符合导线严密平差(带公式)
- 格式:et
- 大小:1.04 MB
- 文档页数:1

附合导线方位角闭合差计算公式的探讨
附合导线方位角闭合差是实现控制周解导线法运算的一种重要参数。
它代表了解导线和要控制的对准方位角之间的实际差异。
其指标越小,控制效果越好,说明解导线和要控制的对准方位角实际越接近。
附合导线方位角闭合差可以通过下面的计算公式来确定:
附合导线方位角闭合差=[解导线末附密对准方位角-(起点对准方位角+中间导线折返总差)]xK
其中,K为参数,默认值为1. K的取值会影响控制效果,当K取值较大时,附合导线方位角闭合差将变大,说明控制效果较差;当K取值较小时,附合导线方位角闭合差将变小,说明控制效果较好。
以上是附合导线方位角闭合差计算公式的原理。
有了上述计算公式,我们可以得出控制效果的一个指标,从而方便我们对控制周解导线法运算的结果进行判断与比较。

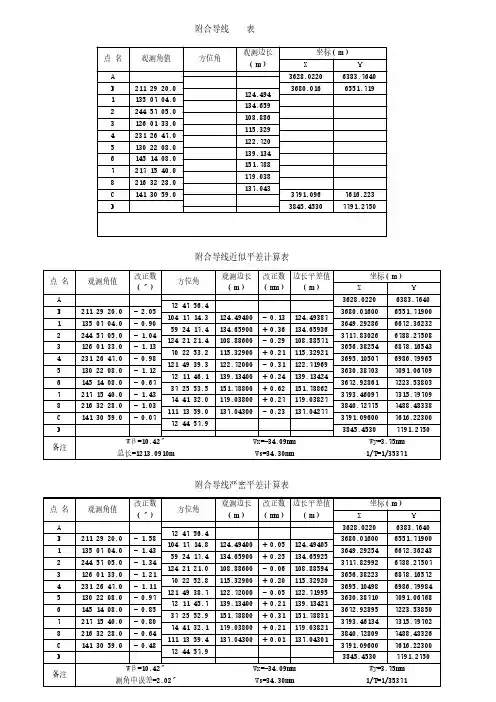
附合导线平差计算表(左角用)
计算:检查:
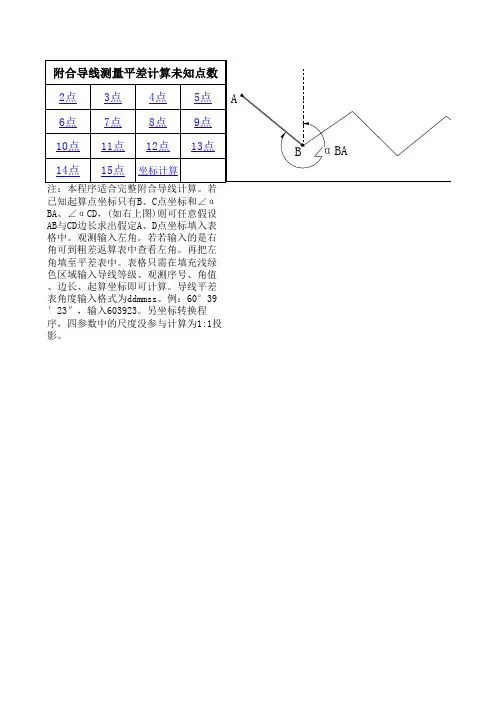
注意事项:
1、使用时,先根据实际点数的多少插入或删除行数。
但第五行和第六行不得删除,夹角个数行及上6行不要删除,目的是为了保
持公式的正确性,行数确定后,从第六行F列到W列选中,把公式拉到您需要的行数
2、“蓝色”字体表示计算时,需要输入的项目,根据实际数据情况进行填写。
3、要根据使用的等级导线,来修改“角度闭合差限差”计算公式(N20数据)及“导线全长相对闭合差”(Q22数据)
4、如果“N21”和“Q22”显示超限则数据不可用,要重新进行测量
5、计算好后可以把不需要显示的列隐藏起来,如“M”列
)。
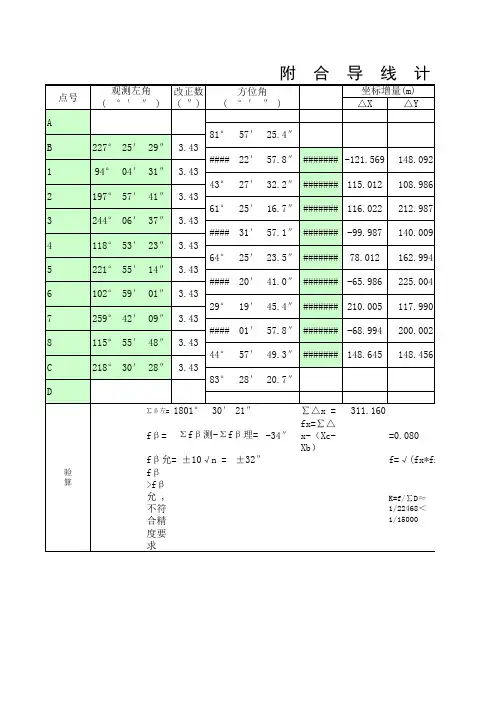
附合导线平差内业计算附合导线平差内业计算一、主要公式(左角):如图:有: αB1=αA B +βB ±180°α12=αB1+β1±180° α23=α12+β2±180° α3C =α23+β3±180°αCD =α3C +βC ±180°计算终边坐标方位角的一般公式为:α终边′=α始边+Σβ测±n ×180°角度闭合差:ƒβ测=α终边′-α终边 ,ƒβ允=±10n (一级导线技术要求),式中n 为导线观测角个数。
如果ƒβ测>ƒβ允 ,则说明测角误差超限,应停止计算,重新检测角度。
如果ƒβ测>ƒβ允,说明测角精度符合要求,此时需要进行角度闭合差的调整。
调整是应注意:当用左角计算α终边′时,改正数的符号与ƒβ测符号相反;当用右角计算α终边′时,改正数的符号与ƒβ测符号相同。
可将闭合差按相反符号平均分配给各观测角,而得出改正角:V 改=-ƒβ测/n式中n 内角的个数,计算的改正数,取位至秒。
根据公式β=β测+V改 得出改正后的观测角,继而算出新的方位角。
