吉林大学机械设计4-2
- 格式:ppt
- 大小:417.50 KB
- 文档页数:8

第1章机械设计概要1-1机械设计的基本要求一、设计机器的基本要求1.机器功能的要求2.经济性要求3.劳动保护要求4.环境保护要求5.可靠性要求二、设计机械零件的基本要求1.强度要求2.刚度要求3.耐磨性要求4.结构工艺性要求5.减小质量的要求1-2机械设计的一般程序一、明确设计任务二、方案设计三、技术设计1.运动学设计2.动力学设计3.零件设计4.总装配草图设计5.总装配图与零件工作图设计四、编写技术文件1-3机械零件的主要失效形式与设计准则机械零件由于某些原因而丧失工作能力称为失效。
一、机械零件的主要失效形式1.断裂2.过大的变形3.表面破坏二、机械零件的设计准则1.强度准则2.刚度准则3.耐磨性准则4.振动准则1-4机械零件的设计方法与步骤一、机械零件的设计方法1.理论设计2.经验设计3.模型实验设计4.现代设计方法(1)优化设计(2)可靠性设计二、机械零件设计的步骤1-5机械零件设计的基本原则一、选择材料的基本原则1.强度2.刚度3.磨损4.制造工艺性5.材料经济性二、标准化的原则第2章机械零件的强度与耐磨性2-1机械零件的疲劳强度一、机械零件的载荷根据机器的额定功率或负载,按理论力学的方法求出的作用在零件上的载荷称为名义载荷,用符号或表示。
在机械设计过程中,通常用一个修正系数来补偿名义载荷与零件实际载荷之间的差异,这个修正系数称为载荷系数,用符号表示。
名义载荷乘以载荷系数就是设计计算时使用的计算载荷,即。
二、材料的疲劳曲线材料的真实疲劳机械对应的循环次数都比较大,因此工程上规定一个循环基数,而对应的应力就视为材料的疲劳极限。
材料的疲劳曲线公式:三、材料的极限应力图循环极限应力,屈服极限应力。
四、影响机械零件疲劳强度的因素1.应力集中的影响2.尺寸效应的影响3.表面质量的影响综合影响系数用零件的工作应力幅乘以综合影响系数或材料极限应力的幅值除以综合影响系数来考虑上述因素对零件疲劳强度的影响。

----------专业最好文档,专业为你服务,急你所急,供你所需-------------机械设计I 课程设计任务书一.选题(每班由指导教师负责分成七个设计小组,每组在题目中选择一个设计题目,组与组之间题目不得重复。
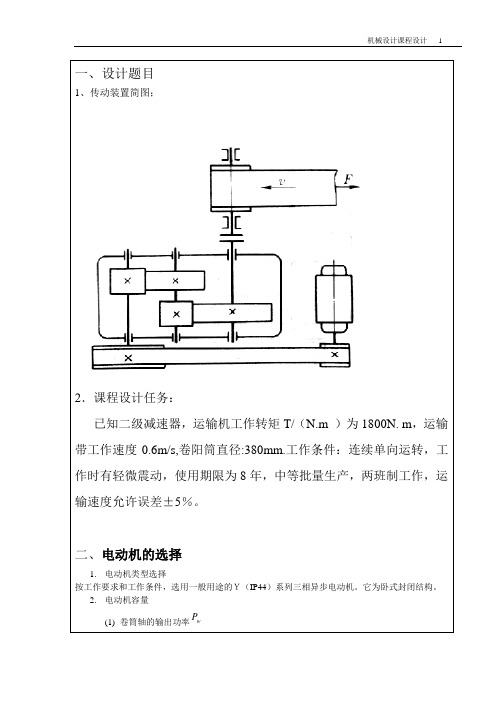
) 例题:设计带式运输机传动装置图1图2已知条件:(1)运输带工作拉力N F 3000=; (2)运输带工作速度s m v 3.2=; (3)滚筒直径mm D 385=; (4)工作机传动效率1=w η;(5)工作情况:两班制,连续单向运转,载荷较平稳;(6)工作环境:室内工作,湿度和粉尘含量为正常状态,环境最高温度为35度;(7)要求齿轮使用寿命为10年(每年按300天计);(8)生产批量:中等;(9)动力来源:电力,三相交流,电压380V。
传动方案:如图1所示。
设计工作量:(1)建立组成减速器的各零件的三维模型及减速器装配模型;(2)减速器装配图1张(A0图纸);(3)零件工作图1张(同一设计小组的各个同学的零件图不得重复,须由指导教师指导选定);(4)设计计算说明书1份(A4)。
(共七个题目,请见附表)----------专业最好文档,专业为你服务,急你所急,供你所需-----------------------专业最好文档,专业为你服务,急你所急,供你所需-------------二.课程设计的步骤(共四部分)1.设计计算:2.用UG 软件构建零件三维模型及装配模型每位同学都要依据自己的设计参数独立建模。
3.绘制典型零件的零件图、绘制装配图。
零件图每人一张,由指导教师分配任务。
4.整理说明书(A4)按指导书78页的要求编写。
注:附图内容包括:零件三维模型图、装配模型图、零件图、装配图、爆炸图三.课程设计进度安排----------专业最好文档,专业为你服务,急你所急,供你所需-------------四.参考资料1.《机械设计课程设计》2.《机械设计》3.《机械设计手册》4.电子版《机械设计手册》5.《机械工程图学》6.UG课件及相关资料7.《几何量公差与检测》8.《工程材料与成型技术》五.课程设计中应注意的问题1.独立思考、严谨认真、精益求精,多与指导教师沟通。

5。
4 培养体系培养对象 5。
4。
1 机械科学与工程学院机械工程及自动化专业大学本科四年级学生。
5.4.2 培养形式培养环节主要包括生产实习、毕业设计(论文)、工程实践实习、学位论文。
采用“本硕连读”的培养模式,前4年主要在校学习课程,后2年在企业实践学习、国际交流培养、做毕业设计和论文. 每年组织学生到合作企业进行生产参观实习;并联合企业共建工程创新实践实验室,解决相关工程实践问题;通过合作企业为毕业设计提供选题来源;采用双导师制,聘请企业工程师到校为学生讲授实际工程需要。
