盾构机姿态的人工测量原理
- 格式:pdf
- 大小:319.47 KB
- 文档页数:4
盾构机姿态人工测量方案由于ELS靶被送往德国进行例行的检修,大汉盾构区间右线暂时无法使用SLS-T 导向系统,为保证盾构日常掘进的需要,确保盾构机按设计轴线前进,拟采用人工测量的办法测量出盾构机当前的姿态,以指导盾构机的掘进。
以下对盾构机姿态的人工测量方案进行说明:§1原理盾构机在出厂时,开发SLS-T导向系统的VMT公司就根据盾构机的设计与加工尺寸,在盾构机中体的隔板上布置了12~16个测点,所有的测点都在出厂前详细测设了每一个测点与刀盘中心的相对位置。
盾构机姿态人工测量就是利用人工直接采用控制导线的测量办法详细测出这些测点中的部分点位的绝对坐标,然后根据测点与刀盘中心的空间关系,反算出刀盘中心坐标,最后根据设计线路参数与刀盘中心的绝对坐标的空间关系推算出盾构机的三维控制姿态。
§2适用范围2.1盾构机始发姿态测量盾构机始发姿态便是由人工测量出的盾构机姿态。
盾构机始发定位时需精确测定ELS靶相对于盾构机主机的相对位置关系,其方法便是根据人工测量出的盾构机姿态,在SLS-T导向系统的微机中调整ELS靶的位置参数,以改变微机上显示的盾构机姿态,当盾构机上显示的姿态与人工测量出的盾构机姿态一致时,便可认为当前ELS靶的位置参数是正确的,ELS靶始发定位调试顺利完成。
2.2对S L S-T导向系统的复核在掘进施工中,利用人工测量的办法测量出盾构机当前的姿态,与SLS-T导向系统显示的盾构机姿态进行比较,来复核导向系统的测量成果。
2.3盾构掘进施工测量利用人工测量出的盾构机姿态可指导盾构机的掘进施工,保证盾构机按设计轴线前进。
盾构掘进施工中,人工测量盾构机姿态的测量频率为每环1次。
§3实例以大汉盾构区间右线所用的S180盾构机为例,盾构机中体的隔板上布置了12个测点,这些测点与刀盘中心的相对位置如下表:3.1右线始发姿态测量在始发姿态测量时利用控制导线测出的测点绝对坐标见下表:根据这些测点与刀盘中心的位置关系,推算出刀盘中心的绝对坐标,然后根据刀盘中心绝对坐标和隧道设计中线的空间关系推算出盾构机始发姿态如下:刀盘(mm) 后体(mm) 趋势(mm/m) 里程(m)水平方向-12.7 43.4 12 15883.9569竖直方向31.7 31 0旋转:0.6mm/m 坡度:-1.9mm/m3.2当前盾构机姿态测量利用控制导线测出的当前测点的绝对坐标见下表:根据这些测点与刀盘中心的位置关系,推算出刀盘中心的绝对坐标,然后根据刀盘中心绝对坐标和隧道设计中线的空间关系推算出盾构机当前姿态如下:刀盘(mm) 后体(mm) 趋势(mm/m) 里程(m)水平方向27 26 0 15705.102竖直方向11 4 1旋转:-4 mm/m 坡度: 5 mm/m§4测量仪器与测量精度所用仪器为徕咔TCA1103全站仪采用此方法进行人工测量,测量精度可以达到如下标准:平面偏差±5mm;高程偏差±5mm;纵向坡度偏差1‰;盾构机旋转偏差1‰;盾构机刀盘里程偏差±10mm。
盾构机姿态人工测量计算方法论坛作者:李懂懂【摘要】本文针对地铁隧道盾构法施工中盾构机的姿态位置,提出盾构机姿态的人工测量原理,简明地介绍了地铁建设中盾构及姿态人工测量过程,并着重对盾构机姿态定位中的测量工作做了深入细致的研究,阐述了盾构机自动导向系统姿态定位测量的原理和方法,以及如何使用人工测量的方法来检核自动导向系统的准确性,分析了盾构机姿态定位检测的情况。
确保盾构机按照设计的线路进行掘进。
【关键词】城市地铁;盾构机姿态;人工测量原理1 、概述随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于±50mm),必须研究每一步盾构机姿态人工测量的方法。
