参照磁罗盘航向作计时转弯
- 格式:pptx
- 大小:140.32 KB
- 文档页数:13
航空知识知多少——飞机航向当飞机成为我们⽇常⽣活中必不可少的出⾏⼯具,其频繁飞⾏已经多到我们⼏乎抬头仰望就能轻易见到,只是我们凭借⾁眼也只是能够见到飞机在朝不同的⽅向飞⾏⽽已,根本看不到航线。
有时不禁也会疑惑,飞机不会飞偏么,航向是怎么确定的?相信即使是经常搭乘飞机的飞⼈也对其不甚了解,下⾯⼩编就带⼤家来答疑解惑,⼀起来看看飞机到底是怎样确定航向的。
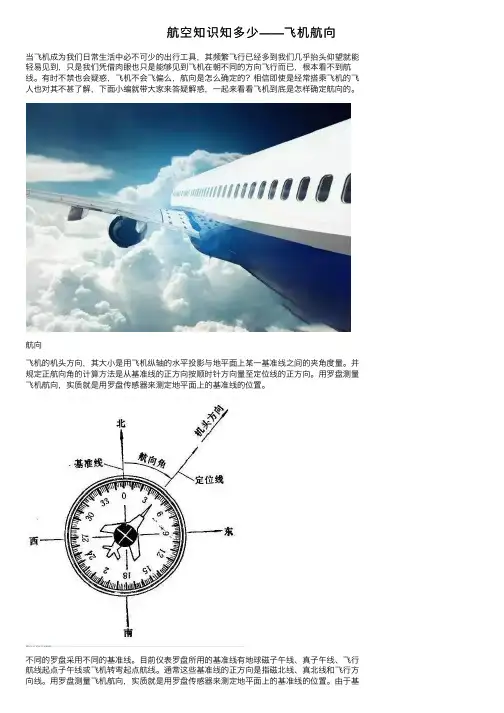
航向飞机的机头⽅向,其⼤⼩是⽤飞机纵轴的⽔平投影与地平⾯上某⼀基准线之间的夹⾓度量。
并规定正航向⾓的计算⽅法是从基准线的正⽅向按顺时针⽅向量⾄定位线的正⽅向。
⽤罗盘测量飞机航向,实质就是⽤罗盘传感器来测定地平⾯上的基准线的位置。
不同的罗盘采⽤不同的基准线。
⽬前仪表罗盘所⽤的基准线有地球磁⼦午线、真⼦午线、飞⾏航线起点⼦午线或飞机转弯起点航线。
通常这些基准线的正⽅向是指磁北线、真北线和飞⾏⽅向线。
⽤罗盘测量飞机航向,实质就是⽤罗盘传感器来测定地平⾯上的基准线的位置。
由于基准不同,故将航向分为真航向、磁航向、罗航向、⼤圆航向和陀螺航向。
真航向真⼦午线与飞机纵轴在⽔平⾯上投影的夹⾓为真航向⾓。
按真航向⾓计算的飞机航向成为真航向。
磁航向磁⼦午线与飞机纵轴在⽔平⾯上投影的夹⾓为磁航向⾓。
按磁航向⾓计算的飞机航向成为磁航向。
磁⼦午线与真⼦午线⽅向不⼀致⽽形成的磁偏⾓成为磁差⾓。
地球磁场随时间、地点不同⽽异。
罗航向飞机上的钢铁物质和⼯作着的电⽓设备会成为飞机磁场。
由此,飞机上⽤磁罗盘测得航向基准线实际上是地球磁场与飞机磁场两者形成的合成磁场⽔平分量⽅向,即罗经线。
该线与飞机纵轴在⽔平⾯上的夹⾓为罗航向⾓。
按罗航向⾓计算的飞⾏航向⾓罗航向。
陀螺航向以陀螺的⾃转轴置于⽔平,作为航向基准线,陀螺所指⽰的航向即为陀螺航向。
陀螺航向通常⽤来确定飞机的转弯⾓度;陀螺航向的基准线可以任意选择位置,故不考虑它与磁航向和真航向的关系。
把它的零度线置于磁⼦午线上,所指的为陀螺磁航向;若把它的零度线置于真⼦午线上,所指的为陀螺真航向。

目录第一章千里之行,始于足下 (3)第二章云端上的数学题 (5)时间换算 (5)航向换算 (6)滑水现象 (7)温度转换 (8)ISA及ISA偏差 (10)气压高度 (11)侧风分量计算 (12)顶风和顺风分量 (14)计算偏流角 (15)单位换算 (16)能见度与跑道视程的换算 (18)燃油计划 (18)放油 (20)磁罗盘转弯 (21)60比1法则 (23)标准速率转弯(SRT)的坡度 (25)转弯半径 (25)真空速的计算 (26)时间-速度-距离换算 (27)第三章计算下降顶点 (31)3比1法则 (31)恒定下降率法 (34)俯仰姿态法 (35)下降过程中的风修正 (37)第四章目视下降点VDP (39)DME法 (42)计时法 (43)俯仰姿态法 (45)目视进近下滑航径(检查高距比) (46)第五章速算练习题 (48)第六章小结 (50)第七章参考答案 (52)第二章参考答案 (52)第三章参考答案 (56)第五章参考答案 (57)附录公式 (59)第一章千里之行,始于足下速算能力的根基在于对基本的加、减、乘、除法的运用能力。
而这项能力的熟练程度主要取决于练习。
开始时,你可以用一张纸记下你所运算的数字(或方程式),然后回顾一下笔算解题的步骤,并在脑海中重复解决问题的步骤。
这需要你的一点业余时间以及自律性。
和学习其他技能一样,重复和努力是提高速算能力的唯一途径。
遇到需要数学运算去解决的问题时,首先需要定义这个问题是什么,你要的答案是什么?其次,找到相应的运算公式,本书包含了你所需要的绝大部分公式。
然后,根据自己的实际需要组合方程;最后,代入特定数值运算并解决问题。
上述方法在学习本书过程中也同样适用。
如果你觉得需要用笔算去解答问题,不要觉得麻烦,就那样做!完成演算后,把纸和笔放到一边并在脑海里重复演算过程,直到你能熟练地脱口而出为止。
本书许多章节包含练习题,另外,第五章综合了各类速算练习题,参考答案都在第七章中。
机载VOR设备使用详解设备使用详解有些概念需要不厌其烦地重复,以免混淆,也便于下文直接引用其英文缩写:VOR Very high frequency Omni-bearing Range, 地面台站发送的甚高频全向无线电信标(信号)Nav1 , Nav2机载VOR信号(及ILS信号)接收机OBI Omni-Bearing Indicator, 与Nav 连接、位于主飞行仪表板右侧的整个圆形表头OBS Omni-Bearing Selector, OBI 左下角的旋钮,它使刻度盘转动CDI Course Deviation Indicator, OBI 的垂直指针Flag OBI 中间偏右的三角形标志,有三个状态:To/From/Off 注:Nav2是单纯的VOR接收机,Nav1既可用作ILS接收机,又可用作VOR接收机。
