PWM死区时间
- 格式:docx
- 大小:91.20 KB
- 文档页数:2

PWM电压型变频器死区效应理论分析和补偿策略及仿真一、本文概述Overview of this article随着电力电子技术的快速发展,PWM(脉冲宽度调制)电压型变频器在工业控制领域的应用越来越广泛。
然而,在实际应用中,PWM电压型变频器常常面临死区效应的问题,这不仅影响了变频器的控制精度,还可能引发系统的不稳定。
因此,对PWM电压型变频器的死区效应进行深入的理论分析,并探索有效的补偿策略,对于提高变频器的性能具有重要的理论价值和实际应用意义。
With the rapid development of power electronics technology, the application of PWM (pulse width modulation) voltage source inverters in the field of industrial control is becoming increasingly widespread. However, in practical applications, PWM voltage type inverters often face the problem of dead zone effect, which not only affects the control accuracy of the inverter, but also may cause system instability. Therefore, conducting in-depth theoretical analysis on the dead zoneeffect of PWM voltage type inverters and exploring effective compensation strategies have important theoretical value and practical application significance for improving the performance of inverters.本文首先介绍了PWM电压型变频器的基本原理和死区效应的产生原因,分析了死区效应对变频器性能的影响。

ncp1034芯片死区计算
NCP1034芯片是一种高性能PWM控制器,常用于电源管理和电源转换应用中。
死区时间是指在电路中为了防止功率晶体管或MOSFET同时导通而引起的瞬态故障而设置的一段时间间隔。
在PWM 控制器中,死区时间的设置对于电路的稳定性和效率至关重要。
要计算NCP1034芯片的死区时间,首先需要确定一些参数,包括开关频率、MOSFET的特性和工作环境等。
一般来说,死区时间可以通过以下公式计算:
死区时间 = (死区比例 1/开关频率)。
其中,死区比例是一个在0到1之间的比例系数,通常由厂家提供或者根据具体的电路设计经验确定。
开关频率是PWM控制器的工作频率,通常由设计要求或者具体应用决定。
另外,NCP1034芯片可能还提供了一些内部的死区时间控制功能,可以通过外部电阻或电容进行调节。
在实际应用中,可以根据具体的设计要求和电路特性来确定死区时间的具体数值。
需要注意的是,在计算死区时间时,还需要考虑到电路中的延迟时间、过渡时间等因素,以确保死区时间的设置能够有效地防止功率晶体管或MOSFET同时导通,从而保证电路的稳定性和可靠性。
总之,针对NCP1034芯片的死区时间计算,需要综合考虑电路参数、控制器特性和实际应用需求,通过合理的计算和调试来确定最佳的死区时间设置。

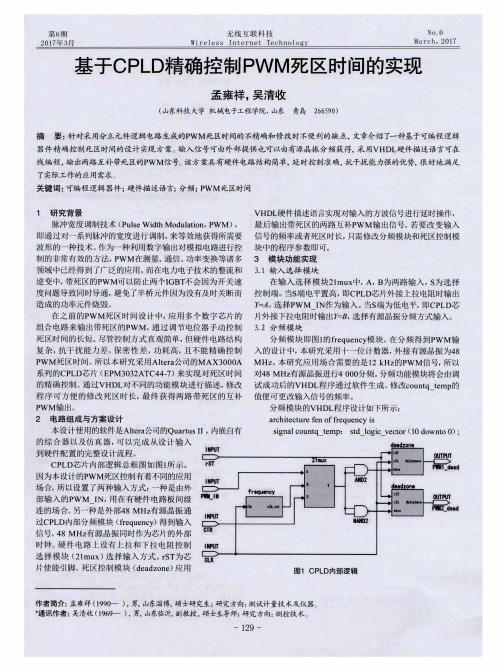
