基于限滑差速器驱动的防滑控制
- 格式:pdf
- 大小:328.60 KB
- 文档页数:7
防滑差速器的工作原理防滑差速器,顾名思义是用来防止车辆在行驶过程中出现打滑的一种装置。
它的工作原理是利用差速器的差速调节功能,通过在轮胎间分配扭矩的方式,使车辆能够更好地适应不同路面的摩擦情况,提高车辆的稳定性和操控性。
差速器是一种能够将发动机的扭矩传递给车轮的装置,它位于驱动轴上,连接着两个车轮。
在正常行驶情况下,差速器会按照一定的比例将扭矩分配给两个车轮,使车辆能够平稳地行驶。
然而,在某些特殊情况下,比如在拐弯或者一个车轮遭遇到阻力较大的情况下,差速器可能会出现扭矩分配不均的问题,导致车辆出现打滑。
防滑差速器的作用就是在发生打滑时能够及时地调整扭矩的分配,使车辆能够稳定地行驶。
它一般由液压、电子或机械元件组成,可以根据车辆的行驶状态和路面情况来调整扭矩的分配比例。
液压式防滑差速器是一种常见的防滑差速器,它通过液压油的流动来调节扭矩的分配。
当车辆发生打滑时,液压差速器会根据车轮的转速差异来判断哪个车轮打滑,然后通过控制液压油的流动来调整扭矩的分配比例,使打滑车轮获得更多的扭矩,从而恢复车辆的稳定性。
电子式防滑差速器则是利用电子传感器来监测车轮的转速,当发现车轮打滑时,通过电子控制单元来调节扭矩的分配。
电子式防滑差速器具有反应速度快、调节精度高的特点,可以根据不同的驾驶环境和路面情况进行智能调节,提供更好的操控性能。
机械式防滑差速器是一种较为简单的结构,它通过机械齿轮的装置来实现扭矩的分配调节。
当车辆发生打滑时,机械式防滑差速器会根据车轮的转速差异来判断哪个车轮打滑,并通过机械齿轮的作用来调节扭矩的分配比例。
除了以上几种常见的防滑差速器,还有一些其他的技术也可以用来实现防滑功能,比如牵引力控制系统、车载动力控制系统等。
这些系统通过监测车轮的转速、制动压力等参数,来实时调节扭矩的分配,从而提供更好的防滑效果。
总的来说,防滑差速器是一种重要的车辆安全装置,它能够有效地防止车辆在行驶过程中出现打滑的情况,提高车辆的稳定性和操控性。
防滑差速器工作原理
防滑差速器是一种用于汽车驱动系统的重要部件,可以有效地防止车辆在行驶过程中发生滑动,提高驱动力的传递效率。
其工作原理主要是基于差速器的独立行动能力和滑差的分配。
差速器是一种通过齿轮传动的装置,通常由主动齿轮和被动齿轮组成。
当车辆转弯时,内外轮胎行驶的距离不同,内轮胎行驶的距离较短,外轮胎行驶的距离较长。
而差速器的作用就是通过两个齿轮的转动配合来实现这种差异。
当车辆直线行驶时,差速器的主动齿轮和被动齿轮以相同的速度旋转,驱动力被均匀地传递到两个车轮上。
而当车辆转弯时,由于内外轮胎行驶距离不同,差速器的主动齿轮会通过齿轮传动将转动力量分配给两个齿轮,使两个车轮的转速发生差异。
这样,内轮胎与外轮胎的转速差异就会得以补偿,使得车辆能够顺利地完成转弯动作。
然而,在某些低摩擦力的路面上,如雪地、冰面等,差速器的工作原理可能会导致车辆发生滑动。
为了解决这个问题,防滑差速器被引入。
防滑差速器通常会采用粘滞耦合器或限滑差速器等机制,能够根据车轮的滑动差异调整差速器的转动阻力,使得驱动力得到更好的分配。
这样就能够有效地提高车辆的抓地力,防止车辆在低摩擦力的路面上发生滑动。
总的来说,防滑差速器的工作原理是通过差速器的独立行动能力和滑差的分配来实现的。
它能够根据车辆行驶状态自动调整驱动力的分配,提高车辆的操作性能和安全性。
限滑差速器原理限滑差速器是一种用于汽车差速器的技术装置,它的出现有效地解决了车辆在转弯或者路面陡坡行驶时出现的车轮打滑问题。
限滑差速器的原理是通过利用差速器的差速作用,使得车轮能够在转向或者路面不平的情况下,能够实现差速,从而避免车轮打滑,提高了车辆的行驶稳定性和通过性。