学生的在校培养过程实行校内全程导师制,采取学生选导师和导师选择学生双向选择的方式进行。
项目导师要针对学生的具体情况,制定出培养学生创新能力的详细计划,随时指导学习,并定期进行总结和座谈,建立完善的考核制度。
5。
4.3 实施步骤分层次培养卓越工程师的步骤阶段三年级本科生四年级本科生培养方式理念导入阶段,以认识、了解企业为主,方式为参加由企业举办的专门的讲座、参观企业、以及其他合适的形式。
近距离观察阶段,通过企业提供的研究项目(毕业设计、创新性课题研究),更进一步熟悉企业,同时,企业也可以详细观察学生,在用人与否的判断上有所准备。
5。
4。
4 实施方案 1)挑选合适的学生进入预备卓越工程师计划挑选学生的依据: . 各学期学习成绩 . 外语水平。
奖励情况(包括学习、竞赛)�面试/性格测试预备卓越工程师在升入四年级时可以要求与企业签订就业意向协议,以使他们能够专心于学业. 2)教授、企业专家开展交流探讨 28企业向机械学院老师介绍企业各专业科室负责情况、对人才(培养)的要求等;机械学院老师向企业介绍有关自己的专业领域与方向、人才培养、技术发展等方面的有关信息。
双方通过交流探讨,加深了解各自的意见、设想,取得共同理解,为开展校企合作、为实施“预备卓越工程师联合培养计划"打下良好的基础。
3)组织预备卓越工程师开展生产实习或综合实习,开设具有企业特点的讲座由企业领导、有关部门经理作为主讲人,向预备卓越工程师宣讲企业文化、价值观、社会责任,介绍企业的发展战略、市场定位、营销服务体系、研发体系、质量体系、生产制造体系、平台战略思路等;组织预备卓越工程师参观企业开展生产实习、综合实习等活动.使预备卓越工程师加深对机械行业的热爱、加深对企业的认识,产生对企业品牌的认同,使书本知识与生产实际有机地结合在一起。
附录一基圆最大值clear>> syms x;>> t=0:0.0001:1.047;>> y=sqrt((50.03*sin(3*x)+9.6225*cos(3*x)-20.0125).^2+36); >> f=inline(y);>> max=max(f(t))max =31.5110 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 推程压力角校核clccleare=6;h=19.245;a0=1./3.*pi;r0=32;x=0:0.01:60;a=(x./360).*2.*pi;s=0.5*h.*(1-cos(3*a));s2=1.5*h.*sin(3*a);b=atan((s2-e)./(s+sqrt(r0.^2-e.^2)));c=b./pi.*180;plot(x,c,'r.');grid;xlabel('δ/°')ylabel('α/°')title('压力角曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 回程压力角校核clccleare=6;h=38.49;a0=2./3.*pi;r0=32;x=0:0.01:120;a=(x./360).*2.*pi;s=0.5*h.*(1+cos(1.5*a));s2=-0.75*h.*sin(1.5*a);b=atan((s2+e)./(s+sqrt(r0.^2-e.^2)));c=b./pi.*180;plot(x,c,'r.');grid;xlabel('δ/°')ylabel('α/°')title('压力角曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 凸轮廓线clccleare=6;h=38.49;r0=32;as0=2./9.*pi;a0=1./3.*pi;as1=2./9.*pi;a1=1./3.*pi;as2=2./9.*pi;aa=2./3.*pi;rr=4;a=0:pi/1000:2./9.*pi;R1=r0;R=R1.*sqrt(sin(a).^2+cos(a).^2);polar(a,R,'r.')hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=2./9.*pi:pi/1000:5./9.*pi;s=0.25*h.*(1-cos(3*(a-2./9.*pi)));S=sqrt(r0.^2-e.^2)+s;R=sqrt(e.^2+S.^2);polar(a,R,'r.')hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=5./9.*pi:pi/1000:7./9.*pi;R1=r0+0.25*h.