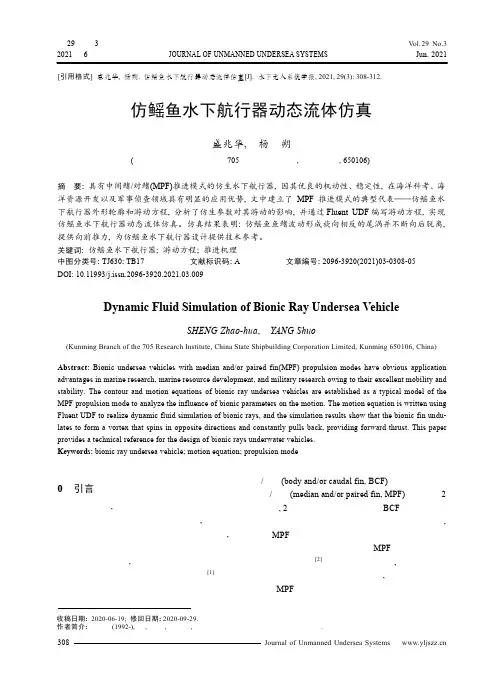
仿生鳐鱼水下机器人的设计与仿真分析
- 格式:pdf
- 大小:907.14 KB
- 文档页数:5
⽔中机器⼈2D仿真花样游泳技术分析⽔中机器⼈2D仿真花样游泳技术分析叶尚尚(哈尔滨⼯程⼤学,⿊龙江,哈尔滨 150001)摘要:为了丰富中国⽔中机器⼈⼤赛,在仿真平台上设计了花样游泳⽐赛项⽬在该⽐赛项⽬中,可以设定⽐赛队伍数⽬和每⽀队伍的机器鱼数⽬,并在仿真平台中⽣成显⽰机器鱼,同时在该平台上还实现了队伍名称等信息的传递本⽐赛项⽬⽀持任意队形的队列队形表演,取得了良好的仿真效果。
关键词:机器鱼;⽔球⽐赛;花样游泳;Design and realization of synchronized swimming of URWPGSim2DYE Shangshang(Engineering university in Harbin, 150001, China)Abstract:In order to enrich the underwater robot water polo game of china ,a synchronized swimming match based on the URWPGSim2D is designed.In this match ,the number of race teams and each team ’s fish numbers can be set ,and show the simulation platform is shown to generate robot fish ,while platform can be also realized to transfer the team name and other information This event supports the formation of any queue formation performance ,and achieves good simulation results.Keywords: robotic fish,water polo game,synchronized swimming;1 引⾔机器⼈技术是⼀项⾼度交叉的综合性技术,它融合了信息技术电⼦⼯程机械⼯程控制理论传感器技术以及⼈⼯智能等科学技术,是各种先进技术的综合性平台。
三维亥姆霍兹线圈驱动的仿生鳐鱼微机器人目录1. 内容描述 (2)1.1 研究背景 (2)1.2 研究意义 (3)1.3 文献综述 (4)1.4 研究方法与技术路线 (5)1.5 论文结构安排 (6)2. 三维亥姆霍兹线圈原理 (8)2.1 亥姆霍兹线圈的物理模型 (9)2.2 三维亥姆霍兹线圈的磁场分析 (9)2.3 磁场与流体动力学相互作用 (10)3. 仿生鳐鱼微机器人设计 (11)3.1 鳐鱼运动机制研究 (13)3.2 仿生鳐鱼微机器人的总体设计 (15)3.3 驱动系统的设计与选择 (16)3.4 仿生机构与控制策略 (17)4. 三维亥姆霍兹线圈驱动系统的设计与实现 (18)4.1 线圈系统的设计 (20)4.2 电源系统的设计 (22)4.3 线圈与微机器人的集成 (23)4.4 系统调试与性能评估 (24)5. 仿生鳐鱼微机器人的运动测试 (25)5.1 水下测试环境设置 (27)5.2 运动特性的测试与分析 (28)5.3 传感反馈与自主导航能力的测试 (29)5.4 应用场景模拟与性能评估 (30)6. 结论与展望 (31)6.1 研究结论 (32)6.2 存在的问题与不足 (33)6.3 未来研究方向与展望 (34)1. 内容描述本文介绍了一种基于三维亥姆霍兹线圈驱动的仿生鳐鱼微机器人。