Nav1作VOR使用时与Nav2是一样的。
下面以Nav2为例说明VOR的使用方法。
★VOR设备使用详解★按Shift-2打开电子设备控制面板,调好Nav2的频率接收信号。
在Nav接收到信号前(Flag 为“OFF”),旋转OBS旋钮(用mouse连续点击它)也会令刻度盘转动,但这时CDI指针是不会动的。
接收到信号后(Flag为“To”或“From”),旋转OBS旋钮令刻度盘转动的同时,CDI 会根据OBS读数、飞机与地面台站的相对位置偏移。
一、测定方向方法有两种:(1)旋转OBS,直至Flag指示为“To”,即三角形向上,并且CDI指针位于中间,假设此时OBI刻度盘顶上读数为270,那么:飞机沿270度航向(向西飞)可飞至台站上空。
具体飞行过程如下:操纵飞机转弯,使DG或磁罗盘上的航向等于刻度盘顶上读数,即270度,保持CDI指针在中间,就可一直飞到台站的上空。
飞往台站途中,应适当调整航向,使CDI保持在中间位置(指针偏右时,飞机稍转右,指针偏左时,飞机稍转左,指针回中时,调整飞机航向回270度,当有侧风时,航向应稍偏向侧风来向,风速越大,所需偏向就越大)。
从“两个罗盘”到“航向位置指示器”作者:曲霞钱金山来源:《硅谷》2013年第22期摘要单机穿云飞行是飞行员必须掌握的技能之一,其最后一个阶段是使飞机沿跑道延长线穿云下降。
在这一过程中,由于受侧风的影响以及飞行员保持要素不准等原因,飞机可能会偏离跑道延长线,进而影响安全着陆。
所以,飞行员必须要及时地发现并修正偏差,使飞机回到跑道延长线上。
复杂气象条件下,无法用目视的方法判断飞机是否在跑道延长线上,偏差的发现和修正一般是借助于领航仪表来实现的。
在初教机上,可以借助于两个罗盘——磁罗盘和无线电罗盘;而在安装有航向位置指示器的飞机上,无线电罗盘和磁罗盘指示的角度都可以在航向位置指示器上指示,所以,偏差的发现和修正只需借助这一块仪表进行。
完成初教机飞行训练的学员,已经适应了两个罗盘,本文对如何尽快完成从“两个罗盘”到“航向位置指示器”的转化做详细分析。
关键词“两个罗盘”;“航向位置指示器”;穿云下降;偏差和修正中图分类号:V323 文献标识码:A 文章编号:1671-7597(2013)22-0102-021 发现偏差如果飞机在跑道延长线上(所说的不偏),飞机的磁航向(CX)和电台相对方位角(DXF)之和应等于着陆磁航向(CX着),即CX+DXF=CX着。
否则,飞机将偏离跑道延长线。
飞机沿跑道延长线上穿云下降,实际上就是沿着与跑道延长线相重合的无线电方位线作向电台飞行。
向电台飞行的方法有两种:一种是保持DXF=0º;另一种是修正风的影响,保持DXF=360º+PL。
1.1 理论分析1.1.1 保持DXF=0º飞行在公式CX+DXF=CX着中,如果DXF=0º,说明当CX=CX着时,飞机在跑道延长线上,并且机头对正导航台。
如果飞机位置偏左,CX大于CX着;如果飞机位置偏右,CX小于CX 着。
飞机位置偏离跑道延长线的程度用飞机位置和导航台的连线与跑道延长线之间的夹角,称之为偏离角(LJ)来表示,其大小等于CX与CX着的差值。
磁罗盘转弯的提前延迟量1. 磁罗盘转弯的基本原理磁罗盘是一种用来测量方位角的仪器,它基于地球磁场的作用原理。
磁罗盘通常由一个磁针和一个刻度盘组成。
磁针指向地磁北极,而刻度盘上的刻度则表示方位角。
当我们使用磁罗盘进行转弯时,需要注意的是磁罗盘指示的是地磁北方向,而不是真实的地理北方向。
因此,在进行转弯时需要考虑磁罗盘的指示与真实方向之间的差异。
2. 磁罗盘转弯的提前延迟量的概念磁罗盘转弯的提前延迟量是指在进行转弯时,为了保持航向的准确性,需要提前多少距离开始转弯。
这个距离可以通过计算来确定,它取决于飞机的速度、转弯半径和转弯角度等因素。
提前延迟量的计算方法可以使用航空导航软件或者通过手动计算来确定。
在计算过程中,需要考虑飞机的速度、转弯半径、转弯角度以及磁罗盘的指示与真实方向之间的差异。
3. 磁罗盘转弯的提前延迟量的影响因素磁罗盘转弯的提前延迟量受到多个因素的影响,下面列举了一些主要的影响因素:3.1 飞机的速度飞机的速度是影响提前延迟量的重要因素之一。
较高的速度意味着飞机在单位时间内飞行的距离更远,因此需要提前更长的距离开始转弯,以保持航向的准确性。
3.2 转弯半径转弯半径是飞机在转弯过程中所描述的一个圆的半径。
较小的转弯半径意味着飞机在转弯过程中需要更大的侧向加速度,因此需要提前更长的距离开始转弯,以保持航向的准确性。
3.3 转弯角度转弯角度是指飞机在转弯过程中改变航向的角度。