2 、人工测量原理简介盾构机姿态的人工测量原理是利用安装在管片顶部小吊篮上采用强制归心的全站仪来测量盾构机上自设的三个人工标靶,通过专业的盾构掘进姿态解算程序来计算盾构机的掘进姿态,及时指导盾构机纠偏,确保盾构机按照设计的线路进行掘进。
3、盾构机姿态位置的检测方法和计算由于盾构机在隧道内推进过程中有各项因素都可能影响ENZAN系统的稳定性,这时候我们就需要通过其他方法来检测盾构机姿态是否在设计轴线内。
间隔时间取决于隧道的具体情况,在有严重的光折射效应的隧道中,每次检查之间的间隔时间应该比较短。
这主要是由于空气温度差别很大的效应。
论述折射及其效应的题目有大量的文献资料,此处不再详述。
在隧道测量时必须始终考虑这一效应。
低估这个问题可能会引起严重的困难,尤其在长隧道中。
我们采用在盾构机上焊接钢筋头来对盾构机的姿态进行检查,在盾构机1、2、3号棱镜边焊接一根5cm左右长度的钢筋头,并在钢筋头上凿好十字丝,在盾构始发前应多次测设钢筋头与盾构机三维轴线坐标,他们相对于盾构机的轴线有固定的参数关系,即它们与盾构机的轴线构成局部坐标系。
测量时只需测出三个钢筋头位置,通过始发前建立的局部坐标系,就可以计算出盾构机的姿态与位置参数与ENZAN系统上显示的实时姿态的差别,推断实时姿态是否准确。
盾构姿态人工测量方法盾构姿态的人工测量方法是指通过人工手段对盾构机械的姿态进行测量和调整。
盾构机械是隧道掘进工程中的主要设备,准确的姿态调整对于确保工程质量和安全至关重要。
本文将介绍盾构姿态的常用人工测量方法,包括螺旋仪法、测距法和传感器法。
1.螺旋仪法螺旋仪法是最为常用的盾构姿态测量方法之一、该方法基于螺旋测量原理,通过螺旋仪仪器的安装和使用,能够准确测量盾构机械在隧道断面的平面位置和高程位置。
螺旋仪法需要在盾构机械上安装螺旋仪仪器,并对仪器进行校准和调整,以确保测量结果的准确性。
在工程施工过程中,通过定期测量和校正,可以实时监测盾构机械的姿态,及时调整和纠正。
2.测距法测距法是另一种常用的盾构姿态测量方法。
该方法通过测量盾构机械前后端的距离差异,来判断其姿态的平衡情况。
测距法需要在盾构机械的前后部分安装测距仪,测距仪能够准确测量前后端的距离,并将数据传输给中央控制系统进行判断和处理。
通过不断的测量和调整,可以实现盾构机械的姿态平衡和减小误差。
3.传感器法传感器法是较为先进和精确的盾构姿态测量方法。
该方法通过在盾构机械上安装多个传感器,以实时感知盾构机械的运动姿态。
这些传感器包括加速度计、陀螺仪、倾角传感器等,能够测量盾构机械的加速度、角速度和倾角等数据。
传感器法通过将这些数据传输给中央控制系统,并与预设值进行比对和分析,从而判断盾构机械的姿态情况。
传感器法具有高效、精确和可靠的特点,尤其适用于复杂工程环境和高精度要求的盾构施工。
在盾构姿态人工测量方法的选择和应用中,需要综合考虑实际工程要求、测量精度和施工效率等因素。
不同的方法有不同的特点和适用范围,工程师需要根据实际情况进行选择和调整。
此外,为了保证测量结果的准确性和可靠性,还需要定期对测量设备进行校准和维护,并采取适当的措施对环境因素进行补偿和校正。
通过科学有效的测量方法,可以实现盾构机械的准确姿态控制,提高施工质量和安全性。
盾构施工人工测量与自动测量的方法分析摘要:盾构施工中的掘进方向控制和高程控制直接决定了工程项目的质量、成本以及安全性,因此就需要在盾构施工中要采用可靠的技术测量这些关键的参数。
目前主要利用自动测量方法监控盾构机的实时姿态和掘进方向,同时利用人工方式加以检验,提高测量的可靠性。
研究以上两种测量路径的基本实现原理,并分析了其具体应用场景。