基于CPLD精确控制PWM死区时间的实现孟雍祥;吴清收【摘要】针对采用分立元件逻辑电路生成的PWM死区时间的不精确和修改时不便利的缺点,文章介绍了一种基于可编程逻辑器件精确控制死区时间的设计实现方案.输入信号可由外部提供也可以由有源晶振分频获得,采用VHDL硬件描述语言可在线编程,输出两路互补带死区的PWM信号.该方案具有硬件电路结构简单,延时控制准确,抗干扰能力强的优势,很好地满足了实际工作的应用需求.【期刊名称】《无线互联科技》【年(卷),期】2017(000)006【总页数】3页(P129-131)【关键词】可编程逻辑器件;硬件描述语言;分频;PWM死区时间【作者】孟雍祥;吴清收【作者单位】山东科技大学机械电子工程学院,山东青岛 266590;山东科技大学机械电子工程学院,山东青岛 266590【正文语种】中文脉冲宽度调制技术(Pulse Width Modulation,PWM),即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形的一种技术。
作为一种利用数字输出对模拟电路进行控制的非常有效的方法,PWM在测量、通信、功率变换等诸多领域中已经得到了广泛的应用。
而在电力电子技术的整流和逆变中,带死区的PWM 可以防止两个IGBT不会因为开关速度问题导致同时导通,避免了半桥元件因为没有及时关断而造成的功率元件烧毁。
在之前的PWM死区时间设计中,应用多个数字芯片的组合电路来输出带死区的PWM,通过调节电位器手动控制死区时间的长短。
尽管控制方式直观简单,但硬件电路结构复杂,抗干扰能力差,保密性差,功耗高,且不能精确控制PWM死区时间。
所以本研究采用Altera公司的MAX3000A系列的CPLD芯片(EPM3032ATC44-7)来实现对死区时间的精确控制。
通过VHDL对不同的功能模块进行描述,修改程序可方便的修改死区时长,最终获得两路带死区的互补PWM输出。
本设计使用的软件是Altera公司的Quartus II ,内嵌自有的综合器以及仿真器,可以完成从设计输入到硬件配置的完整设计流程。

PWM“死区”的概念和基本原理PWM(Pulse Width Modulation,脉宽调制)可以用于控制电机、灯光等设备的亮度和运动速度。
在PWM控制中,通常会引入“死区”(Dead Zone)的概念,以确保对控制信号进行适当的滤波,避免意外的电流、电压突变,保护电路元件。
死区的基本原理是通过在PWM周期的过渡阶段,在两个电平(高电平和低电平)之间引入一个“死区时间”,即两个相邻的PWM信号之间的时间间隔。
在死区时间内,PWM信号停止输出电平,保持在低电平或高电平,直到死区时间结束。
死区时间的引入可以减少由于两个不同电平信号之间的切换速度过快而产生的电流和电压突变。
常见的死区时间选择一般为几十纳秒到几微秒。
也可以在硬件或者软件上进行设置调整。
死区的作用主要有以下几个方面:1.限制电流突变:当PWM信号由高变为低或由低变为高时,如果没有死区时间,信号突然切换可能会导致电流的突变,进而将对电路产生过大的负荷。
引入死区时间可以在过渡阶段平滑地切换信号,减少电流突变,保护电路。
2.防止短路故障:在一些特殊情况下,控制信号的切换可能会导致短路,例如在对有源二极管作反向恢复时,如果没有死区时间,可能会导致交流信号直接通过二极管而短路。
通过引入一个死区时间,确保高电平和低电平之间没有交叉时间,可以避免短路故障的发生。
3.提高输出精度:由于器件的响应时间存在一定的延迟,因此在两个相邻信号切换的过渡阶段,输出信号可能会出现瞬时的不稳定情况。
通过引入死区时间,可以提高输出信号的精度,使其更加稳定。
从实际应用的角度来看,死区时间的选择应根据具体的场景进行调整。
过大的死区时间可能会导致输出信号的精度降低,而过小的死区时间则可能会增加电路中的电流突变和短路故障的风险。
