3非线性方程matlab计算方法
- 格式:ppt
- 大小:1.57 MB
- 文档页数:45
Matlab中的非线性优化和非线性方程求解技巧在科学和工程领域中,我们经常会遇到一些复杂的非线性问题,例如最优化问题和方程求解问题。
解决这些问题的方法主要分为线性和非线性等,其中非线性问题是相对复杂的。
作为一种强大的数值计算工具,Matlab提供了许多专门用于解决非线性优化和非线性方程求解的函数和方法。
本文将介绍一些常用的Matlab中的非线性优化和非线性方程求解技巧。
非线性优化是指在给定一些约束条件下,寻找目标函数的最优解的问题。
在实际应用中,往往需要根据实际情况给出一些约束条件,如等式约束和不等式约束。
Matlab中的fmincon函数可以用于求解具有约束条件的非线性优化问题。
其基本语法如下:[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub)其中,fun是目标函数,x0是初始值,A、b是不等式约束矩阵和向量,Aeq、beq是等式约束矩阵和向量,lb、ub是变量的上下边界。
x表示最优解,而fval表示最优解对应的目标函数值。
另外,非线性方程求解是指寻找使得方程等式成立的变量值的问题。
Matlab中提供的fsolve函数可以用于求解非线性方程。
其基本语法如下:x = fsolve(fun,x0)其中,fun是方程函数,x0是初始值,x表示方程的解。
除了fmincon和fsolve函数之外,Matlab还提供了一些其他的非线性优化和非线性方程求解函数,例如lsqnonlin、fminunc等,这些函数分别适用于无约束非线性优化问题和带约束非线性方程求解问题。
除了直接调用这些函数外,Matlab还提供了一些可视化工具和辅助函数来帮助我们更好地理解和解决非线性问题。
例如,使用Matlab的优化工具箱可以实现对非线性优化问题的求解过程可视化,从而更直观地观察到优化算法的收敛过程。
此外,Matlab还提供了一些用于计算梯度、雅可比矩阵和海塞矩阵的函数,这些函数在求解非线性问题时非常有用。
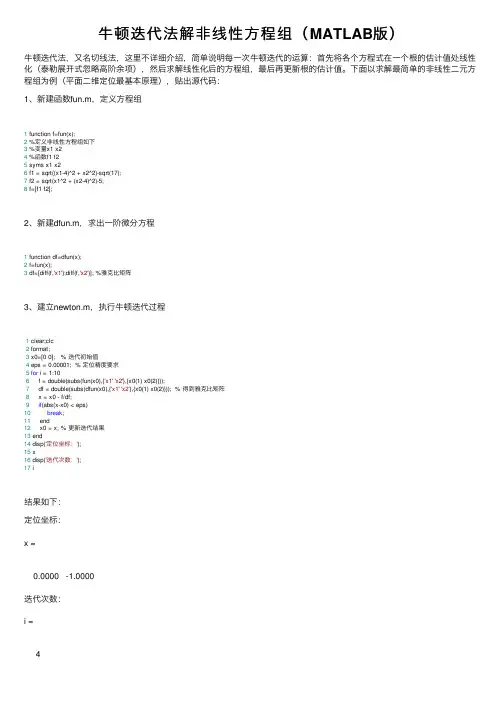
⽜顿迭代法解⾮线性⽅程组(MATLAB版)⽜顿迭代法,⼜名切线法,这⾥不详细介绍,简单说明每⼀次⽜顿迭代的运算:⾸先将各个⽅程式在⼀个根的估计值处线性化(泰勒展开式忽略⾼阶余项),然后求解线性化后的⽅程组,最后再更新根的估计值。
下⾯以求解最简单的⾮线性⼆元⽅程组为例(平⾯⼆维定位最基本原理),贴出源代码:1、新建函数fun.m,定义⽅程组1 function f=fun(x);2 %定义⾮线性⽅程组如下3 %变量x1 x24 %函数f1 f25 syms x1 x26 f1 = sqrt((x1-4)^2 + x2^2)-sqrt(17);7 f2 = sqrt(x1^2 + (x2-4)^2)-5;8 f=[f1 f2];2、新建dfun.m,求出⼀阶微分⽅程1 function df=dfun(x);2 f=fun(x);3 df=[diff(f,'x1');diff(f,'x2')]; %雅克⽐矩阵3、建⽴newton.m,执⾏⽜顿迭代过程1 clear;clc2 format;3 x0=[0 0]; % 迭代初始值4 eps = 0.00001; % 定位精度要求5for i = 1:106 f = double(subs(fun(x0),{'x1''x2'},{x0(1) x0(2)}));7 df = double(subs(dfun(x0),{'x1''x2'},{x0(1) x0(2)})); % 得到雅克⽐矩阵8 x = x0 - f/df;9if(abs(x-x0) < eps)10break;11 end12 x0 = x; % 更新迭代结果13 end14 disp('定位坐标:');15 x16 disp('迭代次数:');17 i结果如下:定位坐标:x =0.0000 -1.0000迭代次数:i =4。
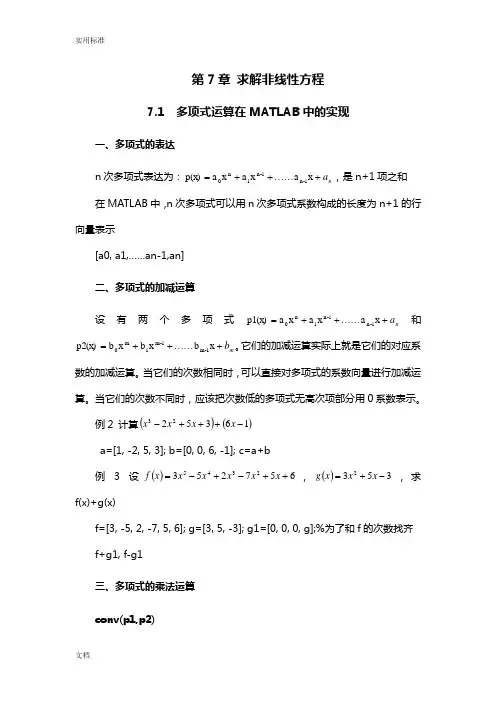
第7章 求解非线性方程7.1 多项式运算在MATLAB 中的实现一、多项式的表达n 次多项式表达为:n a +⋯⋯++=x a x a x a p(x )1-n 1-n 1n 0,是n+1项之和在MATLAB 中,n 次多项式可以用n 次多项式系数构成的长度为n+1的行向量表示[a0, a1,……an-1,an]二、多项式的加减运算设有两个多项式n a +⋯⋯++=x a x a x a p1(x )1-n 1-n 1n 0和m b +⋯⋯++=x b x b x b p2(x )1-m 1-m 1m 0。
它们的加减运算实际上就是它们的对应系数的加减运算。
当它们的次数相同时,可以直接对多项式的系数向量进行加减运算。
当它们的次数不同时,应该把次数低的多项式无高次项部分用0系数表示。
例2 计算()()1635223-+++-x x x xa=[1, -2, 5, 3]; b=[0, 0, 6, -1]; c=a+b例 3 设()6572532345++-+-=x x x x x x f ,()3532-+=x x x g ,求f(x)+g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3]; g1=[0, 0, 0, g];%为了和f 的次数找齐 f+g1, f-g1三、多项式的乘法运算conv(p1,p2)例4 在上例中,求f(x)*g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3];conv(f, g)四、多项式的除法运算[Q, r]=deconv(p1, p2)表示p1除以p2,给出商式Q(x),余式r(x)。
Q,和r 仍为多项式系数向量 例4 在上例中,求f(x)/g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3];[Q, r]=deconv(f, g)五、多项式的导函数p=polyder(P):求多项式P 的导函数p=polyder(P ,Q):求P ·Q 的导函数[p,q]=polyder(P ,Q):求P/Q 的导函数,导函数的分子存入p ,分母存入q 。
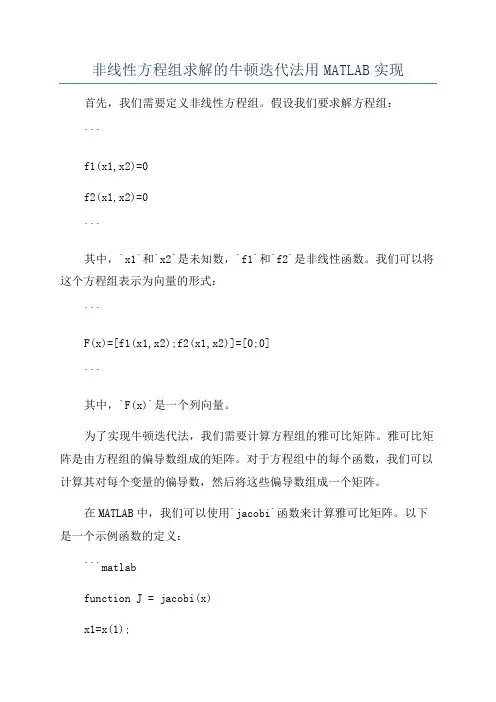
