2010中国机器人大赛暨RoboCup中国公开赛中型组规则(3.0版)
- 格式:pdf
- 大小:702.90 KB
- 文档页数:69
“南海大沥创新杯”亚洲机器人锦标赛中国区选拔赛VEX机器人工程挑战赛比赛规则第1节 简介概述本节介绍VEX机器人工程挑战赛和“集结号”的比赛规则。
VEX机器人工程挑战赛当今全球性的经济危机突显对更多创造者和生产者的需求。
显然,我们需要今天的学生成为明天的科学家、工程师和解决问题的领导人。
在化学、医药、材料和物理方面近年来的突破显露出一系列新的挑战和创造了用技术来解决问题的更多机会。
这些问题不是学术性的,问题的解决有助于拯救世界,而那些解决技术问题的人会成为拯救世界的人。
这凸显了我们面临的戏剧性挑战:高中毕业生选修理工专业的不够多。
这并不是技术院校难以容纳新生,而是缺少感兴趣和合格的申请入学者。
简言之,除非直面问题,我们可能无法满足在下一代人里找到能解决问题的人的需求。
谁会来解决下一次世界性的危机?有感于这一问题,许多机构都在筹划新项目以吸引和鼓励青少年学习科学和技术。
很多人认为机器人是一个能吸引和保持今天年轻人注意力的强大平台。
在这个竞争激烈的时代,机器人有浓厚的魅力,它反映出应用物理、数学、计算机编程、数字样机和设计、综合解决问题、团队和思维领导能力的完美风暴。
在学校、志愿组织、公司和政府的努力下,学生对科学、技术、工程和数学的潜能会被激发出来,帮助他们发现自己的价值。
领军教育和竞赛机器人产品的美国IFI公司设计的VEX机器人,是下一代教育和竞赛的机器人产品,VEX机器人竞赛是优秀的教育机器人比赛。
虽然目前世界上现有许多机器人比赛,但是VEX机器人用户群体表现出对举办和参与新挑战比赛的方便性和经济性的强烈需求。
IFI公司深切希望,通过满足所有VEX机器人用户的需求来吸引、培育和养成能解决明天问题的候选工程师。
IFI公司的VEX机器人设计系统是为培养在机器人学和科学、技术、工程和数学教育知识的创造性而设计的课堂机器人平台的杰出代表。
VEX机器人给教师和学生提供了一个适于课堂和赛场使用,并且能负担得起的,扎实耐用的前沿机器人系统。

2010年安徽省第二届机器人大赛竞赛规则2010年安徽省第二届机器人比赛决定举办以下类别的比赛:(1)仿真2D比赛(2)仿真3D比赛(3)仿人机器人舞蹈比赛(4)机器人救援仿真比赛(5)MSRS Nao仿真比赛(6)家用机器人仿真比赛(命令语言)(7)家用机器人仿真比赛(自然语言)竞赛设立组委会和技术委员会,其中组委会负责竞赛比赛的报名及比赛进程的组织及比赛队伍后勤的维持,而技术委员会协助组委会完成赛程的编排、规则的制定、奖项的设置和比赛过程技术问题的仲裁。
技术委员会由以下人员担任,由王浩教授担任主席,张润梅教授担任副主席。
王浩安徽省高校计算机教育研究会大学生竞赛委员会主任,合肥工业大学计算机与信息学院副院长、教授张润梅(安徽建筑工业学院)方宝富(合肥工业大学)杨为明(安徽大学)张学锋(安徽工业大学)2010年安徽省第二届机器人足球比赛竞赛规则由六个部分构成,主要参考全国赛的规则,并结合安徽省的具体情况(每个学校可以有2支代表队)而制定。
其中第一部分为仿真2D比赛规则。
第二部分为仿真3D比赛规则。
第三部分为仿人机器人舞蹈比赛规则。
第四部分为机器人救援仿真比赛规则。
第五部分为MSRS Nao仿真比赛规则。
第六部分为家用机器人仿真比赛(命令语言、自然语言)规则。
第一章仿真2D比赛规则(11 VS. 11)1.1仿真比赛服务器版本SoccerServer 的版本为rcssserver-13.2.2;1.2机器配置每组比赛提供5台机器,其中1台为Server,另外4台平均分配给参赛双方。
