仿生水下机器人运动仿真技术研究
- 格式:pdf
- 大小:226.98 KB
- 文档页数:5
水下机器人的运动学与动力学建模随着现代技术的不断进步,水下机器人在海洋勘探、海洋工程、深海探测等领域发挥着重要作用。
而要实现水下机器人的精确控制,则需要对其运动学和动力学进行建模。
本文将探讨水下机器人的运动学和动力学建模方法。
一、水下机器人的运动学建模运动学主要研究物体的运动规律,对于水下机器人来说,其运动学模型可以通过描述其姿态、位置和速度等参数来实现。
一般而言,水下机器人的姿态可以通过欧拉角或四元数来描述,位置可以使用三维坐标表示,速度可以表示为线速度和角速度。
从几何角度来看,水下机器人的运动可分为平动和转动两种方式。
对于平动来说,可以使用直角坐标系描述机器人的位置变化,而转动则可以通过旋转矩阵或四元数描述机器人的姿态变化。
此外,水下机器人的运动学模型还需要考虑其各个关节和执行器之间的约束关系。
这些约束可以通过关节角度和关节速度等参数表示,从而实现对机器人运动的精确把控。
二、水下机器人的动力学建模动力学研究物体在受力作用下的运动规律,对于水下机器人来说,其动力学模型需要考虑机器人在水中受到的浮力、阻力、重力和推力等力的作用。
在水下环境中,浮力是一个重要的力,可以通过机器人体积和水密度等参数计算得出。
阻力则是因为水的粘性所产生,需要考虑机器人表面积、速度和水的粘滞系数等因素。
重力则是机器人所受的地球引力,可以根据重力加速度和机器人质量得出。
而推力则是通过机器人的推进器产生的作用力。
综上所述,水下机器人的动力学模型可以通过考虑上述各方面的力来建立。
利用牛顿第二定律和力的平衡条件,可以得出水下机器人的运动方程。
通过求解这些方程,可以得到机器人在不同外界作用力下的运动状态,为水下机器人的控制提供理论支持。
三、水下机器人运动学与动力学的关系水下机器人的运动学和动力学密切相关,运动学提供了机器人位置、姿态和速度等参数的描述,而动力学则研究了机器人在受力作用下的运动规律。
在实际应用中,水下机器人的运动学和动力学模型可以结合起来使用。
水下机器人设计及动力学仿真分析水下机器人是一种可以在水下进行任务的机器人,广泛应用于海洋、水库、水文、地质、生态等领域。
设计一款水下机器人需要考虑机器人的结构、动力、控制、传感、通信等方面。
在机器人设计过程中,动力学仿真分析是非常重要的一步。
一、水下机器人结构设计水下机器人的结构设计需要考虑机器人的外形、重量、浮力、机动性等问题。
一般来说,水下机器人会采用静压平衡的设计方案,将机器人的重心保持在机器人的浮力中心上方,使机器人能够在水下保持稳定。
此外,为了提高机器人的机动性,一些水下机器人会采用多自由度的设计方案,使机器人能够在水下进行各种灵活的动作。
二、水下机器人动力分析水下机器人在水中行动需要消耗能量,动力学仿真分析可以帮助设计者计算机器人在水下的运动能力和能源消耗。
在动力学仿真分析中,需要考虑机器人的外形、密度、流体阻力、推进器效率等因素。
利用计算机模拟机器人在水中的运动可以评估机器人的性能,为机器人设计和改进提供数据支持。
三、水下机器人推进器设计水下机器人的推进器设计是确保机器人在水中行动的关键因素之一。
通常情况下,水下机器人会通过电动机驱动螺旋桨或者水流喷射器进行推进。
在推进器设计中,需要考虑推进器的效率、推进力、流量、噪音等因素,以及与机器人结构的协调性和可靠性。
四、水下机器人动力控制水下机器人的动力控制需要考虑机器人的稳定性、操控性和能耗等因素。
通过控制机器人的推进器转速和方向,可以实现机器人的运动和悬停。
动力控制系统需要采用高精度的控制算法,以保证机器人的运动效率和稳定性。
五、水下机器人传感和通信水下机器人的传感和通信是机器人完成任务的关键因素之一。
水下机器人需要搭载各种传感器,如深度传感器、温度传感器、氧气传感器、声纳传感器等,以监测周围环境的变化。
