低成本无刷直流电动机无传感器控制方法
- 格式:doc
- 大小:772.50 KB
- 文档页数:5

永磁无刷直流电动机控制方法
永磁无刷直流电动机控制方法有很多种,以下列举几种常见的方法:
1. 基于电压的控制方法:这种方法通过调节电机的驱动电源电压来控制电机的转速。
可以通过调节PWM(脉冲宽度调制)信号的占空比来控制电机的转速。
2. 基于电流的控制方法:这种方法通过控制电机的相电流来控制电机的转矩。
可以通过调节PWM信号的频率来控制电机的相电流。
3. 位置控制方法:这种方法通过检测电机的转子位置来控制电机的转速和位置。
可以使用轴编码器、霍尔传感器等装置来检测转子位置,并根据实际位置与期望位置之间的差异来调整电机的输入信号,从而实现位置控制。
4. 矢量控制方法:这种方法通过测量电机的电流和电压来实时计算出电机的控制矢量,进而控制电机的转速和转矩。
矢量控制方法可以提供更精确的转速和转矩控制,并且可以减小电机的振动和噪音。
以上仅为常见的几种控制方法,实际应用中可以根据具体需求和系统要求选择合适的控制方法。



直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正上海大学 张相军 陈伯时 朱平平上海新源变频电器有限公司 雷淮刚 摘要:针对具有梯形反电动势波形的直流无刷电机无位置传感器的控制,文章提出了一种软件实现的方法,给出了算法,并通过实验验证了这种方法的正确性和可行性。
关键词:梯形反电动势 直流无刷电机 无位置传感器控制 软件实现Zero-crossing Algorithm and Phase C orrection of BEMF in theSensorless Control of Trapezoidal BLDC MotorsZhang Xiangjun Chen Boshi Zhu Ping ping Lei Huaigang Abstract:In this paper,a softw are method an d an algorithm are put forw ard for th e sensorles s trapezoidal brus hless DC m otor.T he experimen tal results s how that the advanced m ethod is correct and feasib le.Keywords:trapez oidal BEM F br ushles s DC motor sensorless control softw are-realiz e1 引言直流无刷电机实际上是一种永磁同步电机,其转子采用永磁材料励磁,体积小、重量轻、结构简单、维护方便、运行可靠,且具有高效节能、易于控制等一系列优点,已广泛应用于办公自动化设备、计算机外围设备、仪器仪表和家用电器等领域[1]。
无位置传感器控制技术的提出,解决了传感器的难于安装和维修等一系列弊病,在小容量、轻载起动条件下,无位置传感器无刷直流电机成为一种理想的选择,并具有广阔的发展前景。

For personal use only in study and research; not for commercial use直流无刷电动机工作原理与控制方法序言由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。
一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。
其主要类型有同步电动机、异步电动机和直流电动机三种。
由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。
针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。
经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。
上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应用奠定了坚实的基础。
三相直流无刷电动机的基本组成直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
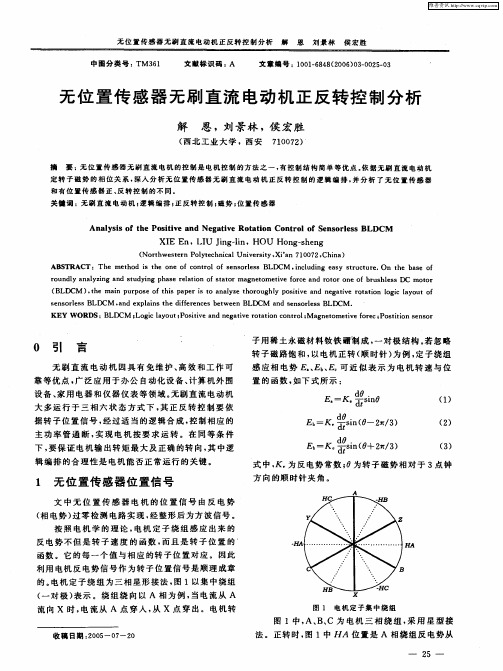
图1所示为三相两极直流无刷电机结构,图1 三相两极直流无刷电机组成三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联结。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
