清华大学物理实验A1三线摆和扭摆实验报告
- 格式:doc
- 大小:1.26 MB
- 文档页数:26
三线摆与扭摆实验报告三线摆与扭摆实验报告摆是物理学中常见的实验装置,通过对摆的研究可以深入了解力学和动力学的基本原理。
本次实验主要研究了三线摆和扭摆的运动规律及其相互关系。
一、实验目的本次实验的目的是通过观察和测量三线摆和扭摆的运动过程,探究摆的周期与摆长、重力加速度以及摆角等因素之间的关系。
二、实验装置与方法1. 实验装置本次实验使用的实验装置包括三线摆和扭摆,三线摆由一根细绳和一个小球组成,扭摆由一根细绳和一个重物组成。
2. 实验方法首先,我们将三线摆和扭摆分别固定在实验台上,保证它们能够自由摆动。
然后,通过改变摆长和摆角等参数,记录下摆的运动过程,并测量摆的周期。
三、实验结果与分析1. 三线摆的运动规律我们首先研究了三线摆的运动规律。
在实验过程中,我们固定了摆长,并改变了摆角。
通过观察和测量,我们发现三线摆的周期与摆角的正弦函数成正比,即周期T与摆角θ之间存在着如下关系:T = 2π√(L/g)。
2. 扭摆的运动规律接下来,我们研究了扭摆的运动规律。
在实验过程中,我们固定了摆角,并改变了摆长。
通过观察和测量,我们发现扭摆的周期与摆长的平方根成正比,即周期T与摆长L之间存在着如下关系:T = 2π√(I/k)。
3. 三线摆与扭摆的关系通过对三线摆和扭摆的运动规律的研究,我们发现它们之间存在着一定的关系。
具体来说,当摆长相等时,三线摆的周期比扭摆的周期要小。
这是因为三线摆的摆线长度比扭摆的摆线长度要长,所以摆线上的重力分量较大,从而加速了摆的运动。
四、实验结论通过本次实验,我们得出了以下结论:1. 三线摆的周期与摆角的正弦函数成正比,即周期T与摆角θ之间存在着如下关系:T = 2π√(L/g)。
2. 扭摆的周期与摆长的平方根成正比,即周期T与摆长L之间存在着如下关系:T = 2π√(I/k)。
3. 当摆长相等时,三线摆的周期比扭摆的周期要小。
五、实验总结通过本次实验,我们深入了解了摆的运动规律以及三线摆和扭摆之间的关系。
三线摆和扭摆实验报告三线摆和扭摆实验报告摆是物理学中经常用来研究力学和振动的实验装置。
本次实验主要研究了三线摆和扭摆的运动特性和影响因素。
通过观察和分析实验数据,我们可以深入了解摆的运动规律和振动特性。
一、实验目的本次实验的主要目的是研究三线摆和扭摆的运动规律,探究摆的周期与摆长、质量、重力加速度等因素之间的关系,并通过实验验证理论模型的正确性。
二、实验装置和方法1. 三线摆实验装置:实验装置由一个固定在支架上的金属球和三根不同长度的线组成。
通过改变线的长度,可以调节摆的摆长。
实验过程中,我们固定一个线的长度,然后改变其他两根线的长度,观察摆的运动情况。
2. 扭摆实验装置:实验装置由一个金属球和一根可扭转的金属棒组成。
通过扭转金属棒,可以给金属球施加扭矩,使其发生摆动。
实验过程中,我们改变扭矩的大小和方向,观察摆的运动情况。
三、实验结果与分析1. 三线摆实验结果:我们固定了一根线的长度,然后改变其他两根线的长度,观察摆的运动情况。
实验结果表明,摆的周期与摆长成正比,即摆长越长,摆的周期越长。
这符合理论模型中的预测结果。
此外,我们还发现,摆的周期与重力加速度无关,而与摆的质量有关。
质量越大,周期越长。
2. 扭摆实验结果:我们改变了扭矩的大小和方向,观察摆的运动情况。
实验结果表明,扭摆的周期与扭矩成正比,即扭矩越大,周期越长。
这也符合理论模型中的预测结果。
此外,我们还发现,扭摆的周期与摆的质量无关,而与扭矩的方向有关。
扭矩方向相同时,周期较长;扭矩方向相反时,周期较短。
四、实验误差与改进在实验过程中,我们注意到了一些误差,并提出了一些改进的方法。
首先,在三线摆实验中,由于线的粗细和摆球的形状可能会对实验结果产生影响,我们可以使用更精确的测量工具来减小误差。
其次,在扭摆实验中,由于扭矩的施加方式可能不够均匀,我们可以改进扭矩装置,使其施加的扭矩更加均匀,减小误差。
五、实验结论通过本次实验,我们得出了以下结论:1. 三线摆的周期与摆长成正比,与质量和重力加速度无关。
三线扭摆法测转动惯量实验报告
实验目的
本次实验的目的是采用三线扭摆法来测量实验系统的转动惯量。
实验设备
实验中所用到的设备有:转动实验装置、力规、垂直陀螺仪、电脑、实验平台。
实验方法
1.首先,实验者将转动实验装置放置在实验台上,将力规和垂直陀螺仪的端子插好母座,在实验台上安装内芯转动物体,将其接在实验台上。
2.第二步,实验者用力规通过三条彼此相交的绳索将转动物体夹紧起来,在控制台的显示屏上选择“三线扭摆”,然后调节三条绳索的长度,使其充满能量。
3.第三步,实验者将垂直陀螺仪垂直放置在实验台上,并将它连接到电脑;然后实验者用软件记录物体的振动曲线。
4.第四步,实验者将参数归一,通过观察得到相应的T时间,最后将量测结果和参数结果相乘得出实验系统的转动惯量。
实验结果
实验中,实验者用力规将内芯转动物体夹紧,通过软件将转动惯量的变化曲线获得T 时间,用T时间和绳索拉力的乘积得出本次实验的转动惯量为7.85kg·m2。
2.本次实验中,实验者获得的转动惯量是7.85kg·m2。
3.在这次实验中,实验者应注意力规夹紧物体时要更加小心,实验者也应当时刻调整物体的振动曲线,以确保精确的实验数据。
总结
本次实验采用的是三线扭摆法测量实验系统的转动惯量,实验结果表明,实验系统的转动惯量为7.85kg·m2。