关键词:盾构施工;人工测量;自动测量;方法引言:在盾构施工中,自动测量方法可实时显示测量结果,实现全程监控,人工测量在效率上有所欠缺,通常只能在施工暂停的间隙开展人工测量,但这两种测量方式在盾构掘进控制中都是不可缺少的技术,二者要实现相互配合,全面提高盾构测量的可靠性和准确性,对这两种测量方式开展研究具有重要的工程指导意义。
1.测量在盾构施工中的重要性盾构机在地铁、高铁以及其他地下工程的施工中发挥着非常关键的作用。
以最常见的地铁施工为例,盾构机呈现出掘进效率高、安全风险可控、环境扰动小等一系列技术优势。
但地下掘进施工的关键是控制好方向,地铁线路要按照设计图纸经过多个站点,相邻站点之间尽可能保持直线,这样可减少路线整体长度、降低车站和线路的建造成本以及提高工程效率。
盾构机械在地下空间作业,方向测量是非常关键的一道工序,并且伴随着整个掘进过程。
一旦放线测量失误,整体的掘进线路就会发生偏移,盾构机械的瞬时位置是测量过程中的关键因素,测量的基本原理是在盾构机的特定位置设置专门的检测参考点,然后使用专业化的工具测量其位置变化,借此来实现盾构方向的全程控制[1]。
1.盾构施工测量方法分类(一)盾构施工人工测量方法第一,标尺测量。
这种测量工具可用于检测盾构机的管片是否存在偏差的问题。
在盾构机内部设置有专门的参考坐标,其位置位于盾尾内壳的铝合金尺上,利用水平标尺测量贴在其表面的三维坐标,获得数据之后,根据测量点与盾构机头部和尾部的距离关系,即可计算出其当前是否存在首尾方向上的偏差,这种方法在弯曲度较大的盾构作业中难以发挥作用,更加适用于直线段的测量,但整体精度偏低。
盾构测量知识点总结盾构是一种在地下挖掘隧道的机械设备,广泛应用于城市地铁、地下管线等工程中。
盾构测量是盾构施工中不可或缺的一个环节,它负责确定隧道的位置、方向和姿态,确保盾构在地下进行准确、安全的施工。
在盾构测量中涉及到很多基本概念、原理和技术,下面就盾构测量的知识点进行总结分析。
一、盾构测量基本概念1. 盾构测量的定义盾构测量是指利用测量技术手段对盾构进行控制和监测。
它是盾构施工中的重要环节,主要包括盾构的导向、水平、垂直和姿态控制。
盾构测量的目的是确保盾构在地下进行准确、安全的施工。
2. 盾构测量的作用盾构测量的作用主要包括以下几方面:(1)确定盾构的位置、方向和姿态。
(2)监测盾构的变形、位移和姿态变化。
(3)调整和控制盾构的导向、水平和垂直度。
(4)确保盾构在地下进行准确、安全的施工。
3. 盾构测量的方法盾构测量主要包括以下几种方法:(1)导向测量:用于确定盾构的位置和方向。
(2)水平测量:用于控制盾构的水平度。
(3)垂直测量:用于控制盾构的垂直度。
(4)姿态测量:用于控制盾构的姿态。
二、盾构测量原理1. 盾构测量的基本原理盾构测量的基本原理是利用测量仪器和设备对盾构进行控制和监测。
它主要包括以下几个方面的原理:(1)测量原理:利用测距仪、角度仪等测量仪器对盾构进行定位和测量。
(2)控制原理:利用控制系统对盾构的位置、方向和姿态进行调整和控制。
(3)监测原理:利用监测系统对盾构的变形、位移和姿态变化进行监测和分析。
2. 盾构测量的误差分析盾构测量中存在着不可避免的误差,主要包括以下几种误差:(1)仪器误差:由于测量仪器本身的精度和稳定性导致的误差。
(2)环境误差:由于地下环境、地质条件等因素导致的误差。
(3)操作误差:由于人为操作不当导致的误差。
(4)系统误差:由于盾构控制系统本身的误差导致的误差。
盾构测量的误差分析对于准确测量和控制盾构非常重要,需要采取相应措施来减小误差并提高测量精度。
盾构姿态人工测量方法盾构机是一种用于地下隧道建设的工程机械设备。
在盾构机施工过程中,准确测量盾构机的姿态对于确保隧道建设质量和安全至关重要。