第8卷 第11期 中 国 水 运 Vol.8 No.11 2008年 11月 China Water Transport November 2008收稿日期:2008-09-27 作者简介:金卫良(1982-),男,杭州电子科技大学自动化学院硕士研究生在读,主要从事生产过程及自动化研究。
基于xc866的无位置传感器无刷直流电机的控制系统设计金卫良1,郑卫红2,邵根富1(1杭州电子科技大学 自动化学院,浙江 杭州 310018;2浙江科技大学 信息学院,浙江 杭州 310012)摘 要:介绍了一种基于Xc866单片机的无刷直流电动机无传感器控制方法。
采用了一种通过对三相端电压进行简单的滤波、比较后直接获得转子位置信号的检测方法,无须专门的位置检测电路或者多级模拟滤波器。
实验证明,这种方法检测精度高,抗干扰能力强,硬件检测电路简单,实现容易。
关键词:无刷直流电机;位置检测;无位置传感器中图分类号:TM33 文献标识码:A 文章编号:1006-7973(2008)11-0160-03永磁无刷直流电机具有结构简单、高效、低噪声、起动转矩大、寿命长等其他种类电机无法比拟的优点,因而得到越来越广泛的应用。
但是在关键的换向控制方面,位置传感器的存在不仅增加了电机结构的复杂性以及成本,而且降低了系统的可靠性和稳定性。
因此,如何实现无位置传感器的无刷直流电机的控制[1]成为近十几年来的一个热门课题。
本文介绍基于英飞凌xc866单片机的无位置传感器无刷直流电机的控制方案。
该方案的控制对象是基于两相导通三相六状态Y 接法的方波型无刷直流电动机[2]。
针对传统的无刷直流电机无位置传感器检测转子位置信号需要多级模拟滤波器、复杂的相移电路以及与霍尔传感器输出的信号不一致的缺陷,本文应用了一种通过对三相端电压进行简单滤波、比较后直接获得转子位置信号的新方法,测量得到的结果用来控制PWM 输出。
该系统的优点是价格低廉、结构简单、性能稳定。
无位置传感器控制技术是无刷直流电机研究的热点之一,国内外相关研究已经取得阶段性成果。
在无刷直流电机工作过程中,各相绕组轮流交替导通,绕组表现为断续通电。
在绕组不通电时,由于绕组线圈的蓄能释放,会产生感应电动势,该感应电动势的波形在绕组两端有可能被检测出来。
利用感应电动势的一些特点,可有取代转子上的位置传感器功能,来得到需要的换相信息。
由此,就出现了无位置传感器的无刷直流电动机。
尽管无位置传感器控制方式使得转子位置检测的精确度有所降低,但由于取消了位置传感器,电机的结构更加简单,安装更加方便,成本降低,可靠性进一步提高,在对体积和可靠性有要求的领域以及不适合安装位置传感器的场合,无位置传感器无刷直流电机应用广泛。
无位置传感器控制方式下的无刷直流电机具有可靠性高、抗干扰能力强等优点,同时在一定程度上克服了位置传感器安装不准确引起的换相转矩波动。
无位置传感器技术是从控制的硬件和软件两方面着手,以增加控制的复杂性换取电机结构复杂性的降低。
以采用120o电角度两两导通换相方式的三相桥式Y接无刷直流电机为例,讨论基于现代控制理论和智能算法的无刷直流电机无位置传感器控制方法。
转子位置间接检测法目前无刷直流电机中主要采用电磁式、光电式、磁敏式等多种形式的位置传感器,但位置传感器的存在限制了无刷直流电机在某些特定场合的应用,主要体现在:1、位置传感器可使电机系统的体积增大;2、位置传感器使电机与控制系统之间导线增多,使系统易受外界干扰影响;3、位置传感器在高温、高压和湿度较大等恶劣工况下运行时灵敏度变差,系统运行可靠性降低4、位置传感器对安装精度要求较高,机械安装偏差引起的换相不准确直接影响电机的运行性能。
无位置传感器控制技术越来越受到重视,并得到了迅速发展。
依据检测原理的不同,无刷直流电机无位置传感器控制方法主要包括反电势法、磁链法、电感法及人工智能法等。
反电势法反电势法(感应电动势过零点检测法)目前是技术最成熟、应用最广泛的一种位置检测方法。
低成本无刷直流电动机无传感器控制方法李浩昱张晶哈尔滨工业大学摘要:提出了以低成本的8位单片机结合可编程逻辑器件(PLD)作为无传感器无刷直流电动机控制系统核心的方法。
分析了换相控制中偏离“最佳换相逻辑”的原因,并提出了相应的软件补偿方法。
系统采用PWM闭环调速的方法,根据无刷直流电机的动态数学模型,利用MATLAB/SIMLINK对无刷电机和调速环节进行建模,通过仿真结果验证了系统闭环调速的可行性。
最后通过实验波形验证了整个控制系统的合理性。