非线性方程组求解的牛顿迭代法用MATLAB实现首先,我们需要定义非线性方程组。
假设我们要求解方程组:```f1(x1,x2)=0f2(x1,x2)=0```其中,`x1`和`x2`是未知数,`f1`和`f2`是非线性函数。
我们可以将这个方程组表示为向量的形式:```F(x)=[f1(x1,x2);f2(x1,x2)]=[0;0]```其中,`F(x)`是一个列向量。
为了实现牛顿迭代法,我们需要计算方程组的雅可比矩阵。
雅可比矩阵是由方程组的偏导数组成的矩阵。
对于方程组中的每个函数,我们可以计算其对每个变量的偏导数,然后将这些偏导数组成一个矩阵。
在MATLAB中,我们可以使用`jacobi`函数来计算雅可比矩阵。
以下是一个示例函数的定义:```matlabfunction J = jacobi(x)x1=x(1);x2=x(2);J = [df1_dx1, df1_dx2; df2_dx1, df2_dx2];end```其中,`x`是一个包含未知数的向量,`df1_dx1`和`df1_dx2`是`f1`对`x1`和`x2`的偏导数,`df2_dx1`和`df2_dx2`是`f2`对`x1`和`x2`的偏导数。
下一步是实现牛顿迭代法。
牛顿迭代法的迭代公式为:```x(k+1)=x(k)-J(x(k))\F(x(k))```其中,`x(k)`是第`k`次迭代的近似解,`\`表示矩阵的求逆操作。
在MATLAB中,我们可以使用如下代码来实现牛顿迭代法:```matlabfunction x = newton_method(x_initial)max_iter = 100; % 最大迭代次数tol = 1e-6; % 收敛阈值x = x_initial; % 初始解for k = 1:max_iterF=[f1(x(1),x(2));f2(x(1),x(2))];%计算F(x)J = jacobi(x); % 计算雅可比矩阵 J(x)delta_x = J \ -F; % 计算增量 delta_xx = x + delta_x; % 更新 xif norm(delta_x) < tolbreak; % 达到收敛条件,停止迭代endendend```其中,`x_initial`是初始解的向量,`max_iter`是最大迭代次数,`tol`是收敛阈值。
数学实验报告Matlab的简单应用——非线性方程(组)求解姓名班级学号学院2013年5月12日一、实验目的1.熟悉MATLAB软件中非线性方程(组)的求解命令及其用法。
2.掌握求非线性方程近似根的常用数值方法——迭代法。
3.了解分叉与混沌概念。
二、实验问题1.利用弦截法编程对方程x^5+x-1=0进行求解实验,并与二分法、牛顿切线法进行比较;2.方程f(x)=x^2+x-4=0在(0,4)内有唯一的实根,现构造以下三种迭代函数:(1)g1(x)=4-x^2,迭代初值x0=4;(2)g2(x)=4/(1+x),迭代初值x0=4;(3)g3(x)=x-(x^2+x-4)/(2x+1),迭代初值x0=4;分别用给出的3种迭代函数构造迭代数列x(k+1)=g1(x(k)),i=1,2,3,观察这些迭代数列是否收敛,若收敛能否收敛到方程f(x)=0的解。
除此之外,你还能构造出其他收敛的迭代吗?4.分别取不同的参数值r,做迭代数列x(n+1)=rx(n)(1-x(n)),n=0,1,2……,观察分叉与混沌现象。
步骤1:首先,分别取参数r为0,0.3,0.6,0.9,1.2,1.5,1.8,2.1,2.4,2.7, 3.0,3.3,3.6,3.9等14个值,按迭代序列迭代150步,分别产生14个迭代序列{x(k)},k=0,1,…,150;其次,分别取这14个迭代序列的后50个迭代值(x100,x101,…,x150),画在以r为横坐标的同一坐标面rox上,每一个r取值对应的迭代值点为一列。
步骤2:对(1)中图进行观察分析,容易发现:(1)当r为0,0.3,0.6,0.9,1.2,1.5,1.8,2.1,2.4,2.7时,每个r对应的50个迭代值凝聚在一点,这说明对这些r的取值所产生的迭代序列是收敛的。
(2)当r为3,3.3时,r对应的50个迭代值凝聚在两个点,这说明这些r值所对应的迭代序列不收敛,但凝聚在两个点附近;同时也说明当r在2.7和3之间取值时,对应的迭代序列从收敛到不收敛,轨道由一只分为两支开始出现分叉现象。
数值分析中求解非线性方程的MATLAB求解程序1. fzero函数:fzero函数是MATLAB中最常用的求解非线性方程的函数之一、它使用了割线法、二分法和反复均值法等多种迭代算法来求解方程。
使用fzero函数可以很方便地求解单变量非线性方程和非线性方程组。
例如,要求解方程f(x) = 0,可以使用以下语法:``````2. fsolve函数:fsolve函数是MATLAB中求解多维非线性方程组的函数。
它是基于牛顿法的迭代算法来求解方程组。
使用fsolve函数可以非常方便地求解非线性方程组。
例如,要求解方程组F(x) = 0,可以使用以下语法:``````3. root函数:root函数是MATLAB中求解非线性方程组的函数之一、它采用牛顿法或拟牛顿法来求解方程组。
使用root函数可以非常方便地求解非线性方程组。
例如,要求解方程组F(x) = 0,可以使用以下语法:``````4. vpasolve函数:vpasolve函数是MATLAB中求解符号方程的函数。
它使用符号计算的方法来求解方程,可以得到精确的解。
vpasolve函数可以求解多变量非线性方程组和含有符号参数的非线性方程。
例如,要求解方程组F(x) = 0,可以使用以下语法:```x = vpasolve(F(x) == 0, x)```vpasolve函数会返回方程组的一个精确解x。
5. fsolve和lsqnonlin结合:在MATLAB中,可以将求解非线性方程转化为求解最小二乘问题的形式。
可以使用fsolve函数或lsqnonlin函数来求解最小二乘问题。
例如,要求解方程f(x) = 0,可以将其转化为最小二乘问题g(x) = min,然后使用fsolve或lsqnonlin函数来求解。
具体使用方法可以参考MATLAB官方文档。
6. Newton-Raphson法手动实现:除了使用MATLAB中的函数来求解非线性方程,还可以手动实现Newton-Raphson法来求解。
第五讲非线性方程求根及其MATLAB实现一、引言在数学和工程领域中,非线性方程的求解是一项基本任务。
