机器人运动学动力学轨迹规划
- 格式:ppt
- 大小:1.48 MB
- 文档页数:101
机器人控制原理机器人控制原理是指通过对机器人的各种部件进行控制,使得机器人能够按照人类设定的程序或者指令来执行各种任务。
机器人控制原理是机器人技术中的核心内容之一,它直接关系到机器人的运动、感知、决策等方面,是机器人能否完成任务的关键。
首先,机器人控制原理涉及到机器人的运动控制。
机器人的运动控制包括轨迹规划、运动学和动力学控制。
轨迹规划是指确定机器人在空间中的路径,使得机器人能够按照规划的路径进行运动。
运动学和动力学控制则是指根据机器人的结构和动力学特性,设计相应的控制算法,实现机器人的运动控制。
这些控制原理保证了机器人能够按照人类设定的路径和速度进行运动,从而完成各种任务。
其次,机器人控制原理还涉及到机器人的感知和定位。
机器人的感知和定位是指机器人通过各种传感器获取周围环境的信息,并根据这些信息确定自身的位置和姿态。
感知和定位是机器人能否准确地感知周围环境,做出正确的决策的基础。
在机器人控制原理中,需要设计相应的感知和定位算法,使得机器人能够准确地感知周围环境,并确定自身的位置和姿态。
此外,机器人控制原理还包括机器人的决策和路径规划。
机器人的决策和路径规划是指机器人根据感知到的环境信息,做出相应的决策,并规划出最优的路径来完成任务。
在机器人控制原理中,需要设计相应的决策和路径规划算法,使得机器人能够根据周围环境的变化,灵活地做出决策,并规划出最优的路径来完成任务。
总的来说,机器人控制原理是机器人能否按照人类的要求来完成各种任务的基础。
它涉及到机器人的运动控制、感知和定位、决策和路径规划等方面,是机器人技术中的核心内容之一。
只有深入理解和应用机器人控制原理,才能够设计出性能优良、功能强大的机器人系统,为人类社会的发展和进步做出更大的贡献。
机器人技术的动力学控制与运动规划机器人技术的发展让我们的生活发生了翻天覆地的变化,机器人不仅为我们提供了便利,还在许多工业领域代替人类完成了危险而繁重的工作。
机器人的动力学控制技术和运动规划技术是机器人实现精准和协调运动的关键,本文将对这两个方面进行探讨。
一、机器人动力学控制技术机器人的动力学控制技术是机器人实现姿态和力的控制的关键,指通过给机器人的关节施加适当的力矩,达到期望的轨迹和稳定性。
机器人的动力学模型是描述机器人状态和运动的数学模型,其中包括机器人运动学模型和动力学模型两部分。
机器人运动学模型描述机器人的位置和姿态,从而确定机器人末端执行器的位置和姿态。
机器人的运动学模型可以通过DH方法,转换矩阵法等来求得。
机器人动力学模型包含了运动学模型中未考虑的加速度、动力和物理力学等因素。
在机器人的动力学控制中,需要建立机器人的动力学模型,根据期望的应用场景和运动需求,设计控制算法,实现机器人的末端位姿控制和力控制。
机器人动力学控制技术往往需要考虑动态特性和非线性特性。
机器人动态特性体现在机器人的导数、关节角速度等方面,这些动态特性会对机器人的运动控制产生影响。
关于机器人非线性特性,可以通过设计合理的反馈策略来实现对机器人的控制。
二、机器人运动规划技术机器人运动规划技术是机器人实现高效运动的关键,指根据机器人的状态和输入,计算出使机器人达到预期的位置、姿态、路径或力的控制命令序列。
机器人的运动规划技术分为离线规划和在线规划。
离线规划指在机器人执行任务之前,使用设计好的算法,通过离线计算生成机器人的控制命令序列。
离线规划的好处是可以提高机器人的运动速度,同时,针对特定复杂任务,设计高效的运动规划算法,可以实现机器人的高效自主操作。
在线规划指在机器人执行任务的过程中,实时根据机器人的传感信息和目标状态,计算出下一步机器人应该采取的控制命令。
在线规划对于实时性要求高的场景比较适合,如医院手术室等。
机器人运动规划技术的设计需要结合任务的要求和机器人的能力特点。
机器人运动轨迹规划的说明书一、引言机器人运动轨迹规划是为了确保机器人在执行任务时能够高效、安全地完成所设计的一项关键技术。
