有槽无刷直流电动机设计流程要点
- 格式:doc
- 大小:1.52 MB
- 文档页数:16
无刷直流电机设计流程嘿,朋友!今天咱就来唠唠无刷直流电机设计这档子事儿。
这无刷直流电机啊,就像是一个神奇的小宇宙,里面藏着好多学问呢。
要开始设计无刷直流电机,第一步就得明确它的用途。
这就好比你要盖房子,得先知道这房子是用来住人啊,还是做仓库。
我有个朋友叫小李,他想设计一个用于小型无人机的无刷直流电机。
那他就得考虑这个电机要足够轻便,动力还得强劲,能让无人机飞得又稳又快。
这时候就像是给这个电机定了个大方向,就像航海的时候有了指南针一样。
接下来就是确定电机的主要参数啦。
这里面的门道可不少呢。
比如说额定功率、额定转速、转矩这些。
这额定功率啊,就像是一个人的力气大小。
要是功率定小了,就像让一个小孩去干大人的活,根本带不动嘛!而转速就好比一个人跑步的速度,转矩呢,有点像一个人能使出来的爆发力。
我曾经见过一个新手在设计无刷直流电机时,乱定参数,结果电机造出来,那性能差得呀,就像一辆破自行车,怎么骑都费劲。
选磁钢材料也是很关键的一步。
这磁钢材料就像是电机的灵魂所在。
不同的磁钢材料性能差别可大了去了。
有铁氧体磁钢,还有稀土永磁材料呢。
稀土永磁材料虽然贵一些,但是它的性能就像超级英雄一样厉害。
我跟同行老张讨论的时候,他就说:“这稀土永磁材料就像魔法材料一样,能让电机的性能一下子提升好几个档次,不过成本就像个拦路虎啊。
”这时候就得在性能和成本之间权衡,就像走钢丝一样,得小心翼翼。
然后就是绕组的设计啦。
绕组就像是电机的经脉一样。
绕组的匝数、线径这些都很重要。
匝数多了,就像给电机穿上了厚厚的衣服,电阻增大,电流就不好通过了。
匝数少了呢,又像是衣服穿得太薄,性能也会受影响。
这时候就得像裁缝一样,精心剪裁,找到最合适的匝数和线径。
我在学习绕组设计的时候,可没少向老师傅请教。
老师傅就说:“这绕组设计啊,就像绣花,一针一线都得恰到好处。
”转子和定子的设计也不能马虎。
转子就像电机的心脏,定子就像它的外壳。
转子的结构形状会影响电机的转动惯量。
无刷直流永磁电动机设计流程和实例无刷直流永磁电动机设计实例一. 主要技术指标1. 额定功率:W 30P N =2. 额定电压:V U N 48=,直流3. 额定电流:A I N 1<3. 额定转速:m in /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m 065.0036.0?φ二.主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P '直流电动机 W P K P NNm i 48.4063.03085.0'=?==η,按陈世坤书。
长期运行 N i P P ?''+='ηη321 短期运行 N i P P ?''+='ηη431 3.预取线负荷m A A s /11000'= 4.预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6.预取长径比(L/D )λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-?==''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=111. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-?12. 极距 m p D i 221102.22104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?==三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22110733.06104.114.3--?=??==π3. 槽形选择梯形口扇形槽,见下图。
自制无刷电机教程
无刷电机是一种常见的电动机,其具有高效能、长寿命和低噪音等优点。
下面是一份制作自制无刷电机的简化教程,仅供参考。
材料:
1. 铁芯
2. 电线
3. 磁铁
4. D型磁环
5. 电动机座
6. 线圈
步骤:
1. 将铁芯剪成合适的长度,一端固定在电动机座上。
2. 将磁铁固定在铁芯的另一端。
确保磁铁与铁芯的位置正确,以获得较好的磁场。
3. 在铁芯上绕线圈,并将线圈的两端与电线连接。
确保线圈绕得整齐且牢固。
4. 将D型磁环安装在线圈的一端,使其与铁芯和磁铁之间形成空隙。
这将利用磁场的变化产生电流。
5. 将整个组件装配在电动机座上,确保一切连接牢固。
使用:
1. 连接电动机的电源。
2. 转动电动机,以产生磁场。
3. 通过电源发送电流至线圈,产生磁势力,驱动电动机旋转。
注意事项:
1. 在制作无刷电机时要小心,避免触电或其他不安全因素。
2. 当连接电源时,确保电压和电流适合电动机的要求,以避免损坏电动机或其他设备。
3. 在整个制作过程中,确保各个部件的紧固和连接牢固,以保证无刷电机的正常运行。
总结:
制作自制无刷电机需要一些基本的零件和工具,但并不复杂。
通过遵循上述步骤,您可以制作出一个简单的无刷电机,并用于一些小型的实验或业余科技项目。