同时,水下机器人需要能够与外部设备进行通信,以控制和获取机器人的状态信息。
综上所述,设计一款性能优秀的水下机器人需要综合考虑机器人的结构、动力、控制、传感、通信等因素。
仿生机器人技术的研究现状与前沿近年来,仿生机器人技术在科技领域备受关注,它将现代工程技术和生物学原理结合起来,将人类与机器融合为一体。
仿生机器人技术通过模拟生物系统的思维、学习、适应、控制等机制,使机器人能够更好地适应自然环境,从而实现更加智能化的操作。
本文将探讨当前仿生机器人技术的研究现状和未来的前沿发展。
一、仿生机器人技术的研究现状目前,仿生机器人技术的研究已经涉及到各个领域。
其中,仿生机器人技术的研究领域包括仿生传感器、智能控制、自主导航、柔性材料、生理仿真模型、生物运动学和神经科学等。
这些领域中的技术都是基于生命和环境适应性的基本原则,实现机器人的多功能适应。
1.仿生传感器仿生传感器可以模仿人体感觉器官的结构和工作原理,包括视觉、听觉、触觉、嗅觉和味觉。
这些传感器可以使机器人更好地适应环境,从而实现更高效的操作。
例如,蜘蛛机器人通过仿真蜘蛛的感觉器官,可以在复杂的环境中准确地定位和轨迹跟踪。
2.智能控制智能控制是一个重要的研究领域,它包括多种控制技术,如人工智能、模糊控制和神经网络等。
这些控制技术可以使机器人更好地适应环境,从而实现更高效的操作。
例如,研究人员使用基于非线性控制的算法,实现了一种具有自主避障和控制能力的水下机器人。
3.自主导航自主导航是一个重要的研究领域,它可以使机器人在复杂的环境中自主移动和组合成群状进行协作。
例如,研究人员使用机器视觉技术,在水下环境中实现了对鱼群的监测和跟踪,从而实现了更加智能化的控制。
4.柔性材料柔性材料是一种能够与环境相适应的材料,可以使机器人更加灵活和敏捷。
例如,柔性植物机器人,可以通过模仿植物的生理结构和运动方式,实现更好的环境适应性和操作能力。
二、仿生机器人技术的前沿发展随着科技的发展,仿生机器人的研究领域将会越来越广泛,其前沿发展也将日益迅速。
以下是当前仿生机器人技术的前沿发展趋势。
1.光学仿真光学仿真是一种基于光学技术的仿真方法,可以将视觉图像直接传输到机器人中。
基于仿生机器鱼技术的水下机器人研究水下机器人的研究和发展一直是科技界关注的焦点之一。
随着科技水平的不断提高和新技术的不断涌现,人们对水下机器人的期望也越来越高。
近年来,随着仿生机器鱼技术的发展,水下机器人领域迎来了一次新的变革。
一、仿生机器鱼技术的原理及应用仿生机器鱼研究的原理是基于鱼类的生物学特性,将其应用于机器人的设计和制造中。
仿生机器鱼能够根据自己的运动状态、环境变化等因素进行相应的调整和控制,从而达到一定的适应性、灵活性和智能化。
仿生机器鱼技术的应用领域非常广泛,包括水下探测、海洋环境监测、水下作业、深海勘探等方面。
与传统的水下机器人相比,仿生机器鱼具有更好的机动性、航行性和自适应性,能够在复杂的海底环境中执行各种任务。
二、水下机器人的研究现状及发展趋势当前,水下机器人在海洋勘探、海洋科学研究、海底资源开发等领域得到了广泛的应用。
在这些领域中,水下机器人需要具备高精度、高效率、高可靠性等特点,能够完成各种复杂的任务。
针对这些需求,科技界开展了大量的研究工作,涉及到机器人的机械结构、智能控制、材料制备等多个方面。
同时,仿生机器鱼技术的不断发展为水下机器人的研究提供了一种全新的思路和方法。
未来,水下机器人将会越来越普及和应用,随着人工智能、物联网等新技术的发展,水下机器人将具备更高的智能化和自主性,能够在更多的领域中发挥出更大的作用。
三、基于仿生机器鱼技术的水下机器人研究案例近年来,国内外的许多研究机构和企业都在开展基于仿生机器鱼技术的水下机器人研究工作。
以下是几个典型的研究案例:1. 「北京航空航天大学仿生机器人实验室」的仿生机器鱼北京航空航天大学仿生机器人实验室研制的仿生机器鱼外形逼真,能够实现自主控制、路径规划和障碍物避免等功能。