本说明书将介绍机器人运动轨迹规划的基本原理、方法和步骤,以及相关的应用和注意事项。
二、机器人运动轨迹规划原理机器人运动轨迹规划的目标是将机器人从起始位置移动到目标位置,并避开可能存在的障碍物。
在进行轨迹规划时,需要考虑以下原理:1. 机器人定位:通过使用传感器和定位系统对机器人进行准确地定位和姿态估计。
2. 地图构建:利用激光雷达或其他传感器收集环境信息,生成机器人所在环境的地图。
3. 障碍物检测:根据地图信息,识别出机器人可能遇到的障碍物,并进行有效的障碍物检测。
4. 路径规划:根据机器人的起始位置、目标位置和障碍物信息,确定一条安全可行的路径。
5. 运动控制:通过动力学模型和运动规划算法,控制机器人的速度和姿态,使其按照规划的轨迹进行运动。
三、机器人运动轨迹规划方法根据不同的环境和任务需求,机器人运动轨迹规划常用的方法包括但不限于以下几种:1. 经典搜索算法:如A*算法、Dijkstra算法等,通过搜索问题空间找到最优路径或者近似最优路径。
2. 采样优化算法:如RRT(Rapidly-Exploring Random Trees)算法,通过随机采样和优化策略生成路径。
3. 动态规划方法:将问题分解为子问题,并根据最优子结构原理逐步求解。
4. 人工势场法:将机器人视为粒子受力的对象,根据势场计算出最优路径。
5. 机器学习算法:如强化学习和神经网络等,通过对历史数据的学习来生成路径规划策略。
四、机器人运动轨迹规划步骤机器人运动轨迹规划一般包括以下步骤:1. 获取环境信息:使用传感器和定位系统获取机器人所在环境的地图和障碍物信息。
2. 设定起始和目标位置:根据任务需求,设定机器人的起始位置和目标位置。
3. 地图建模与预处理:对获取的环境信息进行地图构建和去噪等预处理操作,以便后续规划使用。
机器人学领域中的运动学与轨迹规划机器人学是一门研究如何设计、制造和应用机器人的科学和技术。
机器人学领域中的运动学和轨迹规划是机器人学的核心内容之一。
一、运动学运动学是机器人学中研究机器人运动状态的学科,并且是一种描述机器人位置、速度和加速度等运动参数的方法。
一个完整的机器人都可以通过由多个关节组成的联动机构进行自由灵活的运动。
因此,了解每个关节的运动参数,包括角度、速度和加速度等,有助于更好地控制机器人的运动。
1. 机器人的运动学参数机器人的运动学参数包括关节角度、机器人的位姿和机器人工具端点的位姿等。
其中,各个关节的角度是决定机械臂位置的最基本的参数,机器人位姿描述机器人身体的位置、方向和姿态等信息,而机器人工具端点的位姿描述机器人工具的位置和方向信息。
了解这些运动学参数对于需要实现机器人的运动控制和规划非常重要。
机器人学家们研究如何控制和规划机器人的运动,以便机器人能够完成各种各样的任务,例如生产线上的组装、协作机器人之间的交互等。
2. 机器人的运动学模型机器人的运动学模型主要用于描述机器人的运动规律和动力学参数,包括机械结构参数、质量分布以及摩擦系数等。
运动学除了能够定义机器人的位置和运动规律外,还能够对机器人进行动力学仿真和运动规划,使机器人的控制更加精确和高效。
3. 常见的机器人运动学模型(1)PUMA模型PUMA模型是一种广泛应用于工业机器人的模型之一,其中PUMA的全称为:Programmable Universal Machine for Assembly,即用于装配的可编程通用机器。
PUMA机器人由5个自由度的旋转关节构成,使它能够沿x,y和z轴进行运动。
(2)SCARA模型SCARA(Selective Compliance Assembly Robot Arm)是一种广泛应用于装配和加工的机器人,具有三个旋转角度和一个平移自由度。
SCARA机器人通常用于精确的三维加工和装配任务,如内部器件装配、晶片制造等。
机器人的运动规划与路径规划机器人的运动规划与路径规划是人工智能和机器人领域中的重要研究方向,旨在使机器人能够高效地完成各种任务,并避免碰撞和危险环境。
本文将探讨机器人的运动规划与路径规划的基本原理、方法和应用。