但请注意,这仅仅是一个简化的教程,实际制作无刷电机的复杂度取决于所需的性能和用途。
如果您需要一个更高性能的无刷电机,建议购买专业的无刷电机产品。
无刷直流电机制作方法
无刷直流电机是一种高效、低噪音、长寿命的电机,广泛应用于各种领域,如家电、汽车、机器人等。
本文将介绍无刷直流电机的制作方法。
我们需要准备以下材料和工具:
1. 无刷直流电机的转子和定子
2. 电机驱动器
3. 电池或电源
4. 电线
5. 焊接工具
6. 螺丝刀
7. 手电钻
接下来,我们按照以下步骤进行制作:
1. 将无刷直流电机的转子和定子组装在一起,并用螺丝固定。
2. 将电机驱动器连接到电机的三个引脚上,注意连接的顺序。
3. 将电池或电源连接到电机驱动器上,以提供电源。
4. 使用电线将电机驱动器和电池或电源连接起来。
5. 使用焊接工具将电线焊接到电机驱动器和电池或电源上。
6. 使用手电钻将电机的轴承孔扩大,以适应电机轴的直径。
7. 将电机轴插入轴承孔中,并用螺丝固定。
8. 测试电机是否正常工作,如果有问题,可以检查电线连接是否正确或更换电机驱动器。
以上就是无刷直流电机的制作方法。
需要注意的是,在制作过程中要注意安全,避免触电或其他意外事故的发生。
此外,制作无刷直流电机需要一定的电子知识和技能,如果您不熟悉电子方面的知识,建议寻求专业人士的帮助。
轴向磁通直流无刷电机设计流程英文回答:Designing a axial flux permanent magnet brushless DC motor involves several steps and considerations. Here is a general process that can be followed:1. Determine the specifications: Start by defining the requirements for the motor, such as the desired power output, torque, speed, and voltage. Consider theapplication and any specific constraints or limitations.2. Select the motor topology: There are different axial flux motor topologies available, such as the single-sided or double-sided rotor, iron-core or ironless stator, and different winding configurations. Choose the appropriate topology based on the requirements and constraints.3. Magnetic design: Determine the number of poles and the magnet configuration based on the desired torque andspeed. Calculate the required magnetic flux density and select suitable permanent magnets. Design the rotor and stator cores to ensure efficient magnetic flux paths.4. Electrical design: Determine the winding configuration and calculate the number of turns per coil. Select the appropriate wire size and insulation material. Design the stator and rotor windings to achieve the desired performance characteristics.5. Mechanical design: Design the motor housing, shaft, and bearings to ensure proper alignment and support. Consider factors such as thermal management, vibration, and noise.6. Control and drive system: Design the motor control and drive system to provide the necessary current and voltage to the motor. Consider the control algorithm, feedback sensors, and protection mechanisms.7. Prototype and testing: Build a prototype of the motor and test it