基于Lyapunov函数的稳定判据方法,它通过构造Lyapunov 函数并分析其导数的符号来评估系统的静态稳定性。
Lyapunov方法的优点是理论基础扎实,可以得到系统的稳定性界限,但是计算复杂度较高。
5. 静态稳定判据的应用静态稳定判据在电力系统的规划、运行和控制中有着广泛的应用。
在电力系统的规划中,静态稳定判据可以用于评估不同方案的稳定性,选择最优的方案。
第六章 电力系统静态稳定第一节 概述一、运动系统稳定性的一般定义运动系统都存在稳定性问题。
定义如下:一个运动系统处于平衡状态,若遭受某种扰动,经过一定的时间变化后,能恢复到原有平衡状态或新的平衡状态下运行,则称该运动系统是稳定的,否则是不稳定的。
【例6-1】b二、电力系统稳定性的特定含义电力系统中发电机都是同步发电机,电力系统的平衡状态是指所有发电机以同步(相同)速度运行。
当电力系统处于某种平衡状态(即发电机以相同速度)运行,遭受某种扰动后,发电机的速度发生变化,经历一定时间速度的变化,若所有发电机能恢复到同步(相同)速度下运行,则该系统是稳定的,否则是不稳定的。
在正常运行时(平衡状态),发电机输入机械功率T P 等于发电机发出的电磁功率E P (机械损耗很小,因此忽略不计),即E T P P =,发电机保持恒定速度运行。
当受到某种扰动(例如:负荷波动,导线发热、电阻变化、短路、切除线路等),发电机输出功率E P 要发生变化,但T P 不能跟随变化(因为调速系统由机械组成,不能瞬间完成),导致输入与输出功率不平衡,从而引起速度的变化。
受扰动各发电机E P 变化不一样,因此各发电机速度变化不一样,经过一段时间调整,若能够恢复到相同速度下运行,则系统是稳定的,否则是不稳定的。
三、电力系统稳定性的分类按扰动量的大小,电力系统稳定分为⎩⎨⎧大扰动下的稳定—暂态稳定小扰动下的稳定—静态稳定小扰动—如负荷正常变化、导线发热引起参数变化等。
其扰动量很小,因而可以对描述系统运动过程的非线性微分方程进行线性化处理,从而可用线性系统稳定性理论进行分析。
大扰动—如短路、切机、投切线路、投切变压器等。
其扰动量大,因而不能对描述系统运动过程的非线性微分方程进行线性化处理,从而只能用非线性系统稳定性理论进行分析。
四、如何判别稳定1. 以速度,即各机组频率。
2. 以相对转子位置角)(ij t δ的变化过程,即摇摆曲线。
若)(ij t δ能够回复到某一个稳定值则系统是稳定的。
电力系统暂态分析第七章电力系统静态稳定第三节小干扰法分析简单电力系统静态稳定穆钢教授东北电力大学电气工程学院2006年5月21日回顾⏹本章前两节我们已经学过了简单电力系统的静态稳定,和负荷的静态稳定,了解了一些基本概念和定性的分析方法。
⏹虽然定性的方法有助于我们理解问题,但要解决工程问题还是离不开定量的方法。
如何定量地分析简单系统的静态稳定性?这就是本节要学习的内容。
提要⏹1 问题的提出⏹2 单机无穷大系统数学模型⏹3 线性系统的特征值分析方法⏹4 关于运行点影响的分析⏹5 计及阻尼作用的稳定分析⏹6 结语1.问题的提出1.1 电力系统的互联现代电力系统多为互联大系统。
在我国,大电网互联仍处于进一步发展的态势中。
特别是三峡工程和特高压(交流1000kV,直流±800kV)电网的建设,是全国联网的巨大推动力。
下图表明我国电网互联的状况。
