高精度定位系统方案V1.0
- 格式:ppt
- 大小:2.12 MB
- 文档页数:22
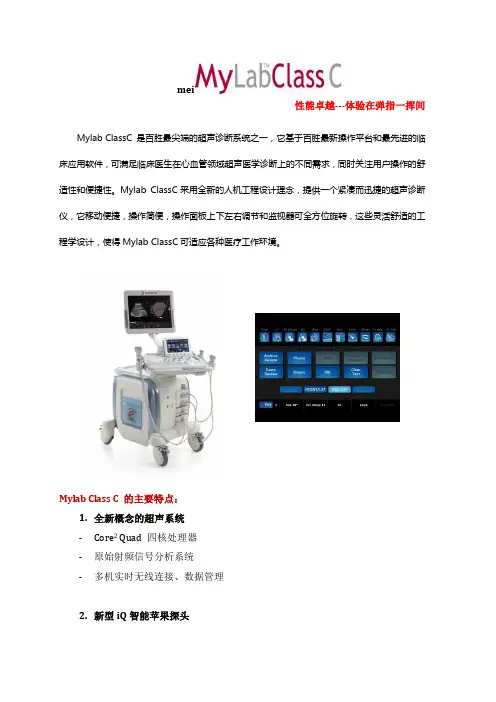
mei性能卓越---体验在弹指一挥间Mylab ClassC 是百胜最尖端的超声诊断系统之一,它基于百胜最新操作平台和最先进的临床应用软件,可满足临床医生在心血管领域超声医学诊断上的不同需求,同时关注用户操作的舒适性和便捷性。
Mylab ClassC采用全新的人机工程设计理念,提供一个紧凑而迅捷的超声诊断仪,它移动便捷,操作简便,操作面板上下左右调节和监视器可全方位旋转,这些灵活舒适的工程学设计,使得Mylab ClassC可适应各种医疗工作环境。
Mylab Class C 的主要特点:1.全新概念的超声系统-Core2 Quad 四核处理器-原始射频信号分析系统-多机实时无线连接、数据管理2.新型iQ智能苹果探头-有源面阵技术---提高图像线密度(分辨率),提高信噪比(动态范围),提高成像速度(帧频)-有源芯片集成---提高数据传输效率-晶片结构填充---降低噪音,提高信噪比-声学几何透镜---提高侧向空间分辨力-苹果外形设计---减轻指腕关节劳损3.多种成像技术成就高性能-X-VIEW丽影成像技术:全程智能斑点噪声自动去除,包括智能声束调整、信号斑点噪声抑制、像素优化调整等多种提升成像质量的技术。
-M-VIEW 多角度空间复合成像:允许用户同时调整复合线数及声束角度。
线数调整可调节图像细节显示;声束角度调整可调节空间伪像抑制水平,使边界显示更清晰。
-PBI 钻石成像技术:能够实时扩展和优化灰阶显示,使图像透亮清晰。
-HD-CFM 高清血流成像:在彩色血流成像时,应用双多普勒技术,提高血流信号的敏感性及空间分辨力。
特别提升低速血流的显示能力及减少血流信号的外溢。
4.应用领域展示多功能:-QIMT血管内中膜精准测量技术: 利用原始射频RF信号高精度、自动测量血管内中膜,连续测量六个心动周期内、一定长度取样范围内的内中膜平均值。
-QAS血管特性测量技术:利用原始射频RF信号,在实时B模式下,自动测量血管脉搏波传导速度(PWV), 获得血管顺应性、扩张系数、弹性系数,血管内膜僵硬度和局部血压等多个参数。
中国移动通信企业标准018-2010中国移动高精度时间同步设备技术规范版本号:1.0.02011-4-8发布2011-4-8实施中国移动通信集团公司发布目录前言 ................................................... 错误!未指定书签。
1. 范围.................................................... 错误!未指定书签。
2. 规范性引用文件.......................................... 错误!未指定书签。
3. 符号和缩略语............................................ 错误!未指定书签。
4. 高精度时间同步设备定义及构成............................ 错误!未指定书签。
4.1. 定义.............................................. 错误!未指定书签。
4.2. 构成.............................................. 错误!未指定书签。
5. 高精度时间同步设备的功能要求............................ 错误!未指定书签。
5.1. 定时输入功能...................................... 错误!未指定书签。
5.1.1. 时间同步输入基本要求........................ 错误!未指定书签。
5.1.2. 卫星定位系统接收机.......................... 错误!未指定书签。
