分布式一致性系统算法
- 格式:pdf
- 大小:573.23 KB
- 文档页数:32
PaxosRaft分布式一致性算法原理剖析及其在实战中的应用一、Paxos算法原理剖析Paxos算法是由Leslie Lamport于1989年提出的,它解决了分布式系统中的一致性问题。
Paxos算法通过引入提议者(proposer)、接受者(acceptor)和学习者(learner)三种角色来实现一致性。
基本流程如下:1.提议者向接受者发送提案,接受者可以接受或拒绝提案。
2.如果大多数接受者接受了提案,那么提案被批准。
3.提议者将批准的提案发送给学习者,学习者学习到最新的提案。
二、Paxos算法的实战应用1. 分布式数据库:Paxos算法可以用来保证分布式数据库的一致性。
通过Paxos算法,可以确保多个节点之间在进行数据写入操作时达成一致,从而避免数据的冲突和不一致。
2. 分布式锁:Paxos算法可以用来实现分布式锁的一致性。
通过Paxos算法,可以保证在多个节点之间只有一个节点能够获得锁,从而保证数据的一致性和并发操作的正确性。
3. 分布式文件系统:Paxos算法可以用来实现分布式文件系统的一致性。
通过Paxos算法,可以确保多个节点之间在进行文件写入操作时达成一致,从而避免文件的冲突和不一致。
三、Raft算法原理剖析Raft算法是由Diego Ongaro和John Ousterhout于2024年提出的,它是一种相对于Paxos算法更易理解和实现的一致性算法。
Raft算法将一致性问题分解成了领导选举、日志复制和安全性三个子问题,并通过角色分离和日志复制的方式来解决这些问题。
Raft算法的基本角色包括领导者(leader)、跟随者(follower)和候选者(candidate)。
基本流程如下:1.初始状态下,所有节点都是跟随者。
2.当跟随者接收到来自候选者或领导者的请求时,它会根据一定的规则来更新自己的状态。
3.当跟随者的选举定时器超时时,它会成为候选者,并发起选举。
4.候选者向其他节点发送投票请求,其他节点根据一定的规则来决定是否投票给候选者。
常见的分布式算法分布式算法是一种能够处理大规模分布式系统的算法。
随着云计算和大数据的不断发展,分布式算法也逐渐成为了计算机科学领域的热门研究方向。
本文将介绍几种常见的分布式算法。
1. Paxos算法Paxos算法是一种用于解决分布式一致性问题的经典算法。
它能够确保在一个分布式环境中,多个进程能够达成一致的决策,即使发生网络故障或进程崩溃等异常情况。
Paxos算法被广泛应用于分布式数据库、分布式文件系统等领域。
2. Raft算法Raft算法是一种新兴的分布式一致性算法,它与Paxos算法类似,但更易于理解和实现。
Raft算法的设计目标是使分布式系统的可理解性更高,从而降低系统实现和维护的难度。
因此,Raft算法在近年来得到了广泛的关注和应用。
3. MapReduce算法MapReduce算法是一种用于处理大规模数据的分布式算法。
它通过将大规模数据分解成多个小数据块,并将这些数据块分散到多个计算机节点上进行并行计算,从而实现高效的数据处理。
MapReduce算法被广泛应用于搜索引擎、数据仓库等领域。
4. Gossip算法Gossip算法是一种用于分布式信息传播的算法。
它通过模拟人类社交网络中的信息传播行为,实现分布式节点之间的信息传输和共享。
Gossip算法在分布式系统中具有很高的可扩展性和容错性,因此在云计算、分布式数据库等领域得到了广泛应用。
总之,分布式算法是一种非常重要的计算机科学研究方向,它能够提高分布式系统的可扩展性、可靠性和性能。
通过学习和应用以上几种常见的分布式算法,我们可以更好地理解和应用分布式系统,从而促进分布式计算的发展。
Raft协议介绍Raft整体介绍Raft协议是一种分布式一致性算法,旨在解决分布式系统中的一致性问题。