一、运动规划的基本原理机器人的运动规划是指确定机器人在给定环境下的最佳运动策略,以达到特定的目标。
其基本原理在于综合考虑机器人的动力学模型、环境条件和任务需求,通过求解优化问题来确定最优的运动策略。
在运动规划中,常用的方法包括基于搜索的规划、基于图的规划和基于采样的规划。
基于搜索的规划方法通过搜索状态空间中的路径来找到最佳的运动策略,常用的算法包括A*算法和D*算法。
基于图的规划方法将环境建模为图,通过图算法求解最短路径或最优路径来实现运动规划。
基于采样的规划方法通过对机器人的动作和状态进行采样,建立运动规划的搜索空间,然后通过优化算法求解最佳路径。
二、路径规划的基本原理路径规划是指在给定的环境下,确定机器人从起始点到目标点的最佳路径。
路径规划的目标是使机器人在不碰撞的情况下快速到达目标点。
路径规划常用的方法包括基于图的路径搜索和基于采样的路径搜索。
基于图的路径搜索方法将环境建模为图,使用图算法来搜索最佳路径,常用的算法包括Dijkstra算法和A*算法。
基于采样的路径搜索方法通过对机器人的动作和状态进行采样,建立路径搜索的搜索空间,并通过优化算法找到最佳路径。
三、运动规划与路径规划的应用机器人的运动规划与路径规划在各个领域有着广泛的应用。
在工业领域,机器人的运动规划与路径规划能够使机器人在生产线上高效地完成组装、搬运等任务,提高生产效率和质量。
在医疗领域,机器人的运动规划与路径规划可以用于辅助外科手术,实现精确的定位和操作,减少手术风险。
在军事领域,机器人的运动规划与路径规划可以用于无人机的飞行路径规划,实现侦查、目标追踪等任务。
此外,机器人的运动规划与路径规划还在交通运输、物流仓储、家庭服务等领域具有广泛的应用。
基于ADAMS的机器⼈动⼒学分析及轨迹规划2.1 串联机器⼈在ADAMS中⽤连杆模拟机械臂,对两⾃由度的机械臂分别进⾏运动学分析、动⼒学分析及机械臂的轨迹规划。
2.1.1 运动学分析下⾯是建⽴模型并对模型进⾏设置分析的详细过程。
(1) 启动ADAMS/View,在欢迎对话框中选择新建模型,模型取名为Robot_arm,并将单位设置为MMKS,然后单击OK。
(2) 打开坐标系窗⼝。
按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗⼝。
当⿏标在图形区移动时,在坐标窗⼝中显⽰了当前⿏标所在位置的坐标值。
(3) 创建机械臂关节1(连杆)。
单击连杆按钮,勾选连杆的长、宽、深选项,分别将其设置为300mm、40mm、10mm,如图2.1所⽰。
在图形区单击⿏标左键,然后将连杆拖⾄⽔平位置时,在单击⿏标左键。
(4) 在连杆的右端打孔。
在⼏何建模⼯具栏单击打孔按钮,将半径Radius设置为10mm,深度设置为10mm,如图2.2所⽰。
然后在图形区模型附近单击⿏标左键,在与XY平⾯垂直的表⾯上单击⿏标左键。
然后修改孔的位置,在孔附近单击⿏标右键,选择【HOLE_1】→【Modify】,在弹出的对话框中,将Center的坐标值设置成(300,0.0,5.0),如图2.3所⽰。
(5) ⽤(3)的⽅法在关节1右端孔中⼼处创建关节2,如图2.4所⽰。
然后再将关节2向内侧平移10mm。
2.1 创建连杆设置(6)添加约束。
在关节1的左端与⼤地之间添加转动副,在关节1与关节2结合处添加转动副。
单击⼯具栏中的旋转副按钮,并将创建旋转副的选项设置为2Bod-1Loc和Normal Grid,然后在图形区单击关节1和⼤地,之后需要选择⼀个作⽤点,将⿏标移动到关节1的Marker1处出现center信息时,按下⿏标左键后就可以创建旋转副,旋转副的轴垂直于⼯作栅格。
然后⽤同样的⽅法创建关节1与关节2之间的旋转副。
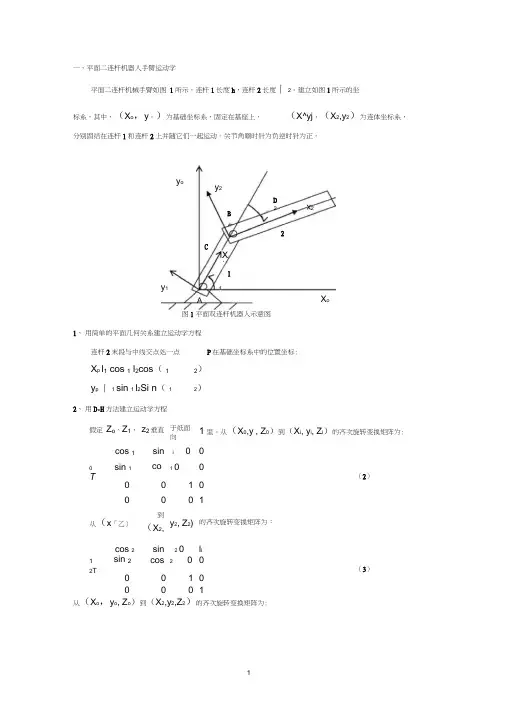
一、平面二连杆机器人手臂运动学平面二连杆机械手臂如图 1所示,连杆1长度h ,连杆2长度丨2。
建立如图1所示的坐 标系,其中,(X o ,y 。