关键词:无刷直流电动机无位置传感器控制可编程逻辑器件Control of Sensorless BLDCM at Low CostLi Haoyu Zhang JingAbstract:Based on low cost performance 8bits single-chip microcomputer and programmable logic device (PLD), the sensorless control system for brushless DC motor (BLDCM) is presented in the paper. The reasons deviating from the best comunatation logic in control are analyzed, a software method is put forward to obtain the best commutation time. The PWM Close-loop control of the speed is also introduced. The MATLAB/SIMLINK simulation and experimental results verified the reasonability and feasibility of the method.Key words:brushless DC motor(BLDCM)sensorless control programmable logic device(PLD)1 引言无刷直流电机的无传感器控制是近年来电机驱动领域关注的一项技术。
无位置传感器控制的关键在于获得可靠的转子位置信号,即从软、硬件两个方面间接获得可靠的转子位置信号来代替传统的位置传感器[1~3]。
采用无传感器控制技术的无刷电机具有结构简单、体积小、可靠性高和可维护性强等优点,使其在多个领域内得到了充分的利用[4]。
目前对于无传感器无刷电机的控制多采用单纯依靠DSP软件控制的方法[5],但是由于控制算法计算量大,执行速度较慢,且DSP 成本较高,不利于以后向市场推广。
同时也出现了应用于无传感器BLDCM控制的一些专用的集成电路[6],但由于这些芯片可扩展性和通用性较* 黑龙江省2005年科技攻关项目(GC05A315)低,而且价格昂贵,只适用于低压、小功率领域。
为了扩展无传感器BLDCM应用领域,降低其控制系统的成本,扩充控制系统的功能,增加控制系统的灵活性,本文以MCU+PLD方式组成控制系统的核心,利用PLD数字逻辑功能,分担MCU 的逻辑运算压力,使MCU和PLD的功能都得到了最大程度的发挥。
对于无位置传感器BLDCM 控制系统,本文着重分析了换相控制策略和闭环调速,最后通过仿真和实验,验证了控制系统的合理性和可行性。
2 系统的总体硬件设计本文中所设计系统是以8位PIC单片机和PLD构成的硬件平台,硬件结构框图如图1所示。
*图1 系统总体结构硬件框图功率逆变电路采用三相全桥逆变结构,电机定子绕组为Y 接法,电机工作模式为三相6状态方式。
在本文无传感器控制方式中采用反电动势过零位置检测方法,位置检测电路根据电机端电压获取3路位置信号,将信号送入PIC 单片机进行软件移相后得到3路换相信号,由可编程逻辑器件进行逻辑解码后输出6路驱动开关管的前极信号,通过驱动芯片IR2233产生驱动信号以控制各开关管的导通与关断。
该系统采用速度单闭环方式,通过改变PWM 的占空比以达到调速的目的。
本文中选用Microchip 公司的单片机PIC16F874作为控制核心,它内部有8K 的FLASH 程序存储器,368字节的数据存储器(RAM ),256字节的EEPROM 数据存储器,14个中断源,8级深度的硬件堆栈,3个定时/计数器,两个捕捉/比较/PWM (CCP )模块,10位多通道A/D 转换器等外围电路和硬件资源[6]。
这些使得运用PIC16F874在设计硬件电路时,控制电路大大简化,可靠性提高,调试更加方便。
PIC16F874单片机的B 端口的4~7口具有电平变化中断的功能,利用RB5~RB7作为反电动势的过零点检测信号的输入,如已开RB 口中断,一旦有过零点出现(发生电平的变化)就进入RB 口中断服务。
利用CCP 模块输出占空比可调的信号,可实现直流电机调速。
3 控制方法3.1 软件相移补偿由于采用脉宽调制技术进行调速,导致无刷电机端电压波形中存在一定的高频调制分量,因此在反电势检测中必须采用有源低通滤波电路以滤除高频分量,避免得到错误的过零点,但对反电动势信号产生一定的滞后,同时由于软件执行带来的延时,故从反电势检测电路输出的反电势信号比真实的反电势信号要滞后一些。
当电机的转速较高时,信号滞后所带来的负面影响就比较严重,电机表现为高速带负载能力差,并且电流增大许多倍,甚至于电机可能会突然停转[7]。
因而要对反电势信号进行补偿,以得到准确的换相信号P a ,P b ,P c 。
反电势检测输出信号滞后的电角度跟电机的转速成正比关系如下所示:arctan()arctan(2)60nRC p RC αωπ== 电机的最佳换相时刻是在反电势过零再延迟30°(电角度)。