它于2024年由Stanford大学的Diego Ongaro和John Ousterhout在《USENIX Symposium on Operating Systems Design and Implementation》中发表。
相对于其他一致性算法如Paxos,Raft更易于理解和实现,因此逐渐成为分布式系统领域的重要研究对象。
一致性算法的核心问题是如何在多个节点之间达成一致的共识。
在分布式系统中,由于网络延时、节点故障等原因,不同节点可能会收到不同的命令或产生不同的状态。
因此,分布式系统需要一种协议来确保所有节点最终都能达成一致的状态。
Raft协议的设计目标是将一致性问题分解为几个较小且易于理解的子问题。
Raft将系统中的节点分为三类角色:Leader、Follower和Candidate。
Leader负责处理客户端请求,将结果复制到其他节点;Follower从Leader接收心跳信号,并响应Leader的请求;Candidate用于选举新的Leader。
这种分工明确的角色设计简化了系统的处理逻辑,使得整个协议易于理解和实现。
Raft协议基于一种称为“领导选举”的机制来选举Leader。
当系统启动时,所有节点都是Follower状态。
任何节点都可以在一个随机时间内变成Candidate,发起一次选举。
节点会向其他节点发送选举请求,并等待其他节点的反馈。
如果候选节点收到了大多数节点的赞成票,它就会成为新的Leader。
在选举过程中,每个节点会加入一个随机的等待时间以避免产生竞争,以此减少选举冲突。
一旦选举出Leader节点,它会负责处理客户端的请求,并将结果复制到其他节点。
Leader会定期发送心跳信号给Follower节点,以保持心跳信号。
如果Follower在一定时间内没有收到心跳信号,它会认为当前Leader已经失效,并开始一个新的选举过程。
分布式一致性算法在计算机系统中,分布式一致性是指在分布式系统的多个节点上保持数据或计算结果的一致性。
由于分布式系统中节点的不稳定性和网络的不可靠性,实现分布式一致性变得非常具有挑战性。
为了解决这个问题,人们提出了许多分布式一致性算法。
一致性算法是指通过协调各个节点之间的操作,使得分布式系统中的数据在逻辑上是一致的。
下面将介绍几个常见的分布式一致性算法。
1.基于主从复制的一致性算法:这种算法中有一个主节点和多个从节点。
主节点负责处理写操作,并将结果传播给从节点进行更新。
当有读操作时,客户端可以从主节点或者从节点读取数据。
这种算法的优点是简单直接,但是主节点的单点故障可能导致整个系统不可用。
2. 基于Paxos算法的一致性算法:Paxos算法是一种分布式一致性算法,主要用于解决一致性协议的问题。
它通过选择一个决策提案并将其传播给其他节点来实现一致性。
Paxos算法具有高效、可扩展和容错性强的特点,可以在分布式系统中实现一致性。
3. 基于Raft算法的一致性算法:Raft算法是一种相对较新的分布式一致性算法,与Paxos算法类似,它也可以用于解决一致性协议的问题。
Raft算法将分布式系统分为多个节点,其中有一个领导者节点和多个跟随者节点。
领导者节点负责接收来自客户端的操作,并将其进行复制和传播给其他节点。
如果领导者节点故障,其他节点将通过选举新的领导者节点来维持一致性。
4.基于链式复制的一致性算法:这种算法中,多个节点以链条形式连接起来,每个节点负责将接收到的操作复制给下一个节点。
当链中的节点都接收到相同的操作后,一致性就得以实现。
这种算法的优点是简单可靠,但是链中的节点过多可能导致延迟增加。
总结来说,分布式一致性算法在保持系统一致性的过程中会面临节点故障、网络故障和并发操作等问题。
不同的算法适用于不同的场景,需要根据具体的应用需求来选择合适的一致性算法。
为了提高系统的可靠性和性能,还可以通过增加冗余节点、优化网络通信和增加并发处理能力等手段来改善分布式一致性。
