15路输入12路输出继电器可编程模块产品使用说明介绍
- 格式:pdf
- 大小:2.51 MB
- 文档页数:46
多功能电力仪表用户手册适用型号:PD194Z-3SY安全须知感谢您选择江苏斯菲尔电气股份有限公司研发的产品,为了方便您选购和安全、正确、高效的使用本产品,请仔细阅读本手册并在使用时务必注意以下几点。
注意CAUTION:◆该装置必须有专业人员进行安装与检修◆在对该装置进行任何内部或外部操作前、必须切断输入信号和电源◆始终使用合适的电压检测装置来确定仪表各部位无电压◆提供给该装置的电参数需在额定范围内下述情况会导致装置损坏或装置工作的异常:◆辅助电源电压超范围◆配电系统频率超范围◆电流或电压输入极性不正确◆带电拨通信插头◆未按要求连接端子连线本手册可以在本公司的主页上下载到最新版本,同时也提供一些相应的测试软件下载。
如果您需要电子版用户手册可以向本公司的技术服务部门索取。
2目录1产品简介 (1)1.1概述 (1)1.2选型 (1)2技术规格 (2)2.1技术参数 (2)2.2测量参数 (4)3安装与接线 (5)3.1尺寸 (5)3.2安装方法 (6)3.3接线 (6)3.4接线 (7)4操作 (9)4.1面板 (9)4.2显示 (10)4.2.1电量显示 (10)4.2.2电能显示 (13)4.2.3编程设置 (16)4.3编程操作方法 (21)4.3.1系统设置 (22)4.3.2输入设置 (23)4.3.3通信设置 (24)4.3.4报警设置 (25)4.3.5模拟量输出设置 (26)5功能 (27)5.1需量记录 (27)5.2电能脉冲输出 (27)5.3开关量输入 (28)5.4继电器输出 (28)35.5模拟量输出 (29)6通信 (31)6.1物理层 (31)6.2通信协议MODBUS-RTU (31)6.3报文指令格式 (32)6.4数据格式 (38)附录MODBUS-RTU通信寄存器信息表 (39)一次电网数据 (39)二次电网数据 (40)极值需量数据 (43)生产信息 (45)参数设置 (45)41产品简介1.1概述PD194Z-3SY多功能电力仪表是针对电力智能监控和电能计量需求设计,能测量三相电网中的常用电力参数,三相电压、电流、功率、功率因数、频率、电能、复费率电能、需量等。
使用说明书Intelligent programmable central control system 在使用产品前,请详细阅读本说明书;另外请保管好本说明书重要说明为确保设备可靠使用及人员的安全,在安装、使用和维护时,请遵守以下事项:请使用带保护地的单相三线制电源,并确保整个系统使用同一保护地,中控主机的最终接地点应连接至真地,其接地电阻应小于1 欧姆。
不能使用无保护地的电源,电源线的接地脚不能破坏。
无完善的接地,容易造成信号干扰、不稳定,还可能因漏电引起人身事故;请勿使用两芯插头,确保设备的输入电源为220V/50Hz 的交流电。
请勿在下列场所使用本产品:有灰尘、油烟、导电性尘埃、腐蚀性气体、可燃性气体的场所;暴露于高温、结露、风雨的场合;有振动、冲击的场合。
电击、火灾、误操作也会导致产品损坏和恶化;在进行螺丝孔加工和接线时,不要使金属屑和电线头掉入控制器的通风孔内,这有可能引起火灾、故障、误操作;产品在安装工作结束,需要保证通风面上没有异物,包括防尘纸等包装物品,否则可能导致运行时散热不畅,引起火灾、故障、误操作;避免带电状态进行接线、插拔电缆插头,否则容易导致电击,或导致电路损坏;安装和接线必须牢固可靠,接触不良可能导致误操作;对于在干扰严重的应用场合,高频信号的输入或输出电缆应选用屏蔽电缆,以提高系统的抗干扰性能。
必须将外部电源全部切断后,才能进行安装、接线等操作,否则可能引起触电或设备损坏;在安装布线完毕,立即清除异物,通电前请盖好产品的端子盖板,避免引起触电;请勿在通电时触摸端子,否则可能引起电击、误操作;请在关闭电源后进行清扫和端子的旋紧工作,通电时,进行这些操作有可能引起触电和机器损坏;请在关闭电源后进行通讯信号电缆的连接或拆除、扩展模块或控制单元的电缆连接或拆除等操作,否则可能引起设备损坏、误操作;请勿拆卸设备,避免损坏内部电气元件;产品报废时,请按工业废弃物进行处理,或者按当地的环境保护规定处理;遇到问题,请先详细参阅本说明,如不能解决,请联系我们。
TYLCU-SS8机车逻辑控制装置使用说明书深圳市通业科技发展有限公司二零零三年二月前言 (1)一、概述 (2)二、装置构成 (2)三、主要技术参数 (3)四、工作原理 (4)五、安装与使用 (6)六、TYLCU工作状态说明 (8)附图1、逻辑关系梯形图 (144)附表2:TYLCU对外插座连接定义 (25)本产品在出厂前已经过严格检查。
TYLCU装置购入后,请检查本产品是否因运输不慎而造成损伤;产品的规格、型号是否与订购产品的机种相符;有无合格标志等。
如有问题,请与本公司或供应商联系。
本产品的保修期依照标书约定。
