传感器作业——非线性误差分析
- 格式:doc
- 大小:376.50 KB
- 文档页数:4
传感器非线性误差的修正传感器非线性误差的修正摘要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
二、采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
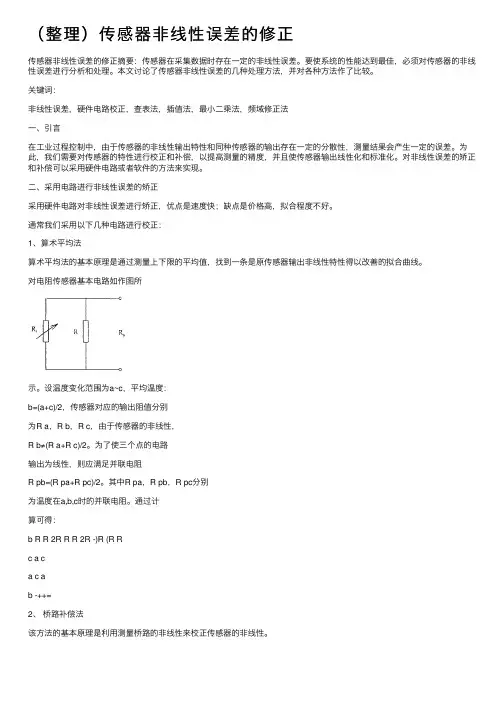
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33t B R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33b b b R R R R V +-=ε)//21(33c b c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。
1. 非线性误差磁电式传感器产生非线性误差的主要原因是: 由于传感器线圈内有电流I 流过时, 将产生一定的交变磁通ΦI, 此交变磁通叠加在永久磁铁所产生的工作磁通上, 使恒定的气隙磁通变化如图7 - 3所示。
当传感器线圈相对于永久磁铁磁场的运动速度增大时, 将产生较大的感生电势E 和较大的电流I, 由此而产生的附加磁场方向与原工作磁场方向相反, 减弱了工作磁场的作用, 从而使得传感器的灵敏度随着被测速度的增大而降低。
当线圈的运动速度与图7 - 3所示方向相反时, 感生电势E 、 线圈感应电流反向, 所产生的附加磁场方向与工作磁场同向, 从而增大了传感器的灵敏度。
其结果是线圈运动速度方向不同时, 传感器的灵敏度具有不同的数值, 使传感器输出基波能量降低, 谐波能量增加。
即这种非线性特性同时伴随着传感器输出的谐波失真。
显然,传感器灵敏度越高, 线圈中电流越大, 这种非线性越严重。
为补偿上述附加磁场干扰, 可在传感器中加入补偿线圈, 如图7 - 2(a )所示。
补偿线圈通以经放大K 倍的电流, 适当选择补偿线圈参数, 可使其产生的交变磁通与传感线圈本身所产生的交变磁通互相抵消, 从而达到补偿的目的。
7.2 霍尔式传感器霍尔传感器是基于霍尔效应的一种传感器。
1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应, 但由于金属材料的霍尔效应太弱而没有得到应用。
随着半导体技术的发展, 开始用半导体材料制成霍尔元件, 由于它的霍尔效应显著而得到应用和发展。
霍尔传感器广泛用于电磁测量、压力、加速度、振动等方面的测量。
一、 霍尔效应及霍尔元件二、 1. 霍尔效应置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势, 这种现象称霍尔效应。
该电势称霍尔电势。
图 7 - 8 所示, 在垂直于外磁场B 的方向上放置一导电板, 导电板通以电流I, 方向如图所示。
1. 非线性误差磁电式传感器产生非线性误差的主要原因是: 由于传感器线圈内有电流I 流过时, 将产生一定的交变磁通ΦI, 此交变磁通叠加在永久磁铁所产生的工作磁通上, 使恒定的气隙磁通变化如图7 - 3所示。
当传感器线圈相对于永久磁铁磁场的运动速度增大时, 将产生较大的感生电势E 和较大的电流I, 由此而产生的附加磁场方向与原工作磁场方向相反, 减弱了工作磁场的作用, 从而使得传感器的灵敏度随着被测速度的增大而降低。
当线圈的运动速度与图7 - 3所示方向相反时, 感生电势E 、 线圈感应电流反向, 所产生的附加磁场方向与工作磁场同向, 从而增大了传感器的灵敏度。
其结果是线圈运动速度方向不同时, 传感器的灵敏度具有不同的数值, 使传感器输出基波能量降低, 谐波能量增加。
即这种非线性特性同时伴随着传感器输出的谐波失真。
显然,传感器灵敏度越高, 线圈中电流越大, 这种非线性越严重。
为补偿上述附加磁场干扰, 可在传感器中加入补偿线圈, 如图7 - 2(a )所示。
补偿线圈通以经放大K 倍的电流, 适当选择补偿线圈参数, 可使其产生的交变磁通与传感线圈本身所产生的交变磁通互相抵消, 从而达到补偿的目的。
7.2 霍尔式传感器霍尔传感器是基于霍尔效应的一种传感器。
1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应, 但由于金属材料的霍尔效应太弱而没有得到应用。
随着半导体技术的发展, 开始用半导体材料制成霍尔元件, 由于它的霍尔效应显著而得到应用和发展。
霍尔传感器广泛用于电磁测量、压力、加速度、振动等方面的测量。
一、 霍尔效应及霍尔元件二、 1. 霍尔效应置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势, 这种现象称霍尔效应。
该电势称霍尔电势。
图 7 - 8 所示, 在垂直于外磁场B 的方向上放置一导电板, 导电板通以电流I, 方向如图所示。
(整理)传感器⾮线性误差的修正传感器⾮线性误差的修正摘要:传感器在采集数据时存在⼀定的⾮线性误差。