分布式⼀致性算法Paxos、Raft、Zab的区别与联系什么是分布式系统?拿⼀个最简单的例⼦,就⽐如说我们的图书管理系统。
之前的系统包含了所有的功能,⽐如⽤户注册登录、管理员功能、图书借阅管理等。
这叫做集中式系统。
也就是⼀个⼈⼲了好⼏件事。
后来随着功能的增多,⽤户量也越来越⼤。
集中式系统维护太⿇烦,拓展性也不好。
于是就考虑着把这些功能分开。
通俗的理解就是原本需要⼀个⼈⼲的事,现在分给n个⼈⼲,各⾃⼲各⾃的,最终取得和⼀个⼈⼲的效果⼀样。
稍微正规⼀点的定义就是:⼀个业务分拆多个⼦业务,部署在不同的服务器上。
然后通过⼀定的通信协议,能够让这些⼦业务之间相互通信。
既然分给了n个⼈,那就涉及到这些⼈的沟通交流协作问题。
想要去解决这些问题,就需要先聊聊分布式系统中的CAP理论。
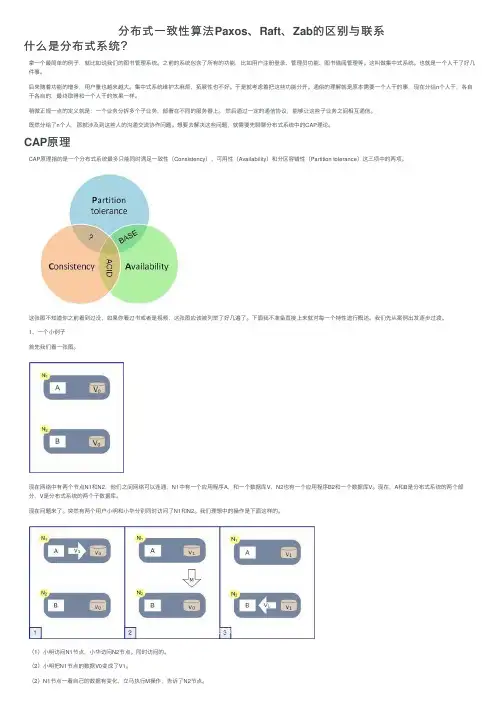
CAP原理CAP原理指的是⼀个分布式系统最多只能同时满⾜⼀致性(Consistency)、可⽤性(Availability)和分区容错性(Partition tolerance)这三项中的两项。
这张图不知道你之前看到过没,如果你看过书或者是视频,这张图应该被列举了好⼏遍了。
下⾯我不准备直接上来就对每⼀个特性进⾏概述。
我们先从案例出发逐步过渡。
1、⼀个⼩例⼦⾸先我们看⼀张图。
现在⽹络中有两个节点N1和N2,他们之间⽹络可以连通,N1中有⼀个应⽤程序A,和⼀个数据库V,N2也有⼀个应⽤程序B2和⼀个数据库V。
现在,A和B是分布式系统的两个部分,V是分布式系统的两个⼦数据库。
现在问题来了。
突然有两个⽤户⼩明和⼩华分别同时访问了N1和N2。
我们理想中的操作是下⾯这样的。
(1)⼩明访问N1节点,⼩华访问N2节点。
同时访问的。
(2)⼩明把N1节点的数据V0变成了V1。
(2)N1节点⼀看⾃⼰的数据有变化,⽴马执⾏M操作,告诉了N2节点。
(4)⼩华读取到的就是最新的数据。
也是正确的数据。
上⾯这是⼀种最理想的情景。
它满⾜了CAP理论的三个特性。
现在我们看看如何来理解满⾜的这三个特性。
paxos算法原理Paxos算法原理Paxos算法是一种分布式一致性算法,用于解决分布式系统中的数据一致性问题。
它是由Leslie Lamport在1990年提出的,被广泛应用于分布式数据库、分布式文件系统、分布式缓存等领域。
Paxos算法的核心思想是通过多个节点之间的协商来达成一致。
在Paxos算法中,有三种角色:Proposer、Acceptor和Learner。
Proposer提出一个提案,Acceptor接受或拒绝该提案,Learner学习已经达成的一致结果。
Paxos算法的流程如下:1. Proposer向Acceptor提出一个提案,包括提案编号和提案内容。
2. Acceptor接受提案,如果Acceptor没有接受过编号更大的提案,则接受该提案,并向所有Learner广播该提案。
3. Learner接收到提案后,如果接收到的提案编号比之前接收到的提案编号更大,则更新自己的提案内容。
4. 如果Proposer没有收到Acceptor的回复,则重新发送提案。
5. 如果Acceptor接受了一个提案,但是Proposer没有收到足够多的回复,则重新发送提案。
6. 如果Proposer收到了足够多的回复,则该提案被接受,并广播给所有Learner。
7. 如果Learner接收到的提案编号相同,则认为已经达成一致。
Paxos算法的优点是能够保证分布式系统中的数据一致性,即使在节点故障或网络分区的情况下也能够达成一致。
但是Paxos算法的缺点是实现复杂,需要处理很多细节问题,而且在网络延迟较大的情况下,算法的性能会受到影响。
Paxos算法是一种非常重要的分布式一致性算法,它为分布式系统的可靠性提供了保障。