5.1.3. 地面时间输入................................ 错误!未指定书签。
5.1.4. 频率输入(可选)............................ 错误!未指定书签。
Hemisphere系列北斗/GNSS高精度定位板卡P207用户手册V1.0北京合众思壮科技股份有限公司Beijing UniStrong Science & Technology Co.Ltd.目录第一章接收机综述 (1)1.1 产品概述 (1)1.2 产品主要特点 (1)1.3技术规格 (2)第二章硬件组成 (4)2.1机械尺寸 (4)2.2管脚定义 (5)2.3接口信号 (6)2.3.1RF输入 (6)2.3.2 串口 (6)2.3.3 USB口 (6)2.3.4 LED指示灯 (7)2.3.5 1PPS时间信号 (8)2.3.6事件标识输入 (8)第三章连接与设置 (9)3.1 加电启动 (9)3.2设置接收机数据输出 (9)3.2.1 THIS 端口和OTHER 端口 (10)3.2.2 保存当前配置 (11)3.3配置端口D接收RTCM信息(信标或L-BAND功能) (11)第四章常用设置指令说明 (12)4.1 NMEA 0183消息结构 (12)4.2 常用操作指令 (13)4.2.1 $JI (14)4.2.2 $JK (14)4.2.2 $JK,SHOW (15)4.2.3 $JPOS (15)4.2.4 $JBOOT (16)4.2.5 $JRESET (16)4.2.6 $JSA VE (17)4.2.7 $JSHOW (17)4.2.8 $JT (18)4.2.9 $JAPP (19)4.2.10 $JBAUD (20)4.2.11 $JDIFF (20)4.2.12 $JPPS,WIDTH (21)4.2.13 $JPPS,FREQ (21)4.3 GNSS指令 (21)4.3.1 $JASC (22)4.3.2 $JAGE (22)4.3.3 $JOFF (22)4.3.4 $JMASK (23)4.3.5 $JNP&$JNMEA,PRECISION (23)4.3.7 $JSMOOTH (24)4.4 RTK基准站和流动站设置 (24)4.5数据消息 (26)4.5.1 GPGGA (26)4.5.2 GPGLL (27)4.5.3 GSA (28)4.5.4 GPGST (29)4.5.5 GSV (30)4.5.6 GPRMC (31)4.5.7 GPRRE (32)4.5.8 GPVTG (33)4.5.9 GPZDA (33)第五章二进制消息 (35)5.1 二进制消息类型 (35)5.1 二进制消息结构 (36)5.1.1 BIN1消息 (36)5.1.2 BIN2消息 (38)5.1.3 BIN62消息 (39)5.1.4 BIN65消息 (39)5.1.5 BIN66消息 (40)5.1.6BIN69消息 (41)5.1.7 BIN76消息 (42)5.1.8 BIN80消息 (45)5.1.9 BIN93消息 (45)5.1.10BIN94消息 (46)5.1.11 BIN95消息 (47)5.1.12 BIN96消息 (48)5.1.13 BIN97消息 (49)5.1.14 BIN98消息 (50)5.1.15 BIN99消息 (51)第一章接收机综述1.1 产品概述Hemisphere系列P207是一款高性能的BDS/GPS/GLONASS三星单频定位接收机,通过接收SBAS或外部差分信号,可以提供亚米级定位精度,且数据输出速率可高达20Hz。