三峡远眺中国电力工业的总体规模发电装机容量0.473kW (世界平均0.5kW )发电量2156kWh (世界平均2500kWh)年份发电装机容量发电量2000年 3.19亿千瓦13685亿千瓦时2004年 4.407亿千瓦21870亿千瓦时2005年 5.1亿千瓦24713亿千瓦时2006年 6.22亿千瓦28344亿千瓦时2006年人均1.问题的提出1.1 电力系统的互联现代电力系统多为互联大系统,电力系统的互联有很多益处。
电网互联的效益:1)规模效益;2)错峰(时差)效益;3)水、火互补效益;4)电量(经济电量交换)和容量(功率)效益;5)备用效益(事故、运行、检修);6)提高供电质量,负荷波动(f)相互抵消;1. 问题的提出1.1 电力系统的互联电力系统的互联也面临很多挑战。
电网互联的挑战:1)需要更高电压等级的主干电网(投资巨大);2)运行方式调控难度加大(交流联网);3)易发生广泛波及式故障(交流联网);4)稳定行为更复杂,通常动态稳定性变差;5)稳定分析和稳定控制设计更复杂;6)电网稳定破坏的影响更大(8.14大停电)。
电力系统静态稳定电力系统静态稳定是指系统在受到外部扰动或负载变化时恢复到稳定工作状态所需的时长和稳定性的能力。
它是电力系统中重要的稳定性问题之一,对电网的保障和运行安全起着至关重要的作用。
随着电力系统规模的不断扩大和负荷的不断增加,电力系统静态稳定性的研究也逐步成为电力工程中的热点问题。
在现代化电力网络中,静态稳定性具有极高的重要性。
当系统处于不稳定状态时,电力网可能会发生瞬态过程,造成过电压、过流和电力设备的故障等问题,严重时还可能导致电网的崩溃。
因此,保证电力系统静态稳定性是电力系统运行的基础和保障。
电力系统的静态稳定性是指在负荷或外界干扰的情况下,系统重建平衡的能力。
系统的平衡直接受到负荷功率、发电功率和传输线路参数的影响。
如果系统负荷容量超过了电源容量,将容易导致电力系统的失稳。
失稳可能会导致电力设备和输电线路的过载,从而进一步导致系统的短路和停电。
电力系统的静态稳定性问题可以帮助工程师和运营商确定最佳的控制策略和拓扑结构,从而保证电力系统的稳定运行。
常见的控制策略包括开关容量调节和变压器分接头调节。
开关容量调节是一种在线调节负荷电流的技术。
变压器分接头调节是一种在线调节变压器的额定电压值以及调节传输线路的电感值的技术。
电力系统静态稳定性问题在建设电力系统时也应该被考虑。
例如,设计阶段就可以将稳定性因素纳入设计考虑,如选择适当的线路悬垂,采用高规格的低损耗的电力设备等。
总之,电力系统的静态稳定性是电力系统运行的基石和保障。
保证电力系统的静态稳定性需要多种策略的协同应用。
未来,随着电力系统的发展,静态稳定性问题将会成为电力工程中的重点研究领域,促进电力系统跨越发展。
第六章电力系统静态稳定计算电力系统运行的静态稳定性是指电力系统在某种正常运行状态下遭受微小的扰动,能否保持同步发电机同步运行的能力。
电力系统时刻都在遭受微小扰动,因此,保证电力系统运行的静态稳定是电力系统运行必不可少的条件。
电力系统静态稳定计算的目的,就是要查明电力系统在某一正常运行方式下能否保持静态稳定。
如果不能保持静态稳定,就应采取相应的措施。
电力系统静态稳定计算也分为简化模型和复杂模型两种。
由于篇幅的限制,这里只讨论简化模型的静态稳定计算。
第一节静态稳定计算的基本原理静态稳定计算一般采用小扰动法,也称小干扰法或小振荡法。
所谓小振荡法,就是首先列出描述电力系统运动的微分方程,这些微分方程通常是非线性的。