under various operating conditions.Measure the performance characteristics and compare them to the design specifications. Make any necessary adjustments or improvements.8. Optimization: Fine-tune the motor design based on the test results and feedback. Optimize the magnetic and electrical designs to improve efficiency, reduce losses, and enhance overall performance.9. Manufacturing and production: Once the design is finalized, prepare the necessary documentation and specifications for manufacturing. Select suitable suppliers for the components and materials. Establish quality control processes to ensure consistent production.中文回答:设计轴向磁通直流无刷电机涉及多个步骤和考虑因素。
无刷直流电机设计与性能分析随着电动汽车的普及和工业自动化的发展,无刷直流电机作为一种高效、精准、可控性强的电机,越来越受到工程师和研究人员的关注。
本文将探讨无刷直流电机的设计原理、性能分析以及相关应用。
一、无刷直流电机的设计原理无刷直流电机是一种利用反电动势将电能转化为机械能的装置。
与传统的直流电机相比,无刷直流电机不需要传统的碳刷和电刷组,可以减少能耗和机械磨损。
其主要部件包括定子、转子和电子调速器。
定子是无刷直流电机的固定部分,由若干个电磁铁组成。
转子则由磁铁和导电线圈构成。
电子调速器是控制整个电机的核心部件,负责接收和处理信号,并驱动转子旋转。
在无刷直流电机的工作过程中,电流通过定子的电磁铁,产生磁场。
电子调速器根据传感器返回的信号,控制定子电磁铁的通电状态,从而产生电磁力。
这个电磁力作用在转子的磁铁上,使转子旋转。
转子的旋转又会产生反电动势,通过电子调速器的处理,控制整个系统的转速和转向。
二、无刷直流电机的性能分析无刷直流电机的性能主要包括转速、转矩和效率。
1. 转速:无刷直流电机的转速取决于电子调速器的驱动信号和负载情况。
通常情况下,当负载较小时,转速较高。
而随着负载的增加,转速会逐渐降低。
2. 转矩:转矩是电机转动时产生的力矩。
无刷直流电机的输出转矩与电流成正比。
当电流增大时,输出转矩也会随之增大。
同时,转矩还受到电机的结构设计和磁铁材料的影响。
3. 效率:无刷直流电机的效率通常指电机的转动效率,即将输入的电能转化为机械功的比例。
高效率的无刷直流电机可以减少能源消耗和热量产生。
三、无刷直流电机的应用无刷直流电机在许多领域具有广泛的应用。
以下是几个典型的应用案例:1. 电动汽车:无刷直流电机作为电动汽车的动力源,具有高效率、低噪音和快速响应的特点。
它可以驱动汽车前进、制动和转向,成为电动汽车领域的关键技术。
2. 工业自动化:无刷直流电机作为工业自动化装置的驱动装置,广泛应用于机器人、传送带、工业机床等设备中。
无刷直流电动机的设计无刷直流电动机(BLDC)是一种基于电子换向器和磁传感器的新型电机,具有高效率、高功率密度、高可靠性、无摩擦等优点,广泛应用于工业、农业、家电和汽车等领域。
本文将介绍无刷直流电动机的设计原理、设计流程和一些关键技术。
一、设计原理无刷直流电动机的工作原理是利用永磁体和电流产生的磁场相互作用,从而产生转矩。
它的转子由一个或多个永磁体组成,通过电流换向器控制电流的方向,从而实现转子的旋转。
无刷直流电动机通常采用三相设计,每相之间的换向角为120度。
二、设计流程1.确定电机的额定功率和转速。
根据设计要求,确定电机的额定功率和转速。
这些参数将决定电机的尺寸、材料和冷却方式等。
2.选择永磁材料和磁路设计。
根据电机的运行环境和功率需求,选择合适的永磁材料。
同时,设计磁路以确保磁通密度的均匀分布和最小的磁路损耗。
3.设计定子绕组和绝缘系统。
根据电机的功率和电压要求,设计定子绕组。
同时,设计合适的绝缘系统以确保电机的安全性和可靠性。
4.确定电流换向器的拓扑和控制策略。
选择合适的电流换向器拓扑(如半桥、全桥等)以及控制策略(如PWM控制、电流环控制等),以实现电机的换向操作。
5.进行磁场分析和电磁设计。
通过磁场分析软件,进行电磁设计。
通过磁场分析,可以得到电机的特性曲线、转矩和功率密度等指标。
6.进行结构设计和热分析。
根据电机的尺寸和电机的工作环境,进行结构设计和热分析。
结构设计要考虑机械强度、制造成本等因素,热分析要考虑散热方式和绝缘系统。
7.制造和测试。
根据设计图纸进行电机的制造。
制造完成后,进行测试,通过测试结果对电机的设计进行修正和优化。