)为基础坐标系,固定在基座上,(X^yj 、(X 2,y 2)为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。
关节角顺时针为负逆时针为正。
图1平面双连杆机器人示意图1、 用简单的平面几何关系建立运动学方程连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标:X p l 1 cos 1 l 2cos ( 1 2)y p 丨1 sin 1 l 2Si n ( 12)2、 用D-H 方法建立运动学方程假定 Z o 、Z 1、z 2垂直于纸面向1里。
从(X 0,y °, Z 0)到(X i , y i , Z i )的齐次旋转变换矩阵为:cos 1sin i 0 0sin 1co s1T(2)0 0 1 0 00 1从(x 「乙)到(X 2,y 2, Z 2)的齐次旋转变换矩阵为:cos 2 sin 2 0l i1sin 2cos20 02T(3)0 01 0 0 0 0 1从(X o ,y o , Z o )到(X 2,y 2,Z 2)的齐次旋转变换矩阵为:y oy 22B2CX11y 11X oD2 -cos1 si n 1co s 2 sin 20 l 10 0 1 sin 20T 01T 21T1cos 10 0 si n 2cos 2 0 02 1 2 00 1 0 01 00 0 1 00 1(4)co s( 1 2)si n(1 2)0 l 1 cos 1sin (12)cos( 1 2)0 l 1 sin 11 00 1那么,连杆 2 末段与中线交点处一点 P 在基础坐标系中的位置矢量为:与用简单的平面几何关系建立运动学方程( 1)相同。
械手臂末端位置坐标,这可以用于运动学仿真。
3、平面二连杆机器人手臂逆运动学建立以上运动学方程后, 若已知个机械臂的末端位置, 可以用运动学方程求出机械手臂 二连杆的关节角 1、 2 ,这叫机械臂的逆运动学。
机器人轨迹规划1. 简介机器人轨迹规划是指在给定机器人动态约束和环境信息的情况下,通过算法确定机器人的运动轨迹,以达到特定的任务目标。
轨迹规划对于机器人的移动和导航非常重要,可以用于自主导航、避障、协作操控等应用领域。
2. 常见的机器人轨迹规划算法2.1 最短路径规划算法最短路径规划算法包括Dijkstra算法、A*算法等。
这些算法通过计算机器人到达目标位置的最短路径,来规划机器人的运动轨迹。
它们通常基于图搜索的思想,对于给定的环境图,通过计算节点之间的距离或代价,并考虑障碍物的存在,确定机器人的最佳路径。
2.2 全局路径规划算法全局路径规划算法主要用于确定机器人从起始位置到目标位置的整体路径。
常见的全局路径规划算法有D*算法、RRT(Rapidly-exploring Random Tree)算法等。
这些算法通过在连续的状态空间中进行采样,以快速探索整个空间,并找到连接起始和目标位置的路径。
2.3 局部路径规划算法局部路径规划算法用于在机器人运动过程中避开障碍物或避免发生碰撞。
常见的局部路径规划算法有动态窗口算法、VFH(Vector Field Histogram)算法等。
这些算法通过感知周围环境的传感器数据,结合机器人动态约束,快速计算出机器人的安全轨迹。
3. 轨迹规划的输入和输出3.1 输入数据轨迹规划算法通常需要以下输入数据: - 机器人的初始状态:包括位置、朝向、速度等信息。
- 目标位置:机器人需要到达的位置。
- 环境信息:包括地图、障碍物位置、传感器数据等。
- 机器人的动态约束:包括速度限制、加速度限制等。
3.2 输出数据轨迹规划算法的输出数据通常为机器人的运动轨迹,可以是一系列位置点的集合,也可以是一系列控制信号的集合。
轨迹规划的输出数据应满足机器人的动态约束,并在给定的环境中可行。
4. 轨迹规划的优化与评估4.1 轨迹优化轨迹规划算法通常会生成一条初步的轨迹,但这条轨迹可能不是最优的。