该微机器人采用仿生设计,结构简化且生物相容性强,模仿了鳐鱼柔性尾鳍的运动模式。
通过利用三维亥姆霍兹线圈技术实现无接触驱动,微机器人能够在水中产生流畅的自适应运动,并具备灵活的转向和控制能力。
本文将详细阐述微机器人的设计理念、结构特点、工作原理以及运动性能评估结果。
探索了该仿生微机器人在水下微环境探测、生物医学应用等方面的潜在应用前景。
1.1 研究背景随着微纳米技术的飞速发展,微型机器人(micbotics)已经成为科学研究的热门领域,特别是在生物医学、工业检测和环境保护等方面展现出巨大的应用前景。
水翼法推进的仿生AUV研制及实验随着科技的不断发展,水下机器人在海洋资源勘探、教育、环境保护等领域发挥着越来越重要的作用。
而仿生学作为一门跨学科综合性的学科,也在水下机器人研究中得到了广泛应用。
本文介绍的是一种采用水翼法推进的仿生AUV,包括其研制过程和实验结果。
一、研制过程1. 设计原理仿生学中的鱼类水平移动是通过振动鳍鳍膜来完成的。
水翼法推进是将鱼类水平移动的原理转化为机械运动,使用机械运动来模拟水动力学,以提高AUV的效率。
水翼法推进采用两片水翼齐刻,倾斜角度相对大的设计,同时采用对称式,使得AUV的灵活性更高。
通过控制两片水翼的相位差,从而达到前后推进和转变航向方向的效果。
2. 实验过程在研发过程中,我们采用仿真软件对AUV进行设计和仿真。
首先,我们建立了AUV三维模型,并将水翼法推进的结构设计进去。
然后,通过改变水翼的相位差和倾斜角度等参数,在仿真软件中进行模拟实验。
最终获得了合适的设计参数。
接下来,我们开始进行实际的试验。
在试验过程中,我们选择了一个足够大的水池,并将AUV放入水池中。
通过遥控,我们控制了AUV的前后推进和左右方向的调整,并测量了其运动速度、转向精度等性能指标。
实验结果表明,我们的水翼法推进AUV可以通过相位差的控制,轻松地实现前后推进和转变方向的操作,而且具有高速度、更好的灵活性和稳定性等优点。
二、实验结果经过实验,我们获得了以下几点成果:1. 水翼法推进的仿生AUV结构设计得到实现。
2. 实现了水翼法推进的简单控制系统。
3. 实验结果表明,水翼法推进的仿生AUV可以实现较高速度、稳定性和优秀的灵活性。
通过本次实验,我们进一步验证了水翼法推进在仿生AUV中的应用优势,这对于进一步推进水下机器人的研发将具有一定的意义。
在水翼法推进的仿生AUV研制及实验中,需要对相关数据进行采集和分析,以评估其性能表现。
以下将列出所涉及到的数据并进行分析。
1.速度数据在实验中,我们通过计时器和距离测量仪器,测量了水翼法推进的仿生AUV运动的速度。
摇控制策略2023-11-09CATALOGUE目录•引言•基于变形仿生鳍的机器人系统概述•减摇控制策略设计•实验与验证•基于变形仿生鳍的机器人减摇控制策略优化•结论与展望01引言背景在海洋环境中,由于海浪、海流等多种复杂因素的影响,机器人运行时常常会遭遇严重的摇摆问题,这对其在海洋环境中的稳定运动和探测数据收集造成了严重干扰。
因此,对机器人的减摇控制策略进行研究具有重要的实际意义。
意义通过研究变形仿生鳍在机器人减摇中的应用,可以有效地提高机器人在海洋环境中的稳定性和适应性,提升其探测和作业效率,对海洋科学研究和海洋工程领域的发展具有重要推动作用。
研究背景与意义研究现状与发展现状目前,对于机器人的减摇控制策略,研究者们提出了许多方法,如鳍板优化、运动规划、控制算法等。
这些方法在一定程度上实现了机器人在海洋环境中的减摇效果,但仍然存在一些问题,如对海浪、海流等复杂环境的适应性不强,减摇效果有限等。
发展近年来,随着仿生学的不断发展,研究者们开始将生物的变形和运动机制应用于机器人的设计和控制中,如变形仿生鳍。