该机器鱼的研发对于提高水下机器人的智能性和机动性具有重要意义。
2. 日本东京大学研究组的多关节仿生机器鱼东京大学研究组设计的多关节仿生机器鱼由多个模块组成,能够实现自主航行、鱼群协作等功能。
基于模糊PID的小型ROV定深运动控制仿真小型ROV(遥控无人潜水器)是一种具有自主潜水和操纵功能的机器人,在海洋科学研究、工程勘察、水下探测等领域有着广泛的应用。
ROV的定深运动控制是其核心技术之一,对于保证ROV在水下作业过程中的稳定性和精准性有着重要的意义。
本文将基于模糊PID控制算法,对小型ROV的定深运动控制进行仿真研究,以期为ROV的控制系统设计和优化提供参考和借鉴。
1. 引言小型ROV因其结构简单、成本低廉、操控方便等特点,在水下作业和科学研究中得到广泛应用。
ROV的定深运动控制是其重要的控制任务之一,即使在水下环境中也需要保持稳定的深度,以保证其作业的顺利进行。
传统的PID控制器在定深运动控制中存在着某些不足,例如对于非线性、不确定性比较大的系统难以有效控制。
而模糊PID控制算法可以在一定程度上克服传统PID控制器的不足,对非线性、不确定性比较大的系统有着较好的适应性和鲁棒性。
本文将采用模糊PID控制算法对小型ROV的定深运动控制进行仿真研究。
2. 水下ROV的定深运动控制原理水下ROV的定深运动控制是指在水下作业过程中,保持ROV在预定深度范围内的运动控制。
常见的水下ROV定深运动控制方法包括PID控制、模糊控制、神经网络控制等。
PID 控制是一种经典的控制方法,通过调节比例、积分和微分三个控制参数来实现系统的稳定控制。
模糊控制是一种基于模糊逻辑的控制方法,可以有效处理非线性、不确定性较大的系统。
神经网络控制则是通过神经网络模拟人脑的学习和适应能力,实现对系统的控制。
在水下ROV的定深运动控制中,一般采用利用水下传感器获取水下压力信息,进而计算出ROV所处的深度,并通过控制ROV的浮力或推进器,以保持ROV在预定深度范围内的运动控制。
PID控制器的输入信号为深度误差(期望深度与实际深度之差),输出信号为控制ROV的浮力或推进器。
3. 模糊PID控制算法原理模糊PID控制算法是将模糊控制和PID控制相结合的一种控制方法。
水下机器人的运动姿态控制方法研究随着科技的不断进步,水下机器人的应用越来越广泛,并受到了人们的广泛关注。
然而,水下机器人在执行各种任务时,需要保持稳定的运动姿态,这对于控制系统的设计和优化具有挑战性。
因此,如何有效地控制水下机器人的运动姿态是一个广泛研究的问题。
本文将从多个角度深入探讨水下机器人的运动姿态控制方法。
一、水下机器人的运动姿态控制目标水下机器人的运动姿态控制的目标是保持机器人在水下稳定、平衡的运动状态。
这是执行各种任务的前提。
水下机器人在执行任务时,其运动姿态控制要达到以下几个目标:1.维持水下机器人的稳定性,防止机器人在运动时产生惯性力,导致倾斜;2.控制水下机器人在水下的位置与姿态,保证其在浅海、深海等不同环境下的稳定性;3.控制水下机器人的运动速度,以便完成不同的任务。
以上几点是水下机器人运动姿态控制的基本目标,实现这三个目标需要采用不同的控制方法。
二、水下机器人的运动姿态控制方法在实践中,水下机器人的运动姿态控制方法主要有以下几种方式:1. PID控制PID控制是一种常用的控制方式,也是水下机器人运动姿态控制中最常用的一种方法。
PID控制通过对水下机器人的偏差进行反馈、校正,以达到控制机器人运动姿态的目的。
PID控制器通过计算偏差的比例、积分和微分,来调节输出控制信号,系统的响应也会更加快速、精确。
2. 模型预测控制模型预测控制是一种智能优化的控制方法。
该方法基于数学模型,经过多次仿真和训练后,通过计算未来的状态变化趋势,来预测机器人的运动姿态,进而控制机器人的运动姿态。
