典型机电一体化系统
- 格式:ppt
- 大小:876.50 KB
- 文档页数:60
机电一体化系统设计一、概论1、机电一体化:是在机械的主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成系统的总称。
2、对检测传感器的要求:要求检测传感器具有高精度、高灵敏度和高可靠性。
3、检测传感技术的主要难点:提高可靠性、精度和灵敏度。
需要研究的问题有:①提高各种敏感材料和元件灵敏度及可靠性②改进传感器结构,开发温度与湿度、视觉与触觉同时存在的符合传感器③研究在线检测技术,提高抗干扰能力④研究具有自动诊断与自动补偿功能的传感器。
4、自动控制:自动控制是指在没有人参与的情况下,通过控制装置使被控制的对象或控制过程自动的按照预定的规律运行。
5、系统总体技术:系统总体技术是一种从整体目标出发,用系统的观点和方法将总体分解成若干功能单元,找出能完成各个功能的技术方案,再把功能与技术方案组合成方案组进行分析、评价和优选的综合应用技术。
6、系统总体技术包括:插件、接口转换、软件开发、微机应用技术、控制系统的成套性和成套设备自动化技术。
7、系统总体技术需要研究的问题:①软件开发与应用技术,包括过程参数应用软件、实时精度补偿软件②研究接插件技术,体改可靠性③通过接口和数据总线标准化④控制系统成套性和成套设备自动化⑤软件的标准化。
8、机电一体化系统由机械系统、信息处理系统、动力系统、传感检测系统、执行元件系统五个系统组成。
9、系统的五种内部功能:即主功能、动力功能、计策功能、控制功能、构造功能。
主功能是实现系统“目的功能”直接必须的功能,主要是对物质、能量、信息及其相互结合进行变换、传递和存储。
动力功能的作用是根据系统内部信息和外部信息对整个系统进行控制,使系统正常运转,实时“目的功能”。
而构造功能则是使构成系统的子系统及元、部件维持所定的时间和空间上的相互关系所必须的功能。
10、机电一体化系统设计的考虑方法同城有:几点互补法、融合法和组合法。
11、系统工程是组织管理系统的规划、研究、设计、制造、试验和使用的科学方法,是一种对所有系统都具有普遍意义的科学方法。
机电一体化系统概述机电一体化系统(Mechatronics System)是指将机械工程、电子工程和控制工程有机结合的一种综合性系统。
它融合了机械结构、传感器、执行器、电机、电子元件、控制系统和计算机等多种技术手段,实现了机械运动、能量转换和信息处理的一种智能化系统。
机电一体化系统的应用领域非常广泛,如机械制造、自动化生产线、汽车工业、航天航空、能源设备等。
机电一体化系统的组成包括多个子系统,如机械结构子系统、电子子系统、能源子系统和控制子系统等。
机械结构子系统主要由机械传动装置、机构部件和传感器等组成,它们协同工作,通过运动变换和能量转换实现特定的机械功能。
电子子系统则负责信号的采集、处理和控制执行器的工作,例如传感器可以感知环境信息,电机可以驱动机械运动。
能源子系统则是为整个系统提供能量,例如电源、电池或气压等。
控制子系统是机电一体化系统的“大脑”,通过对信号的处理和控制算法的实现,实现系统的自动化和智能化。
机电一体化系统的设计和开发需要考虑多种因素。
首先,需要对系统所应用的工作环境进行充分的分析和调研,包括温度、湿度、振动、噪声等,以便选择合适的机械结构和电子元件。
其次,需要对系统的功能要求进行明确,包括速度、精度、负载承载能力等。
此外,还需要对系统的可靠性、可维护性和安全性等进行全面的考虑。
机电一体化系统的应用领域非常广泛。