必须使用LINUX操作系统,除了用于测试的机器,每个队不允许利用比赛机器采用非常规手段窃取别人的程序;操作系统版本:ubuntu10.04;1.3规则1.3.1报名规则每个学校可以选报至多2支球队,每支球队可以有1-3名学生队员,并确认队伍排序,如:1队,2队。
其中1队优先级高于2队。
在一个学校有多支球队进入8强,将以该优先级确定一个最高优先级的球队代表该校参加下一阶段的比赛,其余球队被淘汰成16强,其它学校相应替补。

机器人大赛比赛规则机器人大赛比赛规则一.比赛主题“夺宝奇兵”。
每个人心中都有梦想,梦想对于每个人都是无价之宝,但是真正去实现自己的梦想,必须去靠我们的智慧和勇气去努力拼搏。
过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,面对挑战的勇气,我们并定会找到属于我们的宝物,实现自己的人生梦想。
让我们用我们制作的机器人去帮助我们夺取宝物,实现我们人生中的科技梦想。
本次比赛的主题为“夺宝奇兵”。
机器人的任务就是经过艰难险阻夺取宝物。
过程中机器人需穿过复杂地形,途中读取条形码,根据提取到的关键信息判定藏有机关的密室,通过寻磁方式找到机关控制器,关闭机关,然后从多个物体中识别出宝物密钥,将密钥推到开关区,最后抵达宝物密室,触发开关,表示成功夺取宝物。
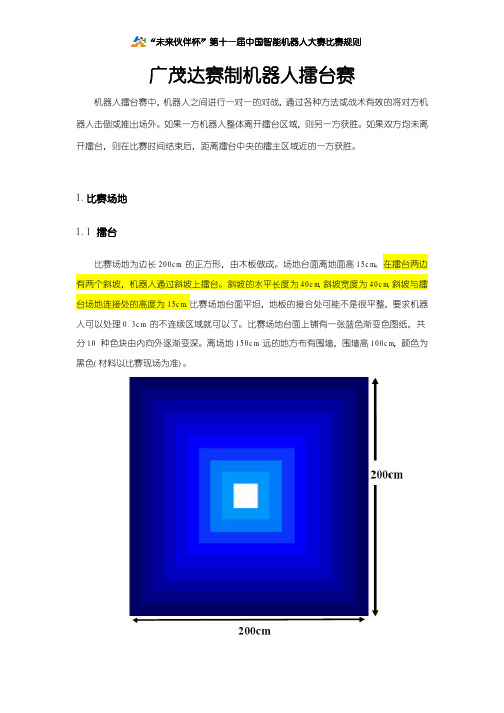
二.场地说明参考场地如下图:1.比赛场地:长600cm,宽300cm,场地四周围有高5cm的挡板。
地板基本平整,场地左右两边镜像对称,表面材料为:白色免漆板。
场地中铺有黑色引导线,宽度为5cm。
一些地方设有交叉线标记位置,宽度5cm,长20cm。
2.启动区(图中标号[1]区)分红、蓝两区,分别由红线和蓝线圈定,双方机器人各占一个启动区,具体颜色由开赛前抽签决定。
机器人需在启动区识别场上开赛声音信号(一定频率的声音信号,持续一段时间后停止,声音开关由裁判长控制),自动开始比赛。
3.跷跷板(图中标号[2]区)面积:160cm×50cm,高度:30cm跷跷板中间有黑色引导线,板两端与地面平滑衔接,在跷跷板前10cm处有交叉线提示位置。
跷跷板中间有交叉线提示位置,交叉线长度同跷跷板宽度。
机器人需在跷跷板上停留一段时间,在20秒内使跷跷板两端同时离开地面的时间尽可能长,期间可多次通过跷跷板,取最长停留时间。
若最长停留时间不足20秒则比赛结束时在总完成时间上累加缺少时间的4倍。
4.解码区(图中标号[3]区)在黑色引导线两侧分别有一段总长度25cm、宽度10cm和总长度25cm、宽度20cm的条形码(后者为两个场地共用),距离引导线10cm。
RoboCup中型组机器人比赛规则(MSLR)陈卫东叶道年张小冰等编译上海交通大学自动化研究所目录第一章RoboCup比赛项目 (3)1.1国际规则项目 (3)1.22Vs2项目 (3)第二章RoboCup国际规则 (4)●规则1 -比赛场地要求 (4)——规则1.1 尺寸 (4)——规则1.2 场地标识 (5)——规则1.3 球门区 (5)——规则1.4 罚球区 (5)——规则1.5 旗杆 (6)——规则1.6 角弧 (6)——规则1.7 球门 (6)——规则1.8 安全 (7)●规则2 -比赛所用球 (8)——规则2.1 质量和尺寸 (8)——规则2.2 受损球的替换 (8)●规则3 -比赛队员装备 (9)——规则3.1 安全性 (9)——规则3.2 基本装备 (9)——规则3.3 守门员 (11)——规则3.4 犯规和制裁 (11)——规则3.5 重新比赛 (11)●规则4 -裁判及助理裁判 (12)——规则4.1 裁判之权威 (12)——规则4.2 权力与职责 (12)——规则4.3 助理裁判 (12)——规则4.4 裁判判决 (12)●规则5 -比赛时间 (13)——规则5.1 半场 (13)——规则5.1 中场休息 (13)——规则5.2 补时 (13)——规则5.3 罚球 (13)——规则5.3 加时 (13)——规则5.4 中途终止之比赛 (13)●规则6 -比赛开始与重新开始 (14)——规则6.1 开球 (14)——规则6.2 开球过程 (14)——规则6.3 开球的犯规及措施 (14)●规则7 -比赛的进行与暂停 (15)——规则7.1球赛暂停 (15)——规则7.2 球赛进行 (15)●规则8 -比赛的计分 (16)——规则8.1 进球得分 (16)——规则8.2 比赛胜利 (16)——规则8.3 竞赛规则 (16)●规则9 -犯规行为 (17)——规则9.1 停球与持球 (17)——规则9.2 踢球与运球 (17)——规则9.3 犯规及其犯规后的处罚 (18)●规则10 -任意球与罚球点及点球 (20)——规则 10.1 任意球 (20)——规则10.2 任意球的位置 (20)——规则10.3 任意球犯规/制裁 (20)——规则10.4 罚球 (21)——规则10.5 球出边界的处理 (22)——规则10.6 球门发球 (22)●规则11- 上场队员的人数 (23)第三章RoboCup 2Vs2项目规则 (24)3.1 2Vs2比赛基本规则 (24)3.2 2Vs2比赛其它规则 (24)第一章RoboCup比赛项目RoboCup的原意为机器人世界杯(Robot World Cup)。
RoboCup中型组历届成绩表目录一、RoboCup世界杯中型组比赛成绩(一)2009年比赛成绩(二)2010年比赛成绩(三)2011年比赛成绩二、中国机器人大赛暨RoboCup公开赛(一)2008年中国公开赛中型组足球机器人比赛成绩2008中国机器人大赛暨RoboCup中国公开赛中型组比赛名次第一名(冠军):国防科学技术大学猎豹队(NuBot)第二名(亚军):北京信息科技大学与滨州学院水队(WATER)第三名(季军):上海大学&上海工程技术大学联队中型组(Legends)第四名:南通大学胜利11人队(Victor11)中型组技术挑战规定项目奖一等奖(1名):上海大学-上海工程技术大学联队(Legends)二等奖(2名):国防科学技术大学猎豹(NuBot)队华南理工大学百步梯(SC100Steps)队三等奖(3名):西北师范大学-南阳理工学院剑龙队攀枝花学院赛英(SIEE)队江西财经大学超越者(Surpasser)队注:一等奖为得分第一名二等奖为得分第二、三名三等奖为得分第四、五、六名技术挑战自选项目奖一等奖(1名):华南理工大学百步梯(SC100Steps)队二等奖(2名):上海交通大学交龙(JiaoLong)队国防科学技术大学猎豹(NuBot)队三等奖(3名):上海大学-上海工程技术大学联队(Legends)西北师范大学-南阳理工学院剑龙队南京农业大学-淮安信息职业技术学院向前联队(Advancing)注:一等奖为得分第一名二等奖为得分第二、三名三等奖为得分第四、五、六名2008中国机器人大赛暨RoboCup中国公开赛中型组比赛获奖名单一等奖(3名):国防科学技术大学猎豹队(NuBot)北京信息科技大学与滨州学院水队(WATER)上海大学-上海工程技术大学联队中型组(Legends)二等奖(5名):南通大学胜利11人队(Victor11)北京航空航天大学-北方工业大学雏鹰队(EYAS)上海交通大学交龙队(JiaoLong)江西渝州科技职业学院渝州雄鹰队北京工商大学功夫队(KUNGFU)三等奖(7名)南京农业大学-淮安信息职业技术学院向前联队(Advancing)西北师范大学-南阳理工学院剑龙队福州大学长征队常州信息职业技术学院腾信队广东工业大学太极队(Taiji)华南理工大学百步梯队(SC100Steps)江西财经大学超越者队(Surpasser)组织奖:上海第二工业大学金海队攀枝花学院赛英(SIEE)队西安科技大学胡杨队电子科技大学中山学院博爱队湖南农业大学惟盛队河海大学e龙(E-Dragon)队天津师范大学天师Strive(TJNUSTrive)队注:一等奖为比赛的冠、亚、季军。