要使系统的性能达到最佳,必须对传感器的⾮线性误差进⾏分析和处理。
本⽂讨论了传感器⾮线性误差的⼏种处理⽅法,并对各种⽅法作了⽐较。
关键词:⾮线性误差,硬件电路校正,查表法,插值法,最⼩⼆乘法,频域修正法⼀、引⾔在⼯业过程控制中,由于传感器的⾮线性输出特性和同种传感器的输出存在⼀定的分散性,测量结果会产⽣⼀定的误差。
为此,我们需要对传感器的特性进⾏校正和补偿,以提⾼测量的精度,并且使传感器输出线性化和标准化。
对⾮线性误差的矫正和补偿可以采⽤硬件电路或者软件的⽅法来实现。
⼆、采⽤电路进⾏⾮线性误差的矫正采⽤硬件电路对⾮线性误差进⾏矫正,优点是速度快;缺点是价格⾼,拟合程度不好。
通常我们采⽤以下⼏种电路进⾏校正:1、算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到⼀条是原传感器输出⾮线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所⽰。
设温度变化范围为a~c,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a,R b,R c,由于传感器的⾮线性,R b≠(R a+R c)/2。
为了使三个点的电路输出为线性,则应满⾜并联电阻R pb=(R pa+R pc)/2。
其中R pa,R pb,R pc分别为温度在a,b,c时的并联电阻。
通过计算可得:b R R 2R R R 2R -)R (R Rc a ca c ab -++=2、桥路补偿法该⽅法的基本原理是利⽤测量桥路的⾮线性来校正传感器的⾮线性。
电路如右图所⽰。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到⽅程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此⽅程组可得到满⾜要求的R3、R B 、ε。
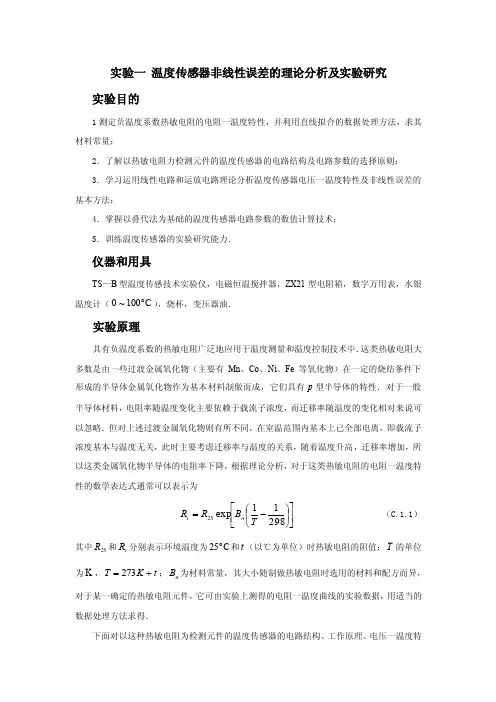
实验一 温度传感器非线性误差的理论分析及实验研究实验目的1测定负温度系数热敏电阻的电阻一温度特性,并利用直线拟合的数据处理方法,求其材料常量;2.了解以热敏电阻力检测元件的温度传感器的电路结构及电路参数的选择原则;3.学习运用线性电路和运放电路理论分析温度传感器电压一温度特性及非线性误差的基本方法;4.掌握以叠代法为基础的温度传感器电路参数的数值计算技术;5.训练温度传感器的实验研究能力.仪器和用具TS —B 型温度传感技术实验仪,电磁恒温搅拌器,ZX21型电阻箱,数字万用表,水银温度计(C 100~0︒),烧杯,变压器油.实验原理具有负温度系数的热敏电阻广泛地应用于温度测量和温度控制技术中.这类热敏电阻大多数是由一些过渡金属氧化物(主要有Mn 、Co 、Ni 、Fe 等氧化物)在一定的烧结条件下形成的半导体金属氧化物作为基本材料制做而成,它们具有p 型半导体的特性.对于一般半导体材料,电阻率随温度变化主要依赖于载流子浓度,而迁移率随温度的变化相对来说可以忽略.但对上述过渡金属氧化物则有所不同,在室温范围内基本上已全部电离,即载流子浓度基本与温度无关,此时主要考虑迁移率与温度的关系,随着温度升高,迁移率增加,所以这类金属氧化物半导体的电阻率下降,根据理论分析,对于这类热敏电阻的电阻一温度特性的数学表达式通常可以表示为⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=29811exp 25T B R R n t (C.1.1) 其中25R 和t R 分别表示环境温度为C 25︒和t (以℃为单位)时热敏电阻的阻值;T 的单位为K ,t K T +=273;n B 为材料常量,其大小随制做热敏电阻时选用的材料和配方而异,对于某一确定的热敏电阻元件,它可由实验上测得的电阻一温度曲线的实验数据,用适当的数据处理方法求得.下面对以这种热敏电阻为检测元件的温度传感器的电路结构、工作原理、电压一温度特性的线性化、电路参数的选择和非线性误差等问题论述如下:一、电路结构及工作原理电路结构如图C.1.l(b)所示,它是由含t R 的桥式电路及差分运算放大电路两个主要部分组成.当热敏电阻t R 所在环境温度变化时,差分放大器的输入信号及其输出电压o V 均要发生变化.传感器输出电压o V 随检测元件 t R 环境温度变化的关系称温度传感器的电压一温度特性.为了定量分析这一特性,可利用电路理论中的戴维南定理把图C.1.1(a )所示的电路等效变换成图C.1.1所示的电路,在图C.1.1中: t t G R R R R R +⋅=111,a tt S V R R R E +=11 (C.1.2) 它们均与温度有关;而 32322R R R R R G +⋅=,a S V R R R E 3232+= (C.1.3) 与温度无关.根据电路理论中的叠加原理,盖分运算放大器输出电压o V 可表示为+-+=o o o V V V (C.1.4)其中-o V 和+o V 分别为图 C.1.1所示电路中1S E 和2S E 单独作用时对输出电压的贡献.