三、关键技术1.电磁设计技术。
电磁设计是无刷直流电动机设计的核心技术,它涉及到永磁体选材、磁路参数计算、磁场分析等方面。
2.电流换向器设计技术。
电流换向器是控制无刷直流电动机运行的关键部件,它的设计直接影响到电机的性能。
目前常用的换向器有半桥、全桥等拓扑,选择合适的拓扑和控制策略对电机的效率和稳定性有重要影响。
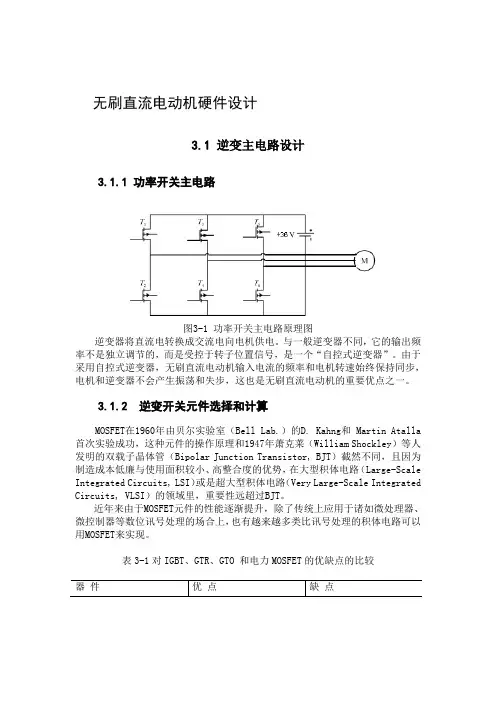
无刷直流电动机硬件设计3.1 逆变主电路设计3.1.1 功率开关主电路图3-1 功率开关主电路原理图逆变器将直流电转换成交流电向电机供电。
与一般逆变器不同,它的输出频率不是独立调节的,而是受控于转子位置信号,是一个“自控式逆变器”。
由于采用自控式逆变器,无刷直流电动机输入电流的频率和电机转速始终保持同步,电机和逆变器不会产生振荡和失步,这也是无刷直流电动机的重要优点之一。
3.1.2 逆变开关元件选择和计算MOSFET在1960年由贝尔实验室(Bell Lab.)的D. Kahng和 Martin Atalla 首次实验成功,这种元件的操作原理和1947年萧克莱(William Shockley)等人发明的双载子晶体管(Bipolar Junction Transistor, BJT)截然不同,且因为制造成本低廉与使用面积较小、高整合度的优势,在大型积体电路(Large-Scale Integrated Circuits, LSI)或是超大型积体电路(Very Large-Scale Integrated Circuits, VLSI)的领域里,重要性远超过BJT。
近年来由于MOSFET元件的性能逐渐提升,除了传统上应用于诸如微处理器、微控制器等数位讯号处理的场合上,也有越来越多类比讯号处理的积体电路可以用MOSFET来实现。
表3-1对IGBT、GTR、GTO 和电力MOSFET的优缺点的比较器件优点缺点IGBT 开关速度高,开关损耗小,具有耐脉冲电流冲击的能力,通态压降较低,输入阻抗高,为电压驱动,驱动功率小开关速度低于电力MOSFET,电压,电流容量不及GTOGTR 耐压高,电流大,开关特性好,通流能力强,饱和压降低 开关速度低,为电流驱动,所需驱动功率大,驱动电路复杂,存在二次击穿问题GTO电压、电流容量大,适用于大功率场合,具有电导调制效应,其通流能力很强 电流关断增益很小,关断时门极负脉冲电流大,开关速度低,驱动功率大,驱动电路复杂,开关频率低电 力 MOSFET 开关速度快,输入阻抗高,热稳定性好,所需驱动功率小且驱动电路简单,工作频率高,不存在二次击穿问题电流容量小,耐压低,一般只适用于功率不超过10kW 的电力电子装置通过上述的比较,我选择MOSFET 。
无刷电机的制作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!无刷电机的制作流程一、准备工作阶段。
在着手制作无刷电机之前,需要进行充分的准备。
无刷直流永磁电动机的原理和设计无刷直流永磁电动机是一种将电能转化为机械能的装置,它采用了无刷技术和永磁材料,具有高效率、高功率密度和可靠性高等优点。
本文将详细介绍无刷直流永磁电动机的工作原理和设计要点。
无刷直流永磁电动机的工作原理主要包括电磁场产生、电流调节和转矩产生三个方面。
首先,通过电流调节器向无刷直流永磁电动机的定子绕组输入电流,产生定子磁场。
接着,通过永磁体在转子上产生磁场,与定子磁场相互作用,产生转子磁场。
最后,通过转子磁场和定子绕组之间的相互作用,产生电磁转矩,驱动转子旋转。
设计无刷直流永磁电动机时,需要考虑多个因素。
首先是功率需求,根据所需的功率大小选择合适的电机型号和规格。
其次是电压和电流需求,根据电源的电压和电流限制选择合适的电机参数。
还需要考虑转速范围和转矩要求,根据具体应用场景确定电机的转速和转矩特性。
此外,还需要考虑电机的体积、重量和成本等因素。
在无刷直流永磁电动机的设计中,关键的技术是永磁材料的选择和磁路设计。
永磁材料的选择要考虑其磁能积、矫顽力、矫顽力系数等参数,以及温度稳定性和成本等因素。
磁路设计要保证磁场的均匀性和稳定性,提高电机的效率和输出功率。
无刷直流永磁电动机还需要配备电流调节器和位置传感器等辅助设备。
电流调节器可以实现对电机电流的精确控制,保证电机的稳定运行。
位置传感器可以实时监测电机转子的位置和转速,提供给电流调节器进行反馈控制。
无刷直流永磁电动机具有多种应用领域。
在工业领域,它广泛应用于机床、印刷设备、纺织设备等需要精确控制的设备中。
在交通领域,它被用作电动汽车的驱动系统,具有高效率和长续航里程的优势。
在家电领域,它被应用于洗衣机、冰箱等家电产品中,提供高效、静音的驱动能力。
无刷直流永磁电动机是一种高效、高功率密度和可靠性高的电机,具有广泛的应用前景。
在设计无刷直流永磁电动机时,需要考虑功率需求、电压和电流需求、转速范围和转矩要求等因素。
通过合理选择永磁材料和进行优化的磁路设计,可以提高电机的效率和输出功率。
无刷电机工艺流程
无刷电机工艺流程
无刷电机工艺流程
无刷电机工艺流程,即无刷电机的制造流程,是指将无刷电机的各种零部件组装成最终的产品的一系列工艺步骤。
通常包括以下几个环节:
