单人电动茶叶采摘机主要机构设计
- 格式:pdf
- 大小:1.10 MB
- 文档页数:3
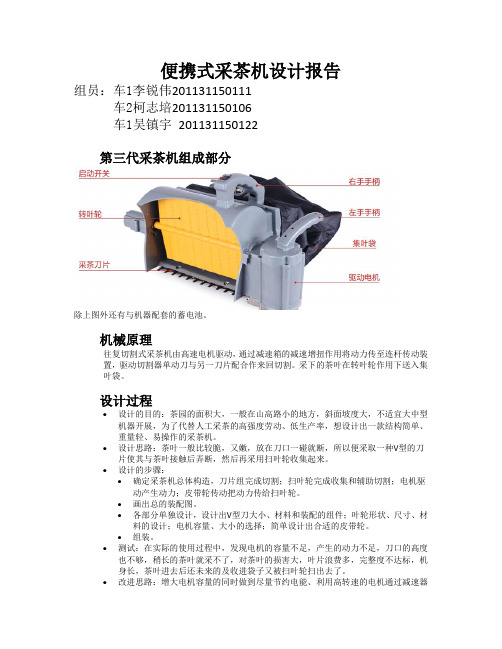
便携式采茶机设计报告组员:车1李锐伟201131150111车2柯志培201131150106车1吴镇宇201131150122第三代采茶机组成部分除上图外还有与机器配套的蓄电池。
机械原理往复切割式采茶机由高速电机驱动,通过减速箱的减速增扭作用将动力传至连杆传动装置,驱动切割器单动刀与另一刀片配合作来回切割。
采下的茶叶在转叶轮作用下送入集叶袋。
设计过程∙设计的目的:茶园的面积大,一般在山高路小的地方,斜面坡度大,不适宜大中型机器开展,为了代替人工采茶的高强度劳动、低生产率,想设计出一款结构简单、重量轻、易操作的采茶机。
∙设计思路:茶叶一般比较脆,又嫩,放在刀口一碰就断,所以便采取一种V型的刀片使其与茶叶接触后弄断,然后再采用扫叶轮收集起来。
∙设计的步骤:∙确定采茶机总体构造,刀片组完成切割;扫叶轮完成收集和辅助切割;电机驱动产生动力;皮带轮传动把动力传给扫叶轮。
∙画出总的装配图。
∙各部分单独设计,设计出V型刀大小、材料和装配的组件;叶轮形状、尺寸、材料的设计;电机容量、大小的选择;简单设计出合适的皮带轮。
∙组装。
∙测试:在实际的使用过程中,发现电机的容量不足,产生的动力不足,刀口的高度也不够,稍长的茶叶就采不了,对茶叶的损害大,叶片浪费多,完整度不达标,机身长,茶叶进去后还未来的及收进袋子又被扫叶轮扫出去了。
∙改进思路:增大电机容量的同时做到尽量节约电能、利用高转速的电机通过减速器增大扭力、重新布局结构,增大机体内部空间、为扫叶轮多加一份屏障。
∙改进具体措施:选择高容量电池(保证重量的前提),重新选择电机;然后设计减速器,利用齿轮传动和实现变速;把扫叶轮每片错开30度,形成螺旋式的排列,可以把电机传过来的扭力可以集中用到一个点上,同时扫叶轮的叶片中间采用网状式的通孔,减少阻力,二者都是为了节约电能;另外在机体的内部在扫叶轮上方加个挡板防止茶叶被重新扫出。
∙重新测试:性能已经比较有明显的进步,但关键的问题完整度不达标还是没解决。

基于机器视觉的茶叶自动采摘机械手装配系统设计周伟【摘要】对于茶叶企业转型发展来说,技术创新与科技应用,已经发展成为推动茶叶产业成熟发展的核心动力.同时更是现阶段茶叶产业合理应对市场竞争的价值诉求,也是保持整个产业良性发展的关键诉求.所以,充分发挥机器视觉的应用优势,提升茶叶的采摘效率就极为重要.本文拟从机器视觉的特点与优势分析入手,结合茶叶自动采摘机械手装配系统设计应用背景认识,从而探究基于机器视觉的茶叶自动采摘机械手装配系统设计.【期刊名称】《福建茶叶》【年(卷),期】2018(040)012【总页数】1页(P13)【关键词】机器视觉;茶叶产品;自动采摘机械手;装配系统;设计思路【作者】周伟【作者单位】河南工业职业技术学院,河南南阳473000【正文语种】中文在机器视觉系统日益成熟的今天,在茶叶产品等级分类检测以及包装检测过程中,该技术实现了成熟发展,其不仅大大提升了茶叶采摘过程中的品质,切实提升了茶叶生产的效率,有效发挥了先进技术的应用优势。
对于机器视觉技术来说,其中最为突出的特点,就是要通过发挥该技术的优势,从而切实提升整个生产活动的灵活性与自动化水平。
对于复杂生产活动来说,可以使用机器视觉技术来代替人工视觉技术,并且实现生产效率与自动化水平的全面提升。
1 机器视觉的特点与优势分析在当前人工智能技术迅猛发展的今天,机器视觉技术实现了成熟开发。
通俗地看,机器视觉技术中,更多是一种使用机器来替代人工来进行测量与评判的技术。
在机器视觉技术中,通过使用CMOS和CCD两种机器视觉装置,进而将具体摄取的目标内容,转换为相应的数据图像信号元素。
同时借助该系统化,将其及时传输给专用的图像处理机制,进而获取具体的数据信息。
在使用机器视觉技术时,可以将具体拍摄目标的亮度和颜色等一系列基本信息,转为系统化的数字信号,通过使用具体的数据运算,从而获取相应的数据目标。
结合机器视觉技术的具体特点看,作为一项性综合技术,其中包含了图像信息处理和光学成像,乃至模拟数字技术和图像增强等技术,从而发挥该技术的最佳应用效果。