非线性方程通常不具备直接求解的方法,因此需要采用迭代方法来逼近其解。
本讲将介绍几种常用的非线性方程求根方法,并给出MATLAB实现的示例。
二、二分法二分法是一种简单但有效的求根方法。
其基本思想是将方程的根所在的区间进行逐步划分,并选择其中点作为迭代的点,直到满足精度要求。
具体实现如下:```matlabfunction x = bisection(f, a, b, tol)if f(a) * f(b) >= 0error('f(a)和f(b)符号相同');endwhile (b - a) / 2 > tolx=(a+b)/2;if f(x) == 0break;elseif f(a) * f(x) < 0b=x;elsea=x;endendend```三、牛顿法牛顿法是一种基于方程导数的迭代方法,其基本思想是使用方程的切线来逼近其根。
具体实现如下:```matlabfunction x = newton(f, df, x0, tol)while abs(f(x0)) > tolx0 = x0 - f(x0) / df(x0);endx=x0;end```四、割线法割线法是一种类似于牛顿法的迭代方法,其基本思想是用两个迭代点的连线来逼近方程的根。
具体实现如下:```matlabfunction x = secant(f, x0, x1, tol)while abs(f(x1)) > tolx=x1-f(x1)*(x1-x0)/(f(x1)-f(x0));x0=x1;x1=x;endend```五、MATLAB实现示例下面是一些使用上述非线性方程求根方法的MATLAB示例:```matlab% 示例1:求方程sin(x) = 0的根a=0;b = 2 * pi;tol = 1e-6;x = bisection(f, a, b, tol);disp(['二分法求解的根为:', num2str(x)]);disp(['牛顿法求解的根为:', num2str(x)]);x = secant(f, a, b, tol);disp(['割线法求解的根为:', num2str(x)]);%示例2:求方程x^2-2=0的根x0=1;tol = 1e-6;x = newton(f, df, x0, tol);disp(['牛顿法求解的根为:', num2str(x)]);```六、总结本讲介绍了几种常用的非线性方程求根方法,并给出了MATLAB的实现示例。

Matlab⾮线性⽅程数值解法实验⽬的⽤Matlab实现⾮线性⽅程的⼆分法、不动点迭代法实验要求1. 给出⼆分法算法和不动点迭代算法2. ⽤Matlab实现⼆分法3. ⽤Matlab实现不动点迭代法实验内容(1)在区间[0,1]上⽤⼆分法和不动点迭代法求的根到⼩数点后六位。
(2)⼆分法的基本思想:逐步⼆分区间[a,b],通过判断两端点函数值的符号,进⼀步缩⼩有限区间,将有根区间的长度缩⼩到充分⼩,从⽽,求得满⾜精度要求的根的近似值。
(3)不动点迭代法基本思想:已知⼀个近似根,构造⼀个递推关系(迭代格式),使⽤这个迭代格式反复校正根的近似值,计算出⽅程的⼀个根的近似值序列,使之逐步精确法,直到满⾜精度要求(该序列收敛于⽅程的根)。
实验步骤(1)⼆分法算法与MATLAB程序(⼆分法的依据是根的存在性定理,更深地说是介值定理)。
MATLAB程序,1 %⼆分法2 %输⼊:f(x)=0的f(x),[a,b]的a,b,精度ep3 %输出:近似根root,迭代次数k4 function [root,k]=bisect(fun,a,b,ep)5if nargin>36 elseif nargin<47 ep=1e-5;%默认精度8else9 error('输⼊参数不⾜');%输⼊参数必须包括f(x)和[a,b]10 end11if fun(a)*fun(b)>0%输⼊的区间要求12 root=[fun(a),fun(b)];13 k=0;14return;15 end16 k=1;17while abs(b-a)/2>ep%精度要求18 mid=(a+b)/2;%中点19if fun(a)*fun(mid)<020 b=mid;21 elseif fun(a)*fun(mid)>022 a=mid;23else24 a=mid;b=mid;25 end26 k=k+1;27 end28 root=(a+b)/2;29 end⼆分法1运⾏⽰例(并未对输出格式做控制,由于精度要求,事后有必要控制输出的精度):优化代码,减⼩迭代次数(在迭代前,先搜寻更适合的有根区间)1 %⼆分法改良2 %在⼀开始给定的区间中寻找更⼩的有根区间3 %输⼊:f(x)=0的f(x),[a,b]的a,b,精度ep4 %输出:近似根root,迭代次数k5 %得到的根是优化区间⾥的最⼤根6 function [root,k]=bisect3(fun,a,b,ep)7if nargin>38 elseif nargin<49 ep=1e-5;%默认精度10else11 error('输⼊参数不⾜');%输⼊参数必须包括f(x)和[a,b]12 end13 %定义划分区间的分数14 divQJ=1000;15 %等分区间16 tX=linspace(a,b,divQJ);17 %计算函数值18 tY=fun(tX);19 %找到函数值的正负变化的位置20 locM=find(tY<0);21 locP=find(tY>0);22 %定义新区间23if tY(1)<024 a=tX(locM(end));25 b=tX(locP(1));26else27 a=tX(locP(end));28 b=tX(locM(1));29 end30if fun(a)*fun(b)>0%输⼊的区间要求31 root=[fun(a),fun(b)];32 k=0;33return;34 end35 k=1;36while abs(b-a)/2>ep%精度要求37 mid=(a+b)/2;%中点38if fun(a)*fun(mid)<039 b=mid;40 elseif fun(a)*fun(mid)>041 a=mid;42else43 a=mid;b=mid;44 end45 k=k+1;46 end47 root=(a+b)/2;48 end⼆分法2运⾏⽰例(同样没有控制输出)明显地,迭代次数减⼩许多。