在实际应用中,我们需要根据具体的场景选择合适的一致性算法,以达到最优的性能和可靠性。
理解分布式系统中的Paxos算法和Raft算法分布式系统中的Paxos算法和Raft算法是两种常用的一致性算法,用于处理分布式系统中节点之间的数据一致性问题。
本文将介绍这两种算法的原理和特点。
一、Paxos算法Paxos算法是由Leslie Lamport提出的一种一致性算法,被广泛应用于分布式系统中。
Paxos算法通过选举一个主节点(称为领导者)来协调分布式系统中各个节点的操作。
Paxos算法分为三个阶段:准备阶段、提议阶段和批准阶段。
在准备阶段,节点向其他节点发送准备请求,并等待其他节点回复。
当收到大多数节点的回复后,节点可以进入提议阶段。
在提议阶段,领导者向其他节点发送提议请求,并等待其他节点回复。
当收到大多数节点的回复后,领导者可以进入批准阶段。
在批准阶段,领导者向其他节点发送批准请求,并等待其他节点回复。
当收到大多数节点的回复后,领导者可以确定最终的提议,并将结果通知给其他节点。
Paxos算法的特点是具有良好的容错性和高可用性。
即使在节点故障或网络分区的情况下,算法仍能保持数据一致性。
二、Raft算法Raft算法是由Diego Ongaro和John Ousterhout提出的一种一致性算法,与Paxos算法相比,Raft算法更易于理解和实现。
Raft算法也是通过选举一个主节点(称为领导者)来协调分布式系统中各个节点的操作。
Raft算法分为三个阶段:选主阶段、日志复制阶段和提交阶段。
在选主阶段,节点通过相互通信来选举领导者。
节点会互相发送投票请求,当某个节点获得多数票时,就成为领导者。
在日志复制阶段,领导者接收客户端的操作请求,并将这些请求追加到自己的日志中。
然后,领导者向其他节点发送日志复制请求,要求它们复制自己的日志。
在提交阶段,领导者等待大多数节点确认复制完成,并将操作结果返回给客户端。
这样,就保证了数据在分布式系统中的一致性。
Raft算法的特点是具有较低的复杂性和良好的可读性。
Paxos算法是一种分布式一致性算法,用于解决分布式系统中的数据一致性问题。
它是由Leslie Lamport在1998年提出的。
Paxos算法保证了在存在故障的情况下,分布式系统中的节点可以达成一致的共识。
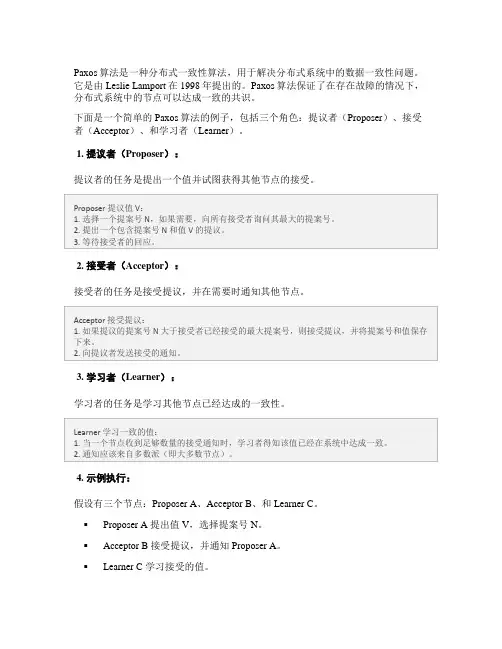
下面是一个简单的Paxos算法的例子,包括三个角色:提议者(Proposer)、接受者(Acceptor)、和学习者(Learner)。
1. 提议者(Proposer):
提议者的任务是提出一个值并试图获得其他节点的接受。
2. 接受者(Acceptor):
接受者的任务是接受提议,并在需要时通知其他节点。
3. 学习者(Learner):
学习者的任务是学习其他节点已经达成的一致性。
4. 示例执行:
假设有三个节点:Proposer A、Acceptor B、和Learner C。
▪Proposer A 提出值 V,选择提案号 N。
▪Acceptor B 接受提议,并通知 Proposer A。
▪Learner C 学习接受的值。
如果节点 B 是多数派(可能有多个 Acceptor),则系统达成一致。
Proposer A 的提案得到了多数派的接受,Learner C 学习到了一致的值。
Paxos算法通过多轮的消息交互确保了在分布式系统中的节点之间达成一致的共识。
这个例子只是一个非常简单的示例,实际中Paxos算法的实现可能涉及更多的细节
和处理机制,包括处理超时、网络分区、恢复等情况。
分布式一致性系统算法分布式一致性系统算法是用于解决分布式系统中数据一致性问题的一类算法。
在分布式系统中,由于多个节点之间的通信可能存在延迟、故障等问题,导致节点之间的数据不一致。
分布式一致性算法致力于解决这些一致性问题,使得系统在分布式环境下能够保持一致的数据状态。