在机械制造领域,它可以用于自动化生产线的搬运、组装和装配等工作,提高生产效率和质量。
在汽车工业中,机电一体化系统可以实现汽车的自动驾驶和智能控制,提高行车安全性和舒适性。
在航天航空领域,机电一体化系统可以用于飞行器的导航、定位和控制,实现飞行器的自主飞行。
在能源设备领域,机电一体化系统可以用于风力发电、太阳能发电和水力发电等,提高能源利用效率和环境保护。
总之,机电一体化系统是一种综合性的系统,将机械工程、电子工程和控制工程有机结合,实现了机械运动、能量转换和信息处理的一种智能化系统。

6.电液控制系统设计6.1概述电液控制系统是常用机电一体化系统之一。
它是将计算机电控和液压传动结合在一起,既发挥了计算机控制或电控制技术的灵活性,又体现了液压传动的优势,充分显示出大功率机电控制技术的优越性。
电液控制系统的种类很多,可以从不同的角度分类,而每一种分类方法都代表一定的特征:1)根据输入信号的形式和信号处理手段可人为数字控制系统、模拟控制系统、直流控制系统、电液开关控制系统。
2)根据输入信号的形式和信号处理手段可分为数字控制系统、模拟控制系统、直流控制系统、交流控制系统、振幅控制系统、相位控制系统。
3)根据被控量的物理量的名称可分为置控制系统、速度控制系统、力或压力控制系统等。
4)根据动力元件的控制方式可分为阀控系统和泵控系统。
5)根据所采用的反馈形式可分为开环控制系统、闭环系统和半闭环控制系统。
本章主要介绍电液控制系统的组成、控制元件,系统数字模型以及系统的设计。
6.2电液控制元件电液控制元件主要包括电液伺服阀、电液比例阀、电液数字阀以及由数字阀组成的电液步进缸、步进马达、步进泵等。
它胶是电液控制系统中的电-液能量转换元件,也是功率放大元件,它能够将小功率的电信号输入转换为大功率的液压能(流量与压力)或机械能的输出。
在电液控制系统中,将电气部分与液压部分连接起来,实现电液信号的转换与放大,主要有电液伺服阀、电液比例阀、电液数字阀以及各种电磁开关阀等。
电液控制阀是电液控制系统的核心,为了正确地设计和使用电液控制系统,就必须掌握不同类型电液控制阀的原理和性能。
6.2.1控制元件的驱动6.2.1.1电气—机械转换器电气—机械转换器有“力电机(马达)”、“力矩电机(马达)”以及直流伺服电动机和步进电动机等,它将输入的电信号(电流或电压)转换为力或力矩输出,去操纵阀动作,推行一个小位移。
因此,电气-机械转换器是电液控制阀中的驱动装置,其静态特性和动态特性在电液控制阀的设计和性能中都起着重要的作用。
Luzhou Vocational & Technical College实训报告课程名称: 典型机电一体化系统安装与调试班级:姓名:学号:指导教师:机电一体化技术专业2021年6月第一章功能分析1.1 任务要求根据以下要求完成分拣系统的项目组态、变量定义、编写程序、仿真调试、触摸屏控制面板设计,最终能实现在触摸屏上手动控制气缸和电机,同时可以实现自动分拣金属和非金属材料。
编写程序要符合规范,触摸屏界面设计要整齐美观,正确设置各个控件的参数。
1.2 功能要求启动准备条件:急停按钮触发时,所有执行机构输出均无效;所有开关为OFF状态时,且压力达到设定值时,才能启动系统进行手动和自动调试。
输出状态信号:气缸处于伸出状态,且滑台停在1号位时为初始状态(P3灯点亮)。
S3为系统总开关,S4为手动或自动切换开关,S5为自动模式启动开关。
手动模式:S6和S7为手动控制气缸伸出或缩回。
S8和S9为手动控制电机正反转。