变形仿生鳍可以根据环境因素的变化进行动态调整,从而更好地适应海洋环境的复杂变化,提高机器人的减摇效果。
因此,变形仿生鳍在机器人减摇中的应用逐渐成为研究的热点。
研究内容与方法研究内容本研究旨在研究基于变形仿生鳍的机器人减摇控制策略,主要内容包括仿生鳍的设计与优化、机器人的建模与控制、实验平台的搭建与验证等方面。
方法首先,通过对海洋生物的变形和运动机制进行深入研究,设计并制作适用于机器人的变形仿生鳍。
其次,建立机器人的动力学模型和控制模型,并通过实验验证其有效性。
最后,搭建实验平台,进行机器人在模拟海洋环境中的减摇实验,验证变形仿生鳍在机器人减摇中的效果。
02基于变形仿生鳍的机器人系统概述1机器人系统组成23包括基座、驱动器、传动装置、仿生鳍等组成部分。
机械结构用于监测机器人姿态、鳍的运动和环境信息。
仿鳐鱼机器人可行性分析鳐鱼机器人是一种仿生机器人,它模仿了鳐鱼的外形和运动方式。
它的可行性分析主要包括技术可行性、市场可行性和商业可行性三个方面。
以下是对鳐鱼机器人可行性的分析。
技术可行性:仿鳐鱼机器人的设计需要涉及多个领域的技术,包括机械结构设计、材料选择、动力系统、运动控制系统和传感器等。
目前,这些技术在机器人领域已经有了相当程度的发展和应用,可以提供所需的支持。
例如,机械结构设计可以借鉴鳐鱼的骨骼形态和鳅鳍的运动特点;材料可以选择柔性硅胶和轻型金属;动力可以采用电池供电或太阳能发电,并结合节能技术延长机器人的工作时间;运动控制系统可以采用现有的水动力学理论和算法进行控制;传感器可以使用压力传感器和摄像头等来感知环境和进行控制。
因此,从技术上来说,仿鳐鱼机器人是可行的。
市场可行性:仿鳐鱼机器人在市场上有较大的应用潜力。
首先,它可以应用于海洋勘探和海洋生物研究领域,可以替代传统的潜水器械,以更加灵活和精确的方式进行水下探测和观测。
其次,它可以应用于水下清洁、维修和保洁等工作,能够更好地适应复杂的环境和任务需求。
此外,仿鳐鱼机器人还可以应用于水上运输、水下救援和娱乐等领域,具备广阔的市场空间。
因此,从市场上来说,仿鳐鱼机器人也是可行的。
商业可行性:仿鳐鱼机器人的商业可行性需要考虑多个因素。
首先,它的生产成本和维护成本需要控制在合理范围内,使得产品能够具备竞争力。
其次,市场需求和竞争情况需要充分调研和分析,确保产品的市场占有率和盈利能力。
再次,品牌建设和销售渠道的构建需要投入大量的人力和物力。
最后,政策和法律环境的支持也对商业可行性起到积极的影响。
综上所述,从商业角度来说,仿鳐鱼机器人也是可行的。
总结起来,从技术可行性、市场可行性和商业可行性三个方面来看,仿鳐鱼机器人是可行的。
随着科技的日益发展和市场需求的不断增长,仿生机器人将会有更加广阔的应用前景。
当然,在实际应用过程中,我们还需要进一步解决一些具体问题,如耐久性、反应速度和适应性等方面的挑战。
仿生鱼机器人设计说明书目录第一章绪论 (3)1.1目的及意义 (4)1.2研究现状 (4)1.3本文的主要工作 (4)第二章概述 (5)2.1 整体构思 (5)2.2 仿生依据 (5)第三章机械结构设计 (7)3.1机械设计思路及建模 (7)3.2创新点 (8)3.3 零件明细 (9)第四章仿真分析 (10)第五章电路设计 (12)第六章控制系统 (13)第七章总结 (17)7.1优势及创新点 (17)7.2主要关键技术 (17)7.3 应用前景与趋势 (18)7.4 不足与改进 (18)仿生鱼机器人设计说明书第一章绪论1.1目的及意义21世纪是海洋的世纪,占全球 71%面积的海洋将是下一个世纪,也是未来人类赖以生存的资源海洋,对于人类的发展和社会的进步将起到至关重要的作用。