较大的转弯角度意味着飞机需要更长的时间来完成转弯,因此需要提前更长的距离开始转弯,以保持航向的准确性。
3.4 磁罗盘指示与真实方向的差异磁罗盘指示与真实方向之间的差异也会影响提前延迟量。
如果磁罗盘指示与真实方向相差较大,那么需要提前更长的距离开始转弯,以弥补这个差异,以保持航向的准确性。
4. 计算磁罗盘转弯的提前延迟量计算磁罗盘转弯的提前延迟量可以使用以下的公式:提前延迟量 = 速度 * 转弯时间 * 转弯半径 / 60其中,速度为飞机的速度,转弯时间为完成转弯所需的时间,转弯半径为飞机的转弯半径。
第六节空中领航空中领航是航行情报人员应该重点掌握的航空技术基础知识之一,它主要包括领航基础知识、基本领航方法和现代领航方法等部分的内容.航行情报员应该能够熟练地进行领航作业和计算,掌握飞机从起飞离场、航线飞行到进近着陆的空中领航全过程,熟悉现代运输机的OMEGA/VLF导航、惯性导航和组合导航方法,为其在今后准确高效地完成航行情报服务工作奠定良好的理论基础。
一、考试范围和要求可参照下列要求进行考前准备,该部分的执照考试题主要包括以下重点内容:1、领航基础知识——要求了解地球和航图的相关知识,掌握基本航行元素的测算方法,理解风对飞机航行的影响规律,熟悉航行速度三角形各向量间相互关系及其变化规律,熟练掌握计算偏流、地速以及空中风的方法。
2、基本领航方法——要求理解航线、航向线和航迹间相互关系,熟悉推测领航、无线电领航的基本方法,掌握沿航线上升和下降的计算。
3、领航的准备与实施——要求掌握仪表进近的飞行程序,熟悉直角和修正角航线修正风的计算,了解领航准备内容和领航记录表的填写方法;4、自动领航——要求了解OMEGA/vLF导航、惯性导航和组合导航的飞行前准备、飞行中导航方法,熟悉主要导航页面和仪表显示的导航数据。
二、主要参考文献王东光《领航学*中国民航飞行学院教材1998.6张焕《空中领航学(上)》中国民航飞行学院教材1998.1奠能逊Ⅸ空中领航学(上)》中国民航飞行学院教材1994奠能逊张焕《空中领航习题集》中国民航飞行学院教材1997 10三、试题汇编B 16001:在领航中,地球作为一个正球体,它的平均半径约为:(A) 6357千米 (B) 6371千米 (C) 6378千米 (D) 6376千米B 16002:领航学的基本任务是:(A) 引领飞机航行(B)引领飞机沿预定路线安全、准时到达目的地(C)引领飞机安全准时到达目的地(D)引领飞机沿预定路线,安全到达目的地A 16003:大圆航线的航线角是指:(A)航线起点的真航线角 (B)航线起点的磁航线角(C)航线中点的航线角 (D)航线终点的真航线角D 16004:地球表面两点之间的大圆航线的特点是:(A) 各点航线角相等 (B) 航线距离最短(C) 航线距离最长 (D) 各点航线角不相等,航线距离最短C 16005:地球上两点之间的最短的航线距离是指:(A) 两点之间的直线长度 (B) 飞机飞行过程中的实际距离(C) 两点间大圆弧的弧长 (D) 两点之间等角线的长度A 16006:磁差是指:(A) 经线偏离真经线的角度 (B) 真经线偏离磁经线的角度(C) 磁经线偏离罗经线的角度 (D) 罗经线偏离磁经线的角度C 16007:1:50万航图,图上长1厘米,相当于地面长:(A) 0.5千米 (B) 50千米 (C) 5千米 (D) 500千米A 16008:某跑道长2千米,画到一张1:10万地图上时长度是:(A) 2厘米 (B) 4厘米 (C) 6厘米 (D) 8厘米B 16009:北极的经度和纬度各是多少:(A) 北纬90°,东经180°(B) 北纬90°,经度为0°至东、西180°之间的任意值(C) 北纬0°,东经90°(D) 纬度和经度都是0°A 16010:1海里相当于多少千米和多少英里:(A) 1.852千米和1.15英里 (B) 1.15千米和1.852英里(C) 1.15千米和0.54英里 (D) 1.852千米和0.54英里D 16011:100米等于多少英尺:(A) 300英尺 (B) 305英尺 (C) 280英尺 (D) 328英尺D 16012:地图上等磁差曲线是:(A) 真经线 (B) 磁经线(C) 罗经线 (D) 磁差相等的各地点连成的曲线D 16013:航线角是指:(A) 从经线北端顺时针量到航线的角度(B) 从经线量到航线去向的角度(C) 从经线北端反时针量到航线去向的角度(D) 从航线起点的经线北端顺时针量到航线去向的角度B 16014:墨卡托投影图属于:(A) 等距投影 (B) 等角正圆柱投影 (C) 等积投影 (D) 任意投影A 16015:墨卡托投影图(等角正圆柱投影图)上的等角航线是:(A) 直线 (B) 凹向地球两极的曲线(C) 凸向地球两极的曲线 (D) 凹向赤道的曲线B 16016:一幅1/100万的航图分成几幅1/50万世界航图:(A) 