非线性方程组求解1.mulStablePoint用不动点迭代法求非线性方程组的一个根function [r,n]=mulStablePoint(F,x0,eps)%非线性方程组:f%初始解:a%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-6;endx0 = transpose(x0);n=1;tol=1;while tol>epsr= subs(F,findsym(F),x0); %迭代公式tol=norm(r-x0); %注意矩阵的误差求法,norm为矩阵的欧几里德范数n=n+1;x0=r;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend2.mulNewton用牛顿法法求非线性方程组的一个根function [r,n]=mulNewton(F,x0,eps)if nargin==2eps=1.0e-4;endx0 = transpose(x0);Fx = subs(F,findsym(F),x0);var = findsym(F);dF = Jacobian(F,var);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx;n=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx; %核心迭代公式tol=norm(r-x0);n=n+1;if(n>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend3.mulDiscNewton用离散牛顿法法求非线性方程组的一个根function [r,m]=mulDiscNewton(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=transpose(x0)-inv(J)*fx;m=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;4.mulMix用牛顿-雅可比迭代法求非线性方程组的一个根function [r,m]=mulMix(F,x0,h,l,eps)if nargin==4eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = transpose(x0)-dr; m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend5.mulNewtonSOR用牛顿-SOR迭代法求非线性方程组的一个根function [r,m]=mulNewtonSOR(F,x0,w,h,l,eps)if nargin==5eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = transpose(x0)-dr;m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend6.mulDNewton用牛顿下山法求非线性方程组的一个根function [r,m]=mulDNewton(F,x0,eps)%非线性方程组:F%初始解:x0%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-4;endx0 = transpose(x0);dF = Jacobian(F);m=1;tol=1;while tol>epsttol=1;w=1;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);F1=norm(Fx);while ttol>=0 %下面的循环是选取下山因子w的过程r=x0-w*inv(dFx)*Fx; %核心的迭代公式Fr = subs(F,findsym(F),r);ttol=norm(Fr)-F1;w=w/2;endtol=norm(r-x0);m=m+1;x0=r;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend7.mulGXF1用两点割线法的第一种形式求非线性方程组的一个根function [r,m]=mulGXF1(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;8.mulGXF2用两点割线法的第二种形式求非线性方程组的一个根function [r,m]=mulGXF2(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;9.mulVNewton用拟牛顿法求非线性方程组的一组解function [r,m]=mulVNewton(F,x0,A,eps)%方程组:F%方程组的初始解:x0% 初始A矩阵:A%解的精度:eps%求得的一组解:r%迭代步数:mif nargin==2A=eye(length(x0)); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendx0 = transpose(x0);Fx = subs(F, findsym(F),x0);r=x0-A\Fx;m=1;tol=1;while tol>epsx0=r;Fx = subs(F, findsym(F),x0);r=x0-A\Fx;y=r-x0;Fr = subs(F, findsym(F),r);z= Fr-Fx;A1=A+(z-A*y)*transpose(y)/norm(y); %调整A A=A1;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end10.mulRank1用对称秩1算法求非线性方程组的一个根function [r,n]=mulRank1(F,x0,A,eps)if nargin==2l = length(x0);A=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-inv(A)*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-inv(A)*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;A1=A+ fr *transpose(fr)/(transpose(fr)*y); %调整A A=A1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end11.mulDFP用D-F-P算法求非线性方程组的一组解function [r,n]=mulDFP(F,x0,A,eps)if nargin==2l = length(x0);B=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;B1=B+ y*y'/(y'*z)-B*z*z'*B/(z'*B*z); %调整AB=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end12.mulBFS用B-F-S算法求非线性方程组的一个根function [r,n]=mulBFS(F,x0,B,eps)if nargin==2l = length(x0);B=eye(l); %B取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;u = 1 + z'*B*z/(y'*z);B1= B+ (u*y*y'-B*z*y'-y*z'*B)/(y'*z); %调整B B=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end13.mulNumYT用数值延拓法求非线性方程组的一组解function [r,m]=mulNumYT(F,x0,h,N,eps)format long;if nargin==4eps=1.0e-8;endn = length(x0);fx0 = subs(F,findsym(F),x0);x0 = transpose(x0);J = zeros(n,n);for k=0:N-1fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endinJ = inv(J);r=x0-inJ*(fx-(1-k/N)*fx0);x0 = r;endm=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;14.DiffParam1用参数微分法中的欧拉法求非线性方程组的一组解function r=DiffParam1(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);for k=1:NFx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endinJ = inv(J);r = x0 - ht*inJ*Fx0;x0 = r;end15.DiffParam2用参数微分法中的中点积分法求非线性方程组的一组解function r=DiffParam2(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nxt = x0;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx0)/h(i);endinJ = inv(J);x1 = x0 - ht*inJ*Fx0;for k=1:Nx2 = x1 + (x1-x0)/2;Fx2 = subs(F,findsym(F),x2);J = zeros(n,n);for i=1:nxt = x2;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx2)/h(i);endinJ = inv(J);r = x1 - ht*inJ*Fx0;x0 = x1;x1 = r;end16.mulFastDown用最速下降法求非线性方程组的一组解function [r,m]=mulFastDown(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0-J*lamda; %核心迭代公式fr = subs(F,findsym(F),r);tol=dot(fr,fr);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;17.mulGSND用高斯牛顿法求非线性方程组的一组解function [r,m]=mulGSND(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endDF = inv(transpose(J)*J)*transpose(J);r=x0-DF*fx; %核心迭代公式tol=norm(r-x0);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;18.mulConj用共轭梯度法求非线性方程组的一组解function [r,m]=mulConj(F,x0,h,eps)format long;if nargin==3eps=1.0e-6;endn = length(x0);x0 = transpose(x0);fx0 = subs(F,findsym(F),x0);p0 = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)*(1+h);p0(:,i) = -(subs(F,findsym(F),x1)-fx0)/h;endm=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0+p0*lamda; %核心迭代公式fr = subs(F,findsym(F),r);Jnext = zeros(n,n);for i=1:nx1 = r;x1(i) = x1(i)+h;Jnext(:,i) = (subs(F,findsym(F),x1)-fr)/h;endabs1 = transpose(Jnext)*Jnext;abs2 = transpose(J)*J;v = abs1/abs2;if (abs(det(v)) < 1)p1 = -Jnext+p0*v;elsep1 = -Jnext;endtol=norm(r-x0);p0 = p1;x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;19.mulDamp用阻尼最小二乘法求非线性方程组的一组解function [r,m]=mulDamp(F,x0,h,u,v,eps)format long;if nargin==5eps=1.0e-6;endFI = transpose(F)*F/2;n = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsj = 0;fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;afx = subs(F,findsym(F),x1);J(:,i) = (afx-fx)/h;endFIx = subs(FI,findsym(FI),x0);for i=1:nx2 = x0;x2(i) = x2(i)+h;gradFI(i,1) = (subs(FI,findsym(FI),x2)-FIx)/h;ends=0;while s==0A = transpose(J)*J+u*eye(n,n);p = -A\gradFI;r = x0 + p;FIr = subs(FI,findsym(FI),r);if FIr<FIxif j == 0u = u/v;j = 1;elses=1;endelseu = u*v;j = 1;if norm(r-x0)<epss=1;endendendx0 = r;tol = norm(p);m=m+1;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endendformat short;。
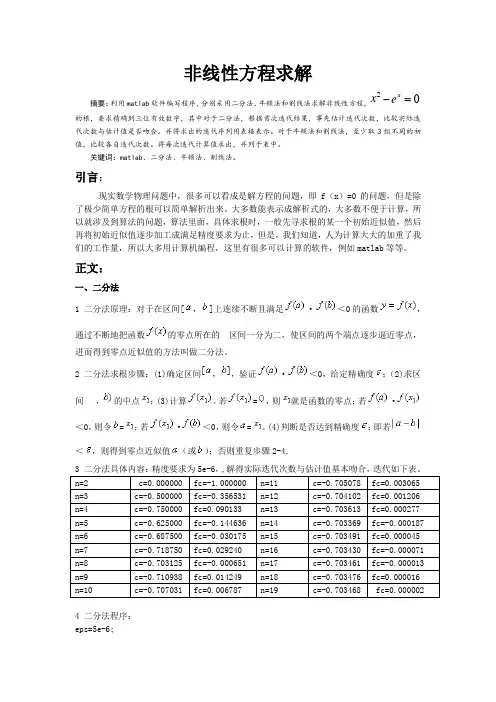
非线性方程求解摘要:利用matlab软件编写程序,分别采用二分法、牛顿法和割线法求解非线性方程,0 2= -x ex的根,要求精确到三位有效数字,其中对于二分法,根据首次迭代结果,事先估计迭代次数,比较实际迭代次数与估计值是否吻合。
并将求出的迭代序列用表格表示。
对于牛顿法和割线法,至少取3组不同的初值,比较各自迭代次数。
将每次迭代计算值求出,并列于表中。
关键词:matlab、二分法、牛顿法、割线法。
引言:现实数学物理问题中,很多可以看成是解方程的问题,即f(x)=0的问题,但是除了极少简单方程的根可以简单解析出来。
大多数能表示成解析式的,大多数不便于计算,所以就涉及到算法的问题,算法里面,具体求根时,一般先寻求根的某一个初始近似值,然后再将初始近似值逐步加工成满足精度要求为止,但是,我们知道,人为计算大大的加重了我们的工作量,所以大多用计算机编程,这里有很多可以计算的软件,例如matlab等等。
正文:一、二分法1 二分法原理:对于在区间[,]上连续不断且满足·<0的函数,通过不断地把函数的零点所在的区间一分为二,使区间的两个端点逐步逼近零点,进而得到零点近似值的方法叫做二分法。
2 二分法求根步骤:(1)确定区间,,验证·<0,给定精确度;(2)求区间,的中点;(3)计算。
若=,则就是函数的零点;若·<0,则令=;若·<0,则令=。
(4)判断是否达到精确度;即若<,则得到零点近似值(或);否则重复步骤2-4.3 二分法具体内容:精度要求为5e-6,,解得实际迭代次数与估计值基本吻合,迭代如下表。
n=2 c=0.000000 fc=-1.000000 n=11 c=-0.705078 fc=0.003065 n=3 c=-0.500000 fc=-0.356531 n=12 c=-0.704102 fc=0.001206 n=4 c=-0.750000 fc=0.090133 n=13 c=-0.703613 fc=0.000277 n=5 c=-0.625000 fc=-0.144636 n=14 c=-0.703369 fc=-0.000187 n=6 c=-0.687500 fc=-0.030175 n=15 c=-0.703491 fc=0.000045 n=7 c=-0.718750 fc=0.029240 n=16 c=-0.703430 fc=-0.000071 n=8 c=-0.703125 fc=-0.000651 n=17 c=-0.703461 fc=-0.000013 n=9 c=-0.710938 fc=0.014249 n=18 c=-0.703476 fc=0.000016n=10 c=-0.707031 fc=0.006787 n=19 c=-0.703468 fc=0.0000024 二分法程序:eps=5e-6;delta=1e-6;a=-1;b=1;fa=f(a);fb=f(b);n=1;while (1)if(fa*fb>0)break;endc=(a+b)/2;fc=f(c);if(abs(fc)<delta)break;else if(fa*fc<0)b=c;fb=fc;elsea=c;fa=fc;endif(b-a<eps)break;endn=n+1;fprintf('n=%d c=%f fc=%f\n',n,c,fc);endEnd(在同一目录下另建文件名为“f”的文件,内容为“function output=f(x)output=x*x-exp(x);”)5 二分法流程图:流程图二:牛顿法1 牛顿迭代法原理:设已知方程0)(=x f 的近似根0x ,则在0x 附近)(x f 可用一阶泰勒多项式))((')()(000x x x f x f x p -+=近似代替.因此, 方程0)(=x f 可近似地表示为0)(=x p .用1x 表示0)(=x p 的根,它与0)(=x f 的根差异不大.设0)('0≠x f ,由于1x 满足,0))((')(0100=-+x x x f x f 解得)(')(0001x f x f x x -=重复这一过程,得到迭代格式)(')(1k k k k x f x f x x -=+2 牛顿法具体内容:近似精度要求为5e-6,带入不同初值结果如下表。
matlab解非线性方程MATLAB求解非线性方程一、Matlab求解非线性方程的原理1. 非线性方程是指当函数中的变量出现不同的次方数时,得出的方程就是非线性的。
求解非线性方程的准确性决定于得出的解集是否丰富,以及解的精度是否符合要求。
2. Matlab是一款多功能的软件,可以快速求解工程中的数学方程和模型,包括一元非线性方程。
Matlab 具有非线性解析计算能力,可以极大地提高求解效率。