*(1-cos(3*(5./9.*pi-2./9.*pi)));R=R1.*sqrt(sin(a).^2+cos(a).^2);hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=7./9.*pi:pi/1000:10./9.*pi;s=0.5*h+0.25*h.*(1-cos(3*(a-7./9.*pi)));S=sqrt(r0.^2-e.^2)+s;R=sqrt(e.^2+S.^2);polar(a,R,'r.')hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=10./9.*pi:pi/1000:4./3.*pi;R1=r0+0.5*h+0.25*h.*(1-cos(3*(10./9.*pi-7./9.*pi))); R=R1.*sqrt(sin(a).^2+cos(a).^2);polar(a,R,'r.')hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=4./3.*pi:pi/1000:2.*pi;s=0.5*h.*(1+cos(1.5*(a-4./3.*pi)));S=sqrt(r0.^2-e.^2)+s;R=sqrt(e.^2+S.^2);polar(a,R,'r.')hold on;Rs=R-rr;polar(a,Rs,'black.')hold on;a=0:pi/1000:2.*pi;R1=r0;R=R1.*sqrt(sin(a).^2+cos(a).^2);polar(a,R,'b.')hold on;a=0:pi/1000:2.*pi;R1=e;R=R1.*sqrt(sin(a).^2+cos(a).^2);hold on;plot(0,0,'r+','markersize',30);a=0:pi/1000:2.*pi;x=rr.*cos(a)+r0;y=rr.*sin(a)+e;plot(x,y,'r.');a=r0:0.01:50;y=e;plot(a,y,'r.');grid;axis tighttitle('凸轮廓线示意图') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 凸轮从动件位移clccleare=6;h=38.49;r0=32;x=0:0.01:40;s=0;plot(x,s,'r.');hold on;x=40:0.01:100;a=(x./360).*2.*pi;s=0.25*h*(1-cos(3*(a-2./9.*pi)));plot(x,s,'r.');hold on;x=100:0.01:140;s=0.5*h;plot(x,s,'r.');hold on;x=140:0.01:200;a=(x./360).*2.*pi;s=0.5*h+0.25*h*(1-cos(3*(a-7./9.*pi)));plot(x,s,'r.');x=200:0.01:240;s=h;plot(x,s,'r.');hold on;x=240:0.01:360;a=(x./360).*2.*pi;s=0.5*h*(1+cos(1.5*(a-4./3.*pi)));plot(x,s,'r.');hold on;axis([0 360 0 40])grid;xlabel('δ/°')ylabel('s/mm')title('凸轮从动件位移曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 凸轮从动件类速度clccleare=6;h=38.49;r0=32;x=0:0.01:40;s=0;plot(x,s,'r.');hold on;x=40:0.01:100;a=(x./360).*2.*pi;s=0.75*h*sin(3*(a-2./9.*pi));plot(x,s,'r.');hold on;x=100:0.01:140;s=0;plot(x,s,'r.');hold on;x=140:0.01:200;a=(x./360).*2.*pi;s=0.75*h*sin(3*(a-7./9.*pi));hold on;x=200:0.01:240;s=0;plot(x,s,'r.');hold on;x=240:0.01:360;a=(x./360).*2.*pi;s=-0.75*h*sin(1.5*(a-4./3.