山茶采摘平台升降机构结构设计摘要:山茶采摘平台机械结构设计的主要目的是提高采摘的工作效率,降低人工作业的工作强度,实现对果实成熟时采摘的机械化,智能化。
本系统利用先进的机械化来替代繁重且低效益的农业生产方式,通过科学的方法使农民的采摘作业更有效率,从而达到节省劳动力促进生产的目的。
关键词:采摘平台;剪叉式液压升降平台;液压缸;山茶Elevating System Structure Design of the Camellia Picking LiftingPlatformAbstract: The main purpose of the Mechanical Structure Design of the Camellia Picking Platform is to improve the picking efficiency ,to reduce the working intensity, and to realize the mechanization and intelligentization of picking. The system uses advanced mechanization to replace the hard and low efficiency of the mode of agricultural production. Through the scientific method , this design makes farmers picking operations more efficient, thus to save labor to promote production.Key words: picking platform; scissor type hydraulic pressure lifting platform; hydraulic cylinder; camellia1 前言1.1 研究目的及意义中国是农业大国,作为国民经济基础的农业,其发展水平和劳动生产效率的高低, 决定了它为其他部门提供剩余产品和劳动力的数量, 从而制约了这些部门的发展规模和速度。

山茶采摘平台设计研究摘要:随着国内外采摘机器人的兴起,21世纪是农业机械化向智能化方向发展的重要历史时期,机械作业已逐步进入农业生产领域。
本文研究设计了能减轻人工劳动强度和提高工作效率的山茶采摘平台,平台由主控模块、行走模块(全向履带)和升降模块组成。
系统以STM32为核心控制器,通过对伺服电机的控制可实现采摘平台的行走控制和升降控制。
本文结合由铝型材制作的采摘平台的实物模型对系统的设计进行了分析和总结。
关键词:机器人;农业机械化;采摘平台;全向履带Design and research of the camellia picking platformAuthor: Huang LiTutor: Li Xu(Orient Science & Technology College of Hunan Agricultural University, Changsha 410128, China)Abstract: With the rise of the picking robot at home and abroad, the 21st century is an important historical period of the mechanization of agriculture to the intelligent direction, the robot has gradually entered the field of agricultural production. This study design can reduce labor intensity and improve the efficiency of the camellia picking platform, This picking platform by walking module(Omni-track), lifting module and main control module. The system use the STM32 as the core controller. The control