本文将介绍几种常见的盾构姿态人工测量方法。
1.简单水平仪法简单水平仪法是一种简单直观的盾构姿态测量方法。
测量时,将水平仪固定在盾构机上,通过观察水平仪中的气泡来判断盾构机是否水平。
然而,这种方法只适用于检测盾构机是否水平,无法测量盾构机的倾斜角度。
2.三角仪法三角仪法是一种基于图形几何原理的盾构姿态测量方法。
测量时,可以借助三角板、直角镜等工具,通过观察盾构机与参考平面之间的角度来进行测量。
该方法需要使用角度计算公式进行计算,相对比较繁琐,且对测量人员的眼力要求较高。
3.激光测距法激光测距法是一种利用激光器测量距离的盾构姿态测量方法。
该方法借助激光测距仪,将激光束与参考平面进行垂直对准,利用激光器显示的距离值来测量盾构机与参考平面之间的倾斜角度。
该方法操作简便,测量准确可靠。
4.加速度计法加速度计法是一种利用加速度计测量盾构姿态的方法。
加速度计是一种能够测量物体加速度的装置,通过捕捉盾构机的加速度来推导出盾构机的姿态。
该方法常用于现代盾构机中,精度较高,但需要精确的传感器和数据处理系统。
5.摄像测量法摄像测量法是一种利用摄像机进行远程测量的方法。
在盾构机上安装摄像机,通过对拍摄的图像进行处理,可以获取盾构机姿态信息。
该方法无需人工干预,操作简单,但对于图像处理技术要求较高。
综上所述,盾构姿态人工测量方法有简单水平仪法、三角仪法、激光测距法、加速度计法和摄像测量法等。
在实际应用中,可以根据具体情况选择适合的测量方法,以确保盾构机施工的质量和安全。
盾构施工人工测量与自动测量的原理与方法发表时间:2020-12-10T11:27:27.947Z 来源:《基层建设》2020年第23期作者:李健健[导读] 摘要:随着我国城市化步伐的加快,盾构施工技术在穿越复杂地质施工方面具有极高的安全性和高效性,因此被广泛应用于地铁建设中。
甘肃省庆阳市镇原人 744500摘要:随着我国城市化步伐的加快,盾构施工技术在穿越复杂地质施工方面具有极高的安全性和高效性,因此被广泛应用于地铁建设中。
其具体采用的施工工艺与传统的暗挖隧道施工工艺存在明显区别,在实际测量中,相对于传统的测量方法,存在密切相关性的同时,也有很多明显的区别之处。
基于此,本文对盾构施工人工测量与自动测量的原理与方法进行分析。
关键词:盾构施工;人工测量;自动测量;方法 1盾构施工技术解析盾构法是暗挖法施工中的一种全机械化施工方法。
它是将盾构机械在地中推进,通过盾构外壳和管片支承四周围岩防止发生往隧道内的坍塌。
同时在开挖面前方用切削装置进行土体开挖,通过出土机械运出洞外,靠千斤顶在后部加压顶进,并拼装预制混凝土管片,形成隧道结构的一种机械化施工方法。
地铁隧道盾构施工技术国内最早应用于1996年广州地铁建设,在此项目中运用盾构施工技术不仅有效的提高了隧道施工的速度,节约了大量人工,更重要的是为地铁隧道在复杂的城市地质环境中提供了有力的安全保障。
自此之后盾构施工技术便广泛应用于各大城市地铁隧道的建设之中。
2盾构机测量方法 2.1标尺法标尺法是常见的人工测量方法之一,能够对环片偏差进行测量。
其基本原理如下:水平摆放在盾构机中的标尺的中心位置有一坐标,施工人员首先需要测量这个坐标,并在此基础上利用几何关系进行前后胴体中心坐标的推算。
推算完成后,施工人员将推算结果与隧道设计轴线进行比较,最终得到两者之间存在的偏差。
2.2三点法三点法进行测量的主要步骤为以下几个阶段:组装盾构机阶段,施工人员进行螺母的焊接工作。
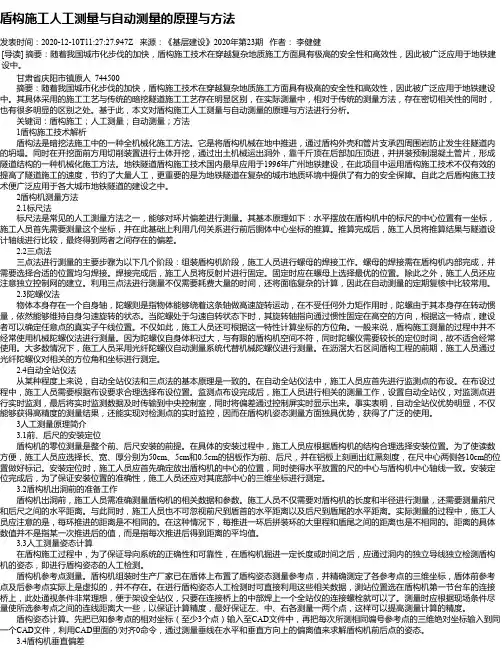
地铁盾构施工测量技术在进行盾构机组装时,VMT公司的测量工程师就已经在盾体上布置了盾构姿态测量的参考点(共21个),如图9。