一致性模型是评判分布式一致性算法的重要标准之一、常见的一致性模型包括强一致性、弱一致性、最终一致性等。
强一致性要求系统的任何时刻都保持一致的数据状态,即使存在网络延迟或者节点故障。
而弱一致性和最终一致性则允许系统在特定时刻出现短暂的数据不一致,但最终会达到一致的状态。
下面介绍几种常见的分布式一致性系统算法:1. Paxos算法:Paxos算法是一种经典的分布式一致性算法,最早由Leslie Lamport 提出。
Paxos算法通过使用提案和承诺等概念来确保系统的一致性。
算法包括两个阶段:准备阶段和提交阶段。
在准备阶段,节点通过相互通信来达成共识,选择一个提案进行提交。
在提交阶段,节点将该提案提交给多数节点,从而达到一致的数据状态。
2. Raft算法:Raft算法是一种相对较新的分布式一致性算法,由Diego Ongaro和John Ousterhout提出。
Raft算法通过领导者选举和日志复制等机制来实现一致性。
系统中的节点分为领导者、跟随者和候选人三种角色。
领导者负责接收客户端请求并将其复制到其他节点,跟随者和候选人则负责接收并复制领导者的日志。
3. ZooKeeper算法:ZooKeeper是一个分布式协调服务,其算法也可以用来实现分布式一致性。
ZooKeeper使用ZAB(ZooKeeper Atomic Broadcast)算法来保证数据的一致性。
ZAB算法中包括两个阶段:广播和提交。
在广播阶段,节点将更新操作广播给其他节点;在提交阶段,节点将接收到的更新操作应用到本地状态机中,从而达到一致的数据状态。
除了上述几种算法之外,还有许多其他的分布式一致性算法,如Gossip协议、Chord算法、Scuttlebutt算法等。
raft聚合原理Raft聚合原理是一种在分布式系统中实现一致性的算法。
它是由Diego Ongaro和John Ousterhout在2013年提出的,旨在解决Paxos算法的复杂性和难以理解的问题。
Raft通过将一致性问题分解为几个独立的子问题,并使用领导者选举机制来实现一致性。
Raft算法的核心思想是将分布式系统中的节点划分为三种角色:领导者(leader)、跟随者(follower)和候选人(candidate)。
每个任期开始时,节点首先是跟随者。
如果跟随者在一个任期内没有接收到领导者的心跳消息,它就会成为候选人并开始新的选举。
领导者的主要职责是接收客户端的请求并复制日志条目到其他节点。
它会周期性地向跟随者发送心跳消息以保持其领导地位。
跟随者在接收到来自领导者的心跳消息后,会重置选举超时定时器。
如果选举超时定时器超时了,跟随者将成为候选人并发起新的选举。
候选人的主要职责是发起选举并成为新的领导者。
在一个任期内,只有一个候选人能够成为领导者。
候选人首先会增加自己的任期号,并向其他节点发送请求投票的消息。
其他节点在收到请求投票的消息后,会根据一定的规则决定是否投票给该候选人。
如果候选人收到了大多数节点的投票,它将成为新的领导者。
Raft算法通过领导者选举机制来保证系统的一致性。
选举过程中,每个节点只能投给一个候选人,这样就可以避免多个领导者同时存在的问题。
同时,Raft算法还引入了日志复制机制,确保每个节点都拥有相同的日志序列,从而实现数据的一致性。
Raft算法的聚合原理可以总结为以下几点:1. 领导者选举:通过任期号和选举超时定时器实现领导者的选举,并避免多个领导者同时存在的问题。
2. 日志复制:领导者通过发送心跳消息和日志条目,使得其他节点的日志序列与自己保持一致。
3. 安全性:Raft算法通过多数派原则确保系统的安全性,即只有获得大多数节点的支持才能成为领导者。
通过这些机制,Raft算法能够实现分布式系统的一致性。
paxos算法Paxos算法是一种用于分布式系统中一致性问题的算法,由Leslie Lamport于1990年提出。