若由于下述原因引起的故障,不属于保修范围:●不正确的操作或未经允许自行修理及改造所引起的问题。
●超出标准规范或未经允许自行修理及改造所引起的问题。
●购买后跌损、野蛮搬运、未按本说明书要求使用造成的问题。
●因环境不良所引起的器件老化或故障。
●为确保设备的良好运行,禁止非专业人员随意打开机箱。
专业人员进行维修时要注意确保人身安全。
一、概述TYLCU-SS(TongY e Logical Control Unit for ShaoShan)系列机车逻辑控制装置是专为国产韶山系列电力机车设计开发的、用于电力机车整车逻辑控制的新一代智能型逻辑控制装置。
旨在取代原有机车直流110V有触点控制电路,取代机车上原有的时间继电器,中间继电器等低压电器及大量的迂回电路,并预留与机车微机网络的通讯。
TYLCU-SS机车逻辑控制装置结合了世界先进的现代电子和计算机技术,采用了内嵌单片机系统的大规模可编程逻辑阵列结构及CAN总线技术,整个组合逻辑固化软件来实现基本控制功能,提高系统运行的可靠性。
TYLCU-SS系列机车逻辑控制装置的设计符合TB/T1394-93《铁路机车动车电子装置》的要求,结合了通用PLC的特点和电力机车的具体运行环境。
机车逻辑控制装置的使用将改变原有机车控制部分设计变更困难、调试烦琐、布线混乱、可靠性低的现象,实现电力机车逻辑控制的集成化和智能化。
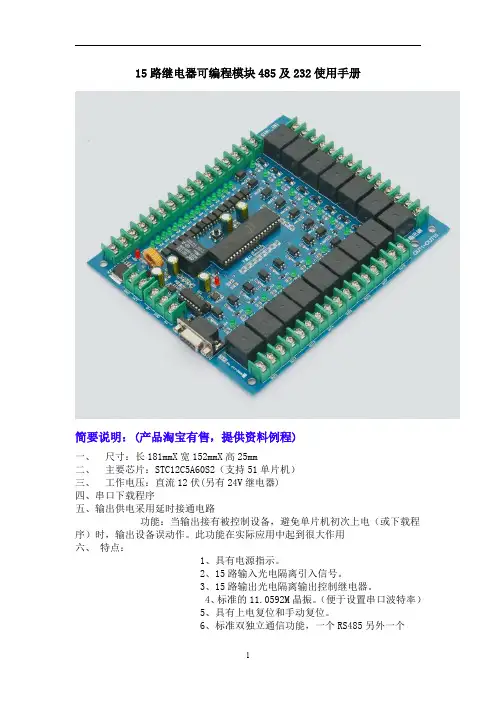
15路继电器可编程模块485及232使用手册简要说明:(产品淘宝有售,提供资料例程)一、尺寸:长181mmX宽152mmX高25mm二、主要芯片:STC12C5A60S2(支持51单片机)三、工作电压:直流12伏(另有24V继电器)四、串口下载程序五、输出供电采用延时接通电路功能:当输出接有被控制设备,避免单片机初次上电(或下载程序)时,输出设备误动作。
此功能在实际应用中起到很大作用六、特点:1、具有电源指示。
2、15路输入光电隔离引入信号。
3、15路输出光电隔离输出控制继电器。
4、标准的11.0592M晶振。
(便于设置串口波特率)5、具有上电复位和手动复位。
6、标准双独立通信功能,一个RS485另外一个RS232。
7、带有掉电存储功能,该单片机内部集成。
8、输入15路具有LED指示。
9、输出15路具有LED指示。
10、15路12V继电器控制,控制设备。
11、可控制交流220V/10A一下设备。
12、具有双通信功能(可以上位机控制)。
13、单片机无加密,可插拔更换,带有程序下载口,可随意更改程序。
使用说明:【标注说明】【接线图】【应用举例】【可以作为输入设备的产品】【可作为输出控制的设备】【原理图】由于原理图比较大,购买后提供PDF格式的。
【PCB图】【上位机控制界面】【测试程序】实现功能:STC12C5A60S2单片机之测试程序使用芯片:STC12C5A60S2晶振:11.0592MHZ波特率:115200编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/#include"STC12C5A60S2.H"#include"INTRINS.H"#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int//宏定义无符号整型bit write=0;//写的标志;uchar dat=0xee;//用于存储单片机接收发送缓冲寄存器SBUF里面的内容uchar sj1;//存储数据值uchar sj2;//存储数据值uchar sj3;//存储数据值/*sfr IAP_DATA=0xC2;sfr IAP_ADDRH=0xC3;sfr IAP_ADDRL=0xC4;sfr IAP_CMD=0xC5;sfr IAP_TRIG=0xC6;sfr IAP_CONTR=0xC7;sfr P4=0xC0;*///定义Flash操作等待时间及允许IAP/ISP/EEPROM操作的常数//#define ENABLE_ISP0x80//系统工作时钟<30MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x81//系统工作时钟<24MHz时,对IAP_CONTR寄存器设置此值#define ENABLE_ISP0x82//系统工作时钟<20MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x83//系统工作时钟<12MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x84//系统工作时钟<6MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x85//系统工作时钟<3MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x86//系统工作时钟<2MHz时,对IAP_CONTR寄存器设置此值//#define