实验者应该更加小心地将力规夹紧物体并实时调整物体的振动曲线,才能获取更准确的实验数据。

清华大学三线摆和扭摆试验物理实验完整报告班级姓名学号结稿日期:三线摆和扭摆实验一、实验目的1. 加深对转动惯量概念和平行轴定理等的理解;2. 了解用三线摆和扭摆测量转动惯量的原理和方法;3. 学习电子天平、游标高度尺和多功能数字测量仪等仪器的使用,掌握测量质量和周期等量的测量方法。
二、实验装置和原理1.三线摆:如图一,上、下圆盘均处于水平,悬挂在横梁上。
横梁由立柱和底座支承着,三根对称分布的等长悬线将两个圆盘相连。
上圆盘可以固定不动。
拧动旋钮就可以使得下圆盘绕中心轴OO ’作扭摆运动。
当下圆盘的摆角很小且忽略空气阻力和悬线扭力影响时,可推出下圆盘绕中心轴OO ’的转动惯量为:200024m gRr J T Hπ=其中,0m 是下圆盘质量,g 取29.80m s -,r 为上圆盘半径,R 为下圆盘半径,H 为平衡时上下圆盘的垂直距离,0T 为下圆盘摆动周期。
图1 三线摆示意图将质量为m 的待测刚体放在下圆盘上,并使它的质心位于中心轴OO ’上,测出此时的摆动周期T 和上下圆盘之间的垂直距离1H ,则待测刚体和下圆盘对于中心轴OO ’的总转动惯量1J 为:()021214m m gRr J T H π+=且待测刚体对于中心轴OO ’的转动惯量10J J J =-。
利用三线摆可以验证平行轴定理。
平行轴定理指出:如果一个刚体对于通过质心的某一转轴的转动惯量为c J ,则这个刚体对平行于该轴且相距为d 的另一转轴的转动惯量为:2x c J J md =+式中,m 为刚体的质量。
图2 三个孔均匀分布在本实验中,将三个等大的钢球对称分布在下圆盘的三个均匀分布的孔(如图2)上,测出三个球对于中心轴OO ’的转动惯量x J 。
如果测得的x J 的值与由2x c J J md =+右式计算得到的结果比较相对误差在测量允许的范围内()005≤,则平行轴定理得到验证。
本实验中,用于测量基本物理量的仪器还有:电子天平,游标高度尺,配有光电接收装置的多功能数字测量仪。
三线摆和扭摆实验报告三线摆和扭摆实验报告引言:三线摆和扭摆是物理学中经典的实验,通过对它们的研究可以深入理解振动和波动的基本原理。
本实验旨在通过观察和测量三线摆和扭摆的运动来探究它们的特性和规律。
实验一:三线摆三线摆是由一个重物通过三根不同长度的线组成,悬挂在固定支点上的一种装置。
在这个实验中,我们将研究三线摆的周期与摆长之间的关系。
实验装置:1. 三线摆装置2. 计时器3. 钢球实验步骤:1. 将三线摆装置固定在支架上,并调整线的长度为不同值。
2. 将钢球拉至一侧,释放并开始计时。
3. 记录钢球来回摆动的时间,并计算出周期。
4. 重复以上步骤,每次改变线的长度。
实验结果:通过多次实验得到的数据,我们可以绘制出三线摆周期与摆长之间的关系曲线。
实验结果表明,三线摆的周期与摆长的平方根成正比。
这一结果与理论预期相符,验证了摆动周期与摆长之间的关系。
实验二:扭摆扭摆是由一个悬挂在支点上的细线和一个重物组成的装置。
在这个实验中,我们将研究扭摆的周期与振幅之间的关系。
实验装置:1. 扭摆装置2. 计时器3. 钢球实验步骤:1. 将扭摆装置固定在支架上,并调整细线的长度。
2. 将钢球拉至一侧,释放并开始计时。
3. 记录钢球来回摆动的时间,并计算出周期。
4. 重复以上步骤,每次改变振幅。
实验结果:通过多次实验得到的数据,我们可以绘制出扭摆周期与振幅之间的关系曲线。
实验结果表明,扭摆的周期与振幅成正比。
这一结果与理论预期相符,验证了振动周期与振幅之间的关系。
实验讨论:通过对三线摆和扭摆的实验研究,我们发现它们的振动特性与摆长、振幅之间存在一定的关系。
这些关系可以通过数学模型进行描述和预测,为进一步研究振动和波动提供了理论基础。
结论:三线摆和扭摆实验结果验证了振动周期与摆长、振幅之间的关系。
这一研究对于理解振动和波动的基本原理具有重要意义,也为其他领域的应用提供了基础。
通过进一步深入研究,我们可以探索更多有关振动和波动的规律和特性。
三线摆测转动惯量实验报告一、实验目的1.1 理解转动惯量的定义和计算方法1.2 掌握三线摆测转动惯量的方法和步骤2.1 通过实验,提高动手能力和实验操作技巧2.2 培养团队协作精神和科学探究能力3.1 分析实验数据,得出结论3.2 提高对物理学知识的理解和应用能力二、实验器材与材料1. 三线摆:一个固定在支架上的三线摆,摆锤长度约为30cm,摆角为0°至180°。
2. 弹簧秤:用于测量物体的质量。
3. 细绳:用于连接三线摆的摆锤和固定点。
4. 计时器:用于记录实验时间。
5. 笔记本:用于记录实验数据和观察现象。
6. 砝码:用于校准弹簧秤。
三、实验步骤与方法1. 将三线摆调整到水平状态,确保摆锤与固定点在同一水平线上。
然后,用细绳将摆锤与固定点连接起来,使细绳呈“8”字形。
2. 用砝码校准弹簧秤,使其精确度达到0.1g。
3. 将待测物体(如小球)放在三线摆的摆锤上,记录物体的质量m和摆锤的高度h。
注意保持物体与摆锤之间的相对位置不变。
4. 使用计时器记录物体从静止开始到达平衡位置所需的时间t。
重复以上步骤多次,取平均值作为实验数据。
5. 根据实验数据,计算出物体的转动惯量I和摆长L的关系式:I = (m * L^2) /2h^2。
