现代控制工程第5章能控性与能观性分析
- 格式:ppt
- 大小:1.76 MB
- 文档页数:77


现代控制理论实验报告实验一系统能控性与能观性分析一、实验目的1.理解系统的能控和可观性。
二、实验设备1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台;三、实验容二阶系统能控性和能观性的分析四、实验原理系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。
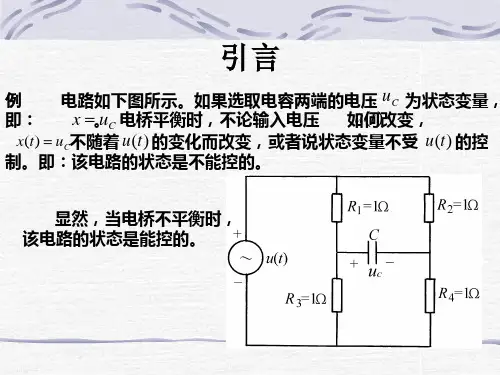
对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。
反之,当时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。
系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式:平衡时:由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。
基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。
反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。
由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω)五、实验步骤1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。
将阶跃信号发生器选择负输出。
2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。
然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。
此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。
3.将短路帽分别接到1K、3K处,重复上面的实验。

Chapter3能控性与能观性现代控制理论中,用状态空间方法描述系统,将系统的的输出输入关系分成两部分,一部分是系统的控制输入对状态的影响,由状态方程描述;另一部分是系统输出与状态的关系,由输出方程描述。
1960年,Kalman 根据“控制输入对状态的影响”首先提出了系统状态的能控性问题,根据“输出与状态的关系”提出了系统状态的能观性问题。
能控性:输入)(t u 能否通过“状态方程”引起系统任一状态)(t x i 的变化)(t xi ?能控性描述通过输入)(t u 对系统状态)(t x 的控制能力;能观性:系统任一状态)(t x i 的变化能否通过“输出方程”引起输出)(t y 的变化?或者由输出)(t y 的变化能否通过“输出方程”确定系统所有状态变量)(t xi ,能观性描述通过输出)(t y 对系统状态)(t x 的测辨能力。
3.1 系统的能控性 3.1.1 能控性的定义和性质系统能控性定义:在初始时刻0t t =时,对系统施加控制)(t u 使系统状态)(t x 发生变化,并且输出)(t y ,)()()()()(t u t B t x t A t x+= ,)()()(t x t C t y =,0t t ≥图3-1 能控性与能达性如果在有限时间a t t t ≤≤0内存在容许(满足∞<⎰at t t t u 0d )(2)的控制向量)(t u ,能使此系统从不为0的初始状态)(0t x 转移到0终态0)(=a t x ,则称状态)(t x 在),(0a t t 上是能控的,或称在时刻0t 上是能控的。
若对系统状态的任一元素均能满足上述条件,则称系统在],[0a t t 上是完全能控(简称能控)的。
而由0初态0)(0=t x ,在时间],[0a t t 内转移到任意不为0的终态0)(≠f t x 称为能达性;对于线性定常系统,能控必能达,能达必能控,二者等价。
(参见图3-1 ) 系统能控性的基本性质:状态方程的解 ⎰Φ+Φ=tt u B t x t t t x 0d )()(),(),()(00ττττ (3-1)根据定义,若状态向量是能控的,则存在容许控制)(t u ,使0d )()(),(),()(000=Φ+Φ=⎰at t a a a u B t x t t t x ττττ由此可反解出 ⎰ΦΦ-=-at t a a u B t t t t x 0d )()(),(),()(010ττττ),(01t t a -Φ与积分变量τ无关,可以放到积分号下⎰ΦΦ-=-at t a a u B t t t t x 0d )()(),(),()(010ττττ),(),(001a a t t t t Φ=Φ-(反演性),),(),(),(00ττt t t t a a Φ=ΦΦ(传递性)⎰⎰Φ-=ΦΦ-=aat t t t a a u B t u B t t t t x 0d )()(),(d )()(),(),()(000ττττττττ对线性定常系统,)(0e),(ττ-=Φt A a t上式可写成⎰⋅-=-at t t A u B t x 00d )(e )()(0τττ (3-2)3.1.2 能控性判据将τA e-写成有限和形式∑-=-=1)(n k k k A A eτατ代入(3-2)式可得kaat k n k k t A u B A u B x βτττταττ=-=-⎰∑⎰-=⋅-=]d )()([d )(e1⎪⎪⎪⎪⎪⎭⎫⎝⎛==---=∑11011)...(n n k n k k B A AB BB A ββββ若系统能控,上式就有解,所以对任意向量0x ,其充要条件是能控矩阵满秩。