在民用上,海洋蕴藏着丰富的矿物资源、海洋生物资源和能源,是人类社会可持续发展的重要财富。
因此,对于海洋的开发和争夺成了很多发达国家的战略重点,而且愈演愈烈。
在各种海洋技术中,作为用在一般潜水技术不可能到达的深度或区域进行综合考察和研究并能完成多种作业使命的水下机器人使海洋开发进入了新时代。
随之“蓝色经济”越来越成为各沿海地区经济发展的“正能量”,大规模的开发探测和利于海洋资源,已经成为我们 21 世纪要面对和必须解决的现实问题。
另外,军事方面对其需求也日益增加,为了适应这种需求,研究和开发潜水器和水下机器人成为了极佳的选择。
鱼类经过长期的自然选择,具备非凡的游动能力,近年来随着仿生技术的进步,人类纷纷模仿自然界中鱼类的运动方式和运动器官,即各种各样的水下机器人。
世界上第一台水下机器人“Poodle”诞生于 1953 年。
近 20 年来,水下机器人有了很大的发展,它们既可军用又可民用。
到目前为止,全世界大约共建造了6000 多台各种各样的水下机器。
水下机器人有广泛的应用空间,民用和军用均可,不仅可以代替潜水员在深水长时间工作,降低工作风险,提高工作效率,而且还可以检测水污染状况,监测鱼类生长状况,探测海底火山活动状况;在军事方面,可以用于跟踪敌人的船舰和潜艇,捕获地方军事信息,也可以降低敌人对我军的探测几率,甚至可以携带炸药至敌人军舰处,炸毁敌方舰艇的动力系统,摧毁敌方舰队。
基于混合推进方式的水下仿生鱼机器人研究设计摘要:论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。
关键词:混合推进式;仿生;机器人设计1 水下仿生鱼机器人概述1.1 水下机器人的背景随着全球经济、科研活动的深入发展,地球的陆地资源正在逐步减少,有朝一日终将会被挖掘殆尽。
而地球表面60%以上是海洋,海洋中蕴藏着比陆地上更加丰富的自然资源。
而面对海洋这么大的面积,使用机器取代人力是必然的发展趋势。
目前机器人发展迅速,海底机器人正变得越来越重要。
1.2 仿生机器人的起源科学家们通过将仿生学和机器人两大学科相结合,提出了水下仿生机器人这一概念,水下仿生机器人根据海洋生物的外形结构和运动方式进行设计,由于海洋生物进过了长期的进化,其外形结构能够很好地适应水下的环境,因此设备运用仿生的理念能帮助人类更好地了解海洋。
美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。
研究人员于1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。
紧接着,英国赛克斯大学(Essex)就以鱼类结构为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线和转向问题。
而美国海洋学中心则是把对生物模仿得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”,按照龙虾的身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。
1.3 水下仿生鱼机器人的设计意义水下仿生鱼机器人用途广泛,涉及到各个领域。
在民用方面,通过采集水下图像可完成资源勘探、海洋生物研究、海底地势地貌绘制、海底管道检修、鱼群监测、地理研究、水质采用等等。
在军用方面,可以为水下机器人加装声呐、排雷装置等,从而执行特定的军事任务,如定点监控、海底侦查、信息传输、协同作战等等。
由此可见,水下仿生鱼机器人的设计具有很大的发展前景,如何合理地设计水下仿生鱼的外观结构,使其实现相应的功能尤为重要。