其中,m为物体质量,L为摆长,h为摆锤高度。
6. 分析实验结果,讨论转动惯量与物体质量、摆长等因素之间的关系。
四、实验结果与讨论通过本次实验,我们成功地测量了三线摆测转动惯量的方法,并得出了物体转动惯量与质量、摆长之间的关系。
在实验过程中,我们不仅提高了动手能力和实验操作技巧,还培养了团队协作精神和科学探究能力。
在实验过程中,我们发现物体的质量越大,转动惯量越大;摆长越长,转动惯量也越大。
这与理论知识相符,说明我们的实验方法是正确的。
我们还观察到了一些有趣的现象,如当物体质量较小时,需要增加计时器的精度才能准确记录物体到达平衡位置的时间;当摆长较大时,需要增加砝码的重量才能使弹簧秤精确度达到0.1g。
三线摆实验报告数据三线摆实验报告数据摘要:本实验通过对三线摆的实验研究,测量了摆线的周期和振幅,并通过数据分析和计算,得出了摆线的理论值和实际测量值之间的差异,并对实验结果进行了讨论。
引言:三线摆是一种经典的物理实验,通过研究摆线的运动规律,可以深入理解振动和周期的概念。
本实验旨在通过实际测量和数据分析,验证摆线的周期与振幅之间的关系,并探讨实验结果与理论值之间的差异。
实验装置和方法:实验装置包括一个支架、三个线摆和一个计时器。
首先调整线摆的长度和角度,使其能够自由摆动。
然后,通过计时器测量摆线的周期和振幅。
实验过程中,保持其他条件不变,仅改变振幅的大小,进行多组实验数据的收集。
实验数据和结果:在实验中,我们选择了不同的振幅进行测量,并记录了每组实验的周期和振幅数据。
以下是实验数据的统计结果:振幅(cm)周期(s)1 1.22 1.83 2.44 3.05 3.6通过对实验数据的分析,我们可以得出以下结论:1. 摆线的周期与振幅之间存在正比关系,即振幅越大,周期越长。
这符合我们对振动运动的基本认识。
2. 实验数据与理论值存在一定的差异。
在理论上,摆线的周期与振幅之间应该满足T=2π√(L/g),其中T为周期,L为线摆长度,g为重力加速度。
然而,实验结果显示周期与振幅之间的关系不完全符合理论预期。
这可能是由于实验中存在的一些误差导致的。
讨论和误差分析:实验中可能存在的误差包括实际线摆长度与测量值之间的差异、计时器的误差以及空气阻力的影响等。
这些误差可能导致实验结果与理论值之间的差异。
为了减小误差,我们可以采取以下措施:1. 确保线摆的长度和角度调整准确,尽量减小实际长度与测量值之间的误差。
2. 使用精确的计时器,并进行多次测量取平均值,以减小计时器误差的影响。
3. 在实验中尽量减小空气阻力的影响,可以通过在实验过程中保持室内空气静止或者使用真空环境等方式来实现。
结论:通过本实验,我们验证了摆线的周期与振幅之间的关系,并讨论了实验结果与理论值之间的差异。
三线摆测转动惯量实验报告【三线摆测转动惯量实验报告】在物理学的海洋里,有一个神秘的小岛叫做“转动惯量”,它就像是一块隐形的石头,静静地躺在我们身边,却总是被忽略。
今天,我们就来探索这个小岛的秘密,用一颗好奇的心去发现它的存在。
让我们来定义一下什么是转动惯量。
转动惯量,简单来说,就是物体旋转起来时,保持平衡所需要的力矩大小。
这就像是你玩陀螺时的感觉,当你握住陀螺,让它开始转动,你会感觉到一股力量在推动着它,这股力量就是你的陀螺的转动惯量。
那么,如何测量一个物体的转动惯量呢?这就不得不提到我们今天的主角——三线摆了。
三线摆,听起来是不是有点复杂?其实,它就像是一个缩小版的陀螺,只不过它的结构更简单,更容易操作。
想象一下,你有一个线轴,上面挂着一根细线,线的另一端系着一个小球。
这个小球就像是你的陀螺,而线轴和细线就像是你的手臂,它们一起构成了一个可以自由旋转的系统。
现在,你要做的就是让这个系统开始旋转,然后观察它的稳定性。
如果你的手稍微一动,小球就会偏离原来的位置,这就是因为你的手臂提供了额外的转动惯量。
通过调整线轴和细线的长度,你可以改变系统的转动惯量。
当转动惯量越大时,系统越稳定;反之,则越容易受到干扰。
这就是转动惯量的神奇之处,它能够让你控制物体的运动轨迹,就像是一位魔法师,悄悄地在你的手中施展魔法。
在实验中,我们通常会使用一个秤来测量三线摆的质量。
这个秤就像一个聪明的裁判,它知道什么时候该给分数,什么时候该扣分。
当我们把三线摆挂在秤上,秤会告诉我们这个小球的质量。
有了质量,我们就可以计算出转动惯量了。
计算转动惯量并不难,我们只需要将小球的质量乘以其半径的平方,再除以2,就可以得出转动惯量。
这个过程就像是在做数学题,虽然看起来有些复杂,但只要掌握了方法,就能轻松解决。
我们来总结一下今天的实验成果。
通过我们的三线摆实验,我们不仅学会了如何测量转动惯量,还体会到了科学的乐趣和神奇。
在这个实验中,我们像是在进行一场小小的冒险,探索未知的世界,寻找隐藏在背后的奥秘。
三线扭摆的实验报告三线扭摆的实验报告引言:三线扭摆是一种经典的物理实验,通过对其运动规律的研究,可以深入理解振动和波动的基本原理。
本次实验旨在通过对三线扭摆的观察和测量,探究其运动特性和影响因素,为物理学的学习提供实际案例。
实验装置:实验中使用的三线扭摆装置包括一个固定的横梁,上面悬挂有三根细线,每根细线上分别固定了一个质量较小的小球。
在实验过程中,通过对小球的摆动进行观察和测量,可以得到有关振动和波动的数据。
实验步骤:1. 调整装置:首先,将三线扭摆装置固定在实验台上,并确保横梁水平。
然后,调整每根细线的长度,使得三个小球在静止时处于同一水平面上。