文档控制变更记录版本号日期简单描述V1.0 20200630 创建目录1产品概述 (1)2参数配置 (2)3TWR通信协议 (2)3.1定位帧基本结构 (2)3.1.1Frame Control (3)3.1.2Sequence Number (4)3.1.3PAN ID (4)3.1.4Destination Address (4)3.1.5Source Address (4)3.1.6FCS (4)3.1.7Ranging Message (4)4串口通信协议 (5)5TWR测距流程 (7)6操作配置流程 (7)1产品概述HR-RTLS3采用Arduino作为主控平台,使用Decawave公司的DWM1000模块作为UWB功能模块,组成4基站1标签的典型高精度定位系统。
该系统设计开源,提供给用户嵌入式源码、硬件原理图、上位机软件源码、视频教程等资料,方便用户迅速掌握UWB定位原理并迅速入门。
系统由5台ULM3基站标签一体化模块组成,ULM3参数如下:表1-1 ULM3模块参数项目参数模块型号ULM3电源DC5V(USB)测距距离50米主控MCU ESP32开发语言/环境Arduino模块尺寸40*25mm测距精度10CM工作温度-20-80℃组成的系统HR-RTLS3定位系统参数如下:表1-2 HR-RTLS3系统参数项目参数系统型号HR-RTLS3静态定位精度5CM CEP95动态定位精度10CM CEP95开发语言/环境Arduino系统配置4基站+1标签定位模式TWR定位范围40*40米2参数配置图2-1 拨码开关示意图4位拨码开关适用于RTLS定位程序的基站和标签的配置,系统支持4基站1标签,完成三维定位的最小系统,第一位表示当前设备角色,为ON则是基站为OFF则是标签,后三位拨码表示当前设备地址。
3TWR通信协议3.1定位帧基本结构该定位帧遵循IEEE 802.15.4协议。
IEEE 802.15.4描述了低速率无线个人局域网的物理层和媒体接入控制协议。
GPS车辆监控系统(标准版) V1.0用户使用说明书目录目录 (2)关于本手册 (5)1.引言 (5)1.1.编写目的 (6)1.2.背景 (6)1.3.术语和缩写 (6)2.系统概述 (6)2.1.系统菜单概述 (6)3.安装 (8)3.1.运行环境 (9)3.1.1.硬件需求 (9)3.1.2.支持软件 (9)3.2.安装过程 (9)4.操作说明 (13)4.1.功能操作说明 (13)4.1.1.系统登录 (13)4.1.2.权限控制 (14)4.1.3.锁定 (14)4.1.4.注销 (15)4.1.5.退出 (15)4.1.6.同步基本资料 (16)4.1.7.连接通讯服务器 (16)4.1.8.系统配置 (16)4.1.9.地图操作 (21)4.1.10.回传设置 (25)4.1.11.断开油路 (27)4.1.12.恢复油路 (27)4.1.13.主动监听 (28)4.1.14.解除报警 (28)4.1.15.终端设置 (29)4.1.16.车辆跟踪 (30)4.1.17.车辆实时状态 (31)4.1.18.指令发送状态 (32)4.1.19.发出短语数据 (32)4.1.20.收到短语数据 (32)4.1.21.车辆报警数据 (32)4.1.23.电子围栏 (33)4.1.24.搜索车辆 (35)4.1.25.范围查车 (36)4.1.26.车辆报警 (37)4.1.27.车辆处警 (38)4.1.28.信息发送 (41)4.1.29.历史信息 (42)4.1.30.车辆信息 (46)4.1.31.轨迹回放 (48)4.1.32.车辆巡检 (50)4.1.33.车辆里程统计 (50)4.1.34.插件管理 (51)4.1.35.单次定位 (52)4.1.36.电子围栏设置查询 (52)4.1.37.计划指令设置 (53)4.1.38.计划运行日志查询 (58)4.1.39.操作日志查询 (59)4.1.40.登录WebGPS (60)4.1.41.报表查看 (60)4.2.贷款功能操作说明............................................................................. 错误!未定义书签。