of servomotor can be achieved walking and lifting of the picking platform. The design of the physical model produced by the aluminum picking platform system was analyzed and summarized in this paper.Key words: Robot; mechanization of agriculture; picking platform; Omni-track目录摘要 (1)关键词 (1)1 前言 (1)1.1 研究意义与目的 (2)1.2 国内外研究现状 (2)2 山茶采摘平台创意设计与方案 (6)2.1 机器人一般组成 (6)2.2 山茶采摘平台设计方案 (6)2.3 研制概要 (7)3采摘平台机械设计 (7)3.1底盘的设计 (7)3.1.1基于45°全向轮的分析 (7)3.1.2一种山地行走系统用全向履带 (10)3.2 升降机构的设计 (11)4采摘平台电路硬件电路设计 (13)4.1系统原理框图 (13)4.2采摘主控制板结构及说明 (13)4.2.1最小系统 (14)4.2.2主控制板实物图 (14)4.3电源模块 (15)4.4伺服电机驱动电路 (16)4.5按键电路 (20)5主控制板程序设计 (21)5.1 系统主程序流程图 (21)5.2PWM的产生 (21)5.2.1软件生成PWM (21)5.2.2硬件生成PWM (23)6 系统的调试 (25)7 总结 (25)参考文献 (25)致谢 (26)附录 (27)1 前言机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现。
2018年第10期生产技术作者简介:窦崧源(1996-),男,天津人,本科在读,研究方向:机械电子工程。
对于当前茶叶生产活动来说,使用自动采摘机械装置极为必要,其不仅是茶叶产业规模化生产与种植的要求,同时更是满足茶叶产品品质要求下的生产要求。
对于茶叶自动采摘来说,自动采摘机械装置中所关联的各项电子工作参数,不仅关系到茶叶生产的品质,同时也直接影响到当前茶叶产业的规模化生产。
1茶叶自动采摘机器应用的具体背景分析茶叶中含有多种营养元素,据统计,其营养成分超过了400种。
在茶叶采摘过程中,茶叶产品的采摘状况直接关系和影响到茶叶产品自身的品质,因此,想要采集到标准、纯正的鲜叶元素,就必须充分注重提升茶叶的采摘技术、水平。
合理的茶叶采摘活动,不仅能够有效确保茶叶产品的品质,同时也能够有效确保茶树自身的成长。
通过及时采摘顶端茶叶,从而有效解除了顶芽对侧芽的影响,人为缩短了茶叶的生长过程,正是通过合理采摘,从而促进生长出更多嫩芽,实现茶叶产量的有效提升。
对于茶叶采摘来说,想要提升其采摘效率,实现高档茶叶的品质要求,就必须对当前所具体使用茶叶采摘机械予以必要革新与创造,进而来具体满足不同品质、不同品种下的茶叶采摘要求,从而实现茶叶采摘的及时分类与分级。
通过对茶叶自动采摘机械装置的电子工作参数进行优化,其能够在完成采茶动作的同时,按照实际需要和采摘要求进行改进和优化,在对整个改进方案进行实际验证之后,对整个系统运行的优缺点进行分析,进而优化整个机械装置。
此外,要在具体满足采摘机械装置性能要求的前提下,尽可能去降低其生产成本,通过对生产结构进行优化,通过有效把控其自动采摘效率,从而使得整个茶叶自动采摘机械化效率能够实现更为广泛的应用。
2茶叶自动采摘机械装置的各项影响因素分析在当前茶叶产业经营发展中,技术设备的创新已经发展成为现阶段该产业经营创新的关键所在。
在传统的茶叶采摘加工过程中,其劳动强度较大,同时生产效率也比较低,成本也较高。

关于茶叶采摘机器人机械结构设计及控制系统研究发布时间:2021-07-12T01:43:32.219Z 来源:《中国科技人才》2021年第11期作者:刘明磊[导读] 茶叶人工采摘的成本较高,同时采摘时间具有严格控制要求。
在信息技术发展背景下,节省了一定量的劳动力资源,对茶产业信息化建设产生了阻碍作用。
在使用大型机械化采摘设施时,显著缩短了采摘时间。
农芯科技(北京)有限责任公司 100097摘要:本文以茶叶采摘机器人为研究视角,对其开展机械结构、控制程序的设计。