并精准测定了各参考点在TBM坐标系中的三维坐标。
咱们在进行盾构姿态的人工检测时,能够直接利用VMT公司提供的相关数据来进行计算。
其中盾体前参考点及后参考点是虚拟的,实际是不存在的):图9 S267盾构机参考点的布置盾构姿态人工检测的测站位置选在盾构机第一节台车的连接桥上,此处通视条件超级理想,而且专门好架设全站仪。
只要在连接桥上的中部焊上一个全站仪的连接螺栓就能够够了。
测量时,应依照现场条件尽可能使所选参考点之间连线距离大一些,以保证计算时的精度,最好保证左、中、右各测量一两个点,如此就能够够提高测量计算的精度。
例如在咱们在选择S267盾构机的参考点时,即是选择的一、10、21三点作为盾构姿态人工检测的参考点。
盾构姿态的计算盾构姿态的计算原理盾构机作为一个近似的圆柱体,在开挖掘进进程中咱们不能直接测量其刀盘的中心坐标,只能用间接法来推算出刀盘中心的坐标。
图10盾构姿态计算原理图如图A 点是盾构机刀盘中心,E 是盾构机中体断面的中心点,即AE 连线为盾构机的中心轴线,由A 、B 、C 、D 、四点组成一个四面体,测量出B 、C 、D 三个角点的三维坐标(x i ,y i , z i ),依照三个点的三维坐标(x i , y i , z i )别离计算出L AB , L AC , L AD , L BC , L BD ,L CD , 四面体中的六条边长,作为以后计算的初始值,在盾构机掘进进程中L i 是不变的常量,通过对B 、C 、D 三点的三维坐标测量来计算出A点的三维坐标。
同理,B 、C 、D 、E 四点也组成一个四面体,相应地求得E 点的三维坐标。
由A 、E 两点的三维坐标就能够计算出盾构机刀盘中心的水平偏航,垂直偏航,由B 、C 、D 三点的三维坐标就能够确信盾构机的仰俯角和转动角,从而达到检测盾构机姿态的目的。
People who often blame themselves can often get forgiveness from others.勤学乐施天天向上(页眉可删)关于盾构机实时姿态测量和计算方法的研究随着社会经济的发展和城市建设的加快,城市规模不断扩大,人口不断增多,交通越来越来拥挤。
一些地方的城市建设者为了治理交通拥堵,分散交通压力。
不断寻求解决方式,修建地铁成为了一些城市建设者的主要的选择方式。
但是在修建地铁的过程中,工程量非常大,施工难度相对较高。
在地铁施工过程中,采用盾构技术,与传统的施工技术相比,有着许多优势,逐渐成为地铁修建过程中的主要施工方法。
本文将主要分析盾构姿态的测量的原理和方法,探究盾构姿态的测量的精度分析。
盾构机姿态简介盾构施工过程就像生活中的目标运动,先进行重心平移,然后在运动的过程中偏航,最后进行自身重心的滚动。
因此,在盾构施工过程中,需要监测的数据是盾构机位置和姿态的参数。
主要是三维坐标和滚动角、偏航角和俯仰角。
盾构机姿态的控制对整个工程施工意义重大,它决定着施工的质量和隧道推进方向的精度。
一旦控制不好,容易导致隧道偏差过大和盾尾间隙过小而相碰。
盾构机液压系统液压系统是盾构机的核心部分,盾构机的工作机构主要是由液压系统驱动完成,对盾构机系统的运行起着很大的作用。
盾构机的液压系统主要包括两大系统,一是推进系统,二是主动铰接系统。
2.1.推进系统盾构机的主要工作系统是推进系统,它主要是通过油缸作用于成型观片,以此来实现盾构前进。
推进系统的动力单元是一台80L/min旋转柱塞泵,执行元件是24个油缸,调节和控制部分包括方向的控制、油缸电磁阀的选择、安全阀、节流阀等。
盾构机工作时的最大工作压力是35MPa,液压泵最大推进流量是80L/min,推进油缸是240/180-1950(mm)。