ENABLE_ISP0x87//系统工作时钟<1MHz时,对IAP_CONTR寄存器设置此值初始定义*********************************************************************//*定义输入口*/sbit IN1=P1^0;sbit IN2=P1^1;sbit IN3=P1^4;sbit IN4=P1^5;sbit IN5=P1^6;sbit IN6=P1^7;sbit IN7=P3^2;sbit IN8=P3^3;sbit IN9=P3^4;sbit IN10=P3^5;sbit IN11=P3^6;sbit IN12=P3^7;sbit IN13=P2^2;sbit IN14=P2^1;sbit IN15=P2^0;/*定义输出口*/sbit OUT1=P2^3;sbit OUT2=P2^4;sbit OUT3=P2^5;sbit OUT4=P2^6;sbit OUT5=P2^7;sbit OUT6=P4^4;sbit OUT7=P4^5;sbit OUT8=P0^7;sbit OUT9=P0^6;sbit OUT10=P0^5;sbit OUT11=P0^4;sbit OUT12=P0^3;sbit OUT13=P0^2;sbit OUT14=P0^1;sbit OUT15=P0^0;/********************************************************************函数声明*********************************************************************/ union union_temp16{uint un_temp16;uchar un_temp8[2];}my_unTemp16;uchar Byte_Read(uint add);//读一字节,调用前需打开IAP功能void Byte_Program(uint add,uchar ch);//字节编程,调用前需打开IAP功能void Sector_Erase(uint add);//擦除扇区void IAP_Disable();//关闭IAP功能void Delay();/********************************************************************延时函数*********************************************************************/ void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{;}}}/********************************************************************功能:串口初始化,波特率9600,方式1*********************************************************************/ void Init_Com(void){TMOD=0x20;PCON=0x00;SCON=0x50;TH1=0xFd;TL1=0xFd;TR1=1;}/********************************************************************全开函数*********************************************************************/ void quankai(){uchar k;k=10;OUT1=0;delay(k);OUT2=0;delay(k);OUT3=0;delay(k);OUT4=0;delay(k);OUT5=0;delay(k);OUT6=0;delay(k);OUT7=0;delay(k);OUT8=0;delay(k);OUT9=0;delay(k);OUT10=0;delay(k);OUT11=0;delay(k);OUT12=0;delay(k);OUT13=0;delay(k);OUT14=0;delay(k);OUT15=0;delay(k);}/********************************************************************全关函数*********************************************************************/ void quanguan(){uchar