为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。
否则,应重新推算。
坐标增量闭合差:ΔX AB =D AB ×COS(αAB ),ΔY AB =D AB ×SIN(αAB ) ΔX B1=D B1×COS(αB1),ΔY B1=D B1×SIN(αB1) ΔX 12=D 12×COS(α12),ΔY 12=D 12×SIN(α12) ΔX 23=D 23×COS(α23),ΔY 23=D 23×SIN(α23) ΔX 3C =D 3C ×COS(α3C ),ΔY 3C =D 3C ×SIN(α3C )按附合导线的要求,各边坐标增量代数和的理论值ΣΔX i 、ΣΔY i ,应等于终、起两点的已知坐标值之差。
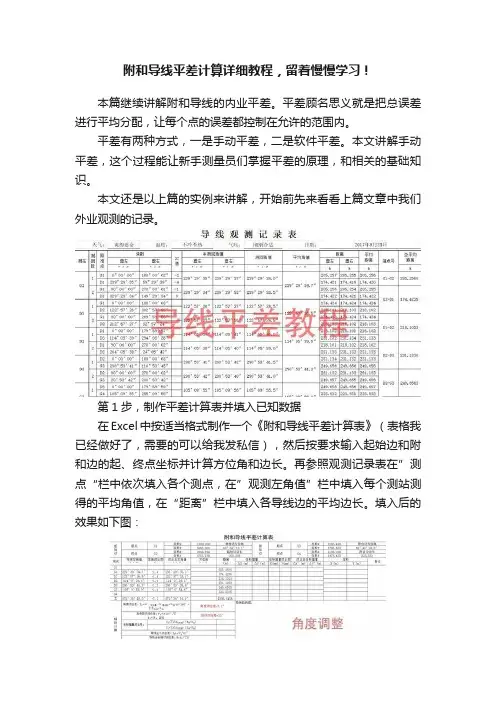
附和导线平差计算详细教程,留着慢慢学习!本篇继续讲解附和导线的内业平差。
平差顾名思义就是把总误差进行平均分配,让每个点的误差都控制在允许的范围内。
平差有两种方式,一是手动平差,二是软件平差。
本文讲解手动平差,这个过程能让新手测量员们掌握平差的原理,和相关的基础知识。
本文还是以上篇的实例来讲解,开始前先来看看上篇文章中我们外业观测的记录。
第1步,制作平差计算表并填入已知数据在Excel中按适当格式制作一个《附和导线平差计算表》(表格我已经做好了,需要的可以给我发私信),然后按要求输入起始边和附和边的起、终点坐标并计算方位角和边长。
再参照观测记录表在”测点“栏中依次填入各个测点,在”观测左角值”栏中填入每个测站测得的平均角值,在“距离”栏中填入各导线边的平均边长。
填入后的效果如下图:注:已知边的方位角和边长的计算方式很多,比如用5800计算器的Pol函数,道路之星的测站、CASS查询等。
第2步,计算角度闭合差计算角度闭合差,是为了检验外业角度观测的精度是否满足相应等级导线的技术要求。
如果实测的角度闭合差<>相关计算公式:实测角度闭合差=实测附和边方位角-理论附和边方位角实测附和边方位角=起始边方位角-N*180+实测左角值之和容许角度闭合差各等级导线有相应规定(各等级导线的技术要求在上篇文章中)。
注:N为测量站数,方位角取值范围是0度(含)到360度(不含),大于360度的减去360度,小于0度的加上360度。
本案例经计算:角度闭合差=7.1秒,容许闭合差=22秒,观测精度合格。
第3步,计算左角改正数经过角度闭合差的计算,确定外业成果合格后,就要计算左角改正数。
左角改正数=角度闭合差的相反数/测站个数改正后左角值=观测左角值+左角改正数本案例角度闭合差=7.1秒,那么左角改正数=-7.1/5=-1.42秒。
分配说明:为尽量平均分配误差,我们可将改正数保留1位小数,所以案例中每个测站分配-1.4秒,这时还有0.1秒未得到分配。
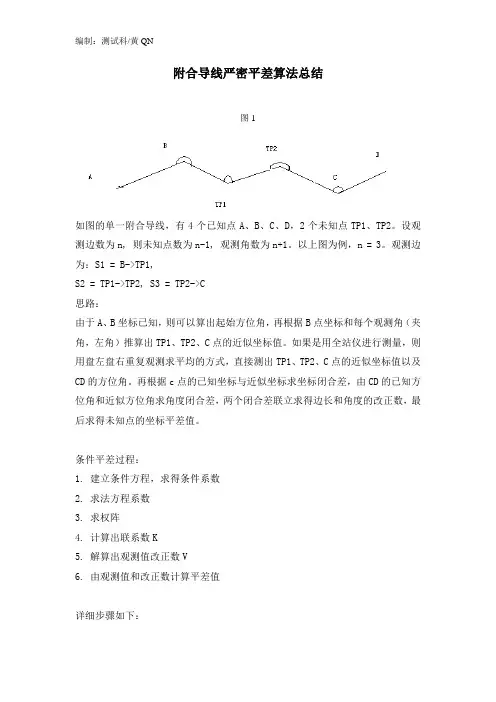