《现代控制工程》目录第1章绪论1.1现代控制工程的发展1.2 本书的内容与安排第2章状态空间数学模型2.1 状态与状态空间的概念2.2 系统的状态空间模型2.2.1 建立状态空间模型的方法2.2.2 由状态空间模型求微分方程2.3 线性系统的状态空间模型与线性变换2.3.1 SISO线性系统的状态空间模型2.3.2 MIMO线性系统的状态空间模型2.3.3 状态方程的线性变换2.4 控制系统的实现2.4.1 系统的实现问题2.4.2 不含有输入导数项的微分方程的实现2.4.3 含有输入导数项的微分方程的实现2.5 多变量系统的传递矩阵2.5.1 多变量系统传递矩阵的概念2.5.2 从状态空间模型求传递矩阵2.5.3 多变量控制系统的结构图简化2.6 控制系统的状态空间模型2.7 MATLAB在状态空间模型建立中的应用2.7.1传递函数转换到状态空间模型2.7.2状态方程的线性变换2.8 本章小结习题第3章控制系统稳定性分析3.1 控制系统稳定性定义3.1.1 范数的概念3.1.2 平衡状态3.1.3 李雅普诺夫稳定性定义3.2 控制系统稳定的条件3.2.1 单变量线性定常连续系统的稳定条件3.2.2 多变量线性定常连续系统的稳定条件3.2.3 单变量线性定常离散系统的稳定条件3.2.4 多变量线性定常离散系统的稳定条件3.3 李雅普诺夫稳定判据3.3.1 函数的正定性3.3.2 非线性系统的李雅普诺夫稳定判据3.4 线性系统的李雅普诺夫稳定判据3.4.1 线性连续系统的李雅普诺夫稳定判据3.4.2 线性离散系统的李雅普诺夫稳定判据3.5 非线性系统的克拉索夫斯基稳定判据3.6 非线性系统的小偏差线性化方法3.6.1 小偏差线性化的基本思想3.6.2小偏差线性化方法3.6.3李雅普诺夫第一法3.7 MATLAB在系统稳定性分析中的应用3.8 本章小结习题第4章线性系统动态性能分析4.1 线性连续定常系统状态方程的求解4.1.1 齐次状态方程的求解4.1.2 非齐次状态方程的求解4.2 线性连续时变系统状态方程的求解4.2.1 齐次状态方程的解4.2.2 状态转移矩阵的性质4.2.3 状态转移矩阵的计算4.2.4 非齐次状态方程的解4.3 线性离散系统状态方程的求解4.3.1 齐次状态方程的解4.3.2 状态转移矩阵的性质4.3.3 状态转移矩阵的计算4.3.4线性定常离散系统非齐次状态方程的求解4.3.5线性时变离散系统状态方程的求解4.4 MATLAB在系统动态性能分析中的应用4.5 本章小结习题第5章线性系统的能控性和能观性分析5.1 能控性和能观性问题5.2 线性定常系统的能控性5.2.1 能控性的定义5.2.2 能控性判别准则5.2.3 能控性第二判别准则5.2.4 输出能控性及其判别准则5.3 线性定常系统的能观性5.3.1 能观性的定义5.3.2 能观性判别准则5.3.3 能观性第二判别准则5.4 状态空间模型的对角线标准型5.4.1 系统的特征值和特征向量5.4.2 化矩阵A为对角阵5.4.3 化矩阵A为约当阵5.4.4 特征值为复数的对角线标准型5.5 状态空间模型的能控标准型与能观标准型5.5.1 第一能控标准型5.5.2 第二能控标准型5.5.3 第一能观标准型5.5.4 第二能观标准型5.6 传递函数的几种标准型实现5.6.1 能控标准型实现5.6.2 能观标准型实现5.6.3 对角线标准型实现5.6.4 约当标准型实现5.7 对偶原理5.8 线性定常系统的规范分解5.8.1 能控性结构分解5.8.2 能观性结构分解5.8.3 系统结构的规范分解5.9 MATLAB在系统能控性和能观性分析中的应用5.9 本章小结习题第6章状态反馈控制与状态观测器设计6.1 状态反馈与输出反馈6.1.1 状态反馈6.1.2 输出反馈6.1.3状态反馈系统的能控性与能观性6.1.4 状态反馈对传递函数的影响6.2 状态反馈设计方法6.2.1 极点配置问题6.2.2 单输入系统的极点配置方法6.2.3 多输入系统的极点配置方法6.3 状态观测器设计方法6.3.1 全维状态观测器设计6.3.2 降维状态观测器设计6.4 带状态观测器的状态反馈系统的设计方法6.5 MATLAB在状态反馈与状态观测器设计中的应用6.6 本章小结习题第7章最优控制7.1 最优控制的概念7.2 变分法与泛函的极值条件7.3 变分法求解无约束最优控制问题7.4 极小值原理7.4.1 连续系统的极小值原理7.4.2 离散系统的极小值原理7.5 线性二次型最优控制7.5.1 线性二次型最优控制问题7.5.2 连续系统有限时间状态调节器7.5.3 连续系统无限时间定常状态调节器7.5.4 线性离散系统状态调节器7.5.5 