由运算放大器的理论知:11S G s fo E R R R V +-=-,++⎪⎪⎭⎫ ⎝⎛++=i G s f o V R R R V 11 (C.1.5)E 图C.1.1电路原理图及其等效电路 (b)式中的+i V 为2S E 单独作用时运放电路同相输入端的对地电压.由于运放电路输入阻抗很大,故f G s fS i R R R R E V ++⋅=+22 (C.1.6)把以上结果代入式(C.1.4),并经适当整理得⎥⎥⎦⎤⎢⎢⎣⎡-+++++=12211s s f s G f s G s G fo E E R R R R R R R R R V (C.1.7) 由于上式中1G R 和1S E 与温度有关,所以该式就是温度传感器电压一温度特性的数学表达式,只要电路参数和热敏元件t R 的电阻一温度特性已知,式(C.1.7)所表达的输出电压o V 与温度t 的函数关系就完全确定.二、电压一温度特性的线化和电路多数的选择一般情况下,式(C.1.7)表达的函数关系是非线性的,但通过适当选择电路参数可以使得这一关系和一直线关系近似.这一近似引起的误差与传感器的测温范围有关.设传感器的测温范围为21~t t ,则2312t t t +=就是测温范围的中值温度.若对应1t 、2t 和3t 三个温度值,传感器的输出电压分别为1o V 、2o V 和3o V 所谓传感器电压一温度特性的线性化就是适当选择电路参数使得这三个测量点在电压一温度坐标系中落在通过原点的直线上,即要求01=o V ,232o o V V =,33V V o = (C.1.8) 在图 所示的传感器电路中,需要确定的参数有七个,即 1R 、2R 、3R 、f R 和s R 的阻值,电桥的电源电压 a V 和传感器的最大输出电压3V ,这些参数的选择和计算可按以下原则进行:1.当温度为1t 时,电路参数应使得 01==o o V V ,这时电桥应工作于平衡状态和差分运放电路参数应处于对称状态,即要求1321t R R R R ===(热敏电阻在温度1t 时的阻值),但为了充分利用成品电阻元件,通常选取A R R R ==32,11t R R =,式中A R 为阻值最接近1t R 的电阻元件的系列值.2.为了尽量减小热敏电阻中流过的电流所引起的发热对测量结果带来的影响,a V 的大小不应使t R 中流过的电流超过mA 1.3.传感器的最大输出电压3V 的值应与后面联接的显示仪表相匹配,例如为了使测量仪表的指示与被测温度的数值一致,要求3V 在数字上与测温范围(13t t -)的数字一致.4.最后两个电路参数s R 和f R 的值可按式(C.1.8)所表示的线性化条件的后两个关系式确定,即⎥⎥⎦⎤⎢⎢⎣⎡-+++++==1322131333S S f s G f s G s G fo E E R R R R R R R R R V V ⎥⎥⎦⎤⎢⎢⎣⎡-+++++==12221212322S S f s G f s G sG f o E E R R R R R R R R R V V (C.1.10) 其中i G R 1、i S E 1(3,2,1=i )是热敏电阻t R 所处环境温度为i t 时按(C.1.2)式计算所得的1G R 和1S E 值.当电桥各桥臂阻值、电源电压a V 和热敏电阻的电阻一温度特性以及传感器最大输出电压3V 已知后,在(C.1.9)、(C.1.10)两式中除s R 、f R 外其余各量均具有确定的数值,这样只要联立求解(C.1.9)、(C.1.10)两式就可求出s R 和f R 的值.然而(C.1.9)、(C.1.10)两式是以s R 和f R 为未知数的二元二次方程组,其解很难用解析的方法求出,必须采用数值计算技术.三、确定s R 和f R 的数值计算技术如前所述、方程(C.1.9)和(C.1.10)是以s R 和f R 为未知数的两个二元二次方程组,每个方程式在(s R 和f R )直角坐标系中对应着一条二次曲线,两条二次曲线交点的坐标值即为这个联立方程组的解.这个解可以利用叠代法求得.由于在0=s R 处与式(C.1.10)对应的曲线对f R 轴的截距较式(C.1.9)对应的曲线的截距大(由数值计算结果可以证明),因此为了使叠代运算收敛,首图C.1.2电压-温度特性及非线形误差C先令0=s R 代入式(C.1.10),由式(C.1.10)求出一个f R 值,然后把这一f R 值代入式(C.1.9),并由式(C.1.9)求出一个新的s R 值,再代入式(C.1.10)…创此反复叠代,直到在一定的精度范围内可认为相邻两次算出的s R 和f R 值相等为止.四、非线性误差的理论分析热敏元件电阻一温度曲线测定后和a V 、3V 及电路参数确定后,传感器由式(C.1.7)所表达的电压一温度特性的函数关系()t V o 就完全确定了,虽然在电路参数的选择上保证了与1t 、2t 和3t 对应的三个测量点在(o V 、t )平面上落在通过原点的同一直线上,但在整个测温范围内,式(C.1.7)所表达的电压一温度特性不是一条直线,而是一条如图C.1.2所示的S 形曲线.