模型预测控制器具有精确性高、控制灵活性强、适应性好等特点,是一种理想的水下机器人运动姿态控制方法。
3. 自适应控制自适应控制是一种根据系统的反馈信息,实现自我修正的控制方法。
该方法根据水下机器人的运动姿态和环境信息,在实时不断地调节目标参量,以控制机器人的运动姿态。
自适应控制具有自适应性强、控制精度高、鲁棒性好等特点,是一种应用广泛的水下机器人运动姿态控制方法。
现代电子技术Modern Electronics TechniqueJan. 2024Vol. 47 No. 22024年1月15日第47卷第2期0 引 言随着水下机器人技术的发展,海参捕捞机器人正逐步取代费时费力且危险性极高的人工捕捞作业[1]。
采用水下机器人进行海参捕捞,不仅解放了人力,还扩大了捕捞范围,提高了海参的捕获量。
为了保证海参捕捞机器人的作业时间,同时保证机器人通信的稳定性,一般将其设计为有缆水下机器人(ROV )[2‐3]。
但是由于海底的作业环境恶劣多变和机器人的结构功能复杂,同时所捕捞的海参也会对机器人的运动造成干扰,导致机器人的运动控制难度增大,一旦控制精度降低,将会影响海参的捕捞效率,严重时还会导致机器人发生侧翻。
由此DOI :10.16652/j.issn.1004‐373x.2024.02.027引用格式:葛安亮,陈浩,邵绪新,等.海参捕捞机器人运动控制系统的仿真研究[J].现代电子技术,2024,47(2):147‐154.海参捕捞机器人运动控制系统的仿真研究葛安亮1, 陈 浩1, 邵绪新2, 李相坤1(1.中国海洋大学 工程训练中心, 山东 青岛 266100; 2.中国海洋大学 工程学院, 山东 青岛 266100)摘 要: 随着水下机器人技术的发展,海参捕捞机器人将逐渐取代费时费力的人工捕捞作业。
但是海参捕捞机器人的运动控制精度一直影响其运动稳定性和捕捞效率,一方面是由于海底的作业环境恶劣多变,机器人的结构功能复杂;另一方面是随着海参的累积,机器人的参数发生改变,原有控制模型的控制精度下降。
为提高海参捕捞机器人的运动控制精度,在综合考虑机器人各种载荷的基础上,还考虑了海参对机器人造成的干扰,建立更加全面的机器人动力学模型;并运用模型预测控制理论和非线性干扰观测器对机器人的运动过程进行模拟分析。
通过分别模拟机器人的定深下潜、运动姿态保持、路径跟踪和载重上升运动过程,定量分析机器人的运动控制精度,最后构建一个系统全面且精度较高的海参捕捞机器人运动控制系统。
水下机器人智能运动控制技术研究的开题报告一、研究背景水下机器人是一种能够在海洋、河流等水下环境中执行各种任务的机器人,具有较高的灵活性、安全性和可控性等特点。
为了实现水下机器人的高效、精确、稳定的运动控制,需要研究水下机器人智能运动控制技术。
二、研究目的和意义水下机器人智能运动控制技术的研究旨在通过大量实验和理论研究,提高水下机器人的自主感知、决策和执行能力。
运用先进的智能控制技术,建立水下机器人的精确动态模型,通过仿真和实验研究不同场景下的运动控制问题,进而实现水下机器人的高效、稳定、安全的运动控制。
三、研究内容1.建立水下机器人的动力学模型,研究不同运动方式下机器人的姿态控制问题。
2.研究水下机器人的自主感知技术,包括声、电等传感器,采用机器视觉技术实现海底环境的实时识别。
3.开发水下机器人运动控制系统,包括运动控制算法、控制器设计和实时控制。
4.利用仿真和实验研究在不同环境下的控制效果,评价控制算法的有效性和鲁棒性。
四、研究方法1.建立水下机器人的精确动态模型,研究其相关控制问题。
2.应用机器视觉技术对海底环境进行实时环境感知。
3.结合控制理论,开发水下机器人的运动控制系统,包括控制算法、控制器设计和实时控制等。
4.利用各种仿真软件和实验平台验证不同场景下的运动控制算法效果,评价其实用性。
五、预期成果1.建立水下机器人的精确动态模型和环境感知技术,提高机器人的自主控制水平。