华为技术有限公司深圳市龙岗区坂田华为基地电话: (0755) 28780808邮编: 518129免责声明本文档可能含有预测信息,包括但不限于有关未来的财务、运营、产品系列、新技术等信息。
由于实践中存在很多不确定因素,可能导致实际结果与预测信息有很大的差别。
因此,本文档信息仅供参考,不构成任何要约或承诺。
华为可能不经通知修改上述信息,恕不另行通知。
版权所有 © 华为技术有限公司 2020。
保留一切权利。
华为路侧自治感知系统提供高集成度,高准确度,高精度,低时延联接的能力,可以解决单车视觉盲区,匝道会车事故频发,全场景感知等单车智能发展的瓶颈问题。
全息感知 全域联接全息目标识别定位 分米级精度(50cm ) 目标识别率95% 轨迹准确率95%LTE/5G-V2X 通信 通信时延<=10ms 5G 通信通信时延<=5ms预集成、模块化、智能化一体化站点1839覆盖3.7km 开放道路101314太湖国际博览中心11超速预警红绿灯推送不按车道行驶交通事故提醒车内标牌闯红灯预警本车换道碰撞预警他车换道碰撞预警2车速引导4施工提醒6超视距路况5交叉路口碰撞预警715161718展区道路限行提醒拥堵提醒12紧急制动预警电单车出没预警行人出没预警前方碰撞预警全球首个城市级车路协同重大项目,首个工信部国家级车联网先导区丰富的智慧出行应用场景:华为车路协同解决方案,聚焦城市“车路网云图”协同端到端解决方案建设,构建“全息感知、全域联接、全局智能、云边协同”的车路协同解决方案,突显“智慧的路、聪明的车、轻松的人”业务价值,实现端到端全场景整体方案设计。
华为车路协同解决方案架构图华为车路协同解决方案。
车载信息终端使用手册北斗之星BD910A (2013.03.01)一、产品介绍:BD910E是2013年最新推出的车载信息终端,其采用北斗+GPS双系统混合定位,目前最佳状态可以同时接收22颗卫星的定位数据(GPS12颗,北斗10颗),定位速度快,精度高,漂移小。
BD910A 延承R910E的软硬件架构,稳定可靠;产品售后不良率低于千分之一!采用优化的高压电源方案(耐瞬间高压100V以上),加强了可靠性设计,提高抗干扰能力,能够稳定地在各类大型货车上使用。
BD910A采用最新的GPRS通信模块设计,弱信号情况下仍然能够可靠在线,在线能力优异;采用终端自主的基站定位解决方案,不需要平台支持即可获得便捷的小区定位数据(通过基站数据连接GOOGLE服务器获得经纬度数据,不需要用户服务器支持),在车库、地下室、GPS天线损坏时仍可获得较为精确的定位结果。
(测试见最后页“基站定位测试方法”);具有GOOGLE短信网址查询功能,通过短信链接使用智能手机上网即可查询位置。
方法见最后页。
产品采用全新的硬件接口设计,内置自锁自弹式SIM卡安装方式,使用更安全、方便;终端采用独立里程统计处理器,精确度99%以上。
采用华强HQ标准协议(天琴、天禾等),支持国内大部分主流监控平台。
产品主要功能:1,定位跟踪,具有秒级定位能力,最短上报间隔为10秒。
2,油/电控制功能;3,紧急报警功能;4,断电报警;5,电子围栏;6,超速报警;7,里程统计;8,远程监听;9,中文位置信息查询。
支持平台控制:立即定位、上报频率调整、取消报警、状态查询、轨迹回放、超速报警、电子围栏、油路控制等;支持平台短信指令控制(平台支持数据短信息指令发送);支持域名拨号、里程统计等。
二、技术参数:2.1 通讯模块:GSM/GPRS模块2.2 定位模块:采用高灵敏S I R F3G P S模块2.3 整机参数体积:65m m X60m m x35m m内置电池:3.7V/500mA电池使用时间:3 小时以上存储温度:-20℃—60℃支持短信息、UDP/TCP数据传输外供电:直流9V—60V三、产品展示四、接口说明:五、基本配置:主机、电源线、输入检测线、报警按键、GPS天线、GSM天线、Mic、继电器组件、合格证。