在此情形下,若在传感器的输出端用刻度特性均匀的电压表头来显示温度值,就相当于用上述直线关系代替式(C.1.7)所表达的曲线关系.除1t 、2t 和3t 三个温度值外,对于其余各点,这一替代均存在着由于传感器电压一温度特性的非线性引起的误差,根据图C.1.2所示的关系,在理论上计算这一误差的公式可以写成如下形式:()⎥⎦⎤⎢⎣⎡+--∆1313t t V V t t tt o (C.1.11)上式中t 是传感器探头所在环境的实际温度值,右边第二项(方括弧中的算式)代表具有均匀刻度特性的电压表头显示的温度值t ',其中()t V o 是由实际温度按式(C.1.7)算出的传感器的输出电压.实验过程本实验的主要设备是TS —B 型温度传感技术实验仪,其电路原理图如图C.1.3所示,使用方法见该仪器的使用说明书.该仪器配上数字万用表、恒温电磁搅拌器、盛有变压器油的烧杯和水银温度计等简单器具就可方便地进行下面各项内容的实验:1.热敏电阻元件电阻一温度特性的测定该项测量是设计本温度传感器的基础,要求测量结果在测量器具允许误差范围内尽量准确,为此在测量过程中应特别仔细、认真,尽量减少人为因素的影响.测量时把热敏电阻固靠在C 100~0︒水银温度计的头部后,把温度计及热敏元件浸入盛有变压器油的烧杯内,并用恒温电磁搅拌器加热变压器油.在C 75~25︒的温度范围内,从C 25︒开始,每隔C 5︒用数字万用表测量这些温度下热敏电阻的阻值,直到C 75︒止.为了使测量结果更为准确,可在升温过程和降温过程中各测一次,然后取平均.升温时,升温速度不宜过快.该项测定完成后,采用直线拟合方法处理实验数据,求出式(C.1.1)所表示的热敏电阻的电阻一温度特性中的材料常量n B 的实验值.2.选择和计算电路参数首先根据实验测得的热敏电阻的电阻一温度特性曲线和两种测温范围(C 45~25︒和C 65~25︒),按前面所论述的原则确定1R 、2R 、3R 、a V 和3V 然后把式(C.1.9)和式(C.1.10)改写成以下标准形式:02=++C BR AR s s (A ,B ,C 中含f R ) (C.1.9’) 02='+'+'C R B R A f f (A ',B ',C '中含s R ) (C.1.10’) 并用叠代法计算电路参数s R 和f R ;然后,按式(C.1.7)和式(C.1.11)计算以上两种测温范围情况下传感器的电压一温度特性及非线性误差的理论值(计算程序自编).3.温度传感器的组装与调试首先调节设置在TS —B 型温度传感技术实验仪后面板上的多圈电阻器,使s R 和f R 的值为计算结果值(具体调节方法见TS —B 型温度传感技术实验仪使用说明书);然后调节传感器零点和校准量程,具体操作如下.(1)零点调节调节图C.1.3所示电路中的1w (对应TS —B 型温度传感技术实验仪前面板上的“a V 调节”旋钮)使传感器的输入桥式电路的电源电压a V 为设计时的选定值,然后用ZX21型电阻箱代替热敏元件t R 接入传感器电路,并把电阻箱的阻值调至1t R (即热敏元件在1t 时的阻图C.1.3 TS-B 型温度传感技术实验仪电路原理图值),用数字万用表mV 200档观测传感器的输出电压o V 是否为零,若不为零,调节图C.1.3中的1R (对应仪器前面板上的“调零旋钮”)使o V 值为零(允许mV 1±的误差).(2)量程校准完成零点调节后,把代替热敏电阻的电阻箱阻值调至3t R (即热敏元件在3t 时的阻值),用数字万用表观测传感器输出电压o V 是否为设计时所要求的3V 值.如果不是,再次调节1w 改变电桥电源电压a V ,使 3V V o =.在完成以上调节工作后,注意保持“零点调节”和“a V 调节”旋钮位置不变.4.传感器电压一温度特性的测定把测温范围分成10个等间隔的子温区,加热变压器油,当温度计示值低于3t 约C 5︒时就停止加热(但不停止搅拌),由于加热器有余热,变压器油的温度会继续升高,当温度计示值高于3t 的某一最高温度后,变压器油便处于降温状态.在降温过程中,测量和记录下以上各子温区交界点温度对应的传感器输出电压o V 值,并与按式(C.1.7)计算的理论值列表进行比较.5.温度的数字显示为了用数字万用表的mV 200挡实现起始温度1t 及测温范围 31~t t 内温度传感器温度的数字显示,在mV 200数字表头和图C.1.3所示的温度一电压变换电路之间需设置一个处理电路,试根据模拟电子线路理论自行设计一个具有这种功能的处理电路并拟定出相应的调试步骤.数据处理1.根据实验数据在直角坐标纸上绘出t R 的电阻一温度特性曲线;并在同一坐标纸上绘出根据实验求出的n B 值由式(C.1.1)表示的特性曲线.2.就某一测温范围的传感器,在同一直角坐标系中绘出电压一温度特性的理论计算曲线和实验测定曲线.3.列表比较两种不同测温范围的传感器非线性误差随温度变化的理论值与实测值.4.对实验结果进行分析、讨论和评定.思考题1.用叠代法计算s R 和f R 时,若先给f R 赋值,计算过程将如何发展?2.在调节温度传感器的零点和量程时,为什么要先调节零点,后调节量 程? 参考文献1 牛德芳.半导体传感器原理及应用.大连:大连理工大学出版社, 1993上文已完。