附合导线严密平差算法总结图1如图的单一附合导线,有4个已知点A、B、C、D,2个未知点TP1、TP2。
设观测边数为n, 则未知点数为n-1, 观测角数为n+1。
以上图为例,n = 3。
观测边为:S1 = B->TP1,S2 = TP1->TP2, S3 = TP2->C思路:由于A、B坐标已知,则可以算出起始方位角,再根据B点坐标和每个观测角(夹角,左角)推算出TP1、TP2、C点的近似坐标值。
如果是用全站仪进行测量,则用盘左盘右重复观测求平均的方式,直接测出TP1、TP2、C点的近似坐标值以及CD的方位角。
再根据c点的已知坐标与近似坐标求坐标闭合差,由CD的已知方位角和近似方位角求角度闭合差,两个闭合差联立求得边长和角度的改正数,最后求得未知点的坐标平差值。
条件平差过程:1.建立条件方程,求得条件系数2.求法方程系数3.求权阵4.计算出联系数K5.解算出观测值改正数V6.由观测值和改正数计算平差值详细步骤如下:1、建立条件方程在单一附合导线中,只需要三个条件方程即:方位角附合条件、纵坐标附合条件和横坐标附合条件方程。
(省略了条件方程的推导过程,详细过程请查看参考资料:《测量平差.pps》)(1)方位角附合条件[Vβi]n+11+ Wβ= 0式中,Wβ= - (T0– T CD+ [βi]n+11 - (n+1)*180°)(角度闭合差)βi ——角度观测值(夹角,左角)Vβi ——各观测角的改正数。
如果是用全站仪观测,则Wβ= - (T CD– T CD)式中,T CD ——CD的方位角观测值,T CD ——CD的已知方位角(2)纵坐标X附合条件方程[Cos TI * VSi]1n - (1/ ρ”)* [(Yn+1- Yi) * Vβi]1n - W x = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Yn+1—— C点即终止点的横坐标Y的观测值(近似值)Yi——待定点的横坐标Y的观测值Wx = - (Xn+1- XC)XC—— C点即终止点的纵坐标X的已知值ρ” = 2062.65(3)横坐标Y附合条件方程[Sin TI * VSi]1n + (1/ ρ”)* [(Xn+1- Xi) * Vβi]1n– W Y = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Xn+1—— C点即终止点的纵坐标X的观测值(近似值)Xi——待定点的纵坐标X的观测值WX = - (Yn+1- YC)YC—— C点即终止点的横坐标Y的已知值ρ” = 2062.652、求条件方程的系数矩阵联立3个方程得改正数条件方程组:[Vβi]n+11+ Wβ= 0[Cos TI * VSi]1n - 1/ ρ”* [(Yn+1- Yi) * Vβi]1n - W x = 0;[Sin TI * VSi]1n + 1/ ρ”* [(Xn+1- Xi) * Vβi]1n– W Y = 0;其系数矩阵arrA为:(即改正数V的系数,此处以图1为例, n = 3)3、联系数法方程(简称法方程)AP-1A T K – W = 0A——系数矩阵arrAK ——乘系数P ——权阵W ——闭合差矩阵由上得法方程的系数阵N:N = AP-1A T(权的推导见参考资料:《全站仪观测导线测量平差方法的研究.pdf》)角度权:P βi = 1;(因为角度的标称精度是固定的,各观测角权值相等) 边长权:P Si = (μ0 *μ0 ) / (M D * M D )(误差比例系数固定,边长的误差与距离有关,因此不一致)式中,μ0 ——先验测角中误差,以秒为单位 M D —— 距离观测中误差若 导线边长为S i (米),e1 为仪器的边长标称固定误差(mm ),e2为仪器的边长比例误差系数(无单位),则M D = ± (e1 + e2 * S i * 0.001)mm 需转化为厘米:M D = M D ** 0.1 (cm )由于此处是要P 的逆矩阵P -1,因此要求P 的各元素的倒数(P 是对角矩阵,对角矩阵的逆矩阵就是原矩阵元素的倒数) Psi = 1/ Psi ;由上可得,P -1 矩阵如下:4、求改正数由于N 已经在前面的步骤中求出,求N 的逆矩阵。
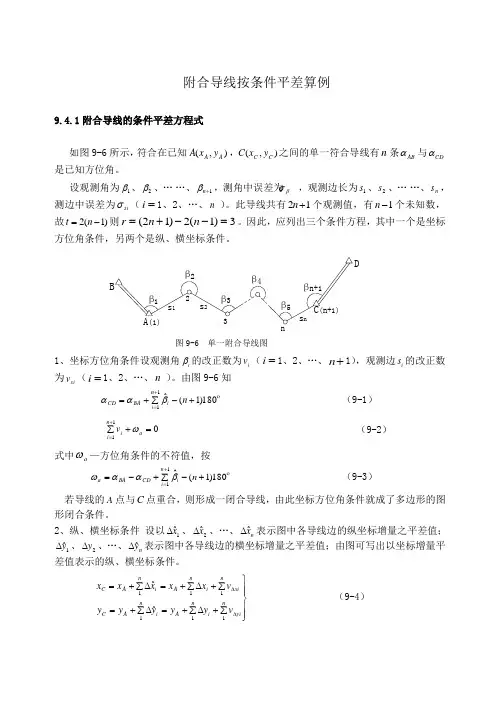
附合导线按条件平差算例9.4.1附合导线的条件平差方程式如图9-6所示,符合在已知),(A A y x A ,),(C C y x C 之间的单一符合导线有n 条AB α与CDα是已知方位角。
设观测角为β、β、… …、β,测角中误差为 ,观测边长为s 、s 、… …、s ,故t1为v 1=ii BACD 011=+∑+=a i n i v ω (9-2)式中a ω—方位角条件的不符值,按180)1(ˆ11+-∑+-=+=n in i CD BAaβααω (9-3)若导线的A 点与C 点重合,则形成一闭合导线,由此坐标方位角条件就成了多边形的图形闭合条件。
2、纵、横坐标条件 设以1ˆx ∆、2ˆx ∆、…、n x ˆ∆表示图中各导线边的纵坐标增量之平差值;1ˆy∆、2y ∆、…、n yˆ∆表示图中各导线边的横坐标增量之平差值;由图可写出以坐标增量平差值表示的纵、横坐标条件。
⎪⎪⎭⎪⎪⎬⎫∑+∆∑+=∆∑+=∑+∆∑+=∆∑+=∆∆yi n i n A i n A C xi n i n A i nA C v y y yy y v x x xx x 111111ˆˆ (9-4)σ令⎪⎪⎭⎪⎪⎬⎫--∆∑=--∆∑=)()(11A Ci nyA C i nx y y y x x x ωω (9-5)则⎪⎪⎭⎪⎪⎬⎫=+∑=+∑∆∆0011yyi nx xi nv v ωω (9-6) 以微分量代替改正数,则有)()()(211n xi nx d x d x d v ∆++∆+∆=∑∆{}ρα1231211)()()(cos v y y y y y y v v n Csi i