第1章+机设学-绪论
- 格式:ppt
- 大小:3.58 MB
- 文档页数:44

Chp.1绪论基本要求(1)了解机械工程控制论的基本含义和研究对象,学习本课程的目的和任务;掌握广义系统动力学方程的含义。
(2)了解系统、广义系统的概念,了解系统的基本特性;了解系统动态模型和静态模型之间的关系。
(3)掌握反馈的含义,学会分析动态系统内信息流动的过程,掌握系统或过程中存在的反馈。
(4)了解广义系统的几种分类方法;掌握闭环控制系统的工作原理、组成;学会绘制控制系统的方框图。
(5)了解控制系统中基本名词和基本变量。
(6)了解正反馈、负反馈、内反馈、外反馈的概念。
(7)了解对控制系统的基本要求。
重点与难点本章重点(1)学会用系统论、信息论的观点分析广义系统的动态特性、信息流,理解信息反馈的含义及其作用。
(2)掌握控制系统的基本概念、基本变量、基本组成和工作原理;绘制控制系统方框图。
本章难点广义系统的信息反馈及控制系统方框图的绘制。
一、课程简介性质:机械设计制造及其自动化专业的一门技术基础课。
学时:32h先修课程:复变函数、机械动力学、交流电路理论后续课程:为专业基础和专业课打下一定基础。
如:机械工程测试技术、机电传动控制、数控机床等。
主要内容:本课程是数理基础课与专业课程之间的桥梁。
主要内容包括:控制理论的研究对象与任务、物理系统数学模型建立、时间响应分析、频率特性分析、系统的稳定性、系统的性能分析与校正、系统辩识、控制系统的计算机辅助分析.教材:杨叔子主编,《机械工程控制基础》,华中科技大学出版社,2004参考书目:(1)Katsuhiko Ogata.卢伯英等译,现代控制工程(第四版).北京:电子工业出版社,2003(2)李友善主编:《自动控制原理》,国防工业出版社,2003教材结构:1)对研究对象(机械工程)问题建立数学模型chp.22) 在一定输入下分析系统的输出:时间响应(时域分析)chp.3频率响应(频率分析)chp.43)系统性能分析:稳定性判据chp.54)系统校正:使系统全面满足性能指标要求chp.6二、对象与任务控制论+工程技术→工程控制论控制论+机械工程→机械工程控制研究对象:研究广义系统在一定外界条件下,从系统初始条件出发的整个动态过程,以及在这个历程中和历程结束后所表现出来的动态特性和静态特性。




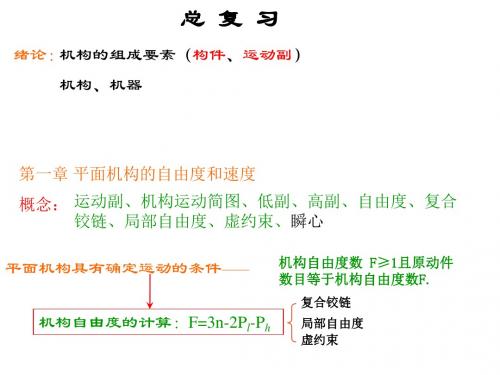
绪论构件:独立影响机构功能并能独立运动的单元体 (实物、刚体、运动的整体) 零件:加工的制造单元体 通用零件、专用零件零件和构件的关系:构件,是基本运动元件;零件,是基本制造元件。
构件由零件组成。
构件可以由一个零件组成 也可以由几个零件组成构件和机构的关系:两个或两个以上的构件通过活动联接以实现规定运动的构件组合。
机构和机器的区别:1 机构只是一个构件系统,而机器除了构件系统之外,还包括电气、液压等其它装置。
2 机构只用于传递运动和力机器除用于传递运动和力,还具有变换或传递能量、物料、信息的功能。
机械设计基础—第1章平面机构的自由度和速度分析与动力源组合机器的组成(从运动观点看)由构件组成(从制造观点看)由零件组成机械机器机构构件零件通用零件专用零件{{原动构件从动构件机架}零件构件机构机器静联接动联接(运动副)机构的特征:机构是一种人为的实物构件的组合。
机构各部分之间具有确定的相对运动。
机器的特征:机器具备机构的特征外,还必须具备第三个特征:实现能量转换或完成有效的机械功机械原理多媒体教学——绪论◆机器的组成动力系统传动系统控制系统执行系统辅助系统,例如:润滑、显示、照明等第一章自由度:把构件相对于参考系具有的独立运动参数的数目称为自由度。
结论:一个作平面运动的自由构件有三个自由度。
运动副: 两构件直接接触而形成的可动联接两种分类:机械设计基础—第1章平面机构的自由度和速度分析按接触形式分类:接触形式:点、线、面 低副:面接触高副:点、线接触平面低副空间低副xyo高副高副空间低副平面低副平面低副按相对运动分类:转动副:相对转动 ——回转副(铰链) 移动副:相对移动 螺旋副:螺旋运动 球面副:球面运动运动副特性:运动副一经形成, 组成它的两个构件间的可能的相对运动就确定。
而且这种可能的相对运动, 只与运动副类型有关, 而与运动副的具体结构无关。
工程上常用一些规定的符号代表运动副机械设计基础—第1章平面机构的自由度和速度分析平面副低副:转动副、移动副(面接触)高副:齿轮副、凸轮副(点、线接触)xyoxyott nnnt更多的机构运动简图中的运动副的表示见 课本第8页。