2. 观察振动现象:轻轻将中间的小球向一侧拉动,然后松手观察。
记录下小球的摆动过程,包括振动的幅度、周期和频率等数据。
3. 改变质量:在保持细线长度不变的情况下,更换小球的质量,重复步骤2。
比较不同质量小球的振动特性,分析质量对振动的影响。
4. 改变长度:保持小球质量不变,改变细线的长度,重复步骤2。
观察并记录不同长度细线下的振动情况,分析长度对振动的影响。
实验结果与讨论:通过实验观察和测量,我们得到了三线扭摆的振动现象,并进行了数据分析。
以下是我们的实验结果与讨论。
1. 振动特性:我们观察到,三线扭摆的振动幅度随着时间的推移逐渐减小,最终趋于平衡位置。
振动的周期和频率与细线的长度、小球的质量有关。
较长的细线和较轻的小球会导致较大的振动周期和频率。
2. 影响因素:质量是影响振动特性的重要因素之一。
较大质量的小球在摆动时,惯性力较大,振动幅度较小。
而较小质量的小球则相对容易受到外力的干扰,振动幅度较大。
长度也会影响振动特性。
较长的细线会导致振动周期和频率较大,而较短的细线则会使振动更为迅速。
3. 振动与波动的联系:三线扭摆的摆动过程实际上是一种周期性的振动,而振动又是波动的基本形式之一。
通过观察三线扭摆的振动现象,我们可以更好地理解波动的基本特性,如波长、频率和振幅等。
三线摆实验报告————————————————————————————————作者:————————————————————————————————日期:实验题目:三线摆实验目的:掌握用三线摆测定物体的转动惯量的方法,验证转动惯量的平行轴定理实验原理:两半径分别为r 、R (R >r )的刚性圆盘,用对称分布的三条等长的无弹性、质量可以忽略的细线相连,上盘固定,则构成一振动系统,称为三线摆。
如右图,在调平后,利用上圆盘以及悬线张力使下圆盘扭转振动,α为扭转角。
当α很小时,可以认为就是简谐振动,那么:ghm E p 0=2020)(21)(21dtdh m dt d I E k +=α其中m 0为下盘质量,I 0为下盘对OO 1轴的转动惯量。
若忽略摩擦,有E p +E k =恒量。
由于转动能远大于平动能,故在势能表达式中略去后一项,于是有:.)(21020Const gh m dtd I =+α由于α很小,故容易计算得:H Rr h 22α=联立以上两式,并对t 求导有:ααH I gRr m dt d 0022-=解得:H I gRr m 002=ω又由于T 0=2π/ω,于是解得:22004T H gRr m I π=若测量一个质量为m 的物体的转动惯量,可依次测定无负载和有负载(质心仍在OO 1上,忽略其上下的变化)时的振动周期,得:])[(42002102T m T m m H gRr I -+=π通过改变质心与三线摆中心轴的距离,测量I a 与d 2的关系就可以验证平行轴定理I a =I c +md 2。
实验仪器:三线摆(包括支架、轻绳、圆盘等)、水平校准仪、游标卡尺、直尺、秒表、钢圈、(两个相同规格的圆柱形)重物实验内容:1、对三线摆的上盘和下盘依次进行水平调节;2、测量系统的基本物理量,包括上盘直径、下盘直径、上下盘之间距离、钢圈内外径,每个物理量测量三次,同时根据给出的数据记录当地重力加速度、下盘质量、钢圈质量、重物质量、悬点在下盘构成的等边三角形的边长;3、下盘转动惯量的测量:扭动上盘使三线摆摆动,测量50个周期的时间,重复三次;4、钢圈转动惯量的测量:将钢圈置于下盘上,使钢圈圆心和下盘圆心在同一竖直轴线上,扭动上盘使系统摆动,测量50个周期的时间,重复三次;5、验证平行轴定理:取d=0、2、4、6、8cm ,将两个重物对称置于相应位置上,让系统摆动,测量50个周期的时间,每个对应距离测量三次。
三线摆与扭摆实验报告(共10篇)三线摆实验报告课题用三线摆测物理的转动惯量教学目的1、了解三线摆原理,并会用它测定圆盘、圆环绕对称轴的转动惯量;2、学会秒表、游标卡尺等测量工具的正确使用方法,掌握测周期的方法;3、加深对转动惯量概念的理解。
重难点1、理解三线摆测转动惯量的原理;2、掌握正确测三线摆振动周期的方法。
教学方法讲授、讨论、实验演示相结合学时3个学时一、前言转动惯量是刚体转动惯性的量度,它的大小与物体的质量及其分布和转轴的位置有关对质量分布均匀、形状规则的物体,通过简单的外形尺寸和质量的测量,就可以测出其绕定轴的转动惯量。
但对质量分布不均匀、外形不规则的物体,通常要用实验的方法来测定其转动惯量。
三线扭摆法是测量转动惯量的优点是:仪器简单,操作方便、精度较高。
二、实验仪器三线摆仪,游标卡尺,钢直尺,秒表,水准仪三、实验原理1、原理简述:将三线摆绕其中心的竖直轴扭转一个小小的角度,在悬线张力的作用下,圆盘在一确定的平衡位置左右往复扭动,圆盘的振动周期与其转动惯量有关。
悬挂物体的转动惯量不同,测出的转动周期就不同。
测出与圆盘的振动周期及其它有关量,就能通过转动惯量的计算公式算出物体的转动惯量。
2、转动惯量实验公式推导如图,将盘转动一个小角,其位置升高为h,增加的势能为mgh;当盘反向转回平衡位置时,势能E?0,此时,角速度?最大,圆盘具有转动动能:E?J0?02/2则根据机械能守恒有:mgh?J0?02/2 (1)上式中的m0为圆盘的质量,?0为盘过平衡位置时的瞬时角速度,J0为盘绕中心轴的转动惯量。