总结起来,死区的概念和基本原理是在PWM控制中引入一个时间间隔,在PWM信号的过渡阶段将信号保持在一个不变的电平。
这样可以限制电流和电压的突变,避免意外的负荷和短路故障,提高输出信号的精度。
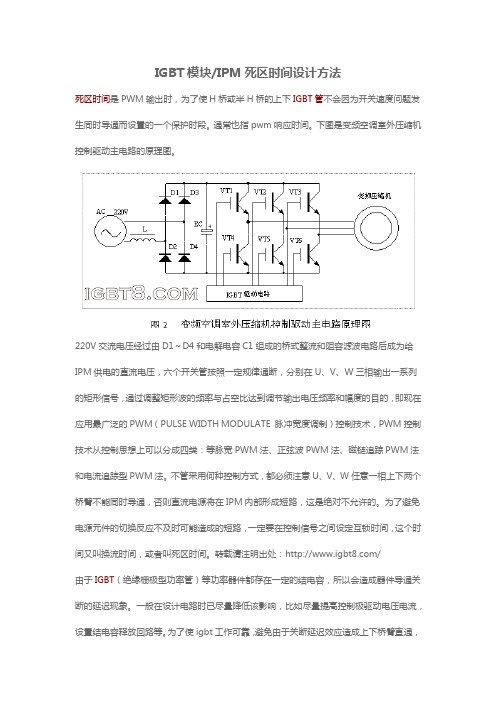
IGBT模块/IPM死区时间设计方法死区时间是PWM输出时,为了使H桥或半H桥的上下IGBT管不会因为开关速度问题发生同时导通而设置的一个保护时段。
通常也指pwm响应时间。
下图是变频空调室外压缩机控制驱动主电路的原理图。
220V交流电压经过由D1~D4和电解电容C1组成的桥式整流和阻容滤波电路后成为给IPM供电的直流电压,六个开关管按照一定规律通断,分别在U、V、W三相输出一系列的矩形信号,通过调整矩形波的频率与占空比达到调节输出电压频率和幅度的目的,即现在应用最广泛的PWM(PULSE WIDTH MODULATE 脉冲宽度调制)控制技术,PWM控制技术从控制思想上可以分成四类:等脉宽PWM法、正弦波PWM法、磁链追踪PWM法和电流追踪型PWM法。
不管采用何种控制方式,都必须注意U、V、W任意一相上下两个桥臂不能同时导通,否则直流电源将在IPM内部形成短路,这是绝对不允许的。
为了避免电源元件的切换反应不及时可能造成的短路,一定要在控制信号之间设定互锁时间,这个时间又叫换流时间,或者叫死区时间。
转载请注明出处:/由于IGBT(绝缘栅极型功率管)等功率器件都存在一定的结电容,所以会造成器件导通关断的延迟现象。
一般在设计电路时已尽量降低该影响,比如尽量提高控制极驱动电压电流,设置结电容释放回路等。
为了使igbt工作可靠,避免由于关断延迟效应造成上下桥臂直通,有必要设置死区时间,也就是上下桥臂同时关断时间。
死区时间可有效地避免延迟效应所造成的一个桥臂未完全关断,而另一桥臂又处于导通状态,避免直通炸模块。
死区时间大,模块工作更加可靠,但会带来输出波形的失真及降低输出效率。
死区时间小,输出波形要好一些,只是会降低可靠性,一般为us级。
一般来说死区时间是不可以改变的,只取决于功率元件制作工艺!死区时间是指控制不到的时间域。
在变频器里一般是指功率器件输出电压、电流的“0”区,在传动控制里一般是指电机正反向转换电压、电流的过零时间。
Cube MX 是一个用来生成初始化代码的图形化配置工具,用于STM32 微控制器。
PWM(脉宽调制)技术则是一种通过改变信号的占空比来控制电机或灯光等设备的技术。
而死区时间单位则是在PWM 控制中非常重要的一个参数。
在这篇文章中,我将深入探讨Cube MX 中 PWM 死区时间单位的作用和使用。
让我们来了解一下 Cube MX 中 PWM 的概念。
PWM 技术是通过控制信号的占空比来控制电机或其他设备的工作方式的一种技术。
在Cube MX 中,我们可以通过简单的拖拽和配置来生成 PWM 的初始化代码,从而实现对 STM32 微控制器中 PWM 输出信号的控制。
然而,要想实现对设备精确的控制,就需要考虑到死区时间单位的设置。
那么,什么是死区时间单位呢?死区时间单位是用来防止功率半桥或全桥的 MOSFET、IGBT 等功率器件因为导通时间过长导致短路或损坏的时间保护参数。
在 PWM 控制中,设置合适的死区时间单位可以有效地避免开关器件之间出现短路,提高系统的可靠性和稳定性。
在 Cube MX 中,我们可以通过配置死区时间单位来实现对 PWM 输出的精确控制。
在配置 PWM 时,我们可以指定死区时间的大小,通常以微秒为单位。
通过设置适当的死区时间单位,可以确保在 PWM输出信号切换时不会出现因为开关延迟而导致的短路情况,从而保护电路和设备的安全。
除了保护设备安全外,合理设置死区时间单位还可以提高系统的效率和稳定性。