在实际应用中合理的设计反电动势检测电路,使其相角位移在整个调速运行频率范围内不超过30°。
如图2所示,反电势过零点从m 点移到m '点,检测到反电势过零后,相位延迟角γ应调整为γ=30-α,即再延迟γ角度进行换相。
本文是通过如下方法来实现的,计算延时30°(电角度)的时间和当前转速下反电势滞后的时间,二者之差即为检测到的反电势过零点后到正确换相之间的延时时间。
由于换相偏差角α与电机的速度相关,因此调速过程中需要动态地进行补偿。
为了节省微控制器的运算时间,可预先计算出不同速度下的延时时间,存储在ROM 中,电机在运行过程中查表调用,以空间来换取时间,提高了系统的实时性。
图2 反电动势相位延迟π3.2 逻辑换相换相逻辑完全可由PIC单片机来完成,但是由于单片机是按串行方式工作,指令在时序上是逐条执行的,在实际系统的运行过程中,恶劣的工作环境很容易使系统死机或程序飞逸。
因此本文利用PLD器件的强大的数字逻辑功能来完成逻辑换相,不仅分担了PIC的逻辑运算压力,同时提高了系统的稳定性和可靠性,简化了控制系统的外围设置。
PLD实现逻辑解码的第一步是根据单片机输出换相信号P a,P b和P c(如表3)和正反转信号判断开关管的工作顺序(G1,G3,G5为上桥臂开关管,G2,G4,G6为下桥臂开关管)。
再根据换相信号将PIC单片机发出的PWM信号提供给处于工作状态的开关管作为其导通信号。
表3 换相信号和开关管工作顺序4 系统的闭环调速及仿真4.1 调速策略由于无刷直流电动机具有普通有刷直流电动机的机械性能,所以通常采用PWM调压调速的方法。
其方法是单片机CPU根据采集速度给定值和速度反馈实际值,计算得出的速度误差控制量,经过数字PID调节来控制输出PWM信号的占空比,送入逻辑综合分配单元,控制三相桥式逆变器。
通过调节转速给定值,单片机内部调节PWM 的占空比,也就调节了加在电机上的脉冲电压,从而实现了电机转速的无极平滑调速。
为了实现速度无静差控制,速度闭环采用PI控制器,其中比例环节可以使电机转速快速跟随给定转速,积分环节可有效实现速度的无静差精确控制,且稳定高。
电机速度采用软件T法测速,单片机可自动地捕获到位置信号的两个上升沿,可通过计算得出两个上升沿间隔的时间T,及在T内计得的时钟脉冲Φ的个数m,则通过f=1/T=1/mΦ,即可求出电机的转速。
外部转速的给定通过外部电位器,调节电位器可以得到一个0~5 V连续变化的标准电压信号,将该信号送入单片机的AD转换口,转换位10位的二进制数字量。
4.2 调速系统的仿真分析以具有梯形反电动势波形的三相直流无刷电机建立数学动态模型,系统工作在二二导通、三相6拍的工作方式。
BLDCM相电压、电流、中性点电压方程分别为x x x nU Ri e Udt=+,,x a b c=a b ci i i++=33a b c a b cnU U U e e eU++++=-式中:xU为各相对地电压,V;xi为绕组各相电流,A;xe为各相反电动势,V;nU为中性点对地电压,V;R为绕组各相电阻,Ω;L为各相绕组自感,H;M为各相绕组间的互感,H。
电磁转矩和转子运动方程分别为a b ce a b ce e eT i i iωωω=++e ldT T B Jdtωω--=式中:eT为电机的电磁转矩;ω为电机转子电角频率;lT为负载转矩;J为转动惯量;B为阻尼系数。
根据无刷直流电机的数学动态模型建立无刷直流电机与调速环节的MATLAB/SIMKINK的仿真模型,总体设计如图3所示,其中子系统1~4分别为中性点对地电压计算模块、梯形反电动势模块、PWM调制模块和换相逻辑模块。
针对额定电压为150 V,给定转速为1000 r/min,定子绕组为0.5 Ω,自感为0.65 mH,互感为1.44 mH,极对数为1的电机进行仿真,在0.5 s,1.5 s时系统给定转速突变为1200 r/min,800 r/min,得到的转子转速、绕组相电压、电流波形如图4所示。
从仿真结果来看,与理论分析基本一致,在给定转速发生变化的情况下具有很强的跟踪能力,且具有较好的动态、静态响应。
5 试验结果与结论针对额定电压为150V,额定转速为4000 r/min的电机进行试验,图5,6分别为电机工作d t图3 直流无刷电机SIMLINK仿真模型图4 转子转速变化曲线和PWM 调速相电压、电流波形在1000 r/min时的相电压和电流波形。
通过实验验证了所设计的控制系统的合理性和可行性。
图5 绕组相电压波形图6 绕组相电流波形本文提出了以PIC+PLD为控制的核心的设计方案,充分利用了PIC单片机的丰富的片内资源,高效的运算处理能力及便捷的PWM功能,同时结合PLD强大的数字逻辑功能来实现对无位置传感器BLDCM控制,保证了控制的实时性,有效的简化了硬件设计,使系统得结构更加简洁、紧凑。