限滑差速器的原理主要包括以下几个方面:1. 差速器的作用。
差速器是汽车传动系统中的一个重要部件,它的作用是使得车辆在转向或者路面不平的情况下,能够实现车轮的差速。
差速器通过差速齿轮的设计,使得内外两个车轮能够以不同的速度旋转,从而适应车辆在转弯或者路面不平时的行驶需求。
2. 差速锁的应用。
限滑差速器在差速器的基础上加入了差速锁的装置,差速锁的作用是在车轮出现打滑时,能够锁定差速器,使得车轮能够实现同步旋转,从而避免车轮打滑。
差速锁的应用有效地提高了车辆在复杂路况下的通过性能。
3. 液压限滑差速器的工作原理。
液压限滑差速器是一种通过液压控制差速器的装置,它的工作原理是通过液压系统来控制差速器的锁定和释放,从而实现车轮的差速和同步旋转。
液压限滑差速器在车辆行驶时能够根据车轮的转速差异来控制差速器的工作状态,从而保证车辆在复杂路况下的行驶稳定性。
4. 电子限滑差速器的原理。
电子限滑差速器是一种通过电子控制差速器的装置,它的原理是通过车辆的传感器来监测车轮的转速差异,然后通过电子控制单元来控制差速器的锁定和释放,从而实现车轮的差速和同步旋转。
电子限滑差速器能够根据车辆行驶的实际情况来自动调节差速器的工作状态,提高了车辆在复杂路况下的通过性能。
5. 限滑差速器的优势。
限滑差速器的出现有效地解决了车辆在复杂路况下出现的车轮打滑问题,提高了车辆的行驶稳定性和通过性能。
与传统的差速器相比,限滑差速器能够根据车辆行驶的实际情况来自动调节差速器的工作状态,提高了车辆的行驶性能和安全性。
总结:限滑差速器是一种通过差速锁或者液压、电子控制来实现车轮差速和同步旋转的技术装置,它的出现有效地提高了车辆在复杂路况下的行驶稳定性和通过性能。
简述驱动防滑系统的控制方法
驱动防滑系统(ASR)的控制方法主要包括以下几种:
1. 逻辑门限值控制:这种方法不需要建立具体的数学模型,简化了驱动防滑控制器的开发过程。
2. PID控制:这是一种常用的控制方法,通过比例、积分和微分三个环节来调整系统参数,以达到理想的控制效果。
3. 最优控制:这种方法通过优化系统参数,使系统性能达到最优。
4. 神经网络控制:利用神经网络的自学习能力,对系统进行控制。
5. 滑模控制:在系统状态发生变化时,滑模控制能够快速响应并稳定系统。
6. 模型跟踪控制:使控制系统按照预定的模型进行工作,以达到理想的控制效果。
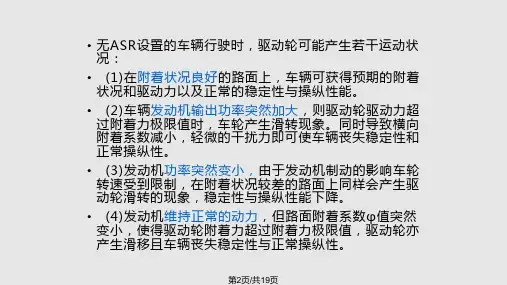
这些控制方法都是为了实现驱动防滑系统的功能,即通过识别路面状态,针对不同路况采用不同的滑转率控制策略,通过限制驱动轮的驱动转矩使车辆能在不同路面上充分利用附着力,防止车辆在驱动力急剧变化中发生驱动轮相对地面产生过度的滑转,从而使车辆轮胎相对地面的附着力降低。
以上内容仅供参考,建议咨询汽车专业技术人员了解具体的控制方法。
限滑差速器功能原理介绍传统的差速器是将驱动力平均地分配到左右两个驱动轮上,这样在转弯时就会产生内外侧轮胎的滑移差异。
而限滑差速器则能够根据不同的驱动条件和路面情况,自动调节驱动力的分配,以确保车辆在各种情况下都能够保持稳定的行驶性能。
首先是启动力分配。
当车辆启动或行驶时,限滑差速器会将一部分驱动力传递到空滑行的驱动轮上,以避免驱动轮的打滑。
该差速器通过采用粘滞耗散和摩擦耗散两种方式来实现此功能。
粘滞耗散是指差速器内部的特殊离合器油包含有摩擦片和粘滞剂,当差速器的内外侧轮速差增大时,粘滞剂会产生黏性阻尼,使其内外侧输出轴的速度差减小,从而实现了启动力的分配。
而摩擦耗散则是通过差速器内部的摩擦片和外侧输出轴的齿轮来实现的,当差速器的内外侧轮速差增大时,摩擦片会受到扭矩的作用,从而使两个驱动轮的扭矩分配不均衡。
其次是转弯力分配。