1.设计和研发:无刷电机的设计和研发是整个工艺流程的核心环节。
设计人员需要根据产品的需求和市场需求,确定电机的参数和特性,并进行电子电路设计和机械结构设计。
2.制造零部件:无刷电机的零部件主要包括转子、定子、轴承、端盖、机壳等。
这些零部件需要经过铸造、加工、打磨等工艺制造出来。
3.组装:经过制造的零部件,需要进行组装。
组装过程包括转子和定子的组装、轴承的安装、端盖和机壳的装配等。
4.调试:组装完成后,需要进行电机的调试和测试,确保电机的参数和特性达到设计要求,并排除可能存在的故障。
5.包装和出货:完成调试后,无刷电机需要进行包装和出货,以便运输和销售。
无刷电机工艺流程需要高度的技术实力和工艺经验,以确保无刷电机的质量和性能。
随着科技的不断发展,无刷电机的工艺流程也在不断改进和完善,以适应市场的需求和发展趋势。
- 1 -。
电机与拖动基础课程设计报告设计题目:学号:指导教师:信息与电气工程学院二零一六年七月直流无刷电机本体设计1. 设计任务(1) 额定功率80N P W = (2) 额定电压310N U V ≤(3) 电动机运行时额定转速1000/min N n r = (4) 发电机运行时空载转速max 6000/minn r = (5) 最大允许过载倍数 2.5λ=(6) 耐冲击能力21500/m a m s =(7) 机壳外径42D mm ≤设计内容:1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。
2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。
3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。
2. 理论与计算过程2.1 直流无刷电机的基本组成环节直流无刷电动机的结构原理如图2-1-1所示。
它主要由电机本体、位置传感器和电子开关线路三部分组成。
电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。
图中的电机本体为三相电机。
三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。
其原理框图如图2-1-2所示。
图2-1-1 直流电动机的工作原理图图2-1-2 直流无刷电机的原理框图 电机转子的永久磁钢与永磁有刷电机中所使用的永久磁钢的作用相似,均是在电机的气隙中建立足够的磁场,其不同之处在于直流无刷电机中永久磁钢装在转子上,而直流有刷电机的磁钢装在定子上,图2-1-3示出了典型直流无刷电机本体基本结构图。
无感无刷直流电机之电调设计全攻略前 言 (1)1. 无刷直流电机基础知识 (2)1.1 三个基本定则 (2)1. 左手定则 (2)2. 右手定则(安培定则一) (3)3. 右手螺旋定则(安培定则二) (3)1.2 内转子无刷直流电机的工作原理 (3)1. 磁回路分析法 (4)2. 三相二极内转子电机结构 (5)3. 三相多绕组多极内转子电机的结构 (7)1.3外转子无刷直流电机的工作原理 (8)1. 一般外转子无刷直流电机的结构 (8)2. 新西达2212外转子电机的结构 (8)1.4 无刷直流电机转矩的理论分析 (14)1. 传统的无刷电机绕组结构 (14)2. 转子磁场的分布情况 (15)3. 转子的受力分析 (16)4. 一种近似分析模型 (18)1.5 换相与调速 (19)1. 换相基本原理 (19)2. 新西达2212电机的换相分析 (24)3. 调速 (28)2. 无感无刷电调的驱动电路设计 (30)2.1 电池电压监测电路 (30)2.2 换相控制电路 (30)1. 六臂全桥驱动电路原理 (31)2. 功率场效应管的选择 (33)2.3 电流检测电路 (45)2.4 反电势过零检测电路 (49)2.5 制作你自己的电调线路板 (50)3. 无感无刷电调的软件设计 (52)3.1 电流检测 (52)3.2 定时器延时与PWM信号 (53)1. 定时器初始化 (54)2. 定时器T0的溢出中断服务程序 (54)3. 利用T0延时(毫秒极) (54)4. 利用T0延时(微秒极) (55)5. PWM信号的产生 (55)3.3 过零事件检测与电机换相 (56)1. BLMC.h中定义的宏 (56)2. 过零检测与换相代码分析 (59)3.4 启动算法 (63)1. 函数Anwerfen启动流程分析 (63)2. 启动算法机理探究 (65)3.5 上电时的MOSFET自检 (68)1. 函数Delay和DelayM (68)2. 函数MotorTon自检流程分析 (68)3.6 让你的电机演奏音乐 (70)3.7 通信模块 (72)1. PPM解码 (72)2. TWI总线通信 (74)3. 串口通信 (74)4. 指令的收入函数SollwertErmittlung (75)4. 德国MicroKopter项目BL-Ctrl电调程序主程序代码流程分析(V0.41版本) (77)5.1 全局变量列表 (78)5.2 main主函数流程分析 (80)1. 进入while(1)前的准备工作 (80)2. while(1)主循环内容分析 (81)5. 高级话题 (86)5.1 电机的控制模型 (86)5.2 四轴上的校正策略 (87)附录一 (88)附录二 (89)附录三 (93)附录四 (94)前 言关注开源四轴项目也有近一年了,前期都以潜水为主,业余时间主要是在啃那些控制和导航的理论书籍。