该算法是一种基于消息传递的算法,通过多轮的投票和提议来实现分布式系统中的一致性。
Paxos算法由三个角色组成:提议者(proposer)、学习者(learner)和接受者(acceptor)。
在Paxos算法中,提议者的任务是提出一个要在系统中达成一致的值,学习者的任务是学习并接受已经达成一致的值,而接受者则负责对提议进行投票并决定最终达成一致的值。
Paxos算法的核心思想是使用多个提议轮次来逐步达成一致。
算法的执行分为两个阶段:准备阶段(prepare phase)和接受阶段(accept phase)。
在准备阶段中,提议者向所有接受者发送准备请求(prepare request),接受者收到准备请求后会比较该请求中的提议轮次与自己已经接受的最大提议轮次。
如果接收者已经接受了更高轮次的提议,那么它会拒绝该准备请求,如果接收者还没有接受或者接受的提议轮次小于该准备请求的提议轮次,那么它会接受该准备请求并返回它已经接受的最高提议。
在接受阶段中,如果提议者收到了足够多的接受者返回的准备请求,那么它就可以进入提议阶段。
提议者向所有接受者发送提议请求(accept request),该请求包含提议者想要达成一致的值。
接受者在收到提议请求后会比较该请求中的提议轮次与自己已经接受的最大提议轮次以及提议者发送的值是否一致。
如果接受者已经接受了更高轮次的提议或者发送的值与已接受的值不一致,那么它会拒绝该提议请求,否则就接受该提议请求。
通过多个准备和提议阶段的交替执行,最终会达成一致。
Paxos算法能够容忍网络延迟和丢包,因为它保证了只要有足够多的接受者返回准备或提议请求,那么就可以继续执行下一轮的准备或提议。
尽管Paxos算法是一种非常重要的分布式一致性算法,但它也存在一些问题。
首先,Paxos算法的理论描述非常复杂,不容易理解和实现。
分布式系统中的分布式共识算法分布式系统是由多个节点组成的计算机系统,这些节点分布在不同的地理位置并通过网络进行通信。
在分布式系统中,节点之间的一致性是非常重要的,因为节点需要达成共识以实现一致的状态。
为了实现分布式系统中的共识,分布式共识算法被广泛应用。
这些算法旨在确保节点能够就某个值或决策达成一致,即使在存在节点故障或网络不可靠的情况下也能保持一致。
以下将介绍几种常见的分布式共识算法。
一、拜占庭容错算法拜占庭容错算法是一种能够应对拜占庭将军问题的分布式共识算法。
拜占庭将军问题是指在分布式系统中,存在恶意节点发送错误信息以干扰共识过程的情况。
拜占庭容错算法通过使用密钥、签名和消息验证等技术来解决这个问题,确保节点能够正确达成共识。
二、Paxos算法Paxos算法是一种常用的分布式共识算法,它通过多次消息交换和轮次投票的方式来实现共识。
在Paxos算法中,节点分为提议者和接受者两种角色,提议者提出一个值,并通过多次投票逐渐达成共识。
Paxos算法能够容忍节点故障和消息丢失等问题,具有很强的容错性。
三、Raft算法Raft算法是一种相对简单易懂的分布式共识算法,它通过选举、复制日志和安全提交等阶段来实现共识。
与Paxos算法相比,Raft算法的设计更加模块化,容易理解和实现。
它将节点分为领导者、跟随者和候选人三种角色,通过选举机制确保系统中只有一个领导者,并且保证领导者的日志会被正确复制和提交。
四、Bitcoin共识算法Bitcoin共识算法也被称为工作量证明(Proof of Work,PoW)算法,它是比特币网络中使用的一种分布式共识算法。
在Bitcoin共识算法中,节点通过解决数学难题来进行工作量证明,从而获得产生区块的权利。
其他节点可以通过验证这些区块的有效性来达成共识。
PoW算法被广泛应用于许多区块链系统中。
以上介绍了几种常见的分布式共识算法,它们在不同的场景和应用中有着不同的适用性和性能。
分布式系统中的一致性问题及解决方案研究随着互联网的快速发展和应用范围的扩大,分布式系统已成为现代计算机系统的核心组织形式。