当车辆行驶过弯道时,内外侧轮胎的速度差会变大,限滑差速器会自动调整驱动力的分配,使得内外侧驱动轮的扭矩分配更加均衡,使得车辆能够更好地保持转弯的稳定性。
此时,差速器内部的粘滞剂和摩擦片会发挥作用,减少内外侧输出轴的速度差。
然而,限滑差速器也存在一些局限性。
由于限滑差速器的工作原理是通过摩擦或粘滞来实现的,所以在长时间高速行驶时,可能会由于差速器内部产生过多的热量,导致差速器过热,降低了其工作效率,甚至可能损坏差速器。
此外,限滑差速器的维护和修理也相对较为复杂,需要定期更换差速器油和检查差速器的工作状态。
总之,限滑差速器是一种能够改善车辆操控性和稳定性的重要装置。
它通过控制驱动力的分配,使得车辆在起步、转弯和行驶过程中能够更好地适应不同的路面状况,提高了车辆的驾驶安全性和行驶平稳性。
汽车驱动防滑控制系统ECU的设计的开题报告一、选题背景随着汽车工业的不断发展,人们对汽车的舒适性、安全性、驾驶性能的要求也越来越高。
但在路面湿滑、结冰等恶劣的天气状况下,汽车的安全性能往往会受到影响。
而驱动防滑控制系统(Electronic Control Unit,简称ECU)的出现,有效地提高了汽车在各种路况下的安全性能,保证驾乘人员的生命安全。
二、课题意义ECU是汽车驱动防滑控制系统的核心部件,它可以通过监测车轮的速度、加速度、转向角等信息,判断车辆是否失控,进而控制发动机输出功率、制动器辅助力矩等,以实现车辆的稳定控制。
因此,对ECU的设计与优化具有极其重要的意义,能够有效提高汽车在各种路况下的驾驶稳定性和安全性能。
三、研究内容本文将以驱动防滑控制系统的ECU为研究对象,结合汽车控制理论和数字信号处理技术,从以下几个方面开展研究:1.分析驱动防滑控制系统的工作原理和结构特点,深入探讨ECU在整个系统中的作用和功能。
2.研究ECU的设计参数,包括传感器的选取、AD转换器的设计、信号滤波器的滤波算法等,对ECU的整体性能进行优化。
3.建立ECU的硬件平台,包括采用单片机或FPGA芯片进行驱动编程设计、编写控制程序,搭建开发环境。
4.测试ECU的运行效果,通过模拟实验或现场测试,评估ECU的控制精度、稳定性、可靠性等性能指标,并对其进行优化改进。
四、研究方法本文将采用基于理论和实践相结合的方法,结合汽车控制理论和数字信号处理技术,通过模拟实验和现场测试等方式深入研究驱动防滑控制系统的ECU设计与优化。
五、论文结构本文将分为五个部分:1.绪论:介绍课题选题的背景和意义,阐述研究内容和研究方法。
2.驱动防滑控制系统的ECU技术原理:分析驱动防滑控制系统的工作原理和结构特点,深入探讨ECU在整个系统中的作用和功能。
3.ECU设计参数的研究:详细阐述ECU的设计参数,包括传感器的选取、AD转换器的设计、信号滤波器的滤波算法等,对ECU的整体性能进行优化。
简述驱动轮防滑转的控制方法
驱动轮防滑转的控制方法主要是通过传感器检测车辆的轮胎滑动
情况,再通过控制车辆的制动系统或发动机输出功率来调节车轮的转速,达到防止车轮滑动的目的。
具体的控制方法包括以下几种:
1. 利用车轮速度传感器来检测轮胎滑动情况,并通过ABS系统
控制车轮刹车压力,防止车轮滑动。
2. 利用车轮传感器检测轮胎转速,当发现车轮转速过快时,通
过发动机控制系统降低发动机输出功率,以减少轮胎的旋转力矩,从
而防止车轮滑动。
3. 在车辆转向时,通过差速器控制车辆左右轮胎的转速差异,
以使车辆更好地适应路况变化,防止车轮滑动。
4. 在某些情况下,如起步或越野行驶时,可以通过电子控制系
统来控制车辆的扭矩分配,以保持车轮的牵引力,防止车轮滑动。
总之,驱动轮防滑转的控制方法是通过不同的控制器和传感器来
实现,以调节车轮的转速和功率输出,防止车轮滑动,保证行车安全。