通过合理设置死区时间单位,可以避免因为开关器件导通延迟而造成的能量损耗和效率下降。
通过设置合适的死区时间单位,可以避免因为开关器件导通时间不一致而引起的输出信号波形失真和系统调节不稳定等问题。
Cube MX 中的 PWM 死区时间单位是一个非常重要的参数,它不仅可以保护设备的安全,提高系统的效率和稳定性,还可以实现对设备的精确控制。
在实际应用中,需要根据具体的设备和系统要求来合理设置死区时间单位,以实现最佳的控制效果。
PWM逆变器死区效应的补偿1引言在PWM三相逆变器中,由于开关管存在一定的开通和关断时间,为防止同一桥臂上两个开关器件的直通现象,控制信号中必须设定几个微秒的死区时间。
尽管死区时间非常短暂,引起的输出电压误差较小,但由于开关频率较高,死区引起误差的叠加值将会引起电机负载电流的波形畸变,使电磁力矩产生较大的脉动现象,从而使动静态性能下降,降低了开关器件的实际应用效果。
本文从分析死区效应的产生机理入手,寻求死区效应的补偿方法。
2死区效应的产生利用逆变器中的一个桥臂(。
由图2可见,输出理想波与实际波之间将会引起误差波。
若忽略开关器件的存储时间及脉冲上升与下降时间,误差波可认为是矩形波。
图1逆变器的一个桥臂图2死区误差及矫正波形图3死区效应的补偿3 1调整参考波形的补偿方法假定开关频率远大于基波频率,输出电流为正弦波,每一死区引起的电压误差近似相等,则死区时间对基波电压的影响可用电流正负半周的平均电压误差来表示。
每个死区的误差波面积为:Δe=tdUd(1)式中:td——死区时间(μs)Ud——直流电源电压(V)则在每一个基波周期内的误差平均值为:ΔU=sign(i)Ud(2)式中:M——每一个周期内开关的次数T——基波周期(μs)可见,电压损失与电流幅度无关,与电流方向有关。
平均误差电压对逆变器影响的波形。
其中ur为理想基波。
若负载为感性,则电流滞后ur的角度为φ′。
平均误差电压ΔU为矩形波,与电流i成反向关系,分解后基波为Δu1。
则实际基波电压u1为理想基波ur与误差基波Δu1的叠加。
互补带死区pwm芯片
互补带死区PWM芯片是一种用于控制电机驱动器和其他电源应
用的集成电路。
它们通常被用于控制直流电机、步进电机和其他类
型的电机,以及用于电源转换器和逆变器等应用。
这些芯片通常包
含多个PWM输出通道,以便可以同时控制多个电机或多个功率开关。
这些芯片的主要特点之一是它们具有互补输出阶段,这意味着
它们可以控制两个互补的功率开关,如N沟MOSFET和P沟MOSFET。
这种设计可以提供更高的效率和更低的功耗,因为它可以更有效地
控制功率开关的导通和关断时间。
另一个重要的特点是死区时间的控制。
死区时间是指在两个互
补的功率开关同时导通或关断的时间间隔,以避免它们同时导通而
导致短路。
互补带死区PWM芯片通常具有内置的死区时间生成电路,可以确保在控制功率开关时避免这种情况发生,从而提高系统的可
靠性和安全性。
此外,这些芯片通常还具有丰富的保护功能,如过流保护、过
压保护和过温保护,以确保系统在各种工作条件下都能稳定可靠地
工作。
总的来说,互补带死区PWM芯片在电机驱动和电源控制应用中扮演着重要的角色,通过其互补输出阶段、死区时间控制和丰富的保护功能,可以帮助设计工程师实现高效、可靠的电机控制和功率转换。
cube mx pwm死区时间单位摘要:1.引言2.cube MX PWM 简介3.死区时间单位的概念4.死区时间单位的影响因素5.如何选择合适的死区时间单位6.总结正文:【引言】cube MX PWM(脉冲宽度调制)是一种广泛应用于电机控制、电源管理和电子制造领域的技术。
死区时间单位作为PWM 参数的重要组成部分,直接影响到系统的性能。
本文将详细介绍cube MX PWM 死区时间单位的相关知识。