当圆盘扭转的角位移?很小时,视圆盘运动为简谐振动,角位移与时间t的关系为:0sin(2?t/T0??)(2)经过平衡位置时最大角速度为将?0代入(1)式整理后得式中的h是下盘角位移最大时重心上升的高度。
由图可见,下盘在最大角位移?0时,上盘B点的投影点由C点变为D点,即h?CD?BCBC2AB2BD2A'B2A'B2(R2r考虑到AB?A'所以因为?0很小,用近似公式sin?0??0,有将h代入式,即得到圆盘绕OO'轴转动的实验公式设待测圆环对OO'轴的转动惯量为J。
三线摆法物理实验报告三线摆是物理学中经典的实验之一,通过三根线吊挂物体,使其形成三线摆,可以研究摆动的规律和特性。
本文将探讨三线摆的原理、实验装置和实验结果,并给出相关引用参考。
一、原理三线摆实验的原理基于牛顿力学中的力学定律,主要有两个方面的力:1. 重力:物体受重力的作用,导致电线向下挠曲,产生阻力。
2. 张力:电线的张力使物体向中心位置回复,同时产生一个向心力。
二、实验装置及步骤实验所需装置如下:1. 三个等长的轻质细线,分别用于悬挂物体和支撑架。
2. 物体:可以是质点、小球等,重量适中即可。
3. 细尺子或测量计算长度、角度等。
实验步骤如下:1. 挂好悬挂线:将三根等长的轻质细线固定在一起并悬挂在支撑架上,确保线的长度一致。
2. 悬挂物体:将物体用第四根线系在三个支撑线的交点处,使物体悬挂在支撑线之下。
3. 初始化:使摆系统保持在静止状态,可轻轻拉动物体使其离开平衡位置并释放。
三、实验结果与讨论三线摆实验的结果可以通过观察物体摆动的规律和测量数据来确定。
常见的实验结果有:1. 振动周期:可以通过计时器或停表测量物体从一个极点到另一个极点所需的时间,然后求取平均值。
2. 摆动角度:可以通过放置一个刻度圆盘或使用测角器来测量物体的角度,并记录摆动幅度。
3. 总摆动时间:可以通过观察物体摆动的总时间来评估三线摆的稳定性和耗散情况。
通过观察实验结果和分析实验数据,可以得出一些结论和讨论:1. 摆长对振动周期的影响:在固定其他条件下,摆长越长,振动周期越大。
2. 摆动角度对周期的影响:当角度较小时,小角度近似成立,摆动周期与摆动角度几乎无关。
3. 阻力对振动周期的影响:阻力的存在会使摆动周期变长,耗散能量,使振幅逐渐减小。
四、相关引用参考以下是关于三线摆的典型实验和文献,供进一步阅读参考:1. 《大学物理实验》(宗琪等,北京理工大学出版社,2013年)2. 《实验物理学》(吴国权,北京大学出版社,2017年)3. 《物理学实验技术》(吴发禄等,清华大学出版社,2010年)4. Chen, L. Q., Chen, M. X., & Yang, R. (2017). Experimental Investigation of the Plane Pendulum by Three Strings. Journal of Physics: Conference Series, 901, 012001.5. Antonopoulos-Domis, M., Mikellides, I. G., & Kalogirou, A. (2018). Theoretical and experimental treatment of the triplumb bob pendulum. European Journal of Physics, 39(2), 025402.6. Debasish, M., Baruah, P., Bhattacharjee, M., & Borthakur, S. (2015). Three string pendulum: a low-cost student experiment. Physics Education, 50(4), 484.以上是近期中英文文献中关于三线摆实验的参考资料,它们包含了三线摆实验的理论分析和实验结果,可以为进一步研究和探索这一实验提供帮助。
三线摆测物体转动惯量实验报告一、实验背景在物理学中,转动惯量是一个至关重要的概念。
它决定了物体在转动时的惯性。
咱们的实验旨在通过三线摆测量不同物体的转动惯量,搞明白它们的转动特性。
想象一下,拿着一个铁球,转动时的感觉和拿着一个木块完全不同,这就是转动惯量在作祟。
1.1 三线摆的原理三线摆,简单说就是利用重力和摆动来测量。
三个线圈,连接在一起,像一根灵活的触手。
摆动起来,底下的重物受力,旋转的状态便可捕捉。
这种方法虽然看似简单,但却是极其有效的。
1.2 测量步骤先把物体挂上去,调整好位置。
然后轻轻放手,观察摆动的幅度和周期。
记录下数据,慢慢汇总。
大家都知道,细节决定成败,尤其是在这样的实验中。
二、实验过程实验过程中,我们遇到了一些小插曲。
开始的时候,摆的角度没调好,导致数据偏差。
但这也没关系,调试一下,重新开始。
每一次摆动,都是一次新的发现。
2.1 数据记录数据记录至关重要,不能马虎。
每一次摆动后,尽量记录清楚,确保数据的准确性。
比如,摆动的周期、角度,甚至是环境的温度,都是影响因素。
我们小组成员认真对待,每个人的脸上都流露出专注。
2.2 分析数据有了数据,就得分析。
利用公式计算转动惯量,得出结果。
每个人都有自己的计算方法,大家聚在一起讨论时,那种氛围热烈得很。
有人提出了不同的看法,互相启发,真是妙不可言。
2.3 实验结果最终,我们得到了不同物体的转动惯量。
通过对比,我们发现重物的形状和质量分布对结果有显著影响。
比如,圆形物体的转动惯量往往小于方形的。