k;k=10;OUT1=1;delay(k);OUT2=1;delay(k);OUT3=1;delay(k);OUT4=1;delay(k);OUT5=1;delay(k);OUT6=1;delay(k);OUT7=1;delay(k);OUT8=1;delay(k);OUT9=1;delay(k);OUT10=1;delay(k);OUT11=1;delay(k);OUT12=1;delay(k);OUT13=1;delay(k);OUT14=1;delay(k);OUT15=1;delay(k);}/********************************************************************接收数据判断函数*********************************************************************/ chuankou(){switch(dat)//接收数据判断{uchar k;k=10;case'I':quankai();SBUF=dat;dat=0xee;write=1;break;//全开case'i':quanguan();SBUF=dat;dat=0xee;write=1;break;//全关case'A':OUT1=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第一路开case'B':OUT2=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第二路开case'C':OUT3=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第三路开case'D':OUT4=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第四路开case'E':OUT5=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第五路开case'F':OUT6=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第六路开case'G':OUT7=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第七路开case'H':OUT8=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第八路开case'J':OUT9=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第九路开case'K':OUT10=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十路开case'L':OUT11=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十一路开case'M':OUT12=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十二路开case'N':OUT13=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十三路开case'O':OUT14=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十四路开case'P':OUT15=0;delay(k);SBUF=dat;dat=0xee;write=1;break;//第十五路开case'a':OUT1=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第一路关case'b':OUT2=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第二路关case'c':OUT3=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第三路关case'd':OUT4=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第四路关case'e':OUT5=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第五路关case'f':OUT6=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第六路关case'g':OUT7=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第七路关case'h':OUT8=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//第八路关case'j':OUT9=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