电感传感器B11、B12、B13可以检测滑台的位置,P11、P12、P13分别是该位置的指示灯,光电传感器可以检测料仓是否有物料,电感传感器B5可以识别料仓中的金属物料。
1.3 目标实现首先开关切换到自动模式下,电机运动到初始位置1,并且气缸处于伸出状态,P3灯点亮。
按下开关S5启动自动模式P6点亮执行分拣物料时,此时气缸缩回并延时1秒,入料口光电开关检测到有工件,同时安装在入料口的电感传感器检测工件的材质,将检测到的信号传输给PLC。
当在PLC程序的控制交流电机,电机运转驱动,把工件带进分拣区。
如果是金属则进入位置2,P33灯闪烁,如果是非金属则进入位置3,P32灯闪烁。
达到相应位置时,气缸伸出并延时1秒。
每完成一个推料,则返回初始位置。
依次识别完3个物料后停止运行,且P6灯熄灭。
第二章检测记录2.1连续性检测表2.1连续性测量2.2 电压测量表2.2电压测量第三章编程与调试3.1程序编辑控制面板如图3-1所示,面板控制功能如表3-1所示。
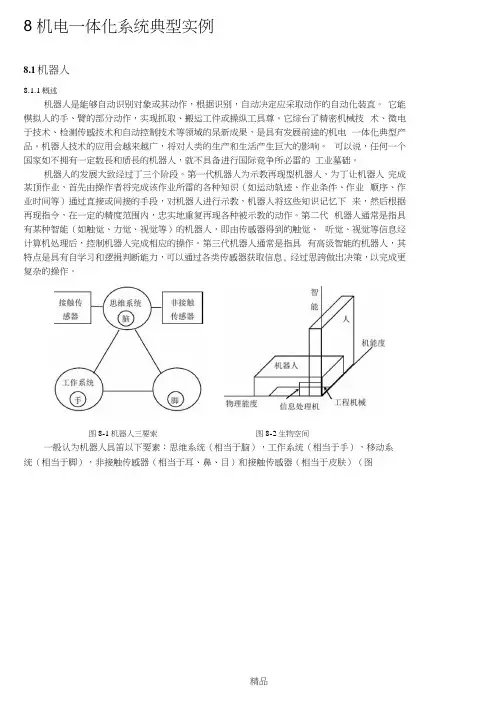
8 机电一体化系统典型实例8.1机器人8.1.1概述机器人是能够自动识别对象或其动作,根据识别,自动决定应采取动作的自动化装直。
它能模拟人的手、臂的部分动作,实现抓取、搬运工件或操纵工具尊。
它综台了精密机械技术、微电于技术、检测传感技术和自动控制技术等领域的杲新成果,是具有发展前途的机电一体化典型产品。
机器人技术的应用会越来越广,将对人类的生产和生活产生巨大的影响。
可以说,任何一个国家如不拥有一定数長和质長的机器人,就不具备进行国际竞争所必雷的工业墓础。
机器人的发展大致经过丁三个阶段。
第一代机器人为示教再现型机器人,为丁让机器人完成某顶作业,首先由操作者将完成该作业所雷的各种知识(如运动轨迹、作业条件、作业顺序、作业时间等)通过直接或间接的手段,对机器人进行示教,机器人将这些知识记忆下来,然后根据再现指令,在一定的精度范围内,忠实地重复再现各种被示教的动作。
第二代机器人通常是指具有某种智能(如触觉、力觉、视觉等)的机器人,即由传感器得到的触觉、听觉、视觉等信息经计算机处理后,控制机器人完成相应的操作。
第三代机器人通常是指具有高级智能的机器人,其特点是具有自学习和逻揖判断能力,可以通过各类传感器获取信息, 经过思誇做出决策,以完成更复杂的操作。
图8-1机器人三要索图8-2生物空间一般认为机器人具笛以下要素:思维系统(相当于脑),工作系统(相当于手),移动系统(相当于脚),非接触传感器(相当于耳、鼻、目)和接触传感器(相当于皮肤)(图8-Do如果对机器人的能力评价标淮与对生物能力的评价标准一样,即从智能、机能和物理能三个方面迸行评价,机器人能力与生物能力具有一宦的相似性。
图8-2是以智能度、机能度和物理能度三座标表示的“生物空间”,这里,机能度是指变通性或通用性以及空间占有性等;物理能度包括力、速度、连续运行能力、均一性、可靠性等;智能度则指感觉、知觉、记忆、运算逻辑、学习、鉴定、综合判断等。
把这些概括起来可以说,机器人是具有生物空间三座标的三元机械。
应用机电一体化的例子应用机电一体化的例子:1. 自动售货机:自动售货机是应用机电一体化的典型例子。
它通过感应器感知用户选择,采用电机驱动货物的下落和推送,同时通过传感器检测货物的库存情况,从而实现自动售卖商品的功能。
2. 机器人:机器人是机电一体化的典型应用。
机器人结合了机械设备、电子控制和人工智能技术,能够完成各种复杂的工作任务,如生产制造、装配、包装等。