二、Matlab求解非线性方程的方法1. 使用数值解法求解:包括牛顿法、割线法、共轭梯度法、梯度下降法等,可以采用Matlab编写程序,来计算满足一元非线性方程的解。
2. 使用符号解法求解:在Matlab中,可以直接使用solve函数来解决一元非线性方程。
3. Matlab求解非线性方程的技巧:1)定义区间:对非线性方程给出一个精确定义的区间,matlab会将该区间分成若干区间,在这些区间内搜索解;2)多给出初始值:可以给出若干个初始值,令matlab均匀搜索多个解;3)改变算法:可以更改matlab中不同的求解算法;4)换元法:可以通过改变不同的元变量,将非线性方程变成多个简单的线性方程,然后利用matlab求解。
三、Matlab求解非线性方程的特点1. 高效:Matlab求解的方式高效有效,性能优异,可以节省大量的求解时间。
2. 准确:Matlab采用符号解法时,解的准确度精度更高,可以满足大部分要求。
3. 节省资源:Matlab求解非线性方程节省计算机资源,可以很好地利用资源,提高工作效率。
四、 Matlab求解非线性方程的步骤1. 对结构表达式编写程序;2. 设定相应的条件;3. 优化程序;4. 运行程序;5. 分析结果;6. 测试代码;7. 验证学习结果。
五、Matlab求解非线性方程的事例例1:已知一元非线性方程f ( x ) = x^3 - 4x - 9 = 0,求精度范围在[-5,5]之间的实根解法:使用Matlab符号解法求解solX = solve('x^3-4*x-9 = 0','x');输出结果为:solX =3-31运行程序,即可得到由-5到5的实根。
matlab实现牛顿迭代法求解非线性方程组已知非线性方程组如下3*x1-cos(x2*x3)-1/2=0x1^2-81*(x2+0.1)^2+sin(x3)+1.06=0exp(-x1*x2)+20*x3+(10*pi-3)/3=0求解要求精度达到0.00001 ————————————————————————————————首先建立函数fun储存方程组编程如下将fun.m保存到工作路径中:function f=fun(x);%定义非线性方程组如下%变量x1 x2 x3%函数f1 f2 f3syms x1 x2 x3f1=3*x1-cos(x2*x3)-1/2;f2=x1^2-81*(x2+0.1)^2+sin(x3)+1.06;f3=exp(-x1*x2)+20*x3+(10*pi-3)/3;f=[f1 f2 f3]; ————————————————————————————————建立函数dfun用来求方程组的雅克比矩阵将dfun.m保存到工作路径中:function df=dfun(x);%用来求解方程组的雅克比矩阵储存在dfun中f=fun(x);df=[diff(f,'x1');diff(f,'x2');diff(f,'x3')];df=conj(df'); ————————————————————————————————编程牛顿法求解非线性方程组将newton.m保存到工作路径中:function x=newton(x0,eps,N);con=0;%其中x0为迭代初值eps为精度要求N为最大迭代步数con用来记录结果是否收敛for i=1:N;f=subs(fun(x0),{'x1' 'x2' 'x3'},{x0(1) x0(2) x0(3)});df=subs(dfun(x0),{'x1' 'x2' 'x3'},{x0(1) x0(2) x0(3)});x=x0-f/df;for j=1: length(x0);il(i,j)=x(j);endif norm(x-x0)<epscon=1;break;endx0=x;end%以下是将迭代过程写入txt文档文件名为iteration.txtfid=fopen('iteration.txt','w');fprintf(fid,'iteration');for j=1:length(x0)fprintf(fid,' x%d',j);endfor j=1:ifprintf(fid,'\n%6d ',j);for k=1:length(x0)fprintf(fid,' %10.6f',il(j,k));endendif con==1fprintf(fid,'\n计算结果收敛!');endif con==0fprintf(fid,'\n迭代步数过多可能不收敛!');endfclose(fid); ————————————————————————————————运行程序在matlab中输入以下内容newton([0.1 0.1 -0.1],0.00001,20) ————————————————————————————————输出结果——————————————————————————————————————————在iteration中查看迭代过程 iteration x1 x2 x3.mulStablePoint用不动点迭代法求非线性方程组的一个根function [r,n]=mulStablePoint(F,x0,eps)%非线性方程组:f%初始解:a%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-6;endx0 = transpose(x0);n=1;tol=1;while tol>epsr= subs(F,findsym(F),x0); %迭代公式tol=norm(r-x0); %注意矩阵的误差求法,norm为矩阵的欧几里德范数n=n+1;x0=r;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endendx0=[0 0 0];[r,n,data]=budong(x0);disp('不动点计算结果为')x1=[1 1 1];x2=[2 2 2];[x,n,data]=new_ton(x0);disp(’初始值为0,牛顿法计算结果为:’)[x,n,data]=new_ton(x1);disp('初始值为1,牛顿法计算结果为:')[x,n,data]=new_ton(x2);disp ('初始值为2,牛顿法计算结果为:')budong.mfunction[r,n,data]=budong(x0, tol)if nargin=-1tol=1e-3:endx1=budong