*pi));plot(x,s,'r.');hold on;axis([0 360 -30 30])grid;xlabel('δ/°')ylabel('ds/dδ/mm·s^-1')title('凸轮从动件类速度曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 凸轮从动件类加速度clccleare=6;h=38.49;r0=32;x=0:0.01:40;s=0;plot(x,s,'r.');hold on;x=40:0.01:100;a=(x./360).*2.*pi;s=2.25*h*cos(3*(a-2./9.*pi));plot(x,s,'r.');hold on;x=100:0.01:140;s=0;plot(x,s,'r.');hold on;x=140:0.01:200;a=(x./360).*2.*pi;s=2.25*h*cos(3*(a-7./9.*pi));plot(x,s,'r.');hold on;x=200:0.01:240;s=0;plot(x,s,'r.');hold on;x=240:0.01:360;a=(x./360).*2.*pi;s=-1.125*h*cos(1.5*(a-4./3.*pi));plot(x,s,'r.');hold on;axis([0 360 -100 100])grid;xlabel('δ/°')ylabel('d2s/dδ2/mm·s^-2')title('凸轮从动件类加速度曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 曲柄滑块设计图clearclct=0:pi/180:2*pi;e=20;r0=1;%构建连接圆半径h=60;k=1.25;c=180*(k-1)/(k+1);r=0.5*sqrt(2*e*h*(1/tan(c*pi/180)-1/sin(c*pi/180))+h^2);l=0.5*sqrt(2*e*h*(1/tan(c*pi/180)+1/sin(c*pi/180))+h^2);x=r*cos(t);%曲柄圆参数方程y=r*sin(t);%曲柄圆参数方程k1=-e/(sqrt((l-r)^2-e^2));%右极限曲柄连杆位置函数的斜率k2=-tan(atan(-k1)-20*pi/180);%左极限曲柄连杆位置函数的斜率x1=e/k1:0.01:r*cos(atan(-k1));x2=e/k2:0.01:0;y1=k1*x1;%右极限曲柄连杆位置函数y2=k2*x2;%左极限曲柄连杆位置函数line([-120,20],[0,0]);%画曲柄旋转轴所在水平线hold online([-120,20],[20,20]);%滑块行程所在线plot(x,y);%画曲柄圆hold onrectangle('position',[-0.6,-0.6,1.2,1.2],'curvature',[1,1],'facecolor','k');%画曲柄圆圆心text(-9,-6,'O1');%标注曲柄圆圆心为O1hold onplot(x1,y1,'k','linewidth',2);%画左极限曲柄连杆位置hold onplot(x2,y2,'k','linewidth',2);%画右极限曲柄连杆位置hold onx_p=e/k2:0.01:e/k1;y_p=tand(70)*(x_p-e/k1)+e;plot(x_p,y_p);%画直角三角形hold online([e/k2,e/k2],[e,tand(70)*(e/k2-e/k1)+e]);%画直角三角形hold onrectangle('position',[e/k2-0.6,tand(70)*(e/k2-e/k1)+e-0.6,1.2,1.2],'curvature',[1,1],'facecolor','k');text(e/k2-5,tand(180-70)*(e/k1-e/k2)+15,'P');%标注三角形第三个点Phold ond=sqrt((e/k2-e/k1)^2+(tand(70)*(e/k2-e/k1))^2);%计算大圆直径x_o=d/2*cos(t)-(-e/k1)-(e/k1-e/k2)/2;%大圆直径参数方程y_o=d/2*sin(t)+e+(e+(tand(180-70)*(e/k1-e/k2)-e))/2;%大圆直径参数方程plot(x_o,y_o);%画大圆rectangle('position',[-(-e/k1)-(e/k1-e/k2)/2-0.6,e+(e+(tand(180-70)*(e/k1-e/k2)-e))/2-0.6,1.2,1.2],'curvature',[1,1],'facecolor','k');%画大圆圆心text(-(-e/k1)-(e/k1-e/k2)/2+2,e+(e+(tand(180-70)*(e/k1-e/k2)-e))/2-2,'O2');%标注大圆圆心为O2'hold