标准平台组竞赛规则比赛主题:本比赛主题为小型足球机器人标准平台挑战。
比赛项目包括技术挑战和展示挑战。
在技术挑战中,参赛者需要设计程序使1个机器人在有障碍的足球场地上自主完成导航和射门的任务。
在展示挑战中,参赛者设计程序使最多5个机器人做创意表演。
1.项目概述本比赛包括技术挑战和展示挑战两个项目。
中期预选赛在仿真平台上展开,最后决赛在浙江大学小型足球机器人(简称SSL)实物平台上展开。
1.1. 技术挑战技术挑战包括导航挑战和射门挑战两个子项。
1.1.1.导航挑战导航挑战要求机器人能够在不发生碰撞的情况下交替穿越场地上的障碍。
如图1所示1,场地的两个半场各放有1组障碍,每组障碍由2个障碍物组成。
障碍物为直径不大于180毫米高度不大于150mm的圆柱,中心有标准的蓝色或黄色标记。
图1中带有蓝色点的黑圆为障碍物的初始位置。
要求参赛队的1个机器人从场地中心开始,在120秒内在不碰触障碍物和场地护栏的前提下尽可能多地依次从每组障碍中间自下而上穿越,如图1中红线所示。
需要注意的是,在挑战过程中障碍物可能会有移动,且在决赛期间场地上可能会增加障碍物个数,参赛机器人需要能够处理这些情况。
1本规则所有图例标注单位均为毫米图11.1.2.射门挑战射门挑战要求机器人能够在有障碍的场地上完成射门得分。
如图2所示,场地分为前场和后场两个半场。
初始时机器人放置在后半场的球门前(即初始位置),见图2中带有绿色和白色点的黑圆。
球放置在机器人前。
前半场将放置5个障碍物。
障碍物为直径不大于180mm高度不高于150mm的圆柱,中心有标准的蓝色或黄色标记,见图2中带有蓝色点的黑圆。
障碍物位置随机,在每一轮比赛前设定后在比赛过程中位置不再变化,图2显示了一种可能的初始状态。
机器人需要在120秒内尽可能多地将球射入前场的球门。
每次进球后,球被随机摆放到距离后场底线1米内的任意位置。
每当机器人将球踢出界外,球被随机摆放到距离后场底线1米内的任意位置。
NuBot中型组足球机器人系统研究李迅;杨绍武;唐帅;董鹏;曾志文;卢惠民;于文涛;张辉;郑志强【摘要】RoboCup中型组机器人足球比赛为研究机器人技术及其他相关领域技术提供了一个标准的测试平台.本文分别从NuBot机器人平台、体系结构及行为控制、环境感知三个方面介绍了国防科大NuBot中型组足球机器人的部分关键技术及具体优势技术.【期刊名称】《机器人技术与应用》【年(卷),期】2010(000)004【总页数】3页(P14-16)【关键词】RoboCup中型组;足球机器人;机器人平台;体系结构;行为控制;环境感知【作者】李迅;杨绍武;唐帅;董鹏;曾志文;卢惠民;于文涛;张辉;郑志强【作者单位】国防科技大学机电工程与自动化学院,湖南长沙,410073【正文语种】中文【中图分类】TP21 引言RoboCup中型组比赛要求机器人是全分布式的和全自主的,必须能够通过自身携带的传感器和与队友的无线通信获得环境感知信息,使用自身携带的计算机自主完成机器人的决策控制,实现与队友的协调与协作等。
该组别比赛是机器人足球比赛中对抗程度最激烈,也最接近人类比赛的赛事。