2幅 (B) 4幅 (C) 8幅 (D) 任意多幅A 16017:在1/100万航图上,甲乙两地图上量得长10厘米,代表实地距离:(A) 100千米 (B) 100海里 (C) 10千米 (D) 1千米A 16018:地球表面任一点的经线和纬线指向什么方向:(A) 经线指南北,纬线指东西 (B) 经线指北,纬线指东(C) 经线指东西,纬线指南北 (D) 经线指南,纬线指西D 16019:以下说法哪一种是正确的:(A) 地球表面各地点的地方时都不相同(B) 只有赤道上各地点的地方时相同(C) 只有主经线上各地点的地方时相同(D) 经度相同的各地点地方时相同B 16020:全球划分为多少个时区,每个时区包含经度多少度:(A) 12个,30° (B) 24个, 15°(C) 18个,20° (D) 36个, 10°A 16021:同一时区内以哪一个时刻为该时区的标准时刻:(A) 该时区中央经线的地方时 (B) 时区西边边缘经线的地方时(C) 时区东边边缘经线的地方时 (D) 时区内任一地点的地方时B 16022:我国位于东经72°到东经138°之间,包含几个时区?最西边与最东边时区时相差几个小时:(A) 5个,5小时 (B) 5个,4小时 (C) 4个,4小时 (D) 3个,6小时C 16023:我国统一使用的北京时:(A) 北京的地方时,东八区的时区时 (B) 八时区的时区时(C) 八时区的区时 (D) 经度120°经线的地方时D 16024:世界时是指:(A) 英国伦敦的地方时 (B) 西二区的时区时(C) 12时区的的时区时 (D) 零时区的时区时B 16025:东八区和西六区相差几个小时:(A) 2小时 (B)14小时 (C) 10小时 (D) 22小时A 16026:98年1月11日上海(N31°12′E121°20′)日落时刻(地方时)是17:17北京时和世界时各是多少:(A) 1月11日北京时17:11′40″,世界时09:11′40″(B) 1月11日北京时17:22′20″,世界时09:22′20″(C) 北京时1月11日17:11′40″,世界时1月12日01:11′40″(D) 北京时1月11日17:22′20″,世界时1月10日09:22′20″C 16027:16:42′(北京时)在拉萨机场着陆,着陆时拉萨(E91°07′)的时区和地方时各是多少:(A) 区时是14:42,地方时是14:37′32″(B) 区时是18:42,地方时是18:46′28″(C) 区时是18:42,地方时是14:46′28″(D) 区时是18:42,地方时是18:37′32″C 16028:飞机于10月12日10:00(北京时)从上海虹桥机场起飞前往旧金山,预计飞行11小时,到达旧金山时,当地时刻(西八区)是多少:(A) 10月12日21:00 (B) 10月11日21:00(C) 10月12日05:00 (D) 10月12日13:00B 16029:某日,北京( E 1160 25 I.) 19: 55天黑(地方时),乌鲁木齐(E87°35) 20:11'(地方时)天黑,从北京天黑到乌鲁木齐天黑间隔时间是:(A)0:16 (B) 2:11′20″ (C) 2:40 (D) 1:54C 16030:飞机自西向东飞行,当越过日界线时,日期怎样变更:(A) 原日期不变 (B) 增加一天(C) 减少一天 (D) 增加12小时,或者减少12小时B 16031:1998年9月1日北京时15:50,从上海飞往旧金山(西八区) , 9月1日于11:10当地时间到达,飞行了几个小时:(A) 4:40 (B) 11:20 (C) 10:40 (D) 14:40C 16032:飞机飞行过程中,飞机向右转弯,则航向:(A) 不变 (B) 减少 (C) 增大 (D) 可能增大,可能减少D 16033:罗差是:(A) 磁罗盘的误差 (B) 磁航向和罗航向的差角(C) 罗航向和真航向的差角 (D) 罗经线偏离磁经线的角度C 16034:飞机在平直匀速飞行中,直读磁罗盘指示的航向是110°,罗差为一30,磁差为6°E,真航向和磁航向,罗航向各是多少度:(A) 120°、126°、116° (B) 120°、116°、118°(C) 113°、107°、110° (D) 128°、134°、110°B 16035:飞行高度是指:(A) 飞机飞行的高度 (B) 飞机到某一基准水平面的垂直距离(C) 飞机到机场平面的垂直距离 (D) 飞机到海平面的垂直距离D 16036:在航空上相对高度通常是指:(A) 以平均海平面为基准面的高度(B) 以当时飞机正下方的地平面为基准面(C) 以标准海平面气压面为基准(D) 以机场平面为基准面的高度B 16037:飞机以真空速180千米/小时,坡度15°进近转弯,则转弯诸元为:(A) 