online([e/k2-5,e/k2-5],[e-4,e+4],'linewidth',2,'color','k');%画左极限滑块hold online([e/k2+5,e/k2+5],[e-4,e+4],'linewidth',2,'color','k');%画左极限滑块hold online([e/k2-5,e/k2+5],[e+4,e+4],'linewidth',2,'color','k');%画左极限滑块hold online([e/k2-5,e/k2+5],[e-4,e-4],'linewidth',2,'color','k');%画左极限滑块hold online([e/k1-5,e/k1-5],[e-4,e+4],'linewidth',2,'color','k');%画右极限滑块hold online([e/k1+5,e/k1+5],[e-4,e+4],'linewidth',2,'color','k');%画右极限滑块line([e/k1-5,e/k1+5],[e-4,e-4],'linewidth',2,'color','k');%画右极限滑块hold online([e/k1-5,e/k1+5],[e+4,e+4],'linewidth',2,'color','k');%画右极限滑块hold onx3=r0*cos(t)+r*cos(atan(k1));y3=r0*sin(t)+r*sin(atan(k1));plot(x3,y3);text(r*cos(atan(k1))+3,r*sin(atan(k1)),'A1');hold onx4=r0*cos(t)+e/k1;y4=r0*sin(t)+e;plot(x4,y4);text(e/k1-3,e+8,'B1');%给右极限滑块标注B1hold onx5=r0*cos(t)+e/k2;y5=r0*sin(t)+e;plot(x5,y5);text(e/k2-3,e+8,'B2');%给左极限滑块标注B2hold onx6=r0*cos(t)-r*cos(atan(-k2));y6=r0*sin(t)+r*sin(atan(-k2));plot(x6,y6);text(-r*cos(atan(-k2))-2,r*sin(atan(-k2))-5,'A2');hold ontitle('曲柄滑块设计图');axis equal %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 曲柄滑块位移clccleare=20;h=60;k=1.25;p=pi/180;c=180*(k-1)/(k+1);q=0.5.*sqrt(2.*e.*h.*(1./tan(c.*pi./180)-1/sin(c.*pi./180))+h.^2);l=0.5.*sqrt(2.*e.*h.*(1./tan(c.*pi./180)+1/sin(c.*pi./180))+h.^2);w1=42.*pi./30;x=0:0.001:360;L0=sqrt((l-q).^2-e.^2);a0=pi-atan(e./L0);a1=a0+x.*p;sina2=(-q.*sin(a1)-e)./l;a2=atan(sina2/(sqrt(1-sina2.^2)));w2=(-q.*w1.*cos(a1))./(q.*cos(a2));b2=(q.*w1.^2.*sin(a1)+l.*w2.^2.*sina2)/(l.*cos(a2));s=q.*cos(a1)+l.*cos(a2)-L0;plot(x,s,'r.');grid;hold on;xlabel('Ψ/°')ylabel('s/mm')title('滑块位移曲线') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 滑块速度clccleare=20;h=60;k=1.25;p=pi/180;c=180*(k-1)/(k+1);q=0.5.*sqrt(2.*e.*h.*(1./tan(c.*pi./180)-1/sin(c.*pi./180))+h.^2);l=0.5.*sqrt(2.*e.*h.*(1./tan(c.*pi./180)+1/sin(c.*pi./180))+h.^2);w1=42.*pi./30;x=0:0.001:360;L0=sqrt((l-q).^2-e.^2);a0=pi-atan(e./L0);a1=a0+x.*p;sina2=(-q.*sin(a1)-e)./l;a2=atan(sina2/(sqrt(1-sina2.^2)));w2=(-q.*w1.*cos(a1))./(q.*cos(a2));b2=(q.*w1.^2.*sin(a1)+l.*w2.^2.*sina2)/(l.*cos(a2));s=q.*cos(a1)+l.*cos(a2)-L0;v=diff(q.*cos(a1)+l.*cos(a2)-L0);plot(x,v,'r.');grid;hold on;xlabel('Ψ/°')ylabel('v/(mm/s)')title('滑块速度曲线')附录二推程压力角校核曲线回程压力角校核曲线凸轮廓线凸轮从动件位移凸轮从动件类速度凸轮从动件类加速度曲柄滑块位移。