RoboCup中型组涉及的研究内容包括机械结构设计、实时图像处理、机器人视觉、机器人自定位、目标识别与目标跟踪、运动控制、移动机器人的控制体系结构、路径和轨迹规划、机器学习、多机器人协调控制、多传感器信息融合等[1]。
国防科大RoboCup中型组猎豹队(NuBot)成立于2004年,近几年来,我们的研究兴趣主要集中于多机器人协作、鲁棒的机器人视觉、机器人控制和规划等内容。
本文分别从机器人平台、体系结构及行为控制、环境感知三个方面介绍了NuBot中型组足球机器人关键技术的研究现状及具体优势技术。
2 机器人平台2.1 机械平台及其主动控球系统自奥地利格拉茨RoboCup2009比赛后,猎豹队开发了全新的足球机器人平台,如图1所示。
机器人的运动能力尤其是加速能力与以前的机器人相比有了很大的提高。
2010中国机器人大赛暨RoboCup 中国公开赛中型组规则(Ver. 3.0)中国RoboCup中型组技术委员会2010年5月9日引言规则宗旨:1.RoboCup比赛规则不会对比赛如何进行作任何描述。
规则仅保证比赛能够公平进行,并鼓励技术和创新的发展。
2.RoboCup比赛规则应当避免对机器人的设计产生限制,包括机器人的机械结构、传感器系统、通讯设备等。
除非这些限制是促进技术进步和公平比赛的必要保证。
比如:全局视觉在中型组中是禁止的。
3.参赛球队应当避免利用规则上的漏洞或矛盾之处在特定的比赛条件下获利,如果有球队发现了这样的漏洞或者矛盾之处,应当向技术委员会报告。
设计宗旨:1.每个球队设计机器人时不应当对场地周围环境、观众、其它球队的机器人以及其它机器人怎样运作等做出自己的解释或者存在任何假设。
2.每个球队没有必要为了适应其它球队的机器人而对自己的机器人进行改动,任何这样的改动都应该是相互对等的。
规则的组成:RoboCup中型组规则有以下两个主要部分组成:1.比赛规则:国际足联规则包含于RoboCup中型组比赛规则中,根据RoboCup进行相应的修改和解释。
2.赛事规则:用于规定参赛球队资格认证等与每年的机器人足球比赛相关的事宜。
规则冲突的解决:当国际足联规则与机器人足球比赛规则冲突时:1.在国际足联规则上进行的RoboCup修改与解释,高于国际足联规则。
2.赛事规则高于国际足联规则以及在国际足联规则上进行的RoboCup修改与解释下载网站:本规则可下载于:中国自动化学会机器人竞赛工作委员会官方论坛—RoboCup中型组(MSL)比赛规则交流区/robot/showbbs.asp?bd=2&id=9042&totable=1规则的修改建议和纠正:如果对规则有任何意见或建议,请联系RoboCup中型组国内邮件列表:RoboCup_MSL_China@或者中国RoboCup中型组技术委员会:MSL_China_TC@加入RoboCup中型组国内邮件列表请访问:/group/RoboCup_MSL_China?hl=zh-CN退出RoboCup中型组国内邮件列表请发送电子邮件到:RoboCup_MSL_China-unsubscribe@目录比赛规则 (1)规则一比赛场地 (1)规则1.1尺寸 (1)规则1.2场地标识 (1)规则1.3球门区 (2)规则1.4禁区 (2)规则1.5角旗 (3)规则1.6角弧 (3)规则1.7球门 (3)规则1.8安全 (3)规则二比赛所用球 (4)规则2.1质量和尺寸 (4)规则2.2受损球的替换 (4)规则三场上机器人的数量 (6)规则3.1场上机器人 (6)规则3.2正式比赛 (6)规则3.3其他比赛 (6)规则3.4所有比赛 (6)规则3.5替换机器人的程序 (6)规则3.6替换守门员 (6)规则3.7犯规以及处罚 (7)规则四比赛队员装备 (8)规则4.1安全性 (8)规则4.2基本装备 (8)规则4.3稳定性 (14)规则4.4守门员 (14)规则4.5犯规和制裁 (15)规则4.6重新比赛 (15)规则五裁判 (16)规则5.1裁判之权威 (16)规则5.2权力与职责 (16)规则5.3裁判判决 (16)规则六助理裁判 (17)规则七比赛过程 (18)规则7.1比赛时间 (18)规则7.2中场休息 (18)规则7.3补时 (18)规则7.4点球 (18)规则7.5加时 (18)规则7.6中途终止之比赛 (18)规则八比赛的开始与重开始 (19)规则8.1赛前准备 (19)规则8.2开球 (19)规则8.3开球过程 (19)规则8.4开球的犯规及措施 (20)规则8.5争球 (21)规则8.6争球过程 (22)规则8.7争球的犯规和处罚 (22)规则九比赛的进行与暂停 (23)规则9.1比赛暂停 (23)规则9.2比赛进行 (23)规则十比赛的计分 (24)规则10.1进球得分 (24)规则10.2比赛胜利 (24)规则10.3赛事规则 (24)规则十一越位 (25)规则十二犯规行为 (26)规则12.1直接任意球 (26)规则12.2点球 (27)规则12.3间接任意球 (27)规则12.4制裁许可 (30)规则12.5警告犯规 (30)规则12.6罚出场外 (31)规则十三任意球 (32)规则13.1任意球 (32)规则13.2直接任意球 (32)规则13.3间接任意球 (32)规则13.4任意球的位置 (32)规则13.5任意球犯规/制裁 (34)规则十四点球 (35)规则14.1球以及机器人的位置 (35)规则14.2裁判 (35)规则14.3过程 (35)规则14.4犯规和惩罚 (36)规则十五边线球 (37)规则15.1边线球的过程 (37)规则15.2边线球犯规/制裁 (38)规则十六球门球 (39)规则16.1球门球的过程 (39)规则16.2球门球犯规/制裁 (40)规则十七角球 (41)规则17.1角球的过程 (41)规则17.2角球犯规/制裁 (42)赛事规则 (43)赛事规则一2010年规则的主要变化 (44)赛事规则1.0比赛规则修改原则 (44)赛事规则1.1比赛规则中需要参赛队注意的几个问题 (44)赛事规则二资格认证 (50)赛事规则2.0资格认证的必要性 (50)赛事规则2.1资格认证材料的组成 (50)赛事规则2.2资格认证材料的评分 (50)赛事规则2.3预计时间、提交、资格认证材料的评阅 (53)赛事规则2.4资格认证材料的提交方法 (53)赛事规则三裁判 (54)赛事规则3.1裁判的选择 (54)赛事规则3.2裁判的指派 (54)赛事规则3.3裁判的赛前培训 (54)赛事规则3.4比赛中的裁判 (54)赛事规则3.5违规和处罚 (55)赛事规则四竞赛规章 (56)赛事规则4.0预先说明 (56)赛事规则4.1竞赛的组成 (56)赛事规则4.2参赛队注册、安装调试、技术检查 (56)赛事规则4.3技术挑战 (57)赛事规则4.4预选赛 (57)赛事规则4.5淘汰赛 (58)赛事规则五颜色规定 (59)竞赛规则六裁判盒 (59)附 录 (60)附录1、无线路由器设置: (60)附录2、场地网络设置: (60)附录3、参赛队网络地址分配表格: (61)比赛规则规则一比赛场地选择场地的材料比赛的当地组织者负责,场地表面必须是绿色的。
场地上方可以悬挂人造光源。
规则1.1 尺寸比赛场地必须是矩形的。
边界线的长度必须长于球门线的长度。
RoboCup规规则1.2 场地标识比赛场地用线来标识。
这些线属于比赛场地。
较长的两根边界线叫做边界线。
较短的两根叫做球门线。
所有的线不能超过12.5厘米宽。
整个场地被中场线分割成两半。
中场线的中点是中心的标记。
一个半径为2米的圆环绕此点。