2.1.1.推力计算盾构机共有推进油缸24个,总推力是这24个油缸的推力之和,那么在液压系统的最大推力F最大-24×P×Sn中,P表示油缸的最大压强,S表示活塞面积,因此,F最大-24×35×106Pa ×3.14×0.122㎡≈37981t2.1.2.推进速度计算盾构机的最大推进速度就是油缸的最大伸长速度,S-1/T,T-V/S1,在这个公式中,S表示最大推进速度,T表示伸长1mm所需要的时间,V表示伸长1mm需要的油液体积,S1为推进流量,S为74mm/min。
地铁盾构施工测量地铁盾构施工测量作者:何德汉地铁盾构施工测量总结一、概述盾构法是隧道施工采用的一项综合性施工技术,它是将隧道的定向掘进、运输、衬砌、安装等各种工种组合成一体的施工方法。
其工作深度可以很深,不受地面建筑和交通的影响,机械化和自动化程度很高,是一种先进的土层隧道施工方法,广泛用于城市地下铁道,越江隧道等工程的施工中。
盾构施工测量主要是控制盾构的位置和推进方向。
利用洞内导线点测定盾构的位置,用激光全站仪或者激光定向仪指示推进方向,用千斤顶编组施以不同的推力,进行纠偏,即调整盾构的位置和推进方向。
二、盾构施工测量准备工作施工图审核、测量定位依据点的交接与检测、测量方案的编制与数据准备、测量仪器和工具的检验校正、施工场地测量、盾构施工线路建(构)筑物调查。
三、地面控制网测量盾构施工地面控制网测量应根据业主提供的测量定位依据点进行,并且在隧道开挖以前完成。
它主要包括平面控制测量和高程控制测量,主要任务是测定地面各洞口控制点的平面位置和高程,作为向地下洞内引测坐标、方向及高程的依据,并使地面和地下在同一控制系统内,从而保证隧道的准确贯通。
平面控制网一般布设为独立网形式,根据隧道长度、地形及现场和精度要求,采用不同的布设方法,例如三角锁(网)法,边角法、精密导线法以及GPS定位技术等,而高程控制网一般采用水准测量、三角高程测量等。
1、地面导线测量在隧道施工中,地面导线测量可以作为独立的地面控制,也可以用以进行三角网的加密,将三角点的坐标传递到隧道的入口处。
1.1、导线点的布设。
1.1.1、精密导线点的外置应选在因施工变形影响范围以外的地方,点位应避开地下建筑物、车站、地下管线等。
楼顶上的导线点宜选在靠近并能俯视线路、车站、车辆段一侧稳固的建筑上。
1.1.2、精密导线应沿线路方向布设,并应采用附合导线、闭合导线或多个结点的导线网的形式。
1.1.3、相邻标段衔接处需要设有至少两个共用点,并确保满足附合导线的边长数少于12个,相邻边的短边不宜小于边长的1/2,且短边边长不宜短于100m的要求。
盾构机姿态参数测量技术研究摘要:根据三点决定一个平面的原理,通过在盾构机中体上布置测量控制点,对其三维坐标进行测量:根据空间解析几何原理,推导出盾构机刀盘中心三维坐标以及俯仰角、横摆角、扭转角的计算方法。
文章利用计算机的伪随机函数对盾构机姿态参数的测量精度进行了模拟评价,探讨了提高测量精度的方法。
结果表明,盾构姿态参数的测量误差均服从正态分析:采用精度为3 mm的激光经纬仪测量控制点坐标,得到的盾构姿态参数的误差范围比规范要求小得多。
关键词:盾构姿态;测量;误差分析The research of the measurement technology aboutthe shield posture parametersAbstract:According to the basic principle that three points decide a plane, we can lay control points to measure their three-dimensional coordinates on a shield. Based on the