机器人运动学与动力学的轨迹规划近年来,机器人技术越来越受到关注,被广泛应用于各个领域,如工业制造、医疗保健、农业等。
机器人的运动学和动力学是其中非常重要的两个方面。
在机器人的路径规划中,运动学和动力学的特性对于实现精确且高效的轨迹规划至关重要。
在机器人运动学中,研究的是机器人的位置和位姿的数学描述,包括了关节坐标和笛卡尔坐标系两种描述方法。
关节坐标系通过机器人的关节角度来描述机器人的位置和姿态,而笛卡尔坐标系则通过机器人的位姿参数来描述。
在进行轨迹规划时,机器人的运动学模型可以用来计算机器人在关节空间和笛卡尔空间中的运动路径。
运动学模型的好处在于能够将机器人的轨迹规划问题转化为几何学问题,从而简化了路径规划的计算过程。
与运动学不同,机器人的动力学研究的是机器人的运动与力之间的关系。
动力学模型可以描述机器人在进行运动时所受到的力和力矩。
动力学模型的建立需要考虑到机器人的质量、惯性、摩擦等因素,从而能够更精确地预测机器人的运动特性。
在轨迹规划中,动力学模型可以用来优化机器人的运动轨迹,以实现更加平稳、高效的运动。
轨迹规划是机器人运动控制中的一个重要问题,在实际应用中需要考虑到多种因素。
其中,避障是轨迹规划中常见的挑战之一。
通过运动学和动力学的分析,可以根据机器人的运动特性预测其可能的运动轨迹,并在规划路径时避开障碍物,以确保机器人的安全运行。
此外,路径规划还需要考虑到机器人的速度、加速度限制等因素,以保证机器人在运动过程中的动力学特性不会过于剧烈,从而降低机器人运动的顺滑性和精度。
机器人的轨迹规划可以使用多种方法,常见的包括解析法、优化法和仿真法等。
解析法是利用运动学和动力学方程直接求解轨迹规划问题,以得到机器人的运动方程和运动控制模型。
优化法则是通过设定优化目标和约束条件,利用优化算法求解最优的机器人路径规划问题。
仿真法则是通过建立机器人运动学和动力学模型,并在计算机中进行仿真,模拟机器人在不同环境下的运动情况,以寻找最佳的轨迹规划方案。
工业机器人的轨迹规划和控制S. R. Munasinghe and Masatoshi Nakamura 1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。
在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。
在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。
在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂。
在没有对这些限制进行充分考虑的情况下进行轨迹规划,通常会得到很差的表现,比如轨迹超调,末端操作器偏离给定轨迹,过度的速度波动等。
机器人在笛卡尔轨迹中的急弯处的的表现可能会更加恶化。
到目前为止很多轨迹规划算法己经被提出,从笛卡尔轨迹规划到时间最优轨迹规划。
然而,工业系统无法适应大多数的这些方法,有以下两点原因:(1)这些技术经常需要进行在目前机构中进行硬件的移动,生产过程必须被打断以进行系统重新配置,而这往往需要很长时间。
(2)这些方法中很多通常只考虑到一种约束,而很少关注工业的需求和被请求的实际的约束。
因此,它们很难在工业中实现。
在本文的观点中,我们提出了一种新的轨迹规划算法,考虑到了末端操作器的速度限制,节点加速度限制,应用中的容错度。
这些是在工业应用中实际的约束。
其他工业操作臂中的技术问题是他们的动力学延迟,这导致末端操作臂在轨迹中的拐角处出轨。
为了补救这个问题,我们设计了前向补偿,稍稍改变了拐角处的路径,使得即使在延迟动力学环节存在的情况下依然确保末端操作臂的实际跟踪轨迹。
结合了前向补偿新的轨迹规划算法在控制系统中表现为单一的前向阻塞。
它可以轻松地适应目前的工业操作臂系统,不冒风险,不花费时间重新配置硬件。
轨迹规划算法可以为所有操作臂的节点产生位置,速度和加速度的大体规划。
在大多数工业操作臂中,系统输入是节点的位置数据,这在工业中是作为被给定的数据而广为人知的。