'k':OUT10=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'l':OUT11=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'm':OUT12=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'n':OUT13=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'o':OUT14=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...case'p':OUT15=1;delay(k);SBUF=dat;dat=0xee;write=1;break;//...default:break;//跳出}}/********************************************************************按键函数*********************************************************************/KEY(){uchar k;k=200;if(IN1==0){delay(k);if(IN1==0){delay(k);OUT1=!OUT1;while(!IN1);delay(k);write=1; }}if(IN2==0){delay(k);if(IN2==0){delay(k);OUT2=!OUT2;while(!IN2);delay(k);write=1; }}if(IN3==0){delay(k);if(IN3==0){delay(k);OUT3=!OUT3;while(!IN3);delay(k);write=1; }}if(IN4==0){delay(k);if(IN4==0){delay(k);OUT4=!OUT4;while(!IN4);delay(k);write=1; }}if(IN5==0){delay(k);if(IN5==0){delay(k);OUT5=!OUT5;while(!IN5);delay(k);write=1; }}if(IN6==0){delay(k);if(IN6==0){delay(k);OUT6=!OUT6;while(!IN6);delay(k);write=1; }}if(IN7==0){delay(k);if(IN7==0){delay(k);OUT7=!OUT7;while(!IN7);delay(k);write=1; }}if(IN8==0){delay(k);if(IN8==0){delay(k);OUT8=!OUT8;while(!IN8);delay(k);write=1; }}if(IN9==0){delay(k);if(IN9==0){delay(k);OUT9=!OUT9;while(!IN9);delay(k);write=1; }}if(IN10==0){delay(k);if(IN10==0){delay(k);OUT10=!OUT10;while(!IN10);delay(k);wr ite=1;}}if(IN11==0){delay(k);if(IN11==0){delay(k);OUT11=!OUT11;while(!IN11);delay(k);wr ite=1;}}if(IN12==0){delay(k);if(IN12==0){delay(k);OUT12=!OUT12;while(!IN12);delay(k);wr ite=1;}}if(IN13==0){delay(k);if(IN13==0){delay(k);OUT13=!OUT13;while(!IN13);delay(k);wr ite=1;}}if(IN14==0){delay(k);if(IN14==0){delay(k);OUT14=!OUT14;while(!IN14);delay(k);wr ite=1;}}if(IN15==0){delay(k);if(IN15==0){delay(k);OUT15=!OUT15;while(!IN15);delay(k);wr ite=1;}}}/********************************************************************主函数*********************************************************************/ void main(void){uint eeprom_address;P4SW|=0x20;//配置P4.5为IO口P4M0|=0x10;//配置P4.4为IO口P4M1|=0x10;Init_Com();//串口初始化eeprom_address=0x01;//将测试起始地址送eeprom_addresssj1=Byte_Read(1);//读EEPROM的值,存到read_eepromsj2=Byte_Read(2);//读EEPROM的值,存到read_eepromsj3=Byte_Read(3);//读EEPROM的值,存到read_eepromP0=sj1;P2=sj2;P4=sj3;while(1){chuankou();//接收数据判断函数if(RI)//扫描判断是否接收到数据,{dat=SBUF;//接收数据SBUF赋与datRI=0;//RI清零。