这些结果让我们对物理有了更深的理解。
三、实验总结经过一系列的测量与分析,我们不仅获得了数据,还领悟到了一些更深层次的道理。
转动惯量并不是一个孤立的概念,它与物体的形状、质量都有密切关系。
3.1 实验收获在这个过程中,大家的团队合作意识提升了。
每个人都在为共同的目标努力,讨论中充满了智慧的碰撞。
每个人的想法都是一颗珍珠,串联在一起,形成了我们的“知识项链”。
三线扭摆法测转动惯量实验报告三线扭摆法测转动惯量实验报告引言转动惯量是描述物体对转动的惯性的物理量,它在物理学和工程学中具有重要的应用价值。
本实验通过使用三线扭摆法来测量物体的转动惯量,以探究该方法的原理和应用。
实验目的1.了解三线扭摆法的原理和测量方法;2.掌握转动惯量的测量技术;3.验证三线扭摆法测量转动惯量的准确性。
实验器材1.三线扭摆装置;2.测力计;3.物体样品(如圆柱体、长方体等);4.计时器;5.尺子。
实验步骤1.将三线扭摆装置固定在实验台上,并调整好水平;2.将测力计固定在三线扭摆装置的下方,并将其连接到物体样品上;3.用尺子测量物体样品的几何参数,如长度、直径等;4.将物体样品悬挂在三线扭摆装置上,并使其平衡;5.对物体样品进行扭摆,记录下测力计的读数和扭摆的时间;6.重复上述步骤3-5,分别对不同的物体样品进行测量。
实验数据处理根据实验记录的数据,我们可以通过以下步骤来计算物体样品的转动惯量:1.根据测力计的读数和扭摆的时间,计算出物体样品的扭摆力矩;2.根据物体样品的几何参数,计算出其质量和质心位置;3.根据扭摆力矩和质心位置,计算出物体样品的转动惯量。
实验结果与分析通过实验测量得到的转动惯量数据,我们可以对不同物体样品的转动惯量进行比较和分析。
通过比较不同物体样品的转动惯量,我们可以发现它们之间的差异和规律。
例如,对于相同形状的物体样品,其转动惯量与其质量和几何参数有关;而对于不同形状的物体样品,其转动惯量还与其形状的分布情况有关。
实验结论通过本实验,我们了解了三线扭摆法的原理和测量方法,并掌握了转动惯量的测量技术。
通过比较不同物体样品的转动惯量,我们发现了转动惯量与质量、几何参数和形状分布之间的关系。
实验结果表明,三线扭摆法是一种准确可靠的测量转动惯量的方法。
结语转动惯量是描述物体对转动的惯性的重要物理量,对于理解物体的转动运动和应用于工程设计中具有重要意义。
通过本实验,我们不仅学习了三线扭摆法的原理和应用,还掌握了转动惯量的测量技术。
清华大学物理实验A1三线摆和扭摆实验报告清华大学三线摆和扭摆试验物理实验完整报告班级姓名学号结稿日期:三线摆和扭摆实验一、实验目的1. 加深对转动惯量概念和平行轴定理等的理解;2. 了解用三线摆和扭摆测量转动惯量的原理和方法;3. 学习电子天平、游标高度尺和多功能数字测量仪等仪器的使用,掌握测量质量和周期等量的测量方法。
二、实验装置和原理1.三线摆:如图一,上、下圆盘均处于水平,悬挂在横梁上。
横梁由立柱和底座支承着,三根对称分布的等长悬线将两个圆盘相连。
上圆盘可以固定不动。
拧动旋钮就可以使得下圆盘绕中心轴OO ’作扭摆运动。
当下圆盘的摆角很小且忽略空气阻力和悬线扭力影响时,可推出下圆盘绕中心轴OO ’的转动惯量为:200024m gRr J T Hπ=其中,0m 是下圆盘质量,g 取29.80m s -g ,r 为上圆盘半径,R 为下圆盘半径,H 为平衡时上下圆盘的垂直距离,0T 为下圆盘摆动周期。
图1 三线摆示意图将质量为m 的待测刚体放在下圆盘上,并使它的质心位于中心轴OO ’上,测出此时的摆动周期T 和上下圆盘之间的垂直距离1H ,则待测刚体和下圆盘对于中心轴OO ’的总转动惯量1J 为:()021214m m gRr J T H π+= 且待测刚体对于中心轴OO ’的转动惯量1J JJ =-。
利用三线摆可以验证平行轴定理。
平行轴定理指出:如果一个刚体对于通过质心的某一转轴的转动惯量为cJ ,则这个刚体对平行于该轴且相距为d 的另一转轴的转动惯量为:2xcJ J md =+式中,m 为刚体的质量。
图2 三个孔均匀分布在本实验中,将三个等大的钢球对称分布在下圆盘的三个均匀分布的孔(如图2)上,测出三个球对于中心轴OO ’的转动惯量xJ 。
如果测得的xJ 的值与由2xc JJ md =+右式计算得到的结果比较相对误差在测量允许的范围内()005≤,则平行轴定理得到验证。
本实验中,用于测量基本物理量的仪器还有:电子天平,游标高度尺,配有光电接收装置的多功能数字测量仪。
2.扭摆:实验中使用的扭摆结构如右图(图3),根据刚体转动定理有:''0M J θ=其中,M 是悬线因扭转产生的弹性恢复力矩,J 为刚体对于悬线轴的转动惯量,''θ为角加速度。
弹性恢复力矩M 与转角θ的关系为:M K θ=-图3 三爪盘扭摆其中,K 为扭转模量,它与悬线长度L ,悬线直径d 及悬线材料的切变模量G 有如下关系:432Gd K Lπ=扭摆运动的微分方程为:''0K J θθ=-可见,圆盘作简谐运动,其周期为:002J T Kπ= 本实验中K 未知,所以用一个对质心轴转动惯量为1J 的附加物体加到盘上,并使其质心位于扭摆悬线上,组成复合体。
此复合体对于悬线轴的转动惯量为1JJ +,复合体的摆动周期T 为:2T =因此得到:2001220T J J T T =- 212204K J T T π=-测出0T T 和后就可以计算盘的转动惯量0J 和悬线的切变模量G 。