2.开发水下机器人运动控制系统,使其能够在不同环境下执行各种任务。
3.通过实验验证运动控制算法的有效性和鲁棒性。
六、研究进度和计划1.前期调研、文献综述及建立动态模型(3个月)2.环境感知技术的研究和水下机器人运动控制系统的设计(9个月)3.仿真和实验验证运动控制算法的有效性和鲁棒性(4个月)4.撰写论文、完成答辩(4个月)七、预期研究难点1.建立水下机器人精确的动力学模型,分析海流、海浪等复杂场景下的运动控制问题。
2.开发高效、稳定的运动控制算法。
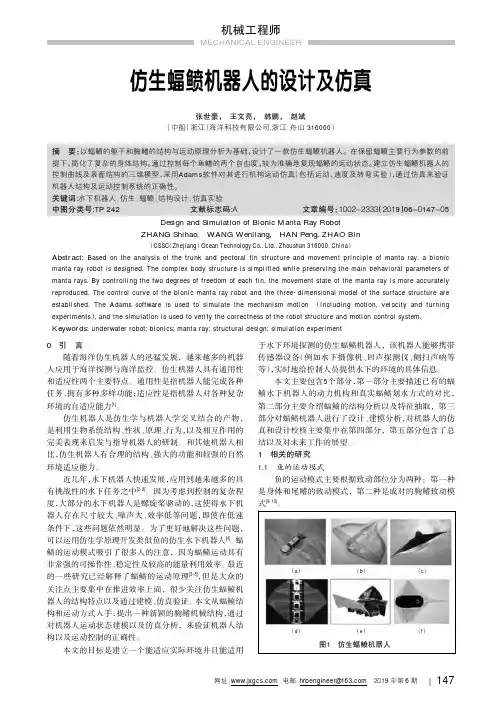
仿生蝠鲼机器人的设计及仿真张世豪,王文亮,韩鹏,赵斌(中船(浙江)海洋科技有限公司,浙江舟山316000)摘要:以蝠鲼的躯干和胸鳍的结构与运动原理分析为基础,设计了一款仿生蝠鲼机器人。
在保留蝠鲼主要行为参数的前提下,简化了复杂的身体结构。
通过控制每个鱼鳍的两个自由度,较为准确地复现蝠鲼的运动状态。
建立仿生蝠鲼机器人的控制曲线及表面结构的三维模型,采用Adams软件对其进行机构运动仿真(包括运动、速度及转弯实验),通过仿真来验证机器人结构及运动控制系统的正确性。
关键词:水下机器人;仿生;蝠鲼;结构设计;仿真实验中图分类号:TP242文献标志码:A文章编号:1002-2333(2019)06-0147-05Design and Simulation of Bionic Manta Ray RobotZHANG Shihao,WANG Wenliang,HAN Peng,ZHAO Bin(CSSC(Zhejiang)Ocean Technology Co.,Ltd.,Zhoushan316000,China)Abstract:Based on the analysis of the trunk and pectoral fin structure and movement principle of manta ray,a bionic manta ray robot is designed.The complex body structure is simplified while preserving the main behavioral parameters of manta rays.By controlling the two degrees of freedom of each fin,the movement state of the manta ray is more accurately reproduced.The control curve of the bionic manta ray robot and the three-dimensional model of the surface structure are established.The Adams software is used to simulate the mechanism motion(including motion,velocity and turning experiments),and the simulation is used to verify the correctness of the robot structure and motion control system. Keywords:underwater robot;bionics;manta ray;structural design;simulation experiment0引言随着海洋仿生机器人的迅猛发展,越来越多的机器人应用于海洋探测与海洋监控。
基于生物仿生的水下机器人设计实验报告一、引言水下世界充满了神秘和挑战,为了更好地探索和利用水下资源,水下机器人的研发成为了重要的研究方向。