无刷直流电动机的设计摘要【摘要】无刷直流电动机是近年迅速兴起的一种新型电机,它广泛应用与工业,农业,以及军事等领域。
无刷直流电动机既保持了直流电动机良好的调速控制特性,又消除了电刷和换向器的机械接触。
本文是对无刷直流电动机做出深入的剖析与设计。
无刷直流电动机是一种具有高效率、低磨损、低噪声的新型直流电机机种.本设计在介绍无刷直流电动机设计中,关于相数、极数、槽数及绕组连接方式的选择方法和应遵从的规律.而且针对小功率直流电动机结构特点和工作性能,在电枢反应理论基础上设计出功率为120w的无刷直流电动机,并对霍尔位置传感器和无刷电动机的控制及驱动做了详细的分析。
【关键词】设计无刷直流电动机霍尔位置传感器Design of Brushless DC motor【Abstract】Brushless DC motor is rapidly development new motor in the recently, and it widely used in industry、agriculture and in the army. The better governing speed characteristic is kept and the mechanical touch between brushes and commutator is removed as well in brushless DC Motors.This paper intends to make a better on the Design of Brushless DC motor .The DC motor without coal brushless is in a new style, with higher work rate. Less wear and lower noise. This paper presents the method of selecting phase, slot number and winding connection type and introduces the laws that should be obey in the design of brushless DC motor. Also based on introducing the structure of a light power DC motor, a 120w light power DC motor is design according to the theory. Not only make a lot of analyzed about the Hall position sensor in this paper .but also the brushless DC’s controls and the driving-methods for brushless DC.【Key words】design brushless DC motor Hall position sensor前言无刷直流电动机是近年来随着电子技术的迅速发展而发展起来的一种新型直流电动机,它是现代工业设备、现代科学技术和军事装备中重要的机电元件之一。
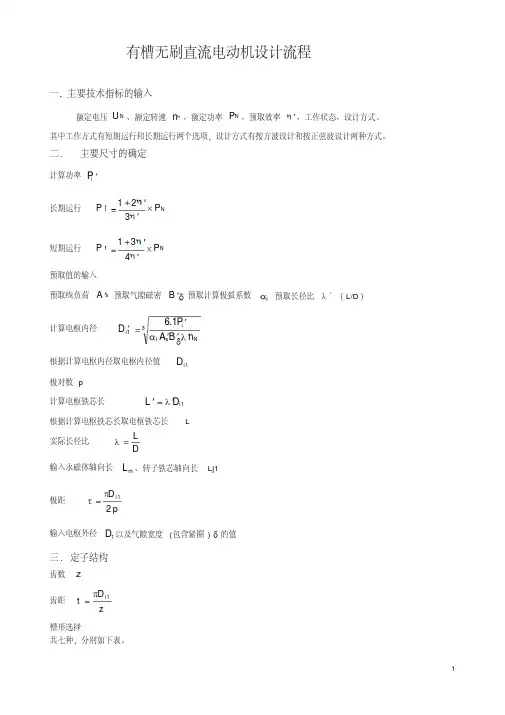
有槽无刷直流电动机设计流程一. 主要技术指标的输入额定电压N U 、额定转速N n 、额定功率N P 、预取效率η'、工作状态、设计方式。
其中工作方式有短期运行和长期运行两个选项,设计方式有按方波设计和按正弦波设计两种方式。
二. 主要尺寸的确定计算功率i P ' 长期运行 N i P P ⨯''+='ηη321 短期运行 N i P P ⨯''+='ηη431 预取值的输入预取线负荷s A ' 预取气隙磁密δB ' 预取计算极弧系数i α 预取长径比λ′(L/D ) 计算电枢内径 311.6N si i i n B A P D λαδ''''='根据计算电枢内径取电枢内径值1i D 极对数p计算电枢铁芯长 1i D L λ'=' 根据计算电枢铁芯长取电枢铁芯长L 实际长径比 DL =λ 输入永磁体轴向长m L 、转子铁芯轴向长Lj1 极距 pD i 21πτ=输入电枢外径1D 以及气隙宽度(包含紧圈)δ的值三.定子结构齿数 Z 齿距 zD t i 1π=槽形选择共七种,分别如下表。