KJ681人员定位系统安装调试说明书上海山源电子电气科技发展有限公司KJ681人员定位系统说明书V1.0一、硬件准备 (1)1. KT154-F5无线基站人员定位部分(RFID)配置 (1)1.1安装配置管理软件 (1)1.2 配置IP和485串口 (2)1.3虚拟串口配置 (4)1.4读卡分站功能测试 (5)2. KT154-F5接线要求和注意事项 (8)2.1 3105c交换机接法检查 (8)2.2 读卡器板接线检查 (9)2.3 读卡分站和信号转换器接线说明 (9)3. 迈威交换机常见问题 (10)3.1 RFID 网络通信正常,485无法通信 (10)二、软件安装 (10)1. 安装系统 (10)2. 安装VC6和VS6SP3升级包 (11)3. 安装数据库SQL Server 2005 (12)3.1 准备工作:组件IIS的安装 (12)3.3 数据库配置 (28)3.4 配置ODBC数据源 (35)四、TOPMAP地图信息软件的安装 (42)五、KJ681人员定位软件使用 (42)1. 矿图的制作 (42)1.1地图的来源 (42)1.2 地图上十字交叉路口的处理 (42)1.3图纸检查 (43)1.4放置分站标志 (44)2 .KJ681软件的配置 (45)2.1 硬件配置 (45)2.2 分站配置 (49)2.3定位卡设备管理 (50)2.4人员管理(人员发定位卡) (51)3 人员定位软件的使用 (54)KJ681人员定位系统说明书V1.0 一、硬件准备KJ681人员定位系统硬件包括:KT154-F5无线基站、KJ681-F读卡分站、KJ681-K人员定位卡等。
1. KT154-F5无线基站人员定位部分(RFID)配置人员定位部分配置IP: 168.168.185.XXXCOM1:接读卡分站和无线基站内读卡器。
波特率4800。
COM2:预留。
如下图所示。
端口号工作方式端口波特率数据位停止位校验COM1 TCP_Server 18000 4800 8 1 无COM2 TCP_Server 19000 2400 8 1 无1.1安装配置管理软件将迈威3105V交换机附带光盘放入光驱中,安装MOWESTAR View V4上位机网管软和安装虚拟产口软件。
智慧园区AI布控解决方案第1页修订记录第2页总体概述 (4)建设背景 (4)总体目标 (4)设计原则 (4)设计依据 (6)需求分析 (6)需求分析 (7)详细设计 (8)设计思路 (8)总体构架 (8)系统功能 (9)核心产品 (10)安装要求............................................................. 错误!未定义书签。
管理平台 .............................................................. 错误!未定义书签。
系统概述............................................................. 错误!未定义书签。
系统功能............................................................. 错误!未定义书签。
第3页总体概述建设背景随着城市的发展,越来越多的大型园区进驻各大城市人口复杂的核心区域,新型园区逐渐向开元、多元化转型,其人员密集程度和复杂程度远超传统企业园区,导致传统简单的人工式出入口人员管理已无法满足新建园区及老园区改造的需求。
总体目标该系统支持园区来访人员快速登记、人脸授权快速下发前端设备,实现访客快速授权通行及管理。
该系统需支持前端摄像机及门禁、人闸人脸抓拍、人脸检测识别、人脸抓拍图片存储和上传等功能,支持1:N人脸比对,能够满足园区内部人员快速通行及外来陌生人/黑名单人员入侵报警。
系统可将前端录入视频及图片存储为结构化数据,案件发生后可通过人脸、人体、机动车、非机动车等特征数据进行快速检索,生成行动轨迹,为运营者提供快速查案手段。
设计原则➢实用原则以满足实际应用需求为原则,坚持先进,兼容传统,实现系统集成、系统互联、资源整合与信息共享。