结构设计包括:茶叶特点、采摘程序。
控制程序设计包括:设计方案、通信模块、数据反馈。
借助结构与控制程序的双重设计,以期提升茶叶采摘技术的智能性,减少对茶树产生的损坏,维护茶园管理效果。
关键词:采摘机器人;茶叶;传动机制引言:茶叶人工采摘的成本较高,同时采摘时间具有严格控制要求。
在信息技术发展背景下,节省了一定量的劳动力资源,对茶产业信息化建设产生了阻碍作用。
在使用大型机械化采摘设施时,显著缩短了采摘时间。
然而机械化切割工艺,尚未融合先进性的选择技术,对茶树形成了一定破坏作用,并未达到采摘标准。
1茶叶采摘机器人机械结构设计1.1茶叶特点分析(1)以A茶园为例,对其茶树特点进行分析,茶园基础情况:棚高介于800与900毫米之间,垄宽800毫米,垄间隔600毫米。
(2)茶叶特点分析:对于采摘获得的茶叶,分析其新梢规格特点,以确保执行设施采摘顺利性;对A茶园进行随机采摘,获得30片茶叶,制作成新梢样本,对样本新梢状态进行准确测量与统计,统计结果如表1所示。
表1 A茶园30片茶叶样品的外观测量统计结果如表1可知茶叶形态共有三种类型,分别为单芽n1、一芽一叶n2、一芽两叶n3;由此可获得采茶设施的运动行程,使采茶机器人在作业状态时,能够有效减少执行设施与茶叶之间的摩擦问题。
因此,采茶手柄活动行程,需不小于表1中的最大值(53毫米),同时采茶执行设施处于工况时,其内部刀片、垫块两者间距设计结果,同样不小于53毫米,以保障设计效果。
6农机使用与维修2021年第3期自走平衡式电动采茶机的结构设计黄升,卢伟,吴顾斌,蒋红达,方子祥(桂林电子科技大学机电工程学院,广西 桂林541004)摘要:目前,背负式采茶机工作噪音大、工人劳动强度大、采茶效率低,大型自走式采茶机又受到地形及种植要求限制,不利于推广使用。
为了解决上述技术问题,设计了一种自走平衡式采茶机,并利用SolidWorks软件三维建模,对采茶机总体结构进行了设计。
关键词:采茶机;结构设计;自走平衡式;茶叶采摘中图分类号:S225.93文献标识码:A doi:10.14031/ki.njwx.2021.03.0030引言在近十年前,我国很多地方对茶叶的采摘还是依靠手工进行,虽然这样的劳动方式使茶叶的质量得到了保证,但其生产效率低下。
因此近些年市场上出现了一些采茶机,但存在一些问题,例如传统汽油采茶机存在油耗多、噪音大、对茶叶有污染、受地势限制等,无法满足绿色有机茶的要求。
为了节能环保,市场上又出现了单人或者双人操作的电动采茶机,但都是手提操作,这对采茶工来说仍然有很大的劳动强度,而且手提操作采茶不容易把握好基金项目:本项目为国家级大学生创新训练项目(202010595059)的经费支持作者简介:黄升(1999-),男,壮族,广西百色人,本科在读,研究方向:机械创新设计。
通讯作者:卢伟(1973-),男,汉族,黑龙江佳木斯人,博士,副教授,研究方向:机械设计与仿真优化。
采茶的平衡度,这会对茶叶有一定的损坏,影响到茶叶的品质。
为解决上述问题,本文设计了一款自走平衡式电动采茶机。
1结构特点这款自走平衡式电动采茶机主要由六部分组成,即采茶系统、收茶系统、平衡系统、自走系统、制动系统和控制系统,各个系统特点如下。
1.1采茶系统采茶系统设计为往复切割式双层齿状刀片剪切机构,上刀片不动,下刀片做往复直线运动,往复直线运动用圆柱凸轮机构实现⑷。
考虑茶园茶带剪切面的形状是拱形圆弧曲面形,所以用于切割的齿状刀片设计成拱形圆弧曲面形。
文章标题:探寻第五代采茶机器人的构造和工作原理一、引言在当今社会,随着科技的迅速发展,机器人技术正在逐渐渗透到各个行业。
其中,农业领域也不例外,特别是在茶叶产业中,机器人的应用正逐渐成为现实。
本文将深入探讨第五代采茶机器人的构造和工作原理,带你了解这一创新技术的奥秘。
二、第五代采茶机器人的构造1. 机械结构第五代采茶机器人采用轮式移动评台,配备有多轴机械手臂,可实现对茶叶的精确采摘和处理。
机器人配备有高清晰度摄像头和传感器,以便获得对茶叶生长状态的准确信息。
2. 控制系统机器人的控制系统采用先进的人工智能技术,能够根据茶叶生长的不同阶段进行智能化的决策和操作。
控制系统还能够实现与其他机器人的协同作业,提高采茶效率。