预估齿宽: Fet t K B tB b δ=(t B 可由设计者经验得)预估轭高: 11122j Fe i Fe j j B K B a K lB h δδτ≈Φ= (1j B 可由设计者经验得) 齿高t h 电枢轭高t i j h D D h --=2111 气隙系数 2010101)5()5(b b t b t K -++=δδδ电枢铁心轭部沿磁路计算长度 1111)21(2)2(j ij t i i h ph h D L +-⨯++=απ电枢铁芯材料确定(从数据库中读取) 电枢冲片材料 电枢冲片叠片系数1Fe K 电枢冲片材料密度1j ρ 电枢冲片比损耗)50/10(s p 电枢铁损工艺系数a K 开口梯形槽1 开口口半梨形槽2图 形结 参 构 数 槽口宽01b 槽口深01h 槽肩宽1x b 槽肩深1x h 槽底宽1d b 槽身深1s h 槽口宽01b 槽口深01h 槽肩圆弧直径1x b 槽底宽1d b 槽 深1s h净211118sin 2x s x d s b a a h b b S +-+⨯+=π面槽积101111122xxsxdshbbhbbS⨯++⨯+=101arcsin2xbba=平均齿宽1101112/sxihhhDR+++=101122/xihhDR++=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=(1tb、2tb为最大齿宽或最小齿宽,视大小而定。
tb为平均齿宽,取离最小齿宽1/3处的齿宽,以下表示均与此相同)开口梨形槽31101112/2/sxihbhDR+++=2/2/10112xibhDR++=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=开口圆形槽4图形结构参数槽口宽01b槽口深01h槽肩圆弧直径1xb槽底圆弧直径1db槽深1sh槽口宽01b槽口深01h槽直径1db净槽面积21211118sin82xdsdxSbaabhbbS+-++⨯+=ππ101arcsin2xbba=21218sin8ddSbaabS+-+=ππ101arcsin2dbba=平均齿宽2/2/10112xibhDR++=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=开口底半梨形槽501122/hDRi+=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=梨形口扇形槽6图形参数槽口宽01b槽口深01h槽肩宽1xb槽肩深1xh槽底圆弧直径1db槽深1sh槽口宽01b槽口深01h槽肩圆弧直径1xb槽底宽1db槽深1sh净槽面积2101121111282xxdsdxShbbbhbbS+++⨯+=π110112sxi hhhDR+++=101arcsin2xbba=Rbd2arcsin21=β2122⎪⎭⎫⎝⎛-=dbRh hRhgs+-=1212122111221218sin2⎪⎭⎫⎝⎛--++-+⨯+=ddxxdsbRbRbaagbbSβπ平均齿宽101122/xihhDR++=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=101122/xihhDR++=)]2arcsin(sin[21111RbZRb dt-=π)]2arcsin(sin[22122RbZRb xt-=π若21ttbb>,则3212ttttbbbb-+=否则:3121ttttbbbb-+=梯形口扇形槽7图形结构参数槽口宽01b槽口深01h槽肩宽1xb槽肩深1xh槽底宽1db槽身深1sh净槽面积110112sxi hhhDR+++=2122⎪⎭⎫⎝⎛-=dbRhRbd2arcsin21=βhRhgs+-=1212121011112212122⎪⎭⎫⎝⎛--+⨯++⨯+=ddxxxdsbRbRhbbgbbSβ平 均 齿 宽1101112/s x i h h h D R +++= 101122/x i h h D R ++=)]2arcsin(sin[21111R b Z R b d t -=π )]2arcsin(sin[22122R b Z R b x t -=π若21t t b b >,则3212t t t t b b b b -+= 否则: 3121t t t t b b b b -+=四.转子结构转子结构类型:瓦片磁钢径向冲磁 环形磁钢 切向冲磁式磁钢1.转子结构:永磁体磁化方向厚度m H 永磁体内、外极弧系数mi α me α永磁体外径δ21-=i m D D 永磁体内径m m m i H D D 2-= 转子轭外径mi e D D =2 转子轭内径2i D 紧圈外经D22.永磁材料的选取(从数据库)材料名 剩磁20r B 矫顽力20c H 永磁体材料密度m ρ 可逆温度系数Br α3.转子轭材料选择材料名 密度2j ρ4.轴材料选择材料名 密度b ρ5.电机工作温度t6.磁钢在工作温度下的剩磁 20100)20(1r Br r B t B ⎥⎦⎤⎢⎣⎡--=α(Br α为r B 的可逆温度系数, r B 有负的温度系数,本公式中Br α为正值)。
7.磁钢在工作温度下的矫顽力 20100)20(1c Hc c H t H ⎥⎦⎤⎢⎣⎡--=α (Hc α为Hc 的可逆温度系数,Hc 有负的可逆温度系数,本公式中为正值)。