机器人能够通过感应器感知环境变化,并通过电机驱动机械臂等部件实现各种动作。
3. 智能家居:智能家居是机电一体化的应用之一。
通过集成电机、传感器和控制系统,智能家居可以实现自动化控制,如自动调节室内温度、自动开关灯光、自动打开窗帘等,提高家居的舒适性和便利性。
4. 无人驾驶车辆:无人驾驶车辆是机电一体化的典型应用之一。
无人驾驶车辆通过激光雷达、摄像头等传感器感知周围环境,并通过电机驱动车辆的转向、加速、刹车等动作,实现自动驾驶的功能。
5. 机电一体化的医疗设备:机电一体化在医疗设备中得到广泛应用,如手术机器人、电子血压计、心电图仪等。
这些设备通过电机驱动机械臂、传感器感知患者的生理参数,并通过电子控制系统实现精确的医疗操作。
6. 机电一体化的自动化生产线:在工业生产中,机电一体化的自动化生产线可以实现高效、精确的生产过程。
通过电机驱动机械装置和传送带,自动化生产线可以实现产品的装配、检测、包装等工序,提高生产效率和质量。
7. 智能电动车:智能电动车是机电一体化的应用之一。
电动车通过电机驱动车辆的运动,并通过传感器感知车辆的状态和环境变化,通过电子控制系统实现智能充电、智能驾驶等功能。
8. 机电一体化的物流设备:在物流行业中,机电一体化的设备被广泛应用,如自动分拣机、自动堆垛机等。
这些设备通过电机驱动机械臂、传送带等部件,实现物品的分拣、搬运等任务,提高物流效率和准确性。
9. 机电一体化的航空航天设备:机电一体化在航空航天领域得到广泛应用,如飞机、火箭等。
简述机电一体化机械系统的组成机电一体化机械系统是指将机械传动与电气控制相结合,形成一个整体的系统。
这种系统能够实现机械运动的自动化、智能化,广泛应用于各个领域。
机电一体化机械系统的组成主要包括三个部分:机械部分、电气部分和控制部分。
下面将分别介绍这三个部分的具体内容。
1. 机械部分:机械部分是机电一体化机械系统的基础,它由各种机械元件组成,包括传动装置、传感器、执行机构等。
传动装置用于将电机的旋转运动转化为所需的线性或旋转运动,常见的传动装置有齿轮传动、皮带传动、链传动等。
传感器用于感知机械系统的状态和环境信息,如位置传感器、速度传感器、力传感器等。
执行机构用于根据控制信号进行相应的动作,如电动阀门、电动门禁等。
2. 电气部分:电气部分是机电一体化机械系统的核心,它主要由电气元件和电气设备组成。
电气元件包括电机、开关、保护器、接触器等,它们负责将电能转化为机械能,并进行各种电气控制。
电气设备包括电源、控制柜、仪表等,它们提供电能供应和电气控制所需的环境条件。
3. 控制部分:控制部分是机电一体化机械系统的大脑,它由控制器和控制算法组成。
控制器负责接收传感器反馈的信号,根据控制算法产生相应的控制信号,控制机械系统的运动。
控制算法是实现机电一体化机械系统自动化、智能化的关键,它可以根据实际需求进行编程,实现各种复杂的控制功能。
机电一体化机械系统的工作原理是:传感器感知机械系统的状态和环境信息,将其转化为电信号;控制器接收传感器反馈的信号,经过算法处理后产生相应的控制信号;电气部件根据控制信号进行动作,驱动机械部件实现相应的运动。
通过不断地反馈和控制,机电一体化机械系统能够实现自动化、智能化的运行。
机电一体化机械系统的应用非常广泛,例如在制造业中,可以应用于自动化生产线、机器人等领域;在交通运输领域,可以应用于自动驾驶车辆、交通信号控制等;在家居生活中,可以应用于智能家居、智能家电等。
机电一体化机械系统的发展将极大地提高生产效率,降低人力成本,改善生活质量。