半径900米,转90°弯需30秒(B) 半径950米,转90°弯需30秒(C) 半径1000米,转90°弯需35秒(D) 半径1000米,转90°弯需30秒B 16038:气压式高度表通过测量大气的什么参数来反映飞行高度:(A) 大气密度 (B) 大气压力 (C) 大气温度 (D) 大气湿度A 16039:气压高度表拨正值QFE的含义是什么:(A) 场面气压 (B) 场面气压高度 (C) 海面气压 (D) 海压高度B 16040:气压式高度表拨正值为QNH,则高度表指示:(A) 海面气压 (B) 修正海平面高度 (C) 场压高度 (D) 零点高度C 16041:飞行高度层(FL)的基准面为:(A) 机场平面 (B) 平均海平面(C) 1013.2hPa气压面 (D) 修正海平面气压面D 16042:标准海平面气压760mmHg相当于多少inHg和多少hpa:(A) 29inHg, 1013hpa (B) 29.92inHg, 1000hpa(C) 29.29inHg, l013.2hpa (D) 29.92inHg, 1013.2hpaB 16043:某机场标高2030米,按零点高度着陆(高度表拨正值为QNEI013.2mb)如果当时的QNH值小于1013.2mb,零点高度与机场标高是否相等:(A) 相等,即着陆时高度表指示2030米(B) 零点高度大于机场标高(C) 零点高度小于机场标高(D) 不管QNH如何,着陆时高度表均指示零C 16044:飞机进场着即时,地面通报的场压为“990Hpa”,飞行人员误订为“1000Hpa”时,当飞机过远台高度表指示400米时,实际高度是多少:(直递减率IHPa/甩8米)(A) 400米 (B) 480米 (C) 320米 (D) 420米C 16045:飞机在3000米飞行高度层的等待空域飞行,机场标商500米,地面通报QNH=913.2mb,相对高度是多少: (气压垂直递减率Imb/8.25米)(A) 2500米 (B) 2175米 (C) 1675米 (D) 2675米A 16046:飞机飞行高3050米(QNE),地面通报QNH =770mmHg,当飞机飞越标高为 1859米的山头时,真高是多少: (气压垂直递减率Imm/l0米)(A) 1291米 (B) 8241英尺 (C) 8469英尺 (D) 2675米A 16047:如果空气的实际温度低于标准温度很多,气压式高度表指示2000米,则:(A) 实际高度低于2000米 (B) 实际高度融于20米(C) 实际高度等于2000米 (D) 否能确定B 16048:如果空气的实际温度高于标准温度很多,在专压式高度表指示2000米,则实际高度为:(A) 低于2000米 (B) 高于2000米 (C) 等于2000米 (D) 不能确定C 16049:马赫数(M数)是:(A)飞行高度上的真空速与海平面的音速之比(B)表速与音速之比(C) 飞行高度上的真空速与音速之比(D)表真速与音速之比A 16050:60米大约相当于多少英尺:(A) 200英尺 (B) 180英尺 (C) 220英尺 (D) 18英尺B 16051:100英尺大约相当于多少米:(A) 3米 (B) 30米 (C) 328米 (D) 300米A 16052:飞机保持一定的M数爬升的过程中,指示空速和真空速有何变化:(A) 真空速减小,指示空速更减小(B) 真空速增大,指示空速也有所增大(C) 真空速增大,指示空速不变(D) 真空速不变,指示空速减小B 16053:风角是指哪两条线的夹角:(A) 风向线和经线 (B) 风向线和航迹线(C) 风向线和航向线 (D) 风向线和航线D 16054:偏海是特哪两条线的夹角?以哪一条线为基准:(A) 航迹线和航线,以航线为基准(B) 航迹线和航向线,以航迹线为基准(C) 航线和航向线,以航向线为基准(D) 航迹线与航向线,以航向线为基准B 16055:偏航角是指哪两条线的夹角?以哪一条线为基准:(A) 航线和航向线,以航线为基准(B) 航迹线和航线,以航线为基准(C) 新航线和原航线,以原航线为基准(D) 航迹线和航向线,以航向线为基准C 16056:风角为0°表明:(A) 无风 (B) 正侧风 (C) 顺风 (D) 逆风B 16057:磁差是:(A) 经线和航线的夹角 (B) 磁经线和真经线的夹角(C) 航迹线和真经线的夹角 (D) 磁经线和罗经线的夹角C 16058:成都地区1960年磁差为-1.50,磁差年变率为-0.8/年,2000年的磁差应为:(A) -1.8° (B) -1°82′ (C) -2° 2′ (D) -1°A 16059:磁航线是指:(A) 从航线起点的磁经线北端顺时针量到航线去向的角度(B) 从航线起点的经线北端顺时针量到航线去向的角度(C) 从磁经线北端顺时针量到航线去向的角度(D) 从经线北端量到航线去向的角度A 