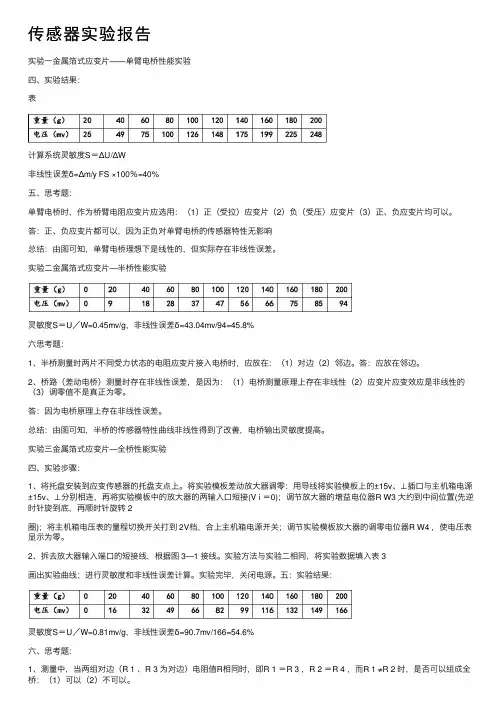
传感器实验报告实验⼀⾦属箔式应变⽚――单臂电桥性能实验四、实验结果:表计算系统灵敏度S=ΔU/ΔW⾮线性误差δ=Δm/y FS ×100%=40%五、思考题:单臂电桥时,作为桥臂电阻应变⽚应选⽤:(1)正(受拉)应变⽚(2)负(受压)应变⽚(3)正、负应变⽚均可以。
答:正、负应变⽚都可以,因为正负对单臂电桥的传感器特性⽆影响总结:由图可知,单臂电桥理想下是线性的,但实际存在⾮线性误差。
实验⼆⾦属箔式应变⽚—半桥性能实验灵敏度S=U/W=0.45mv/g,⾮线性误差δ=43.04mv/94=45.8%六思考题:1、半桥测量时两⽚不同受⼒状态的电阻应变⽚接⼊电桥时,应放在:(1)对边(2)邻边。
答:应放在邻边。
2、桥路(差动电桥)测量时存在⾮线性误差,是因为:(1)电桥测量原理上存在⾮线性(2)应变⽚应变效应是⾮线性的(3)调零值不是真正为零。
答:因为电桥原理上存在⾮线性误差。
总结:由图可知,半桥的传感器特性曲线⾮线性得到了改善,电桥输出灵敏度提⾼。
实验三⾦属箔式应变⽚—全桥性能实验四、实验步骤:1、将托盘安装到应变传感器的托盘⽀点上。
将实验模板差动放⼤器调零:⽤导线将实验模板上的±15v、⊥插⼝与主机箱电源±15v、⊥分别相连,再将实验模板中的放⼤器的两输⼊⼝短接(V i =0);调节放⼤器的增益电位器R W3 ⼤约到中间位置(先逆时针旋到底,再顺时针旋转 2圈);将主机箱电压表的量程切换开关打到 2V档,合上主机箱电源开关;调节实验模板放⼤器的调零电位器R W4 ,使电压表显⽰为零。
2、拆去放⼤器输⼊端⼝的短接线,根据图 3—1 接线。
实验⽅法与实验⼆相同,将实验数据填⼊表 3画出实验曲线;进⾏灵敏度和⾮线性误差计算。
实验完毕,关闭电源。
五:实验结果:灵敏度S=U/W=0.81mv/g,⾮线性误差δ=90.7mv/166=54.6%六、思考题:1、测量中,当两组对边(R 1 、R 3 为对边)电阻值R相同时,即R 1 =R 3 ,R 2 =R 4 ,⽽R 1 ≠R 2 时,是否可以组成全桥:(1)可以(2)不可以。
1. 非线性误差磁电式传感器产生非线性误差的主要原因是: 由于传感器线圈内有电流I 流过时, 将产生一定的交变磁通ΦI, 此交变磁通叠加在永久磁铁所产生的工作磁通上, 使恒定的气隙磁通变化如图7 - 3所示。
当传感器线圈相对于永久磁铁磁场的运动速度增大时, 将产生较大的感生电势E 和较大的电流I, 由此而产生的附加磁场方向与原工作磁场方向相反, 减弱了工作磁场的作用, 从而使得传感器的灵敏度随着被测速度的增大而降低。
当线圈的运动速度与图7 - 3所示方向相反时, 感生电势E 、 线圈感应电流反向, 所产生的附加磁场方向与工作磁场同向, 从而增大了传感器的灵敏度。
其结果是线圈运动速度方向不同时, 传感器的灵敏度具有不同的数值, 使传感器输出基波能量降低, 谐波能量增加。
即这种非线性特性同时伴随着传感器输出的谐波失真。
显然,传感器灵敏度越高, 线圈中电流越大, 这种非线性越严重。
为补偿上述附加磁场干扰, 可在传感器中加入补偿线圈, 如图7 - 2(a )所示。
补偿线圈通以经放大K 倍的电流, 适当选择补偿线圈参数, 可使其产生的交变磁通与传感线圈本身所产生的交变磁通互相抵消, 从而达到补偿的目的。
7.2 霍尔式传感器霍尔传感器是基于霍尔效应的一种传感器。
1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应, 但由于金属材料的霍尔效应太弱而没有得到应用。
随着半导体技术的发展, 开始用半导体材料制成霍尔元件, 由于它的霍尔效应显著而得到应用和发展。
霍尔传感器广泛用于电磁测量、压力、加速度、振动等方面的测量。
一、 霍尔效应及霍尔元件二、 1. 霍尔效应置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势, 这种现象称霍尔效应。
该电势称霍尔电势。
图 7 - 8 所示, 在垂直于外磁场B 的方向上放置一导电板, 导电板通以电流I, 方向如图所示。
基于神经网络的传感器非线性误差校正方法樊润洁;朱亚男【摘要】为对传感器进行非线性校正以进一步提高其测量精度,提出了基于神经网络的校正办法。
理论分析了传感器非线性误差的复杂性,并以位移传感器标定为例,详细介绍了传感器非线性校正的过程和方法。
采用了最小二乘拟合、BP神经网络以及RBF网络三种方法进行校正,设计并实现了RBF网络的校正模型。
实验结果证明,RBF网络的校正方法比BP网络校正方法精度提高了约44%,其补偿效果更优,且其在传感器种类变化或环境影响较大的情况下比最小二乘拟合更具非线性补偿优势。