nxin-'++-+--∑=∑∆将上式代入式9-6得纵坐标条件式,且同理已可得横坐标的条件式即⎪⎪⎭⎪⎪⎬⎫=+-'∑+∑=+-'∑-∑====0)(1sin 0)(1cos 1111y i i Cni sii n i x i i Cni si i n i v x x v v y y v ωραωρα (9-7)上式就是单一符合导线的纵、横坐标条件方程x ω、y ω为条件式的不符值,按⎪⎪⎭⎪⎪⎬⎫-'=-∆∑+=-'=-∆∑+=C CCi nA yC CC i nA x y y y y y x x x x x 11ωω (9-8)式中i x 、i y 是由观测值计算的各导线点的近似坐标。
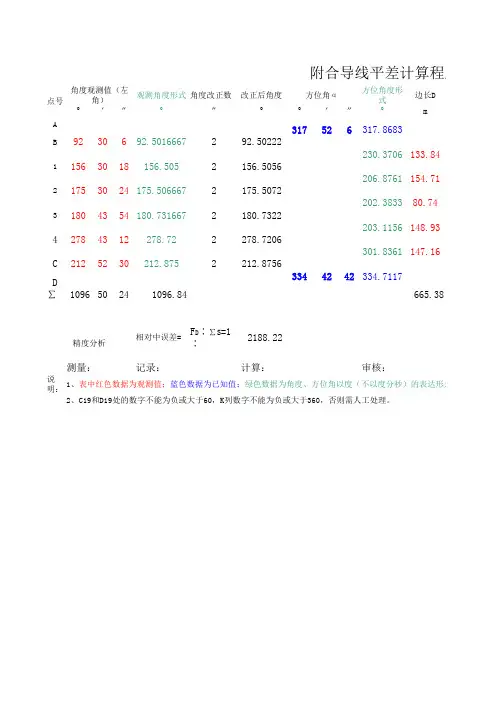
观测角度形式角度改正数改正后角度方位角度形式边长D°′″°″°°′″°m A D∑109650241096.84665.38相对中误差=F D ∶∑S =1∶2188.22说明:1、表中红色数据为观测值;蓝色数据为已知值;绿色数据为角度、方位角以度(不以度分秒)的表达形式,会自动计2、C19和D19处的数字不能为负或大于60,K列数字不能为负或大于360,否则需人工处理。
测量:记录:计算:审核:4C 27843122125230B 1292175156方位角α180.7322230.3706206.8761202.3833203.115631804354角度观测值(左角)点号31752630243063018180.731667222292.5016667156.505175.506667精度分析附合导线平差计算程序278.72212.87522278.7206212.8756175.507292.50222156.50563344242317.8683133.84154.7180.74148.93301.8361334.7117147.16ΔxΔyυxυyΔx′Δy′xy-357.369-387.255-0.13071-0.27455秒)的表达形式,会自动计算,可隐藏;紫色数据为平差结果。
-137.00277.59672日期:-125.021-0.02926-0.02891-58.5294-125.082-0.06145-0.060723802.8514006.77-70.00253903.6333805.1083833.6313943.138-103.137-30.77924028.533730.436坐标增量计算值(m)坐标增量改正数(m)改正后的坐标增量(m)坐标(m)-0.05522-0.06384-0.03331-0.02629-0.03039-85.3658程序-0.01586-85.3921-138.03-74.6727-103.082-69.9386-30.7459-137.999-74.6568-136.9733671.033619.243593.4333744.32277.62563-58.468。