目录目录前言 (1)1 产品信息 (3)1.1产品解析图 (3)1.2产品尺寸 (3)2 安装指导 (4)2.1 环境要求 (4)2.2 安装位置与空间 (4)2.3安装方法 (4)3 接线与规格 (5)3.1 接线要求 (5)3.2 规格要求 (5)3.3 输入输出端子介绍 (6)3.4输入接线 (7)3.4.1普通输入接线说明 (7)3.4.2 差分输入接线说明 (7)3.4.3 故障输入接线说明 (8)3.5 输出接线 (8)3.5.1 普通/高速晶体管输出接线说明 (8)3.5.2 高速差分输出接线说明 (9)3.5.3 使能输出接线说明 (9)3.6 模拟量输入电路 (9)4 通信指导 (10)5 附录 (11)前言首先感谢您购买使用V5系列可编程控制器!V5系列可编程控制器是结合全球领先的控制算法开发的一款全新产品。
本产品支持点动运动、直线插补、圆弧、3D 圆弧、电子齿轮/凸轮等功能;内嵌大量方便行业功能块,如追剪、飞剪、防空等功能块,使应用变得非常简单;集成同步跟随、全闭环控[2] 定义为4轴输入,作为手摇轮输入或者反馈输入,可接收差分信号输入。
[3] 定义为4轴输出,每个轴包括2组差分输出,可作为AB 相输出,CW/CCW 输出方式或者脉冲加方向方式。
[4]CAN 支持CANopen DS301以及CANopen DS402主站以及从站协议。
安全注意事项:请由专业的操作人员按照正常步骤使用本产品,使用过程中注意以下安全相关的注意事项,否则可能导致对人体的伤害或财产损失。
其中安全注意事项定义如下。
危险:如果操作错误,极有可能会导致死亡或重伤; 警告:如果操作错误,可能会导致死亡或重伤;1 产品信息1.1产品解析图91087654321WHDD11211131.2产品尺寸2 安装指导2.1 环境要求2.2 安装位置与空间1 安装时请注意安装位置,务必水平安装。
2 安装时请务必考虑散热情况,务必保证控制器及其模块距离A>50mm:2.3安装方法本产品V5系列可以采用DIN轨道(DIN46277,宽35mm)安装。
北京德威特电力系统自动化有限公司硬件系列资料DVP – 9521微机母联及备用电源自投保护监控装置使用说明书版本号: 0101北京德威特电力系统自动化有限公司重要提示感谢您使用北京德威特电力系统自动化有限公司的产品。
为了安全、正确、高效地使用本装置,请您务必注意以下重要提示:1) 请仔细阅读本说明书,并按照说明书的规定调整、测试和操作,如有随机资料,请以随机资料为准。
2) 为防止装置损坏,严禁带电插拔装置各插件、触摸印制电路板上的芯片和器件。
3) 请使用合格的测试仪器和设备对装置进行试验和检测。
4) 装置如出现异常或需维修,请及时与本公司服务热线联系,(010)80482861。
编制:张鉴校核:常红旗、罗建平2006.02第一次印刷注:本公司保留对此说明书修改的权利。
如果产品与说明书有不符之处,请您及时与我公司联系,我们将为您提供相应的服务。
北京德威特电力系统自动化有限公司I目录1.装置概述 (1)2.技术数据 (3)3.装置结构说明 (8)3.1结构视图 (8)3.2装置功能原理图 (9)3.3接线端子图及端子接线说明 (10)3.3显示板 (14)3.4电源板插件 (14)3.5处理器板插件 (14)3.6继电器板插件 (15)3.7互感器板插件 (15)3.8背板 (15)4.人机交互 (16)4.1机箱面板说明 (16)4.2菜单树型图 (16)4.3显示说明 (20)◆产品图标 (20)◆主菜单 (20)◆主运行图 (20)◆实时波形 (21)◆二次侧模拟量值 (21)◆谐波含量分析 (23)◆电度量 (23)◆开入量实时状态 (23)◆出口(继电器)实时状态 (23)◆运行状态 (24)II北京德威特电力系统自动化有限公司◆通讯状态 (24)◆开入变位累计 (24)◆脉冲计数 (25)◆遥控操作 (25)◆事故报告 (26)◆保护记录(保护动作) (26)◆事件记录(预告事件) (27)◆故障及投运录波 (28)◆保护定值设置与保护投退 (28)◆开入变位报警条件和方式设置 (29)◆开入电压标准设置 (29)◆出口的配置以及出口接点闭合时间设置 (29)◆开入联动出口设置 (30)◆保护动作出口的设置 (31)◆通讯设置(以太网、485) (31)◆时间修改 (32)◆PT/CT变比及断线启动条件设置 (32)◆修改密码 (33)◆继电器出口试验 (33)◆保护联动试验 (33)5.