principles of analytical geometry, the method was derived to compute the coordinates of the center in the cutting disc, pitch angle, lateral swing angle and torsion angle. The paper carried out a simulated evaluation to measure the precision of the shield posture parameters by using the pseudorandom function with the computer, and discussed the ap-proaches to promote the precision. The result was shown that the measurement errors of the shield posture parameters followed the normal distribution. The error band of the shield posture parameters, which was obtained by measuring the coordinate of controlling points with a 3 mm precision laser transit, was far less than that recommended by the specifications.Keywords : shield; posture ; measurement; error analysis盾构法隧道施工具有速度快、安全性高、质量好、对周围环境影响小等优点,已越来越多地在城市地铁隧道施工中得到应用。
盾构姿态测量方法
激光测距法是一种常用的盾构姿态测量方法。
它通过使用激光器发射
一束激光光束,然后利用接收器接收反射回来的激光光束,通过计算激光
光束的时间和方向,可以确定盾构机的朝向和倾角。
地磁测量法是另一种常用的盾构姿态测量方法。
地磁测量法利用地球
的磁场来确定盾构机的朝向和倾角。
通过在盾构机上安装磁力计和倾角传
感器,可以测量地磁场的变化,从而计算盾构机的姿态。
全站仪测量法是一种比较精确的盾构姿态测量方法。
它利用全站仪测
量盾构机上的控制点,然后通过计算控制点的坐标变化,可以确定盾构机
的姿态。
全站仪测量法需要在盾构机施工前和施工中多次进行测量,以获
得准确的姿态数据。
水平仪测量法是一种简单直观的盾构姿态测量方法。
它利用水平仪的
气泡来测量盾构机的水平度和倾斜度。
水平仪测量法可以快速测量盾构机
的姿态,但精度相对较低。
除了以上几种盾构姿态测量方法,还可以结合其他传感器和测量设备
来进行姿态测量。
例如,可以在盾构机上安装加速度计、陀螺仪等传感器,通过测量加速度和角速度的变化来确定盾构机的姿态。
在实际应用中,通常会结合多种姿态测量方法来进行盾构姿态测量,
以提高测量的准确性和可靠性。
同时,还需要根据具体情况对测量数据进
行处理和分析,以得出有关盾构机姿态的相关参数和结论。
总结起来,盾构姿态测量方法包括激光测距法、地磁测量法、全站仪
测量法、水平仪测量法等多种方法。
这些方法的选择取决于实际情况和需求,可以结合使用来提高测量的准确性和可靠性。
3)盾构机姿态初始测量盾构机姿态初始测量包括测量水平偏航、俯仰度、扭转度。
盾构机的水平偏航、俯仰度是用来判断盾构机在以后掘进过程中是否在隧道设计中线上前进,扭转度是用来判断盾构机是否在容许范围内发生扭转。
盾构机姿态测量原理。