【cube MX PWM 简介】cube MX 是一款由STMicroelectronics 公司开发的PWM 软件库,它为各种微控制器提供了一套完整的PWM 解决方案。
通过简单的配置,用户可以实现各种复杂的PWM 功能,如占空比控制、频率设置、死区时间设置等。
【死区时间单位的概念】死区时间单位(或称死区时间间隔)是指在PWM 信号中,两个相邻脉冲之间的时间间隔。
这个间隔对于保证系统的稳定性和减小干扰信号非常重要。
死区时间单位越小,系统的响应速度越快,但同时也会降低系统的稳定性。
【死区时间单位的影响因素】死区时间单位受到以下几个因素的影响:1.控制器的性能:高性能的控制器可以实现更小的死区时间单位。
2.电源电压:电源电压的稳定性直接影响到PWM 信号的稳定性,从而影响死区时间单位的设置。
3.负载特性:不同的负载特性对死区时间单位的要求也不同。
例如,对于电感性负载,需要较大的死区时间单位以减小电磁干扰;而对于电容性负载,则需要较小的死区时间单位以提高系统响应速度。
【如何选择合适的死区时间单位】选择合适的死区时间单位需要综合考虑上述因素。
在实际应用中,可以先设定一个较大的死区时间单位,然后根据系统的响应和稳定性逐步调整,以达到最佳的性能。
【总结】cube MX PWM 死区时间单位是PWM 控制中一个重要的参数,需要根据系统的具体情况进行设置。
死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段。
通常也指pwm响应时间。
由于IGBT(绝缘栅极型功率管)等功率器件都存在一定的结电容,所以会造成器件导通关断的延迟现象。
一般在设计电路时已尽量降低该影响,比如尽量提高控制极驱动电压电流,设置结电容释放回路等。
为了使igbt工作可靠,避免由于关断延迟效应造成上下桥臂直通,有必要设置死区时间,也就是上下桥臂同时关断时间。
死区时间可有效地避免延迟效应所造成的一个桥臂未完全关断,而另一桥臂又处于导通状态,避免直通炸模块。
死区时间大,模块工作更加可靠,但会带来输出波形的失真及降低输出效率。
死区时间小,输出波形要好一些,只是会降低可靠性,一般为us级。
一般来说死区时间是不可以改变的,只取决于功率元件制作工艺!
死区时间是指控制不到的时间域。
在变频器里一般是指功率器件输出电压、电流的“0”区,在传动控制里一般是指电机正反向转换电压、电流的过零时间。
死区时间当然越小越好。
但是所以设置死区时间,是为了安全。
因此又不可没有。
最佳的设置是:在保证安全的前提下,越小越好。
以不炸功率管、输出不短路为目的(baidu的)
死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段,所以在这个时间,上下管都不会有输出,当然会使波形输出中断,死区时间一般只占百分之几的周期。
但是PWM波本身占空比小时,空出的部分要比死区还大,所以死区会影响输出的纹波,但应该不是起到决定性作用的。
死区,简单解释:通常,大功率电机、变频器等,末端都是由大功率管、IGBT等元件组成的H桥或3相桥。
每个桥的上半桥和下半桥是是绝对不能同时导通的,但高速的PWM驱动信号在达到功率元件的控制极时,往往会由于各种各样的原因产生延迟的效果,造成某个半桥元件在应该关断时没有关断,造成功率元件烧毁。
死区就是在上半桥关断后,延迟一段时间再打开下半桥或在下半桥关断后,延迟一段时间再打开上半桥,从而避免功率元件烧毁。
这段延迟时间就是死区。
(就是上、下半桥的元件都是关断的)死区时间控制在通常的低端单片机所配备的PWM中是没有的。
PWM的上下桥臂的三极管是不能同时导通的。
如果同时导通就会是电源两端短路。
所以,两路触发信号要在一段时间内都是使三极管断开的。
这个区域就叫做“死区”优点就不用说了。
缺点是使谐波的含量有所增加。