调试说明 (34)5.1上电显示 (34)5.2开关量的检查 (34)5.3远方(遥控)、就地跳合闸检查 (35)5.4模拟量输入检查及精度调节 (36)5.5保护定值清单 (36)5.6保护出口设置 (38)5.7装置配备的保护 (38)北京德威特电力系统自动化有限公司III5.8各类保护的逻辑及试验方法 (39)5.9连接电度脉冲表 (46)5.10继电器的出口检查 (47)5.11保护出口联动检查 (47)6.通讯部分 (48)6.110M/100M以太网通讯 (48)6.2RS485通讯 (49)7.运行人员注意事项及要求 (51)8.检修及维护 (51)9.DVP-9000系列产品订货说明 (52)IV北京德威特电力系统自动化有限公司1.装置概述DVP-9521适用于6~110kV母线分段开关,由监控和保护两套完全独立的系统组成,实现备用电源自动投入功能及母联速断过流保护,同时具有失压保护、合环选跳保护、过流后加速等功能。
过流继电器gl-15说明书一、产品介绍过流继电器gl-15是一款用于保护电器免受过电流损坏的装置。
它主要用于工业控制系统中,用于监测和控制电路中的电流,当电流超过设定值时,能够自动切断电路,防止设备损坏。
二、使用步骤1.接线:将gl-15过流继电器接入电路中,按照接线图正确连接电源和负载。
2.设定:通过调节旋钮或通过编程方式设定继电器的过电流值。
3.测试:在正常工作条件下使用一段时间,观察继电器是否能正常工作。
三、操作注意事项1.在操作前,请务必熟悉说明书的内容。
2.确保过流继电器接入电路时,电源和负载的连接正确。
3.避免过载和短路情况,以免损坏设备。
4.如发现异常情况,如继电器不动作或动作异常,应立即断开电源,并联系专业人员检修。
四、维护保养1.定期检查过流继电器的外观,确保没有破损和异常。
2.清洁继电器表面,保持清洁干燥的环境。
3.定期更换部件,如弹簧等易损部件。
五、常见问题解答1.问题:过流继电器不动作,为什么?回答:可能是由于过载或短路导致,请检查电路和负载。
2.问题:如何调整过流继电器的设定值?回答:可以通过调节旋钮或通过编程方式进行调整。
请参考产品手册。
六、故障排除指南1.故障:继电器动作异常,为什么?解决方案:可能是由于电路故障或继电器本身故障,请检查电路和更换继电器。
2.故障:继电器无法复位,为什么?解决方案:可能是由于弹簧等部件损坏,请更换部件。
七、安装环境要求1.过流继电器gl-15应安装在干燥、无尘的环境中。
2.避免强烈震动和冲击的环境。
3.安装时请确保过流继电器的箭头标志指向电源方向。
八、安全信息1.过流继电器gl-15具有过电流保护功能,使用前请确保电路中没有过电流。
2.请勿在潮湿或有尘的环境中使用或维修过流继电器。
3.在维修或更换部件时,请务必关闭电源并佩戴安全防护用品。
九、版权声明本说明书版权归[公司名称]所有,未经许可,禁止复制、摘录、转载或销售。
三菱 FX2N 可编程控制器使用手册一、可编程控制器的内部编程元件1、输入继电器 X: X000~X017共16点2、输出继电器 Y: Y 000~Y017共16点3、辅助继电器 M:1)通用辅助继电器M0~M499 共 500 点2)断电保持继电器M500~M3071 共 2572 点3)特殊辅助继电器M8000~M8255 共 256 点4、状态继电器 S:S0~S499共500点1)初始状态继电器S0~S9 共 10 点2)回零状态继电器S10~S19共 10 点,供返回原点用3)通用状态继电器S20~S499共 480点4)断电保持状态继电器S500~S899共400点5)报警用状态继电器S900 ~S999共100点5、定时器 T: T0~T255共256点1)常规定时器 T0 ~ T255共256点T0~ T199为 100ms定时器,共 200 点,其中 T192~T199 为子程序中断服务程序专用的定时器。
T200~T245 为 10ms定时器共 46 点2)积算定时器 T246 ~T255 共 10 点T246~T249 为 1ms积算定时器共4点T250~T255 为 100ms积算定时器共6点6、计算器 C :C0~ C234共235点1)16 位计数器C0 ~ C199共200点其中 C0~C99 为通用型共 100 点C100~C199为断电保持型共100 点2)32 位加 / 减计数器 C200~ C234 共 35 点其中 C200~ C219为通用型共 20 点C220~C234为断电保持型共15 点7、指针 P/I1)分支用指针 P0~P127 共 128 点2)中断用指针 I XXX共 15 点其中输入中断指针 100~ 150 共 6 点定时中断指针 16~18共3点计数中断指针 1010~1060共6点8、数据寄存器 D1)通用数据寄存器D0~D199 共 200 点2)断电保持数据寄存器D200~D7999其中断电保持用 D200~D511 共 312 点不能用软件改变的断电保持 D512~D7999 共 7488 点,可用 RST 和 ZRST指令清除它的内容。