本实验中利用两个直径不同的金属环,将其嵌套在三爪盘的台阶上。
圆环对与悬线的转动惯量1J 由下式计算:()2211128m J D D =+式中1m 是圆环质量,12D D 和分别为圆环的内外直径。
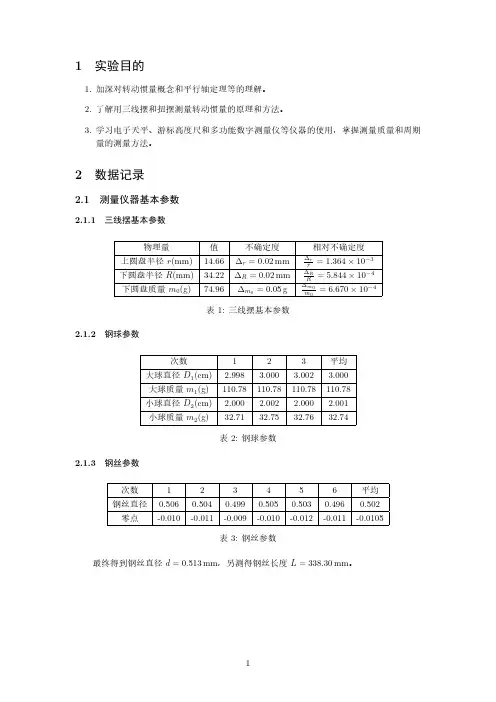
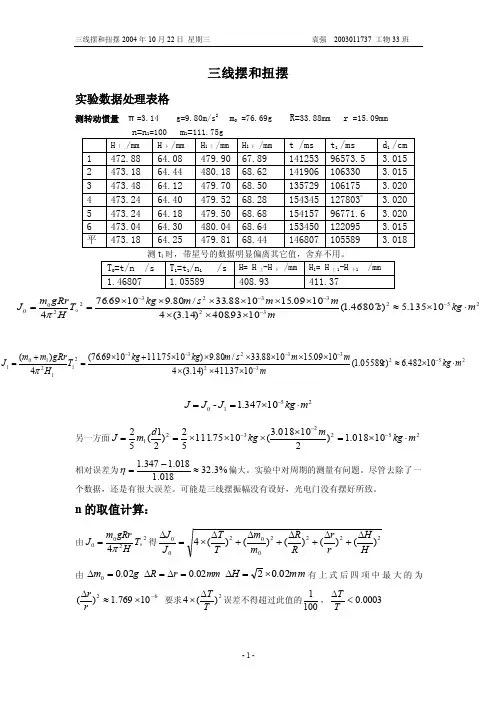
三、数据记录1、测量仪器基本参数 (1)三线摆基本参数:(2)钢球参数:①直径:②质量:2. 三线摆实验 (1)估算周期数0n取n=6,粗略测量0T 。
测得60T =8.2980s ,所以T =1.3830s 。
又由公式00000221,,,3t T m r R H maxT nT r R m H ∆∆∆⎧⎫∆∆∆=≤⎨⎬⎩⎭仪得,0002,,,3t m r R H maxn T r R m H ∆≥∆⎧⎫∆∆∆⎨⎬⎩⎭仪。
又由比较得,00,,,m r R H rmax r R m H r∆⎧⎫∆∆∆∆=⎨⎬⎩⎭,且10t ms∆=仪,所以代入数据可以求得,31.71366595n ≥,故取032n =。
(2)三线摆周期测量: ①空摆032n =,0523.3286.80436.52H H mm mm mm==-=,75.10m g =s②加大球032n =,1523.3285.78437.54H mm mm mm=-=,1110.69M g=③对称加三个小球032n=,2523.3285.90437.42H mm mm mm=-=,231.85M g=每个小球到中心轴OO’距离为121.91R mm=3.扭摆实验(1)钢丝参数测量:①直径mm钢丝直径为()00.508833333--0.0053333330.514166666d d d mm mm mm=-==②钢丝长度钢丝上端高度:1519.02L mm =;钢丝下端高度:2195.50L mm=;钢丝长度为:12519.02195.50323.52L L L mm mm mm=-=-=(2)大环和小环参数测量: ①质量:大环质量199.50m g =,小环质量260.32mg=。
②内外径:(3)扭摆周期测量:d mm=钢丝长度n=钢丝直径0.51416666620=L mm323.52①空摆②加大环③加小环四、数据处理1.用三线摆测定下圆盘对于中心轴OO ’的转动惯量:由00000221,,,3t T m r R H maxT nT r R m H ∆∆∆⎧⎫∆∆∆=≤⎨⎬⎩⎭仪, 可知0341010 3.1251032t T ssn --∆⨯∆===⨯仪下圆盘对于中心轴OO ’的转动惯量()()20002-3-3-322-352475.10109.8034.191014.6210 1.4571093754436.52104.53244880910m gRr J T Hkg m ππ-=⨯⨯⨯⨯⨯⨯=⨯⨯⨯=⨯g相对不确定度:031.68671926410 1.710J J -∆===⨯≈⨯3-()()00-358282001.68671926410 4.532448809107.64496872110810J J J kg m kg m J ---∆∆==⨯⨯⨯=⨯≈⨯g g ()8204532810J kg m -∴=±⨯g大钢球和下圆盘对于质心轴的转动惯量:()()()()0121121-3-3-322-352475.10110.69109.8034.191014.6210 1.0268177084437.54105.55525608910m M gRr J TH kg m ππ-+=+⨯⨯⨯⨯⨯⨯=⨯⨯⨯=⨯g相对不确定度:111.6311J J ∆===35663910-⨯()()11358272111.63115663910 5.555256089109.06149285110110J J J kg m kg m J ----∆∆==⨯⨯⨯=⨯≈⨯g g ()721556110J kg m -∴=±⨯g2.大钢球对其自身中心轴的转动惯量J 大为:()555210 5.55525608910 4.53244880910 1.022*******J J J kg m ---=-=⨯-⨯=⨯g 大()772=1.185******** 1.210J kg m --∆==⨯≈⨯g 大()72102.3 1.210J kg m -∴=±⨯g 大大钢球对其自身中心轴的转动惯量的理论值()223362112229.87666667110.6910109.880357774105252tD J M kg m ---⎛⎫⎛⎫==⨯⨯⨯⨯=⨯ ⎪ ⎪⎝⎭⎝⎭g 大则测得的大钢球对其自身中心轴的转动惯量与计算得的理论值的相对误差为:560000161.022********.88035777410 3.519255415 3.6%59.88035777410ttJ J J η----⨯-⨯===⨯大大大=<3.