把实用性放在第一位,边建设边应用,把系统建设成“实用工程”。
移动电子巡更系统技术方案目录1. 项目背景 (2)2. 项目概述 (2)3. 总体设计 (2)3.1. 设计原则 (2)3.2. 技术架构和技术体系 (3)3.2.1. 面向服务的SOA架构 (3)3.2.2. 信息采集技术 (4)3.2.3. 基于XML的数据交换引擎 (5)3.2.4. 工作流技术 (5)3.2.5. 中间件 (6)3.2.6. GPS (8)3.2.7. Gis (8)3.3. 系统性能设计 (8)3.3.1. 系统安全性设计 (8)3.3.2. 系统可靠性设计 (9)4. 系统功能设计 (10)4.1. 移动电子巡更管理系统 (10)4.2. 移动终端导览 (11)4.3. 后台管理系统 (11)5. 售后服务方案 (12)5.1. 售后服务和技术支持的目标 (12)5.2. 售后服务范围 (13)5.3. 售后服务原则 (13)5.4. 售后服务期 (13)5.5. 响应时间 (14)5.6. 例行检查方式 (14)5.7. 售后服务的程序 (15)1.项目背景在各个旅游景点、旅游风景区都有景区的重点地区安全巡查及日常设备维护的巡查工作,以确保景区的治安、游人及设备的安全。
电子巡更的应用对景区的安全性、可靠性是具有双重的意义。
可以及时制止治安及火灾隐患或对设备的安全运行检查,提高了巡查工作的质量。
如果出现紧急情况,巡查人员可及时解决现场出现的紧急情况。
2.项目概述该系统主要是针对景区巡逻、巡更的管理系统。
根据巡更方案,收集各个景点的地理位置。
景区管理人员通过巡更管理系统设定巡更路线和计划时间表后,由巡更人员携带有移动电子巡更系统的移动终端在景区内进行巡更,在巡更过程中发生交通事故、破坏公物、游客伤亡斗殴等事件时,巡更人员可通过移动终端记录现场的详细信息,采集事故发生的地理位置、现场情况照片或视频等。
将事件信息和坐标上报到管理中心,生成事件跟踪。
管理人员根据事件情况及时处理。
北京伟景智能科技有限公司Mark标识点定位跟踪系统产品说明书文件名称:Mark标识点定位跟踪系统产品说明书文件编号:VIZUM/ZD-MRT(201910)-V1.0生效日期:发布日期起文件页数:24页发文类型:用户手册版本号/修订日期:001/20191025发送部门:市场部发布日期:2019年10月25日目录一、产品概述 (1)1.1产品简介 (1)1.2产品用途及适用范围 (1)1.3产品特点 (2)二、产品配件清单及其说明 (3)2.1产品配件清单 (3)2.1.1双目立体相机模块清单 (3)2.1.2工控处理器 (3)2.2产品硬件模块说明 (4)2.3产品硬件系统工作通讯图 (5)三、产品核心部件结构图 (5)3.1立体视觉系统结构图 (5)3.2工控处理器结构图 (7)四、技术特性 (8)4.1主要性能描述 (8)4.2详细参数列表 (8)五、产品安装说明 (10)5.1相机产品安装尺寸图 (10)5.2产品安装流程图 (11)5.3产品硬件安装说明 (11)六、产品操作使用说明 (12)6.1产品工作流程图 (12)6.2软件安装步骤 (12)6.3软件操作步骤说明 (15)七、产品系统对接说明 (22)7.1产品触发工作方式说明 (22)7.1.1网络协议触发 (22)7.1.2界面软触发方式 (22)7.2数据结果输出说明 (22)7.2.1数据结果种类 (22)7.2.2显示方式 (23)7.3系统对接SDK操作说明 (23)八、产品注意事项 (23)8.1特别提示 (23)8.2安全注意事项 (23)8.3产品的保养与维修 (24)一、产品概述1.1产品简介Mark标识点定位跟踪系统采用伟景智能自主研发的软硬件体系,利用双目立体相机对静止或运动的Mark标识点进行立体空间定位跟踪及姿态检测,适用于室内及室外场景,系统具备终端智能、模块化、标识点高速运动检测、大景深检测、易用性、灵活性等特点。