然后将它们在状态变量平衡点附近进行线性化,得出一组近似的线性微分方程。
最后用QR法计算线性微分方程组系数矩阵的特征根。
根据特征根在复平面上的特性,判别电力系统运行的稳定性。
在简化的发电机模型中,不考虑发电机的凸极效应,假定暂态电抗X d后的暂态电动势E'保持不变,同时不考虑调速系统的调节作用,即假定发电机输入机械功率P m恒定。
在简化模型中,负荷用恒定阻抗表示。
根据这些假定,电力系统运行方程只有发电机转子运动方程,即方程(5—1)与(5—2)。
由于发电机转速变化很小,一般假设=1。
转子运动方程(5-1 )与(5-2)合并后,可得d 2iT ji 六N(P mi P ei)(6—1)dti=1,2,…,f其中是发电机台数。
方程(6—1)进行线性化后,可得方程(6 — 5)中的S ij , S ii 是发电机电磁功率P e 对各发电机转子 位置角取偏导数,再由转子位置角在平衡点的数值代入求得的。
为此,必须将发电机电磁功率 P e 表示为各发电机转子位置角的函 数。
设系统网络原有n 个节点。
这些节点可以分为发电机节点、负 荷节点和联络节点。
负荷用恒定阻抗表示后,负荷节点也变成联 络节点。
发电机定子回路用一个暂态电动势E '串联一个暂态阻抗 为jX d 的支路表示后,系统网络结构如图6— i 所示。
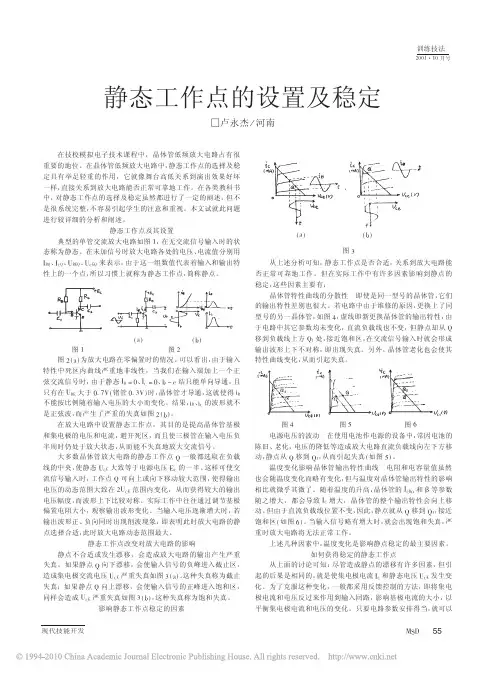
基本放大电路稳定静态工作点的原理1. 介绍基本放大电路是电子电路中最基本的一种电路,用于放大信号。
而稳定静态工作点则是保证放大器在正常工作状态下,输出信号能够准确地放大输入信号。
本文将从放大电路的基本原理出发,探讨基本放大电路稳定静态工作点的原理。
2. 放大电路的基本原理放大电路一般由输入端、输出端和放大器构成。
当输入信号进入放大器后,在放大器内部会产生一些微小的信号,通过放大器的放大作用,最终输出信号被放大。
在放大电路中,静态工作点是一个非常重要的概念,它代表了放大器电压的稳定状态,也就是放大器的直流工作点。
3. 静态工作点的稳定性静态工作点的稳定性对于放大电路的正常工作非常重要。
如果静态工作点不稳定,放大器的工作状态就会产生偏差,导致输出信号失真。
为了保证静态工作点的稳定,需要对放大电路进行合理的设计和参数选择。
4. 基本放大电路稳定静态工作点的原理为了稳定基本放大电路的静态工作点,可以采用负反馈的方法。
负反馈是通过将输出信号的一部分反馈到输入端,对输入信号进行调节,从而使得放大器的输出更加稳定。
通过合理选择放大器的工作点和参数,也可以有效地稳定静态工作点。
5. 个人观点和理解基本放大电路稳定静态工作点的原理其实是在工程实践中非常重要的一部分。
在电子设备中,对于信号的放大和稳定都是非常重要的需求。
通过理解和掌握基本放大电路稳定静态工作点的原理,能够更好地进行电子电路的设计和应用,为实际工程提供更多的可能性。
6. 总结通过本文的探讨,我们了解了基本放大电路稳定静态工作点的原理,包括放大电路的基本原理、静态工作点的稳定性以及稳定静态工作点的原理。
在工程应用中,我们需要通过合理的设计和参数选择来稳定放大电路的静态工作点,从而保证放大器的正常工作。
希望本文能够给您带来一些启发和帮助。
基本放大电路是电子电路中最基本的一种电路,用于放大信号。
在实际应用中,基本放大电路的稳定性是至关重要的,而稳定静态工作点则是保证放大器在正常工作状态下,输出信号能够准确地放大输入信号的重要因素。