仿生鱼机器人设计说明书目录第一章绪论 (3)1.1目的及意义 (4)1.2研究现状 (4)1.3本文的主要工作 (4)第二章概述 (5)2.1 整体构思 (5)2.2 仿生依据 (5)第三章机械结构设计 (7)3.1机械设计思路及建模 (7)3.2创新点 (8)3.3 零件明细 (9)第四章仿真分析 (10)第五章电路设计 (12)第六章控制系统 (13)第七章总结 (17)7.1优势及创新点 (17)7.2主要关键技术 (17)7.3 应用前景与趋势 (18)7.4 不足与改进 (18)仿生鱼机器人设计说明书第一章绪论1.1目的及意义21世纪是海洋的世纪,占全球 71%面积的海洋将是下一个世纪,也是未来人类赖以生存的资源海洋,对于人类的发展和社会的进步将起到至关重要的作用。
在民用上,海洋蕴藏着丰富的矿物资源、海洋生物资源和能源,是人类社会可持续发展的重要财富。
因此,对于海洋的开发和争夺成了很多发达国家的战略重点,而且愈演愈烈。
在各种海洋技术中,作为用在一般潜水技术不可能到达的深度或区域进行综合考察和研究并能完成多种作业使命的水下机器人使海洋开发进入了新时代。
随之“蓝色经济”越来越成为各沿海地区经济发展的“正能量”,大规模的开发探测和利于海洋资源,已经成为我们 21 世纪要面对和必须解决的现实问题。
另外,军事方面对其需求也日益增加,为了适应这种需求,研究和开发潜水器和水下机器人成为了极佳的选择。
鱼类经过长期的自然选择,具备非凡的游动能力,近年来随着仿生技术的进步,人类纷纷模仿自然界中鱼类的运动方式和运动器官,即各种各样的水下机器人。
世界上第一台水下机器人“Poodle”诞生于 1953 年。
近 20 年来,水下机器人有了很大的发展,它们既可军用又可民用。
到目前为止,全世界大约共建造了6000 多台各种各样的水下机器。
水下机器人有广泛的应用空间,民用和军用均可,不仅可以代替潜水员在深水长时间工作,降低工作风险,提高工作效率,而且还可以检测水污染状况,监测鱼类生长状况,探测海底火山活动状况;在军事方面,可以用于跟踪敌人的船舰和潜艇,捕获地方军事信息,也可以降低敌人对我军的探测几率,甚至可以携带炸药至敌人军舰处,炸毁敌方舰艇的动力系统,摧毁敌方舰队。
一种新型仿生机器鱼的机构设计与执行摘要本文引入了一种机器鱼的机构设计方法。
基于这种方法,设计一种带有胸鳍和尾鳍的自主三维运动机器鱼。
胸鳍是三自由度机器,使得机器鱼能够通过控制两个胸鳍来实现偏航和纵向运动。
而尾鳍机构设计是基于拟合机器鱼波状与运动曲线。
向前的速度可以通过改变尾部机构摆动频率来实现。
最后给定机器鱼的物理执行机构和实验结果。
关键字:仿生,鱼体波形,机械,机器鱼,胸部,尾部0.介绍许多机器人概念的设计源于自然界,因为自然选择已使得生物对环境有很好的适应性。
一个典型的例子就是鱼推进机理的研究,这个研究可以提高水下航行器的性能。
不同于传统的螺旋桨推进的水下航行器,鱼依赖于鳍和尾部的运动来提供向前的推力。
对于真实鱼科学研究发现,这种推进方式能产生更高效率的推力并且产生的噪声很小。
受这种发现的激发,许多学者已经开始致力于研究机器鱼,以具有高速和操纵性良好的小型水下航行器的发展提供更多的线索。
先前有关机器鱼发展的努力工作可以追溯到1991年robotuna的triantafyliou等人的著作。
装有柔性尾部和上下摆动薄片(尾鳍)的机构能够产生额外的流体动力以产生推力,robotuna得出了这种方式的许多优点,包括能源的节约和长任务持续时间。
在这个成功的例子之后,许多机器鱼被研究用于不同的目的。
为了证实鱼胸鳍的作用,kato在1995年制作了“黑鲈鱼”号,这条“鱼”配备了胸鳍状机构。
实验结果表明波状运动和一对胸鳍的引导共同决定了向前,向后,悬停和旋转运动。
在2003年,Guo等人呈现了一种类似鱼的水下微型机器人的原型。