然而,分布式系统的一致性问题一直以来都是研究人员关注的焦点之一。
本文将重点探讨分布式系统中的一致性问题,并介绍几种常用的解决方案。
一、分布式系统中的一致性问题在分布式系统中,由于涉及到多个节点的协作和数据交互,一致性问题变得非常复杂。
下面将详细介绍分布式系统中的一致性问题。
1.1 数据一致性在分布式系统中,数据的一致性是指在任意时刻,所有节点访问到的数据都是一致的。
然而,由于网络延迟、节点宕机和并发访问等原因,数据一致性往往很难得到保障。
例如,在一个分布式存储系统中,如果节点A更新了一份数据,而节点B还未收到更新通知或者更新失败,那么节点B就无法保持与节点A的数据一致。
1.2 时序一致性时序一致性是指在分布式系统中,节点之间的事件先后发生顺序是一致的。
具体来说,对于任意两个事件A和B,如果A在节点X上发生,而B在节点Y上发生,并且A在时间上先于B,那么所有节点都应该能够观察到这种时序的一致性。
1.3 一致性模型一致性模型是指对分布式系统中的一致性问题进行抽象和形式化描述的模型。
常见的一致性模型包括严格一致性、强一致性、弱一致性和最终一致性等等。
不同的一致性模型对系统的性能、可用性和开发难度等方面都有不同的要求。
二、解决分布式系统一致性问题的方法和技术为了解决分布式系统中的一致性问题,研究人员提出了许多方法和技术。
下面将介绍其中几种常用的解决方案。
2.1 分布式共识算法分布式共识算法是一类用于解决分布式系统中一致性问题的算法。
其中最著名的算法之一是拜占庭容错算法(Byzantine Fault Tolerance,简称BFT)。
拜占庭容错算法能够在面对网络故障或恶意攻击等情况下,保证分布式系统的一致性。
2.2 基于版本控制的解决方案基于版本控制的解决方案通过引入版本号来解决一致性问题。
paxos应用场景Paxos应用场景Paxos是一种分布式一致性算法,其主要应用于分布式系统中的数据一致性问题。
在分布式系统中,由于网络延迟、节点故障等原因,不同节点之间的数据副本可能会出现不一致的情况。
为了确保分布式系统的数据一致性,Paxos可以提供一种可靠的解决方案。
一、分布式数据库系统在分布式数据库系统中,数据的一致性是非常重要的。
Paxos可以用来确保不同节点之间的数据库副本的一致性。
当一个节点需要将更新的数据传播给其他节点时,Paxos可以协调各个节点的状态,保证数据的一致性。
通过使用Paxos算法,分布式数据库系统可以实现高可用性和容错性,提供可靠的数据服务。
二、分布式存储系统在分布式存储系统中,数据的一致性同样是一个重要的问题。
Paxos可以用来确保不同节点之间的存储数据的一致性。
当一个节点需要写入数据或者读取数据时,Paxos可以协调各个节点的状态,保证数据的一致性。
通过使用Paxos算法,分布式存储系统可以实现高可用性和数据的可靠性。
三、分布式事务在分布式事务中,各个参与者之间的数据一致性是一个挑战。
Paxos可以用来确保分布式事务的数据一致性。
当一个事务需要在不同节点上执行时,Paxos可以协调各个节点的状态,保证事务的数据一致性。
通过使用Paxos算法,分布式事务可以实现可靠的数据操作。
四、分布式共识在分布式系统中,共识问题是一个重要的挑战。
Paxos可以用来解决分布式系统中的共识问题。
共识问题指的是在一个分布式系统中,各个节点需要就某个提案达成一致意见。
Paxos算法通过提供一个可靠的共识机制,使得分布式系统的各个节点能够达成一致的共识。
总结:Paxos算法是一种用于解决分布式系统中数据一致性问题的算法。
它可以应用于分布式数据库系统、分布式存储系统、分布式事务和分布式共识等场景中。
通过使用Paxos算法,这些分布式系统可以实现高可用性、容错性和可靠的数据操作。
Paxos算法的应用可以保证分布式系统的数据一致性,提高系统的稳定性和可靠性。