8.转子磁轭等效宽度 2222i e j D D b -=9.转子磁轭沿磁路方向长度)21(4)(2222mii e j j pD D b L απ-++=[瓦片]10.磁体磁化方向截面积 pD D L S mi m m me mi m 8)()(++=παα [瓦片]五、磁路计算磁钢剩磁对应的磁通m r r S B =Φ 对应的磁势m c c H H F *0.2= 预取漏磁系数σ空载及负载磁路特性计算 空载气隙磁密δB空载气隙磁通L B m ταδδ=Φ 空载电枢齿磁密Fet t K b tB B δ=空载电枢轭磁密L K h B Fe j j 112δΦ=空载转子轭磁密Lb B j j 222σδΦ=电枢齿磁场强度(从数据库查表) 电枢轭磁场强度(从数据库查表) 转子轭磁场强度(从数据库查表)气隙磁势6106.1⨯=δδδδB K F 齿磁势t t t h H F 2=转子轭部磁势222j j j L H F = 定子轭部磁势111j j j L H F = 总磁势∑+++=21j j tF FF F F δ总磁通δσΦ=Φm 负载时总磁势admLFF F +=∑∑ 起动时总磁势sdmLFF F +=∑∑采用迭代算法计算空载曲线与去磁曲线的交点,可得出电机的空载工作点(求空载和负载工作点算法详见《求取空载负载工作点》文档)。
六.电路计算绕组形式:星形三相三状态 b )星形三相六状态 状态导通相数(对a 为一相,对b 为二相) 磁状态角(对a 为120度,对b 为60度) 导通角(120度) 每极每相槽数m pz q 2=槽距电角度Zp πα21=以槽数表示的极距pZ 20=τ 分布系数)5.0sin()5.0sin(11a q a q K d ⨯⨯⨯⨯=以槽数表示的节距Y1 短距系数015.0sinτπY K p =绕组系数 p d W K K K ⨯= 并联支路数a 管压降U ∆预取空载转速0n ' 每相绕组串联匝数φW 'a .按方波设计025.7δφαΦ'∆-='pn UU W i(星形三相六状态) 0015δφαΦ'∆-='pn UU W i(星形三相三状态) b .按正弦波设计02785.5δφΦ'∆-='W K pn UU W (星形三相六状态)055.11δφΦ'∆-='W K pn UU W (星形三相三状态)根据φW '取每相绕组串联匝数φW 实际空载转速0n a .按方波设计025.7δφαΦ∆-=pW UU n i(星形三相六状态)015δφαΦ∆-=pW UU n i(星形三相三状态)b .按正弦波设计02785.5δφΦ∆-=W K pW UU n (星形三相六状态)055.11δφΦ∆-=W K pW UU n (星形三相三状态)层数(单层或双层)C 电枢绕组总元件数2CZW c =实际总导体数a mW N φ2= 计算绕组每元件匝数cs W NW 2= 实际每槽导体数Ns=N/Z计算绕组端部长度pD D pDavl i b 2)2)(2.122.111+=='ππ计算电枢绕组每匝平均长度)(2b avl L L '+=' 实取电枢绕组每匝平均长度av L 并绕根数br n导线电流密度a J ' 预估导线截面积a n J U P S br a N Nc''='η 预估导线直径πccS d '='4导线选取:导线型号(从数据库 ) 标称直径dc (从数据库 )导线最大直径dcmax (从数据库 ) 导线电阻率)20(ρ(从数据库 ) 电阻温度系数t p (从数据库 ) 导线计算截面积42c cd S π=导线最大截面积42max max c c d S π=槽满率计算公式选择 按裸线圆线计算 按裸线方线计算按漆包线最大外径圆线计算 按漆包线最大外径方线计算槽满率 a .S brc s s S n S N K =b .Sbrc s s S n S N K π4=c .Sbrc s s S n S N K max =d .Sbrc s s S n S N K πmax 4=(a 、b 、c 、d 分别与33中a 、b 、c 、d 对应)实际导线电流密度an S U PJ br c N Na η= 每相电枢绕组电阻brc avbr c av a n S l W n S m Nl r αραρΦ==)20(2)20(202导线工作温度电阻])20(1[20t a at p t r r ⨯-+=七.电枢反应计算起动电流 atst r UU I 22∆-= (星形三相六状态)atst r UU I ∆-= (星形三相三状态) 起动时每极直轴电枢反应最大值w st sdm K W I p F φ23=预取一电枢负载工作时的气隙磁通δΦ'额定时反电动势最大值N e n C E δΦ'=a .按方波设计w ie K W pC φα152= (星形三星六状态)w ie K W pC φα15= (星形三相三状态)b .按正弦波设计w e K pW C φ0.086582⨯=(星形三星六状态)w e K pW C φ0.08658= (星形三相三状态)额定工作时的平均电枢电流a .按方波设计:ata r EU U I 22-∆-= (星形三相六状态)ata r EU U I -∆-= (星形三相三状态)b .按正弦波设计:atat a r Er U U I 2827.022-∆-= (星形三相六状态)atat a r E r U U I 827.0-∆-= (星形三相三状态) 额定工作时每极最大去磁磁势W a adm K W I pF φ23= 负载工作点:(求取电机负载工作点要进行迭代计算,详见《求取空载负载工作点》文档)。