这种机器人有两个独立控制的尾鳍,一个体姿态调整器和一个浮力调整器。
为了认识三自由度的游动,一种离子控制聚合体薄膜激励被利用来作为伺服激励。
在2004年,koichi设计了一种机器鱼的原型。
它的体长大概600mm并且它带有三个铰链连接的尾部,这些铰链的运动是通过两个带有初始链接结构的补助马达间接变速装置来激励的。
仿生机器鱼三维仿真分析仿生机器鱼是一种模仿鱼类身体结构和游动方式的机器人,它具有良好的机动性和适应性。
在实际应用中,仿生机器鱼可以用于水下勘察、水下探测和水下救援等任务。
为了提高仿生机器鱼的性能,需要进行三维仿真分析,以评估其运动性能和机械结构的稳定性。
首先,三维仿真分析可以用来研究仿生机器鱼的游动方式。
通过建立仿真模型,可以模拟仿生机器鱼在水中的游动轨迹和姿态变化。
通过对仿真结果进行分析,可以确定最佳的游动策略和运动控制算法,以提高机器鱼的运动效率和稳定性。
其次,三维仿真分析可以用来研究仿生机器鱼的机械结构。
通过建立仿真模型,可以对机器鱼的鱼体结构和鱼尾运动机构进行分析。
通过对仿真结果进行分析,可以确定最佳的机械结构设计,以提高机器鱼的机动性和适应性。
在进行仿真分析时,需要考虑以下几个关键因素:1.流体动力学模拟:仿真模型应该能够准确地模拟水的流动和水与机器鱼之间的相互作用。
可以使用计算流体动力学(CFD)方法来模拟水的流动,以及根据流体动力学模拟结果对机器鱼的运动进行分析。
2.运动控制模拟:仿真模型应该能够模拟机器鱼的运动控制算法,以及根据运动控制模拟结果对机器鱼的运动行为进行分析。
可以使用动力学模拟方法来模拟机器鱼的运动控制算法。
3.结构强度分析:仿真模型应该能够模拟机器鱼在水中的受力情况,以及对机器鱼的机械结构进行强度分析。
可以使用有限元分析(FEA)方法来模拟机器鱼的受力情况,以及对机械结构的强度进行分析。
通过三维仿真分析,可以评估仿生机器鱼的运动性能和机械结构的稳定性,为进一步优化设计提供参考。
同时,仿生机器鱼的仿真模型也可以用于测试新的运动策略和结构设计,以提高机器鱼的性能和适应性。
总之,三维仿真分析是研究仿生机器鱼的运动性能和机械结构稳定性的重要手段。
通过建立仿真模型,可以模拟机器鱼的游动方式和机械结构,对其进行分析和评估,为优化设计提供参考。
仿生机器鱼的仿真分析结果可以用于改进机器鱼的运动控制算法和机械结构设计,以提高其性能和适应性。
学校代码:11517学号:0708071012HENAN INSTITUTE OF ENGINEERING毕业设计题目仿生机器鱼三维仿真分析学生姓名刘欢乐专业班级机械设计制造及自动化0701学号0708071012系(部)机械工程系指导教师(职称) 王新莉(教授)孟凯(助教)完成时间 2011年5月25日河南工程学院论文版权使用授权书本人完全了解河南工程学院关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交论文的印刷本和电子版本;学校有权保存论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存论文;学校有权提供目录检索以及提供本论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版;在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
论文作者签名:年月日河南工程学院毕业设计(论文)原创性声明本人郑重声明:所呈交的论文,是本人在指导教师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