fun(x0);n=1;while(norm(x1-x0))tol)&(n500)x0=x1;x1=budong_fun(x0);n=n+1:data(:,n)=x1;endr=x1:new_ton.mfunction [x,n,data]=new_ton(x0, tol)if nargin=-1tol=1e-8;endx1=x0-budong_fun(x0)/df1(x0);n=1;while (norm(x1-x0))tol)x0=x1;x1=x0-budong_fun(x0)/df1(x0);n=n+1;data(:,n)=x1;endx=x1;budong_fun.mfunction f=budong_fun(x)f(1)=3* x(1)-cos(x(2)*x(3))-1/2;f(2)=x(1)^2-81*(x(2)+0.1)^2+sin(x(3))+1.06; f(3)=exp(-x(1)*x(2))+20* x(3)+10* pi/3-1;f=[f(1)*f(2)*f(3)];df1.mfunction f=df1(x)f=[3sin(x(2)*x(3))*x(3) sin(x(2)*x(3))*x(2) 2* x(1)-162*(x(2)+0.1)cos(x(3))exp(-x(1)*x(2))*(-x(2))exp(-x(1)*x(2))*(-x(1))20]; 结果:不动点计算结果为r=1.0e+012*NaN -Inf 5.6541初始值为0,牛顿法计算结果为:x=0.5000 -0.0000 -0.5236初始值为1,牛顿法计算结果为:x=0.5000 0.0000 -0.5236初始值为2,牛顿法计算结果为:x=0.5000 0.0000 -0.5236。
数值分析中求解非线性方程的MATLAB求解程序(6种)数值分析中求解非线性方程的MATLAB求解程序(6种)1.求解不动点function [k,p,err,P]=fixpt(g,p0,tol,max1)%求解方程x=g(x) 的近似值,初始值为p0%迭代式为Pn+1=g(Pn)%迭代条件为:在迭代范围内满足|k|<1(根及附近且包含初值)k为斜率P(1)=p0;for k=2:max1P(k)=feval(g,P(k-1));err=abs(P(k)-P(k-1));relerr=err/(abs(P(k))+eps);p=P(k);if (err<tol)|(relerr<tol)< p="">break;endendif k==max1disp('超过了最长的迭代次数')endP=P';2.二分法function [c,err,yc]=bisect(f,a,b,delta)%二分法求解非线性方程ya=feval(f,a);yb=feval(f,b);if ya*yb>0break;max1=1+round((log(b-a)-log(delta))/log(2));for k=1:max1c=(a+b)/2;yc=feval(f,c);if yc==0a=c;b=c;elseif yb*yc>0b=c;yb=yc;elsea=c;ya=yc;endif b-a<delta< p="">break;endendc=(a+b)/2;err=abs(b-a);yc=feval(f,c);3.试值法function [c,err,yc]=regula(f,a,b,delta,epsilon,max1) %试值法求解非线性方程%f(a)和飞(b)异号ya=feval(f,a);yb=feval(f,b);if ya*yb>0disp('Note:f(a)*f(b)>0');for k=1:max1dx=yb*(b-a)/(yb-ya);c=b-dx;ac=c-a;yc=feval(f,c);if yc==0break;elseif yb*yc>0b=c;yb=yc;elsea=c;ya=yc;enddx=min(abs(dx),ac);if abs(dx)<delta|abs(yc)<epsilon< p="">break;endendc;err=abs(b-a)/2;yc=feval(f,c);4.求解非线性方程根的近似位置function R=approot(X,epsilon)%求解根近似位置%为了粗估算方程f(x)=0在区间[a,b]的根的位置,%使用等间隔采样点(xk,f(xk))和如下的评定准则:%f(xk-1)与f(xk)符号相反,%或者|f(xk)|足够小且曲线y=f(x)的斜率在%(xk,f(xk))附近改变符号。
求解线性方程组solve,linsolve例:A=[5 0 4 2;1 —1 2 1;4 1 2 0;1 1 1 1];%矩阵的行之间用分号隔开,元素之间用逗号或空格B=[3;1;1;0]X=zeros(4,1);%建立一个4元列向量X=linsolve(A,B)diff(fun,var,n):对表达式fun中的变量var求n阶导数。
例如:F=sym('u(x,y)*v(x,y)’);%sym()用来定义一个符号表达式diff(F); %matlab区分大小写pretty(ans)%pretty():用习惯书写方式显示变量;ans是答案表达式非线性方程求解fsolve(fun,x0,options)其中fun为待解方程或方程组的文件名;x0位求解方程的初始向量或矩阵;option为设置命令参数建立文件fun.m:function y=fun(x)y=[x(1)-0。
5*sin(x(1))-0。
3*cos(x(2)), .。
.x(2) — 0.5*cos(x(1))+0。
3*sin(x(2))];>〉clear;x0=[0。
1,0。
1];fsolve(@fun,x0,optimset(’fsolve'))注:.。
为续行符m文件必须以function为文件头,调用符为@;文件名必须与定义的函数名相同;fsolve()主要求解复杂非线性方程和方程组,求解过程是一个逼近过程。
Matlab求解线性方程组AX=B或XA=B在MATLAB中,求解线性方程组时,主要采用前面章节介绍的除法运算符“/”和“\”。
如:X=A\B表示求矩阵方程AX=B的解;X=B/A表示矩阵方程XA=B的解.对方程组X=A\B,要求A和B用相同的行数,X和B有相同的列数,它的行数等于矩阵A的列数,方程X=B/A同理.如果矩阵A不是方阵,其维数是m×n,则有:m=n 恰定方程,求解精确解;m〉n 超定方程,寻求最小二乘解;m〈n 不定方程,寻求基本解,其中至多有m个非零元素。