%In order to further improve measurement accuracy of sensor, a non-linear errors correction method for the sensors based on neural network be proposed. Theoretical analysis of the complexity of the sensor nonlinearity error, took example as displacement sensor calibration, introduced the details of the non-linear sensor calibration process and methods. Three methods including Least Squares, BP Neural Network and RBF Network have been used for errors correcting, designed and implemented a calibration model of RBF Network, and the results shows that the accuracy of RBF Network has been increased by about 44%than the accuracy of BP Network, and it has more nonlinear compensation advantage than the Least Squares in complex environment and various types of multi-sensor application.【期刊名称】《电子设计工程》【年(卷),期】2014(000)023【总页数】4页(P56-59)【关键词】神经网络;BP网络;RBF网络;最小二乘法;非线性校正【作者】樊润洁;朱亚男【作者单位】西安铁路职业技术学院陕西西安 710014;西安铁路职业技术学院陕西西安 710014【正文语种】中文【中图分类】TP212传感器作为测控系统的感知器件,在测控系统中占有举足轻重的地位。
基于多元回归算法的激光位移传感器非线性误差建模和补偿1 引言激光位移传感器具有量程大、精度高、抗干扰性强等优势。
根据测量原理不同,通常激光传感器可分为三角测量法和激光回波式。
其中,三角测量法具有更高的测量精度,非常适合于各种工业现场大范围、高精度位移测量的需求。
由于三角测量法激光位移传感器测量原理的限制,非线性误差成为影响激光位移传感器精度的主要因素。
如基恩士IL-600型激光位移传感器,其重复定位精度仅50μm,但非线性误差高达1~2mm。
考虑到激光位移传感器的非线性误差具有明显的系统误差特征,可采用补偿的方式对非线性误差进行修正。
具体方法:将被测物安装在标准位移台上,利用激光位移传感器对被测物进行测量,在被测物运动至不同的已知标准位移位置时,读取激光位移传感器的输出并计算非线性误差,进而通过测量数据建立非线性误差和传感器输出之间的数学模型,根据模型计算出传感器不同输出时的非线性误差,并对输出误差进行补偿。
非线性误差补偿的核心在于准确的非线性误差模型,激光位移传感器的非线性误差需要通过校准的方式进行建模,而校准的实质也是对非线性误差测量数据的统计分析。
因此,选择合适的建模算法非常重要。
多元回归是常用的建模算法,此算法通常被用于建立输入和输出之间的线性相关模型,但通过在模型中引入高次项,也可以实现非线性相关模型的建立。
因此,本文选用多元回归结合引入高次项的方式对非线性误差进行建模。
2 三角测量法激光位移传感器非线性误差分析在进行位移测量时,三角测量法激光位移传感器会发出激光照射在被测物表面上,进而反射光线经过透镜聚焦后打在感光片上形成光斑;当被测物发生位移后,感光片通过感应光斑的位移计算出被测物的位移。
基于此原理,对激光位移传感器的非线性误差和热误差的成因进行了定性分析。
图1为三角测量法激光位移传感器的测量原理图。
理想情况下,激光器发出的光线会垂直照射在被测物表面,经过被测物表面漫反射,一部分光线经过透镜的聚焦汇聚在感光片上,感光片一般为线性CCD 或CMOS阵列,能够感知光斑的位移,进而计算出被测物的位移量。
1. 非线性误差磁电式传感器产生非线性误差的主要原因是:由于传感器线圈内有电流I流过时,将产生一定的交变磁通①I,此交变磁通叠加在永久磁铁所产生的工作磁通上,使恒定的气隙磁通变化如图7 - 3所示。
当传感器线圈相对于永久磁铁磁场的运动速度增大时,将产生较大的感生电势E和较大的电流I,由此而产生的附加磁场方向与原工作磁场方向相反,减弱了工作磁场的作用,从而使得传感器的灵敏度随着被测速度的增大而降低。
当线圈的运动速度与图7 - 3所示方向相反时,感生电势E、线圈感应电流反向,所产生的附加磁场方向与工作磁场同向,从而增大了传感器的灵敏度。
其结果是线圈运动速度方向不同时,传感器的灵敏度具有不同的数值,使传感器输出基波能量降低,谐波能量增加。