用三线摆验证平行轴定理:三个小钢球和下圆盘对于中心轴OO ’的转动惯量为:()()()()0222222-3-3-322-3523475.10331.85109.8034.191014.6210 1.3877343754437.42109.32251650810m M gRr J T H kg m ππ-+=+⨯⨯⨯⨯⨯⨯⨯=⨯⨯⨯=⨯g相对不确定度:221.58J J ∆===3317571910-⨯()2235772221.583175719109.32251650810 1.47591817810 1.510J J J kg m J ----∆∆==⨯⨯⨯=⨯≈⨯g ()722932.2 1.510J kg m -∴=±⨯g三个小钢球对于中心轴OO ’的转动惯量为:()5552209.32251650810 4.53244880910 4.79006769910J J J kg m ---=-=⨯-⨯=⨯g 小()772=1.66216423210 1.710J kg m --∆==⨯≈⨯g 小()72479.0 1.710J kg m -∴=±⨯g 小则其中一个小球对于中心轴OO ’的转动惯量为:()5524.79006769910 1.5966892331033J J kg m --⨯===⨯g 小小0()0772=1.66216423210 1.710J J kg m --∆=∆⨯≈⨯g 小小720159.7 1.710J kg m -∴=±⨯g 小()而小球相对于过自身的轴的转动惯量为:22336222219.7366666731.851010 1.240672196105252c D J M ---⎛⎫⎛⎫==⨯⨯⨯⨯=⨯ ⎪ ⎪⎝⎭⎝⎭而()()22-3-3522131.851021.91101.52895319910M Rkg m -=⨯⨯⨯=⨯g ,所以,假设平行轴定理成立,一个小球对于中心轴OO ’的转动惯量的理论值为:()2655221 1.24067219610 1.52895319910 1.65302041810c J M R kg m ---+=⨯+⨯=⨯g则一个小球对于中心轴OO ’的转动惯量的测量相对误差为:25521000022521 1.65302041810 1.59668923310 3.40777309151.65302041810c c J M R J J M R η---+-⨯-⨯===+⨯小0<在测量误差允许范围内。
因此通过实验验证得出结论:平行轴定理成立。
4.用扭摆测定三爪盘的转动惯量和切变模量:由()20012202211128T J J T T m J D D ⎧=⎪⎪-⎨⎪=+⎪⎩知,(1)加大环时,大环对悬线的转动惯量为:()()()()()2211113223342899.501072.201083.981081.52551912510m J d d kg m ----=+⨯=⨯⨯+⨯=⨯g 外内1131.51638621710J J -∆===⨯()1134772111.51638621710 1.525519125102.31327617510 2.310J J J kg m J ----∆∆==⨯⨯⨯=⨯≈⨯g 5211525.5 2.310J kg m -∴=±⨯g ()则测出的三爪盘的转动惯量为:()2240011222210521.021475 1.525519125102.116391667 1.0214754.63294973210T J J T T kg m --==⨯⨯--=⨯g ()()()()2210221022102222102210221022102.116391667 1.021475 3.4357025131.T T T T T T T T T T T T T T ----=-=∆=-∆∴∆=-=-==Q ()332468758330610 1.510s --⨯≈⨯010131.69013470410J J -∆===⨯()010*********==1.69013470410 4.63294973210=7.83030912410J J J kg m J ---∆∴∆⨯⨯⨯⨯g ()82014632.97.810J kg m -∴=±⨯g又因为241220432Gd K J T T Lππ==-,所以切变模量()()()()11224103442231012128128323.5210 1.525519125102.1163916671.0214750.514166666108.26508664410LG J T T dkg m s ππ-----=-⨯⨯=⨯⨯-⨯⨯=⨯g g11111G G G G G ∆∆=1010991218.265086644100.0895788.26508664410810(82.78)10G kg m s --⨯⨯=⨯⨯=⨯∴=±⨯g g(2)加小环时,小环对悬线的转动惯量为:()()()()()22123223352860.321063.961071.561086.94563326110m J d d kg m ----=+⨯=⨯⨯+⨯=⨯g 2外2内则测出的三爪盘的转动惯量为:()225520022222220 1.021475 6.94563326110 4.668535228101.611133333 1.021475T J J kg m T T --==⨯⨯=⨯--g 又因为241220432Gd K J T T Lππ==-,所以切变模量()()()()22224203542231012128128323.5210 6.945633261101.611133333 1.0214750.514166666108.32857043310LG J T T dkg m s ππ-----=-⨯⨯=⨯⨯-⨯⨯=⨯g g在本实验中,约定小环测出的值作为理论值,以此计算大环测出的值的相对误差。