生物仿生学为水下机器人的设计提供了新的思路和灵感,通过模仿生物在水下的运动方式、感知能力和适应环境的特性,可以设计出性能更优越、功能更强大的水下机器人。
二、实验目的本实验的目的是设计一款基于生物仿生的水下机器人,以提高其在水下的运动效率、机动性和环境适应能力。
通过对生物原型的研究和分析,将生物的优秀特性应用到水下机器人的设计中,实现更高效、更智能的水下作业。
三、生物原型选择在众多水下生物中,我们选择了鱼类作为主要的仿生对象。
鱼类经过漫长的进化,具备了出色的水下运动能力和适应能力。
其中,金枪鱼和鳗鱼的身体形态和运动方式具有较高的研究价值。
金枪鱼具有流线型的身体结构,能够减少水阻,快速游动。
其尾鳍的摆动方式高效而有力,为推进提供了强大的动力。
鳗鱼则具有灵活的身体,可以在狭窄的空间中自由穿梭,其蜿蜒的运动方式有助于在复杂的水下环境中行动。
四、设计思路(一)外形设计根据金枪鱼的流线型身体结构,设计水下机器人的外壳,减少水阻。
采用类似鳗鱼的柔软可弯曲的结构,增加机器人在狭窄空间的通过性和机动性。
(二)推进系统模仿金枪鱼的尾鳍摆动方式,设计了一套高效的推进系统。
通过电机驱动连杆机构,实现尾鳍的周期性摆动,产生推进力。
(三)感知系统借鉴鱼类的侧线感知系统,在机器人表面安装压力传感器,用于感知水流的变化和周围环境的信息。
(四)控制系统开发了基于反馈控制的算法,根据感知系统获取的信息,实时调整机器人的运动姿态和速度。
五、材料与设备(一)材料1、高强度轻质复合材料,用于制造机器人的外壳,以保证强度的同时减轻重量。
2、防水密封材料,确保机器人内部电子元件不受水的侵蚀。
(二)设备1、高性能电机和驱动器,为推进系统提供动力。
2、高精度传感器,包括压力传感器、姿态传感器等。
3、微控制器和电路板,用于控制机器人的运动和处理传感器数据。
DOI :10.15913/ki.kjycx.2024.05.009仿生水下机器人的总体设计与分析*董苏德,陈佳威,孟 巧(南通理工学院电气与能源工程学院,江苏 南通 226002)摘 要:面向海洋牧场监测工作,设计了一款仿鲨鱼型水下机器人,提出了总体设计方案,计算了水下机器人的重心浮心,利用STARCCM+软件对水下机器人的外部流场进行仿真计算,找出压强较大的部位,为后期制作和选材提供参考。
关键词:水下机器人;总体设计;STARCCM+;水动力分析中图分类号:TP24 文献标志码:A 文章编号:2095-6835(2024)05-0038-04——————————————————————————*[基金项目]江苏省大学生创新创业训练计划项目“低功耗的面向海洋牧场的智能水下航行器”(编号:202212056011Z );南通市科技计划项目(编号:JCZ21113);南通理工学院2024届“优秀毕业设计(论文)培育计划”(编号:BS202336)“海洋牧场”是指在一定海域内,采用规模化渔业设施和系统化管理体制,利用自然的海洋生态环境,将人工放流的经济海洋生物聚集起来,像在陆地放牧牛、羊一样,对鱼、虾、贝、藻等海洋资源进行有计划和有目的的海上放养[1-2]。
海洋开发必然涉及水下监测,但人的潜水作业势必要受到无氧、压力、水温等各种条件的制约。
因此,水下监测设备必将成为海洋牧场作业中的主角代替人类去直接观测生物的生活状态和生活环境,在海洋资源的开发和利用上起着不可替代的作用。
最常见的海洋观测设备有水下航行器和浮标[3-4],水下航行器可作为移动观测点,海洋浮标可进行定点监测和信号传输。
本文将结合水下航行器和海洋浮标的特点,研究和设计一款低功耗的面向海洋牧场且具备智能水下监测系统的水下航行器。
1 总体设计此水下机器人设计的目标是使其在水下能够根据需要,对海洋牧场特定区域内的生物行为进行有效控制与追踪,对生物生存环境进行高效探测与精准评估。
基于混合推进方式的水下仿生鱼机器人研究设计摘要:论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。