16060:飞行过程中,飞机左转,则:(A) 明向减小 (B) 航向增大 (C) 航向不变 (D) 无法确定C 16061:预定航线的磁航线角287°,航行风向150°,航线上存在什么侧风:(A) 右侧风 (B) 左侧风 (C) 右逆侧风 (D) 左顺侧风D 16062:预定航线的磁航线角为30°,气象风向为340°,航线上存在什么侧风:(A) 左侧风 (B) 正侧风 (C) 右顺侧风 (D) 左逆侧风B 16063:飞机相对于空气的运动,构成空速向量的元素有:(A) 方向是航向,大小是表速 (B) 方向是航向大小是真空速(C) 方向是风向,大小是风速 (D) 方向是航迹角,大小是地速C 16064:预定航线磁航线角30°,气象风向90°,风速30kt,沿航线飞行风的顺逆风分量和垂直分量各是多少:(A) 右侧风26kt,顺风15kt (B) 左侧风26kt,顺风15kt(C) 右侧风26kt,逆风15kt (D) 侧风15kt,逆风26ktC 16065:预定航线的磁航线角为135°,飞机通过起点后保持平均磁航向130°飞行,测得飞机偏左,并且偏航角为-3°,则偏流是:(A) -8° (B) +8° (C) +2° (D) - 2°D 16066:预计磁航迹3°,平均磁航向355°,实际航迹355 °,偏流几度,偏航角几度,什么侧风:(A) 偏流0°,偏航角-8°,右侧风(B) 偏流+8°,偏航角0°,左侧风(C) 偏流-8°,偏流角0°,右侧风(D) 偏流0°,偏航角-8°,顺逆风或无风C 16067:预计磁航迹268°,测得偏流+8°,偏航角-3°,实际航迹多少,什么侧风:(A) 276°,右侧风 (B) 260°,左侧风(C)265°,左侧风 (D) 271°,右侧风C 16068:飞机保持平均磁航向3000,表速360千米/小时飞行, FL5400米,TH-10°,测得偏流+50,地速460千米/小时,风向(去向)和风速约是多少:(A) 322°, 105千米/小时 (B) 312°,105千米/小时(C)60°,46千米/小时 (D) 244°,48千米/小时C 16069:飞机保持平均磁航向25°,表速135海里/小时飞行,飞行高度层FL15700英尺,空中气温等于该高度的标准气温,测得偏流地速为153海里/小时,风向 (来向)和风速大约是多少:(A) 343°,30海里/小时 (B) 327°,31海里/小时(C) 67°,31海里/小时 (D) 75°,40海里/小时D 16070:飞机保持预定航向和真空速成飞行,测得偏流为+10°,地速等于真空速,什么样的侧风:(A) 无风 (B) 左侧风 (C) 正侧风 (D) 左正侧风B 16071:飞机保持预定航向和真空速飞行,测出偏流0°,真空速小于地速,什么样的侧风:(A) 无风 (B) 顺风 (C)逆风 (D) 正侧风C 16072:从广汉到遂宁,磁航线角为116°,如果此时偏流为-3°,则广汉到遂宁的应飞航向为:(A) 113° (B) 116° (C) 119° (D) 以上都不对B 16073:在同一航向、风向、风速条件下,真空速增大,则:(A) 地速增大,偏流增大 (B) 地速增大,偏流减小(C) 地速增大,偏流不变 (D) 地速减小,偏流增大B 16074:夏延ⅢA飞机起飞时,携带燃油2000公斤,空中平均耗油率320公斤每小时,平均地速400千米每小时,则飞机最大航程约为:(A) 2000千米 (B) 2580千米 (C) 2300千米 (D) 以上都不正确A 16075:如果航向、空速、风向不变,当风速增大时,则:(A) 偏流增大,地速在顺侧风时增大 (B) 偏流增大,地速增大(C) 偏流减小,地速减小 (D) 偏流增大,地速不变C 16076:如果航向、空速、风向不变,当风速减小时,则:(A) 偏流减小,地速在顺侧风时增大 (B) 偏流减小,地速不变(C) 偏流减小,地速在逆侧风时增大 (D) 偏流减小,地速在逆侧风时减小B 16077:如果航向、空速、风向不变,飞机接近顺逆风飞行,风速变化,主要引起:(A) 偏流变化 (B) 地速变化 (C) 风角变化 (D) 航迹变化A 16078:如果航向、空速、风向不变,飞机接近正侧风飞行,风速变化主要引起:(A) 偏流变化 (B)地速变化 (C) 风角变化 (D) 以上都不对B 16079:飞机保持一定的航向和真空速接近顺逆风飞行时,如果风速不变,风向略有变化主要引起:(A) 地速变化 (B) 偏流变化 (C) 航线变化 (D) 以上都不正确A 16080:飞机保持一定的航向和真空速在接近正侧风飞行时,如果风速不变,风向变化主要引起:(A) 地速变化 (B) 偏流变化 (C) 风角变化 (D) 航迹变化C 16081:下列哪一个说法是正确的:(A) 航行风向和气象风向相关90°(B) 