第1章机械设计概要1-1机械设计的基本要求一、设计机器的基本要求1.机器功能的要求2.经济性要求3.劳动保护要求4.环境保护要求5.可靠性要求二、设计机械零件的基本要求1.强度要求2.刚度要求3.耐磨性要求4.结构工艺性要求5.减小质量的要求1-2机械设计的一般程序一、明确设计任务二、方案设计三、技术设计1.运动学设计2.动力学设计3.零件设计4.总装配草图设计5.总装配图与零件工作图设计四、编写技术文件1-3机械零件的主要失效形式与设计准则机械零件由于某些原因而丧失工作能力称为失效。
一、机械零件的主要失效形式1.断裂2.过大的变形3.表面破坏二、机械零件的设计准则1.强度准则2.刚度准则3.耐磨性准则4.振动准则1-4机械零件的设计方法与步骤一、机械零件的设计方法1.理论设计2.经验设计3.模型实验设计4.现代设计方法(1)优化设计(2)可靠性设计二、机械零件设计的步骤1-5机械零件设计的基本原则一、选择材料的基本原则1.强度2.刚度3.磨损4.制造工艺性5.材料经济性二、标准化的原则第2章机械零件的强度与耐磨性2-1机械零件的疲劳强度一、机械零件的载荷根据机器的额定功率或负载,按理论力学的方法求出的作用在零件上的载荷称为名义载荷,用符号或表示。
在机械设计过程中,通常用一个修正系数来补偿名义载荷与零件实际载荷之间的差异,这个修正系数称为载荷系数,用符号表示。
名义载荷乘以载荷系数就是设计计算时使用的计算载荷,即。
二、材料的疲劳曲线材料的真实疲劳机械对应的循环次数都比较大,因此工程上规定一个循环基数,而对应的应力就视为材料的疲劳极限。
材料的疲劳曲线公式:三、材料的极限应力图循环极限应力,屈服极限应力。
四、影响机械零件疲劳强度的因素1.应力集中的影响2.尺寸效应的影响3.表面质量的影响综合影响系数用零件的工作应力幅乘以综合影响系数或材料极限应力的幅值除以综合影响系数来考虑上述因素对零件疲劳强度的影响。
2019年中国大学机械设计制造及其自动化专业排名中国大学机械设计制造及其自动化专业排名排名学校名称等级排名学校名称等级排名学校名称等级1 西安交通大学A+ 10 西北工业大学A 19 燕山大学A2 浙江大学A+ 11 山东大学A 20 同济大学A3 上海交通大学A+ 12 吉林大学A 21 北京理工大学A4 清华大学A+ 13 华南理工大学A 22 华东理工大学A5 哈尔滨工业大学A+ 14 北京航空航天大学A 23 武汉理工大学A6 大连理工大学A+ 15 重庆大学A 24 西南交通大学A7 华中科技大学A 16 江苏大学A 25 合肥工业大学A8 天津大学A 17 东北大学A 26 广东工业大学A9 南京航空航天大学A 18 上海大学A 27 河北工业大学B+等(42个):北京科技大学、兰州理工大学、湖南大学、中南大学、西安电子科技大学、太原理工大学、四川大学、长春理工大学、东南大学、东华大学、哈尔滨理工大学、北京工业大学、西安理工大学、大连交通大学、桂林电子科技大学、浙江工业大学、南京理工大学、贵州大学、华侨大学、河南理工大学、福州大学、新疆大学、河海大学、北京交通大学、电子科技大学、哈尔滨工程大学、昆明理工大学、郑州大学、沈阳工业大学、上海理工大学、中国矿业大学、江南大学、沈阳理工大学、广西大学、河南科技大学、江苏科技大学、中北大学、陕西科技大学、西华大学、长春工业大学、西安科技大学、北京邮电大学B等(41个):武汉科技大学、南华大学、湖南科技大学、南昌大学、烟台大学、青岛科技大学、北方工业大学、山东科技大学、华东交通大学、辽宁工程技术大学、湘潭大学、大连大学、浙江理工大学、太原科技大学、江苏工业学院、沈阳航空工业学院、安徽工业大学、安徽工程科技学院、深圳大学、内蒙古科技大学、宁夏大学、扬州大学、西南科技大学、西南石油大学、华北电力大学、厦门大学、宁波大学、辽宁工学院、天津科技大学、五邑大学、青岛理工大学、北京工商大学、中国农业大学、杭州电子科技大学、武汉大学、安徽理工大学、苏州大学、天津工程师范学院、郑州轻工业学院、内蒙古工业大学、三峡大学中国大学学术职业准入制度探讨-“ 关键词:大学学术职业准入制度博士摘要:大学学术职业本身所具有的高深性、自治性、专业性和集合性决定了大学学术职业应具有更为严格的职业准入制度。