即这种非线性特性同时伴随着传感器输出的谐波失真。
显然,传感器灵敏度越高,线圈中电流越大,这种非线性越严重。
为补偿上述附加磁场干扰,可在传感器中加入补偿线圈,如图7 - 2 (a)所示。
补偿线圈通以经放大K倍的电流,适当选择补偿线圈参数,可使其产生的交变磁通与传感线圈本身所产生的交变磁通互相抵消,从而达到补偿的目的。
7.2 霍尔式传感器霍尔传感器是基于霍尔效应的一种传感器。
1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应,但由于金属材料的霍尔效应太弱而没有得到应用。
随着半导体技术的发展,开始用半导体材料制成霍尔元件,由于它的霍尔效应显著而得到应用和发展。
霍尔传感器广泛用于电磁测量、压力、加速度、振动等方面的测量。
一、霍尔效应及霍尔元件二、 1.霍尔效应置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上平行于电流和磁场方向上的两个面之间产生电动势,这种现象称霍尔效应。
该电势称霍尔电势。
图7 - 8所示,在垂直于外磁场B的方向上放置一导电板,导电板通以电流I,方向如图所示。
导电板中的电流是金属中自由电子在电场作用下的定向运动。
此时,每个电子受洛仑磁力fm的作用,fm大小为fm =eBv式中:e——电子电荷;v――电子运动平均速度;B ――磁场的磁感应强度。
第一章3.r m =2/50×100%=4% , 因为 r m =Δx m /x ≤a%*x n /x=5% 所以,合格σ=0.1046x=x ±3σ=1.56±0.3138 1.2462<x<1.8738 , 无坏值 9.拟合后:y=0.499x+1.02×100%=0.133%K=0.499第二章传感器第二章习题参考答案3. 金属电阻应变片,其灵敏度S=2.5,R =120Ω,设工作时其应变为1200μe ,问ΔR 是多少?若将此应变片与2V 直流电源组成回路,试求无应变时和有应变时回路的电流各是多少? 解:无应变时 I=E/R=2/120=16.7mA有应变时: I=E/(R+ΔR)=2/(120+0.36)=16.6mA4应变片称重传感器,其弹性体为圆柱体,直径D=100mm,材料弹性模量E=205*10^9 N/M^2,用它称500KN 的物体,若用电阻丝式应变片,应变片的灵敏系数K=2,R=120欧姆,问电阻变化多少?7 拟在等截面的悬臂梁上粘贴四个完全相同的电阻应变片,并组成差动全桥电路,试问: ( 1 ) 四个应变片应怎样粘贴在悬臂梁上? ( 2 ) 画出相应的电桥电路图。
答:① 如题图所示 等截面悬梁臂,在外力F 作用下,悬梁臂产生变形,梁的上表面受到拉应变,而梁的下表面受压应变。
当选用四个完全相同的电阻应变片组成差动全桥电路,则应变片如题图(b )所示粘贴。
图(a )图(b )② 电阻应变片所构成的差动全桥电路接线如图﹙c﹚所示,R 1、R 4所受应变方向相同,R 2、R 3所受应变方向相同,但与R 1、R 4所受应变方向相反。
图(c )8. 图示为一直流应变电桥。
图中E=4V ,R 1=R 2 =R 3=R 4=120Ω,试求:(1)R 1为金属应变片,其余为外接电阻。
当R 1的增量为∆ R 1 =1. 2 Ω时,电桥输出电压U 0=?(2)R 1,R 2都是应变片,且批号相同,感应应变的极性和大小都相同,其余为外接电阻,电桥输出电压U 0 = ?(3)题(2)中,如果R2与R1感受应变的极性相反,且∆R1=∆R2=1. 2 Ω,电桥输出电压U 0 = ?答: ① 如题 2.1 图所示图2.11014 1.20.01V 44120R E U R ∆=-⋅=-⨯=- ② 由于R 1, R 2均为应变片,且批号相同,所受应变大小和方向均相同,则 R 1=R 2=R , ∆R 1=∆R 2=∆R 。
学生:XXX 学号:XXXXXXXXXXX传感器的非线性误差仪器仪表等测量工具的输入、输出(测量、结果)分别作为直角坐标系的纵轴、横轴,选择适合的坐标轴,并将理想的输入输出对应点标入坐标,可以得到一条理想输入输出关系曲线。
将实际的输入输出对应点标入坐标,可以得到一条实际输入输出关系曲线。
最理想的情况下这两条曲线应该重合,实际上是不可能做到的,这时两条曲线之间的距离就是非线性误差。
一、输入输出曲线的拟合方式:1)直线拟合:直线拟合大致想到以下几种方式:1.以最大△y值判断最佳拟合直线:由于只需要在传感器工作范围内拟合,故只在其工作范围内进行输入输出直线的拟合。
用直线段在其范围内对其拟合,每段拟合直线段都将对应得到一个最大△y值,拟合直线不同,各自最大△y值也不同。
其中最大△y值最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2.以最小二乘法的方式得到最佳拟合直线:以最小二乘方式拟合即为用其误差的平方和判断。
在传感器工作范围内,用直线段对其进行拟合,每段拟合直线段都将对应得到一个误差的平方和值,拟合直线不同,各自误差的平方和也不同。