航行风向和气象风向相关180°(C) 航行风向和气象风向相差± 180°(D) 航行风向和气象风向无关D 16082:偏流与偏航的主要区别是:(A) 航迹原因不同 (B) 航线不同(C) 航向不同 (D) 产生原因、基准线及正负号的含义不同.B 16083:从成都飞往西安,五凤溪至宁陕段的磁航线角为52°,预计偏流+6°,则:(A) 应飞真航向为46° (B) 应飞磁航向为46°(C) 应飞真航向为58° (D) 应飞磁航向为58°D 16084:推测飞机位置,必须掌握:(A) 飞机的偏流 (B) 飞机航线(C) 飞机油量 (D) 飞机的推测起点、飞机航迹、地速和飞行时间D 16085:飞机产生偏航的原因是:(A) 正确过起点忘记时(B) 空中没有保持好速度(C) 空中风资料超过一小时(D) 没有正确通过起点,没有保持好航向,空中风发生变化C 16086:飞行中,保持好航行诸元,左侧风飞机偏左,表明:(A) 对风的修正正确 (B) 对风的修正过小(C) 对风的修正过大 (D) 修正反了D 16087:飞行中,保持好航行诸元,左侧风飞机偏右,表明:(A) 对风修正正确 (B) 对风修正反了(C) 对风修正过大 (D) 对风修正过小A 16088:飞行中,保持好航行诸元,右侧风飞机不偏,表明:(A) 对风修正正确 (B) 对风修正反了(C) 对风修正过大 (D) 对风修正过小B 16089:飞行中,保持好航行诸元,空中测得偏流+5°,偏航角+3°,表明:(A) 航迹偏在航线的上风面 (B) 航迹偏在航线的下风面(C) 航迹与航线重合 (D) 无法判定航迹偏在哪面A 16090:飞行中,保持好航行诸元,空中测得偏流-8°,飞机偏右偏航角为+5°,表明航线上有:(A) 右侧风 (B) 左侧风 (C) ) 顶风 (D) 逆风A 16091:磁航线角300°,飞机人航后保持预计磁航向310°飞行,测得偏航角+30,表明:(A) 偏流修正过大 (B) 偏流修正过小(C) 偏流修正反了 (D) 偏流修正正确B 16092:磁航线角200°,飞机人航后保持预计磁航向195°飞行,测得飞机偏右,偏航角+10°,表明:(A) 偏流修正过大 (B) 偏流修正过小(C) 偏流修正反了 (D) 偏流修正正确A 16093:飞行中,保持好航行诸元,空中测得偏流-6°,偏航角+5°,表明:(A) 偏流修正过大 (B) 偏流修正过小(C) 偏流修正反了 (D) 偏流修正正确B 16094:A、B两机在同一航线上相对飞行,A机地速500千米/小时,预计10:05,飞越航路点P;B机地速420千米/小时,预计10:16,飞越同一航路点,求两机相遇时刻:(A) 10:21 (B) 10:10 (C) 10:22 (D) 10:11C 16095:同航线同方向飞行的两架飞机,前机地速为500千米/小时, 13:19飞越航路点 P;后机地速800千米/小时, 13:25飞越同一航路点P,问后机追上前机的时刻:(A) 13:30 (B) 13:29 (C) 13:35 (D) 13:32D 16096:电台相对方位角是:(A) 无线电方位线向经线的夹角(B) 无线电方位线同航线的夹角(C) 无线电方位线同航向线的夹角(D) 航向线顺时针量到无线电方位线的角度C 16097:电台方位角是:(A) 无线电方位线同经线的夹角(B) 无线电方位线同航向线的夹角(C) 飞机所在位置的经线北端顺时针量到无线电方位线的角度(D) 电台所在位置的经线北端顺时针量到无线电方位线的角度D 16098:飞机方位角是:(A) 经线北端顺时针量到无线电方位线的角度(B) 航向线顺时针量到无线电方位线的角度(C) 飞机所在位置的经线北端顺时针量到无线电方位线的角度(D) 电台所在位置的经线北端顺时针量到无线电方位线的角度C 16099:飞机保持一定的航向飞行,如果电台在右边,方位角变化关系是:(A) 电台方位、飞机方位不变,相对方位减小(B) 电台方位、飞机方位、相对方位都减小(C) 电台方位、飞机方位、相对方位都增大(D) 电台方位、飞机方位不变,相对方位增大A 16100:飞机保持一定的航向飞行,如果电台在左边,方位角变化关系是:(A) 电台方位、飞机方位、相对方位都减小(B) 电台方位、飞机方位、相对方位都增大(C) 电台方位、飞机方位不变,相对方位减小(D) 电台方位、飞机方位不变,相对方位增大B 16101:飞机左转至向台的过程中,方位角变化关系是:(A) 航向减小,相对方位、电台方位、飞机方位增大(B) 航向、电台方位、飞机方位减小,相对方位增大(C) 航向、电台方位、飞机方位、相对方位都减小(D) 以上都不正确C 16102:飞机右转至向台的过程中,方位角变化关系是:(A) 航向、相对方位、电台方位、飞机方位都减小(B) 航向、相对方位、电台方位、飞机方位都增大(C) 