关键词:混合推进式;仿生;机器人设计1 水下仿生鱼机器人概述1.1 水下机器人的背景随着全球经济、科研活动的深入发展,地球的陆地资源正在逐步减少,有朝一日终将会被挖掘殆尽。
而地球表面60%以上是海洋,海洋中蕴藏着比陆地上更加丰富的自然资源。
而面对海洋这么大的面积,使用机器取代人力是必然的发展趋势。
目前机器人发展迅速,海底机器人正变得越来越重要。
1.2 仿生机器人的起源科学家们通过将仿生学和机器人两大学科相结合,提出了水下仿生机器人这一概念,水下仿生机器人根据海洋生物的外形结构和运动方式进行设计,由于海洋生物进过了长期的进化,其外形结构能够很好地适应水下的环境,因此设备运用仿生的理念能帮助人类更好地了解海洋。
美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。
研究人员于1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。
紧接着,英国赛克斯大学(Essex)就以鱼类结构为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线和转向问题。
而美国海洋学中心则是把对生物模仿得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”,按照龙虾的身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。
1.3 水下仿生鱼机器人的设计意义水下仿生鱼机器人用途广泛,涉及到各个领域。
在民用方面,通过采集水下图像可完成资源勘探、海洋生物研究、海底地势地貌绘制、海底管道检修、鱼群监测、地理研究、水质采用等等。
在军用方面,可以为水下机器人加装声呐、排雷装置等,从而执行特定的军事任务,如定点监控、海底侦查、信息传输、协同作战等等。
由此可见,水下仿生鱼机器人的设计具有很大的发展前景,如何合理地设计水下仿生鱼的外观结构,使其实现相应的功能尤为重要。
水下机器人的机械手臂设计与仿真水下机器人的机械手臂设计与仿真是水下机器人技术中的重要领域之一、水下机器人的机械手臂主要用于执行各种任务,如修复、安装、采样等。
因此,设计一款稳定、灵活、高度智能的水下机器人机械手臂对于水下机器人的有效操作至关重要。
首先,设计水下机器人的机械手臂需要考虑以下几个方面:机械结构、力学性能、控制系统和任务需求。
机械结构是机械手臂设计中最基础的部分。
考虑到水下环境的复杂性和极限工况,机械结构需要具备高强度、耐腐蚀和耐重压等特点。
同时,机械结构还需要设计为模块化结构,方便维护和升级。
力学性能是机械手臂设计中的关键因素之一、在水下环境中,机械手臂需要能够承受水压、扭矩和重力等多种负荷。
因此,材料的选择和结构的设计需要充分考虑这些负荷。
控制系统是机械手臂设计中的另一个重要因素。
水下机器人的机械手臂通常由多个关节和传感器组成,需要设计合适的控制算法和控制器。
此外,为了实现自主操作和精确控制,机械手臂的控制系统还需要具备高度智能化的功能。
任务需求是机械手臂设计的最终目标。
根据不同的任务需求,机械手臂的设计和功能各不相同。
例如,水下机器人的机械手臂用于采样任务时,需要具备高精度的抓取和定位功能;在修复任务中,机械手臂需要能承受高扭矩和扭力。
对于水下机器人机械手臂的仿真,可以使用计算机辅助设计和仿真软件。
这些软件可以提供对机械结构和力学性能的仿真分析,帮助设计人员优化设计方案。
同时,还可以通过仿真模拟机械手臂的运动和控制,验证控制系统的性能和稳定性。
总结来说,水下机器人的机械手臂设计与仿真需要从机械结构、力学性能、控制系统和任务需求等方面进行考虑和优化。
通过合理的设计和仿真分析,可以提高机械手臂的性能和可靠性,并实现水下机器人在复杂环境中的任务效能。