盾构机作为一个近似圆柱的三维体,在开始隧道掘进后我们是不能直接测量其刀盘的中心坐标的,只能用间接法来推算。
在盾构机壳体内适当位置上选择观测点就成为必要,这些点既要有利于观测,又有利于保护,并且相互间距离不能变化。
在图6中,O点是盾构机刀盘中心点,A点和B点是在盾构机前体与中体交接处,螺旋机根部下面的2个选点。
C点和D点是螺旋机中段靠下侧的2个点,E点是盾构机中体前断面的中心坐标,A、B、C、D4点上都贴有测量反射镜片。
由A、B、C、D、O5点所构成的2个四面体中,测量出每个角点的三维坐标(xi,yi,zi)后,把每个四面体的4个点之间的相对位置关系和6条边的长度L计算出来,作为以后计算的初始值,在以后的掘进过程中,Li将是不变的常量(假设盾构机掘进过程中前体不发生太大形变),通过测量A、B、C、D4点的三维坐标,用(x,y,z)、L就能计算出O点的三维坐标。
用同样的原理,A、B、C、D、E5点也可以构成2个四面体,相应地E点的三维坐标也可以求得。
由E、O 2点的三维坐标和盾构机的绞折角就能计算出盾构机刀盘中心的水平偏航、垂直偏航,由A、B、C、D4点的三维坐标就能确定盾构机的扭转角度,从而达到了检测盾构机的目的。
(4)SLS-T导向系统初始测量SLS-T导向系统初始测量包括:隧道设计中线坐标计算,TCA(智能型全站仪)托架和后视托架的三维坐标的测量,VMT初始参数设置和掘进等工作。
①隧道设计中线坐标计算:将隧道的所有平面曲线要素和高程曲线要素输入VMT软件,VMT将会自动计算出每间隔1m里程的隧道中线的三维坐标。
隧道中线坐标需经过其他办法多次复核无误后方可使用。
②TCA托架和后视托架的三维坐标的测量:TCA托架上安放全站仪,后视托架上安放后视棱镜。
盾构施工人工测量与自动测量的原理与方法沈阳(中铁二十二局集团轨道工程有限公司,北京100040)【摘要】盾构施工既可以采用人工测量,又可以采用自动测量。
本文对实际的工程数据进行仔细研究,在数据分析的基础上对不同测量方法的精度、可操作性等指标进行比较和分析。
研究结果表明:人工测量的作用之一就是对自动测量的准确性进行检验和校准。
在测量精度有保证的前提下,人工测量和自动测量各有侧重,前者侧重对测量部分的控制,后者侧重对施工进行测量。
在实际的操作过程中,应将两者有机结合到一起,优势互补,促进盾构隧道的贯通。
【关键词】盾构施工;人工测量;自动测量;测量方法【中图分类号】U455.43【文献标识码】A【文章编号】2095-2066(2020)03-0167-021盾构机施工测量在实际操作的过程中,为避免隧道整体受到盾构机轴线与设计轴线偏差的影响,施工人员应尽量控制盾构机的姿态,保证盾构机的掘进方向与设计轴线在一条直线上,不发生偏移现象。
隧道的瞬时位置是目前盾构姿态测量的最主要目标,测量后施工人员还应确认盾构机的瞬时位置,使盾构机的瞬时位置满足设计和规范的要求。
施工人员应采用科学的工具和方法对盾构机掘进时的瞬时位置进行确认,保证位置的准确性。
首先,测量采用的主要工具是全站仪和其他辅助工具。
其次,施工人员应在盾构机上合理设置标志点。
标志点的设置应根据盾构机的特点合理进行设置。
最后,标志点设置完成后,施工人员对盾构机掘进时的瞬时位置进行准确判定,判定采用的方法主要是几何计算法。
盾构姿态测量既包括姿态角的测量,又包括空间位子的测量。
2盾构机测量方法2.1标尺法标尺法是常见的人工测量方法之一,能够对环片偏差进行测量。
其基本原理如下:水平摆放在盾构机中的标尺的中心位置有一坐标,施工人员首先需要测量这个坐标,并在此基础上利用几何关系进行前后胴体中心坐标的推算。
推算完成后,施工人员将推算结果与隧道设计轴线进行比较,最终得到两者之间存在的偏差。