分布式一致性算法分布式一致性是指在分布式系统中,多个节点之间对数据达成一致的过程。
由于分布式系统的特性,比如网络延迟、节点故障和节点之间的通信不可靠,使得实现一致性变得非常困难。
因此,设计高效可靠的分布式一致性算法是分布式系统领域的一个重要研究课题。
一致性算法可以分为两类:强一致性算法和弱一致性算法。
强一致性算法要求在任意时刻,系统的所有节点对同一个数据的读操作都能够得到相同的结果,即保证系统的线性一致性。
而弱一致性算法则不要求所有节点在同一时间对数据的读操作结果一致,可以容忍一定的数据不一致性。
一种常见的强一致性算法是Paxos算法。
Paxos算法是由Leslie Lamport在20世纪80年代提出的,被广泛应用于分布式系统中。
Paxos 算法的核心思想是通过选举一个唯一的主节点,所有的写操作都由主节点领导,并将写操作中生成的日志复制到其他节点上。
然后,主节点等待多数节点的确认消息,确认通过后,写操作才算完成。
这样就能保证在任意时刻系统的所有节点对同一个数据的读操作结果一致。
另一种常见的强一致性算法是Raft算法。
Raft算法与Paxos算法类似,也是通过选举一个主节点来实现一致性。
Raft算法的优势在于其更简单易懂的设计,使得其在实际应用中更易于实现和维护。
Raft算法将分布式一致性问题分解为几个简单的子问题,例如选举主节点、日志复制和安全性等,每个子问题都有明确定义的算法解决。
这种模块化的设计使得Raft算法易于理解和实现,并且能够保证系统的一致性。
除了强一致性算法之外,还存在许多弱一致性算法。
例如,最终一致性算法,也被称为基于事件的一致性算法。
最终一致性算法允许系统中的不同节点对同一个数据在不同时间得到不一致的结果,但最终会收敛到一致的状态。
最终一致性算法通常基于向量时钟或逻辑时钟来判断数据的一致性。
这种算法适用于分布式系统中对一致性要求相对较低的场景,如社交网络中的朋友关系和动态消息。
confluence算法Confluence算法是一种用于解决多个网络节点之间信息同步的分布式一致性算法。
它的设计目标是实现高效的数据同步和协作,并确保在网络发生故障或节点失效的情况下,系统仍然能够保持一致性。
我们需要了解什么是分布式一致性。
在分布式系统中,由于网络延迟、节点故障等原因,各个节点上的数据可能会出现不一致的情况。
而分布式一致性就是保证系统中所有节点的数据达到一致的状态。
而Confluence算法就是为了解决这个问题而设计的。
Confluence算法的核心思想是通过协调节点之间的信息同步来达到一致性。
它通过选举一个领导节点来负责协调其他节点的操作,并使用一种基于日志的方法来记录和复制数据。
当有新的操作发生时,节点会将其记录在日志中,并通过领导节点来同步更新其他节点的数据。
这样,即使在网络发生故障或节点失效的情况下,系统也能够通过日志的方式来恢复数据的一致性。
在Confluence算法中,节点之间通过心跳机制来检测其他节点的状态。
当发现某个节点失效时,系统会自动选举新的领导节点来代替。
同时,Confluence算法还使用了多版本并发控制(MVCC)的方法来解决并发冲突的问题,确保数据在多个节点之间的一致性。
Confluence算法还支持分布式事务的处理。
在分布式系统中,事务的处理是非常复杂的,因为涉及到多个节点之间的协调和同步。
而Confluence算法通过提供一种可靠的事务提交和回滚机制来简化分布式事务的处理,并保证系统在故障发生时能够正确地恢复。
总结来说,Confluence算法是一种高效的分布式一致性算法,通过协调节点之间的信息同步和日志复制来实现数据的一致性。
它能够处理网络故障和节点失效的情况,并提供可靠的事务处理机制。
在现代分布式系统中,Confluence算法被广泛应用于各种场景,如分布式数据库、分布式文件系统等。
它为分布式系统的可靠性和性能提供了重要的支持,是构建高可用性系统的重要工具之一。