论文作者签名:年月日河南工程学院毕业设计(论文)任务书题目仿生机器鱼三维仿真分析专业机械设计制造及自动化学号0708071012姓名刘欢乐主要内容、基本要求、主要参考资料等:选题背景:鱼形机器人不仅可以用于水下考古、水中摄影、探查狭窄水道、测绘海底地形地貌,还可进行水中养殖和捕捞,并作为水下微小型运载工具,在抢险搜救等工作中发挥重要作用。
主要内容:设计一款机器鱼的执行机构,对设计的机构进行三维仿真研究。
基本要求:建立三维模型,进行仿真研究,完成实物制作,提交设计说明书等设计相关资料。
主要参考资料:机电一体化系统设计传感器技术机器人技术机构设计相关科研论文10篇完成期限:指导教师签名:专业负责人签名:年月日目录摘要 (I)ABSTRACT (II)1 引言 (1)1.1 本文研究的目的及意义 (3)1.2 国内外研究现状 (4)1.2.1 国内研究现状 (4)1.2.2 国外研究现状 (6)1.3 论文的主要研究内容 (8)2 仿生机器鱼的机构设计概况 (9)2.1 仿生机器鱼的机构 (9)2.2 舵机设置 (10)3 仿生机器鱼的三维建模与运动分析 (12)3.1 建模软件的选取 (12)3.2 仿生机器鱼的三维实体建模 (13)3.2.1 仿生机器鱼鱼头和鱼尾的三维建模 (14)3.2.2 仿生机器鱼鱼身的三维建模 (15)3.2.3 虚拟装配 (17)3.3 仿生机器鱼的运动分析 (17)4 仿生机器鱼的三维仿真实现 (19)4.1 仿生机器鱼三维仿真的简介 (19)4.2 仿生机器鱼三维仿真 (20)结论与展望 (25)毕业设计工作总结 (27)致谢 (28)参考文献 (29)仿生机器鱼三维仿真分析摘要本文首先对小型鱼类现有的研究进行了描述,表明了鱼类在水下的优势对仿生机器鱼的研究发展将起到重要作用。
仿生机器人应用于海洋探索的设想随着科技的不断发展,人类对于探索未知的欲望也越来越强烈,尤其是对于海洋这样广袤、神秘的世界。
然而,海洋作为地球上最大的生态系统,它的复杂性和危险性也给人类进一步探索带来了巨大的挑战。
在这样的情况下,仿生机器人成为了一种新的可行性方案,它可以实现对海洋世界的大量探索,同时也可以避免人类因为危险而导致的牺牲。
在目前的技术水平下,仿生机器人在模拟海洋生物方面已经有了很大的进化。
其中最具代表性的就是仿照鱼类进行设计的鱼雷机器人。
与传统的机器人相比,鱼雷机器人更加自然,不仅具有很好的灵活性和敏捷性,而且还可以有效地减少了能耗和噪音,从而更好地保护了海洋生态环境。
与此同时,鱼雷机器人的主体材料也应采用类似生物体的材料,以实现更自然而且高效的运动。
除了鱼雷机器人,仿生机器人还可以模拟其他海洋生物,如章鱼、海胆、海星等。
这些机器人不仅可以进行探索和观察,还可以像真正的生物一样进行柔软的触摸和操作。
在探测任务中,这些仿生机器人可以模拟海洋生物的运动方式,穿过不同深度的水域,对海底物质进行探测和分类。
同时,针对不同深度和底部环境的机器人还需要不同的形状和大小设计,这就需要科学家们对不同生物的生理学知识有更深入的了解和认识,以便设计更加适合的机器人。
当然,如何实现仿生机器人的高效控制系统也是一个难点。
对于控制系统的需求,首先要保证机器人不受外界干扰,同时还要让它具备自主性,可以在不同的海底环境下快速的适应。
因此,机器人的传感技术、运动控制等方面的技术需求也日益增加。
仿生机器人在海洋探索中的应用还有许多未知的领域等待处理和发掘。
例如,仿生机器人也可以帮助科学家研究海底生物学,复制海洋中的动态生态系统,甚至可以帮助深海油田的开采。
仿生机器人的应用可以让科学家们更加深入的了解海洋的奥秘,同时还可以帮助保护海洋环境,拯救大量珍贵的海洋生物。
在未来,仿生机器人会逐渐发展成为海洋领域的“太空飞船”,助力科学家们探索海洋区域,开启新的发现之旅。