线性连续系统输出调节器7.5.6 线性连续系统输出跟随器7.6 本章小结习题第8章系统辨识8.1 系统辨识的概念8.1.1 系统辩识的定义8.1.2系统辩识的基本内容8.2 线性静态模型的最小二乘参数估计8.2.1 参数估计问题8.2.2 最小二乘法的基本算法8.2.3 最小二乘法的性质8.2.4 应用举例8.3 线性动态模型的最小二乘参数估计8.4 最小二乘参数估计的递推算法8.4.1 基本递推算法8.4.2 带有遗忘因子的递推算法8.5 线性系统的结构辨识8.5.1 模型阶次的确定8.5.2 系统纯时滞的辨识8.6 闭环系统的可辨识性8.7 MATLAB在系统辨识中的应用8.8 本章小结习题第9章自适应控制9.1 自适应控制的概念9.1 自校正控制的结构9.2 最小方差控制9.3 自校正调节器9.4 自校正调节器应用实例9.5 本章小结习题第10章预测控制10.1 预测控制的基本原理10.2 动态矩阵控制10.3 炼油厂加氢裂化装置的动态矩阵控制10.4 模型算法控制10.5 催化裂化分馏塔的模型算法控制10.6 广义预测控制10.7 本章小结习题第11章模糊控制11.1 模糊控制的发展11.2 模糊集合11.2.1 模糊集合的定义11.2.2模糊集合的表示方法11.2.3 模糊集合的运算11.3 模糊控制系统的组成11.3.1模糊控制系统的结构11.3.2 模糊控制器的输入输出变量11.3.3 模糊控制器的输入输出变量的模糊化11.4 模糊控制规则11.5 模糊关系与合成11.5.1 模糊关系11.5.2 模糊关系的合成11.6 模糊推理与模糊决策11.6.1 模糊推理11.6.2模糊决策11.7 模糊控制算法的工程实现11.8 模糊PID复合控制11.9 酚醛树脂聚合反应温度模糊控制11.9.1 酚醛树脂聚合反应过程特性分析11.9.2 模糊控制器设计11.10 全自动洗衣机的模糊控制11.10.1 模糊控制洗衣机的检测11.10.2 洗衣机的模糊控制11.11 本章小结习题第12章专家系统与专家控制12.1 专家系统12.1.1 专家系统的概念12.1.2专家系统的一般结构12.1.3 实时专家系统12.2 专家控制系统12.2.1 专家控制系统的概念12.2.2 间接专家控制12.2.3 直接专家控制12.3 专家控制系统的知识表示12.3.1 知识表示12.3.2 产生式知识表示12.3.3 产生式系统12.3.4 动物识别专家系统12.4 专家控制系统的推理机12.5 专家控制系统的搜索技术12.6 电脑充绒机专家控制系统12.6.1电脑充绒机的工作原理12.6.2高性能称重传感器设计12.6.3电脑充绒机的程序控制12.6.4充绒机羽绒重量专家控制12.7 本章小结习题第13章神经网络控制13.1 神经网络控制概述13.2 神经元与神经网络13.2.1生物神经元结构13.2.2 神经元数学模型13.2.3 神经网络的结构与工作方式13.2.4 神经网络的学习13.3 BP神经网络及其学习算法13.3.1 BP神经网络的结构13.3.2 BP学习算法13.3.3 BP学习算法的实现13.4 基于神经网络的系统辨识方法13.4.1前向模型辨识13.4.2反向模型辨识13.5 基于神经网络的软测量方法13.5.1 软测量技术13.5.2 污水处理过程神经网络软测量模型13.6 基于神经网络的控制方法13.6.1 神经网络控制器13.6.2 神经网络预测控制13.6.3 神经网络模型参考控制13.6.4 神经网络内模控制13.7 单神经元控制器13.8 本章小结习题习题解答参考文献。
第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--=23111=⎥⎦⎤⎢⎣⎡--=cc Urank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kxr u -=求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k sbK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A AA f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发) 求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s sss s s U s Y[]xy u x x10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K[][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab b P⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P[]1316~==P K K【解】:依据系统传递函数写出能控标准型sss s s s s U s Y 2310)2)(1(10)()(23++=++=[]xy u x x0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。