其中误差的平方和最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2)离散的方式拟合:用阶梯型的曲线在工作范围内对其进行拟合。
每两个阶梯之间的距离即为所用硬件计算的最小时间(或最小时间的2N倍),则最大误差△y由硬件的运算速度决定。
二、常用的非线性传感器的误差补偿方法:非线性传感器的误差补偿方法从硬件方面讲,有补偿电路;从软件方面讲,有神经网络法、数据融合法等;此外也有将软件硬件技术结合起来的方法。
1)硬件补偿:采用传感器电桥电路非线性误差的反馈补偿法。
对于大多数应用电桥电路的传感器,如电阻式温度计、压力传感器等,必须测出电桥中一个或两个桥臂电阻的变化量,即传感器电阻的变化量,作为衡量被测物理量的大小,使传感器具有线性特性。
由于电桥输出电压与桥臂电阻之间存在非线性关系,如图1所示,电桥输出电压与传感器变化量成非线性关系。
学生:XXX 学号:XXXXXXXXXXX
传感器的非线性误差
仪器仪表等测量工具的输入、输出(测量、结果)分别作为直角坐标系的纵轴、横轴,选择适合的坐标轴,并将理想的输入输出对应点标入坐标,可以得到一条理想输入输出关系曲线。
将实际的输入输出对应点标入坐标,可以得到一条实际输入输出关系曲线。
最理想的情况下这两条曲线应该重合,实际上是不可能做到的,这时两条曲线之间的距离就是非线性误差。
一、输入输出曲线的拟合方式:
1)直线拟合:
直线拟合大致想到以下几种方式:
1.以最大△y值判断最佳拟合直线:
由于只需要在传感器工作范围内拟合,故只在其工作范围内进行输入输出直线的拟合。
用直线段在其范围内对其拟合,每段拟合直线段都将对应得到一个最大△y值,拟合直线不同,各自最大△y值也不同。
其中最大△y值最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2.以最小二乘法的方式得到最佳拟合直线:
以最小二乘方式拟合即为用其误差的平方和判断。
在传感器工作范围内,用直线段对其进行拟合,每段拟合直线段都将对应得到一个误差的平方和值,拟合直线不同,各自误差的平方和也不同。
其中误差的平方和最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2)离散的方式拟合:
用阶梯型的曲线在工作范围内对其进行拟合。
每两个阶梯之间的距离即为所用硬件计算的最小时间(或最小时间的2N倍),则最大误差△y由硬件的运算速度决定。
二、常用的非线性传感器的误差补偿方法:
非线性传感器的误差补偿方法从硬件方面讲,有补偿电路;从软件方面讲,有神经网络法、数据融合法等;此外也有将软件硬件技术结合起来的方法。
1)硬件补偿:
采用传感器电桥电路非线性误差的反馈补偿法。
对于大多数应用电桥电路的传感器,如电阻式温度计、压力传感器等,必须测出电桥中一个或两个桥臂电阻的变化量,即传感器电阻的变化量,作为衡量被测物理量的大小,使传感器具有线性特性。
由于电桥输出电压与桥臂电阻之间存在非线性关系,如图1所示,电桥输出电压与传感器变化量成非线性关系。
为获得线性输出,需进行非线性修正,即线性化处理。
可用硬件修正,也可用软件修正。
图1
硬件方面考虑采用反馈技术来影响传感器电桥输入电源电压,修正输出电压和传感器电阻之间的非线性关系。
原理电路如图2所示,放大器的输出电压。
加到A/D转换器,另一方面通过反馈元件,取出一部份作为激励源的输入,
激励源在参考电压和作用下,输出电压作为电桥电源电压,从而实现电桥电源电压的改变,达到修正电桥非线性的目的。
通过计算得到:
(1)
即放大器的增益G和反馈系数β的乘积等于2就可消除非线性误差。
公式推导时认为传感器具有线性,若传感器本身具有非线性,只要找出传感器特性的拟合
方程,从而建立电桥输出电压和传感器变量之间的数学关系,同时可消除报告传感器非线性在内的非线性误差。
图2 修正原理图
二、软件方面:用神经网络拟合的传感器逆特性,通过传感器的逆特性将传感器非线性特性改造成与实际物理过程相一致的不失真的线性特性,从而减小非线性误差。
采用一种单输入单输出的模糊小脑神经网络( FCMAC)误差补偿方法, 具有收敛速度快、算法简单和补偿直接输出的特点。
在测量系统中,被测对象输入的物理量与系统输出的观测值可表示为,f(μ)一个非线性函数,要提高测量系统的精度就必须进行非线性补偿。
补偿的方法是在测量系统中串联一个补偿环节如图3所示,使得非线性的传感特性被线性化。
该补偿环节是传感特性函数f(μ)的反函数,通过函数合成
(2)
得到测量系统输出值z 。
图3 非线性补偿的测量系统
用FCMAC 对传感器进行误差补偿分为两步:
1)网络学习:在传感器的测量范围内随机抽取n 个
以及相应输出值
,对进行模糊量化。
随机产生一组网络初始权值,
以每个为FCAMC 的输入值,按照式
(3)
计算出实际输出,再以为FCMAC 的希望输出,按照式
(4)训练FCMAC的权值,直到结束,网络完成对的逼近。
2)误差补偿:实际测量的物理量,经过传感器转换后输出为,再经过神经网络后,由式(3)计算出实际输出
,实现传感器非线性误差补偿。