3. 电源系统第五代采茶机器人配备高容量的电池,能够在一个充电周期内持续工作数小时,大大提高了机器人的工作效率和灵活性。
三、第五代采茶机器人的工作原理1. 数据获取机器人首先通过高清晰度摄像头和传感器获取茶园中茶叶的生长信息,包括生长状态、成熟度和果实大小等。
2. 智能决策通过内置的人工智能算法,机器人能够根据获取的数据做出智能决策,确定采摘的时机和方式。
3. 精准采摘机器人利用多轴机械手臂进行茶叶的精准采摘,保证了采摘的效率和质量。
4. 数据记录机器人会将采摘的数据进行记录,包括数量、质量和生长状态,以便农场主进行管理和分析。
四、个人观点和理解第五代采茶机器人的出现,无疑将会对茶叶产业产生深远的影响。
它不仅提高了采茶的效率和质量,还能够减少人力成本和劳动强度。
但是,机器人无法完全替代人类的角色,人类的智慧和经验仍然是茶叶产业中不可或缺的一部分。
五、总结和回顾通过本文的详细介绍,我们对第五代采茶机器人的构造和工作原理有了更深入的了解。
机器人技术的应用为茶叶产业注入了新的活力,也为我们展示了科技的魅力和力量。
在知识上,有关“第五代采茶机器人的构造和工作原理”的文章和讨论也很受欢迎,为感兴趣的读者提供了更深入的学习和了解机会。
自动化采茶机引言概述:自动化采茶机是一种利用先进的技术和装置来实现茶叶采摘过程的自动化设备。
它能够提高茶叶采摘的效率和质量,减轻人工劳动强度,对茶叶产业的发展具有重要意义。
本文将从机器的结构、工作原理、优势、应用领域和未来发展等五个方面分析自动化采茶机。
一、机器的结构:1.1 机械臂:自动化采茶机的核心部件是机械臂,它通过电动机驱动,能够在茶树枝条之间自由伸缩,实现茶叶的采摘。
1.2 摄像头:机器配备了高分辨率的摄像头,能够实时监测茶树的生长情况和茶叶的成熟度,从而指导机械臂的采摘操作。
1.3 控制系统:自动化采茶机采用先进的控制系统,能够根据茶树的生长情况和茶叶的成熟度,自动调整机械臂的动作,实现精准采摘。
二、工作原理:2.1 图象识别:摄像头拍摄茶树图象,并通过图象识别算法判断茶叶的成熟度和采摘位置。
2.2 机械臂动作:根据图象识别结果,控制系统指导机械臂准确地伸缩和旋转,将成熟的茶叶采摘下来。
2.3 茶叶采集:采摘下来的茶叶通过传送带或者其他装置送到采集箱中,方便后续处理和加工。
三、优势:3.1 提高效率:自动化采茶机能够连续不断地工作,不受时间和环境限制,大大提高了采茶的效率。
3.2 保证质量:机器能够根据茶叶的成熟度进行精准采摘,避免了人工采摘中的误伤和漏采现象,保证了茶叶的质量。
3.3 减轻劳动强度:自动化采茶机取代了人工采摘的繁重劳动,减轻了茶农的劳动强度,提高了工作效率。
四、应用领域:4.1 大规模茶园:自动化采茶机适合于大规模的茶园,能够快速高效地采摘茶叶,提高茶叶的产量和质量。
4.2 高山茶园:自动化采茶机能够适应复杂的地形和环境,实现茶叶的高效采摘,解决了高山茶园采摘难的问题。
4.3 茶叶加工企业:自动化采茶机的应用能够提供高质量的原料茶叶,为茶叶加工企业提供更好的生产基础。
五、未来发展:5.1 智能化:未来的自动化采茶机将更加智能化,能够通过大数据和人工智能技术,实现更精准的采摘和更高效的工作。
茶叶修剪机的设计
茶叶修剪机通常由以下几个部分组成:
1.机身:包括外壳和内部部件组装支架。
2.电机:驱动修剪刀头旋转切割茶叶。
3.刀头组:通常由两个旋转切割刀头组成,在集成茶叶修剪机中,刀头组可由可替换的切割刀头组成,以适应不同的茶叶修剪需求。
4.控制系统:包括电路板和开关等控制元件,用于控制电动机和刀头组的工作。
5.电源:通常采用充电式锂离子电池,因为茶园通常较大,无法通过电线供电。
茶叶修剪机应该具有以下特点:
1.简单易用:茶叶修剪机的设计应尽量简单易用,使茶园工作人员能够快速上手操作。
2.耐用:茶叶修剪机应该使用优质材料制成,以确保其长时间使用,并且需要经常清洁和维护。
3.便携:茶叶修剪机在使用时需要携带,因此其设计应该具有轻便的特点,方便工作人员携带。
4.低噪音:嘈杂的声音会对茶树和茶叶产生不利影响,因此茶叶修剪机不能产生嘈杂的声音。
5.高效:茶叶修剪机应具有高效的修剪功能,以便快速完成修剪工作。
6.具有可替换的切割刀头:茶叶修剪机的刀头应该具有可替换的特性,以适应不同的修剪需求。