规则1.3 球门区场地每个末端的球门区定义如下:在距每个球门柱内侧0.75米处画两条与球门线垂直的线。
这些线延伸入场内0.75米处与一条平行于球门线的直线相交。
这些线和球门线所确定的区域就是球门区。
规则1.4 禁区场地每个末端的禁区定义如下:1.在距离每个球门柱内侧2.25米处画两条与球门线成直角的线。
这些线延伸入场内2.25米处与一条平行于球门线的直线相交。
这些线和球门线所确定的区域是禁区。
2.在每个禁区内有一个罚球点标记。
此标记距球门柱中心点3米并到两个门柱距离相等。
规则1.5 角旗规则1.6 角弧角弧:以场地边线的四个角为圆点在场地内画半径为0.75米的四分之一圆弧。
规则1.7 球门球门必须放在两边球门线的中央。
它们包括两个与角旗等距的立柱和顶部与立柱相连的横梁。
立柱相距2米,横梁下边缘离地1米。
门柱和横梁具有相同的不得超过12.5厘米的宽度和深度。
球门线与门柱和横梁等宽。
球门后面设有球网,规则1.8 安全球门必须安全的固定在地上。
便携球门只有在安全允许的情况下才能使用。
规则二比赛所用球规则2.1 质量和尺寸球是:●球形的,●有皮革或其它相应材料制成,●周长不超过70厘米(28英寸)不小于68厘米(27英寸),●在比赛开始的时候,重量不超过450克(16盎司)不低于410克(14盎司),●在海平面上(8.5lbs/sqin-15.6lbs/sqin)上的压力为0.6-1.1个大气压(600-1100克/厘米2)规则2.2 受损球的替换比赛过程中如果球爆裂或受损:●比赛停止。
●将替换球放在球损坏前的地方重启比赛(参见国际足联规则8);如果球爆裂或者受损的同时,不是在中线开球,射门,罚角球,任意球,罚球或边线罚球:●比赛相应的重新开始。
没有得到裁判允许的情况下不得比赛过程中替换球。
规则三场上机器人的数量规则3.1 场上机器人规则3.2 正式比赛规则3.4 所有比赛规则3.5 替换机器人的程序规则3.6 替换守门员任何一个场上队员都可以与守门员换位。
只要满足:●事先通知了裁判;●换人在比赛停止的状态下进行。
规则3.7 犯规以及处罚如果替补机器人在没有得到裁判允许的情况下上场:●比赛停止;●替补机器人被出示黄牌警告并且离场;●比赛在停止的时候球所在的位置以争球的方式继续。
如果在没有裁判允许的情况下替换守门员:●比赛继续;当球不在比赛状态的情况下,涉嫌犯规的机器人受到黄牌警告。
规则四比赛队员装备规则4.1 安全性规则4.2 基本装备网络监控:在比赛中,每个场地有一台制定的计算机用于网络监控。
这台计算机必须安装有两块独立的,分别支持802.11a和规则4.3 稳定性规则4.4 守门员规则4.5 犯规和制裁规则4.6 重新比赛如果球员被裁判警告处分:比赛重新开始,由对方球员在停下比赛的地方罚任意球。
规则五裁判规则5.1 裁判之权威每场比赛均由一名被委派之裁判控制,裁判拥有将比赛规则施用于该场比赛的绝对权威。
规则5.2 权力与职责规则5.3 裁判判决主裁判对于比赛事实有最终判决权。
主裁判只有在意识到其判决不正确,或者根据其判断及助理裁判的建议,确定比赛未被正常恢复的情况下才更改其判决。
规则六助理裁判助理裁判的职责(由裁判员决定):在RoboCup中每场比赛可指派一名或多名助理裁判员。
建议配备三名。
一名负责记录比赛时间与比赛成绩。
除了RoboCup规则指明的职责以外,裁判员还可指派给助理裁判其他任务。
规则七比赛过程规则7.1 比赛时间规则7.2 中场休息规则7.3 补时在每一半场中,因下列原因引起的时间损失都应补足,补时之多少由裁判员决定。
●替补;●对机器人队员损坏之估计或将受损球员移出球场;●时间的浪费;●其他原因。
规则7.4 点球●在半场结束时,若需点球或重罚点球,每一半场都须待点球结束后方能结束。