航向、电台方位、飞机方位都增大,相对方位减小(D) 航向、电台方位、飞机方位都减小,相对方位增大D 16103:无线电磁指示器RMI:(A) 可以指示航向和电台相对方位(B) 只能指示电台相对方位(C) 指示磁航向和电台真方位(D) 指示磁航向、电台磁方位(指铲头部)和飞机磁方位(指针尾部)C 16104:无线电磁指示器RMI:(A)只能接收和指录VOR台的方位(B)只能接收和指示NOB台的方位(C)根据选择,可以接收和指示VOR台或NOB台的方位(D)根据选择,既可接收和指示VOR台或NDB台的方位,还能接收和指示盲降系统ILS的航向道B 16105:测距仪OME的用途是:(A) 测量飞机到测距台的水平距离 (B) 测量飞机到测距台的斜距(C) 测量飞机到跑道入口的距离 (D) 测量飞机到着陆点的距离C 16106:测距仪最多可以同时供多少架飞机询问测距:(A) 50架 (B) 80架 (C) 100架 (D) 150架A 16107:飞机保持磁航向60°沿磁航线角70°的航线作向台飞行,测得电台磁方位角为73°,则:(A) 飞机偏左,偏离角为-3° (B) 飞机偏左,偏航角为-3°(C) 飞机偏右,偏离角为+3° (D) 飞机偏右,偏航角为+3°A 16108:飞机保持磁航向230°沿磁航线角220°的航线飞行,已知预定方位线的电台磁方位130°,这时空中测得电台磁方位130°,说明:(A) 飞机到方位线上 (B) 己飞过预定方位线(C) 还没有到达预定方位线 (D) 无法判定A 16109:飞机正确飞越电台上空后,保持一定航向作直线飞行或平直飞行,飞机所在的方位线就是:(A) 飞机的平均航迹线 (B) 飞机修正航迹时的新航线(C) 飞机的航向线 (D) 航线C 16110:飞机正确飞越电台上空后,保持平均磁航向90°沿磁航线角104°航线飞行一段时间后,测得飞机磁方位100°,则:(A) 偏流-10°,偏航角-4° (B) 偏流-10°,偏航角+4°(C) 偏流+10°,偏航角-4° (D)偏流+10°,偏航角+4°D 16111:太原飞石家庄,磁航线角为71°,飞机正确过台后,保持平均磁航向65°飞行,预计太原到石家庄需飞行40分钟,飞行15分钟后,测得飞机磁方位75°判断偏航并修正航迹:(A) 飞机偏左,修正后,保持应飞磁航向59°飞行(B) 飞机偏左,修正后,保持应飞磁航向71°飞行(C) 飞机偏右,修正后,保持应飞磁航向71°飞行(D) 飞机偏右,修正后,保持应飞磁航向54°飞行D 16112:仪表进近程序的飞机分类是以飞机的入口速度Vat为依据的,入口速度Vat的含义是:(A) 飞机相对于空气的速度(B) 在起飞过程中,当一台发动机突然失效时,决定继续起飞或中止起飞的速度(C) 在起飞过程中,允许飞行员开始抬前轮的速度(D) 标准条件下,飞机最大允许着陆重量在着陆形态下的失速速度的1.3倍C 16113:最后进近规定的下降梯度为5.2%,当最后进近的速度200千米/小时应保持多大的下降率下降:(A) 5.2米/秒 (B) 3.7米/秒 (C) 2.9米/秒 (D) 10米/秒A 16114:最后进近规定的下降梯度为5%,当最后进近的速度为50米/秒,应保持多大的下降率下降:(A) 500英尺/分钟 (B) 450英尺/分钟(C) 520英尺/分钟 (D) 550英尺/分钟C 16115:某非精密进近最后进近的下降梯度4.8%,DME台在跑道入口,进近中,机载 DME显示2.43时,相应的相对高度约是多少:(A) 201米 (B) 216米 (C) 231米 (D) 246米D 16116:非精密进近程序,当飞机下降到最低下降高(MDH)时,如果不能建立目视参考,应:(A) 立即复飞(B) 继续下降直到找到目视参考(C) 保持最低下降高飞行(D) 保持最低下降高至复飞点,如果仍未找到目视参考,应复飞A 16117:飞机精密进近下降到决断高(DH)时,如果不能建立目视参考,应当:(A) 立即复飞 (B) 继续下降直到找到目视参考(C) 保持决断高飞行 (D) 保持决断高至复飞点复飞A 16118:某等待程序出航航迹60°,飞机正以90°航向向定位点飞行,这时,飞机处在哪一扇区,怎样加入:(A) 飞机处在第一扇区,平行进入 (B) 飞机处在第一扇区,可以偏置进入(C) 飞机处在第二扇区,偏置进入 (D) 飞机处在第三扇区,直接进入C 16119:标准等待程序出航时间规定是:(A) 不论高度如何都飞行1分钟(B) 不论高度如何都飞行1.5分钟(C) 14000英尺(4250米)以下1分钟, 14000英尺(4250米)以上1.5分钟(D) 14000英尺以下1分钟,20000英尺以上2分钟,30000英尺上以3分钟。
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。