16路输入8路输出继电器可编程模块产品使用说明简要说明:一、尺寸:长144mmX宽107mmX高25mm二、主要芯片:STC12C5A60S2 是51单片机的8~12倍(兼容51系列单片机)三、工作电压:直流12伏(另有24V继电器可选)四、通过9针串口下载程序(同时支持TTL下载程序)五、特点:1、具有电源指示。
(供电电源有防接反保护)2、16路输入(包括:2路模拟量输入,2路高速光电输入,12路光电隔离输入)。
3、8路光电隔离继电器输出控制。
4、标准的11.0592M晶振。
(便于设置串口波特率)5、具有上电复位和手动复位。
6、独立的串口通信及485通信。
7、可以接315M带解码的无线接收模块。
8、输入输出均有信号指示灯。
9、继电器开关量输出,最大切换电压220V,最大切换电流7A。
最大切换功率200W。
10、电流加有,光电隔离,续流二极管,压敏电阻,抗干扰能力强。
11、四周有固定安装孔,也可插入PCB107mm卡槽,安装在DIN导轨上。
12、通讯稳定,提供原理图,及板子的参考例程。
13、单片机无加密,可插拔更换,带有程序下载口,可随意更改程序14、、端子采用螺旋压接端子15、工作温度-40度至 +70度16、工作湿度 40% ~ 80%RH使用说明:【标示图】【供电接线图】【通讯及下载接线图】【模拟量输入接线图】【光电隔离输入接线图】【高速光耦输入接线图】【外接315M无线遥控模块】(默认发货不提供接收模块和遥控器需要另外联系销售购买)通过编程实现控制。
提供相关例程。
【输出部分标注说明】【原理图】(提供PDF文件)【PCB图】(提供PDF文件)【原件清单】(提供PDF文件)【测试程序】(提供源代码及各个模块功能的代码)01.一对一点动输出程序/********************************************************************汇诚科技使用芯片:STC12C5A60S2晶振:11.0592MHZ编译环境:Keil作者:zhangxinchunleo*********************************************************************/ /******************************************************************** 程序说明://模拟量输入(这里用作普通IO口,高电平触发)当IN1口与+5V口接通后,对应的继电器吸合,OUT1接通//第一组普通开光量输入(可做脉冲输入,最大1Khz的脉冲)当IN2口与GND口接通后,对应的继电器吸合,OUT2接通当IN3口与GND口接通后,对应的继电器吸合,OUT3接通当IN4口与GND口接通后,对应的继电器吸合,OUT4接通当IN5口与GND口接通后,对应的继电器吸合,OUT5接通当IN6口与GND口接通后,对应的继电器吸合,OUT6接通当IN7口与GND口接通后,对应的继电器吸合,OUT7接通//第二组普通开光量输入(可做脉冲输入,最大1Khz的脉冲)当IN8口与GND口接通后,对应的继电器吸合,OUT8接通当IN9口与GND口接通后,对应的继电器吸合,OUT9接通当IN10口与GND口接通后,对应的继电器吸合,OUT10接通当IN11口与GND口接通后,对应的继电器吸合,OUT11接通当IN12口与GND口接通后,对应的继电器吸合,OUT12接通当IN13口与GND口接通后,对应的继电器吸合,OUT1接通//高速脉冲输入(最大100KHz)(也可作普通IO口用)当IN14口与GND口接通后,对应的继电器吸合,OUT2接通当IN15口与GND口接通后,对应的继电器吸合,OUT3接通********************************************************************** */#include "STC12C5A60S2.H"/********************************************************************初始定义*********************************************************************/ /*定义十四个输入*///模拟量接口,做普通IO口时,高定平有效(这里用做普通IO口)sbit IN1=P1^0;//开光量输入低电平有效sbit IN2=P1^1;sbit IN3=P1^4;sbit IN4=P1^5;sbit IN5=P1^6;sbit IN6=P1^7;sbit IN7=P3^4;sbit IN8=P3^5;sbit IN9=P3^6;sbit IN10=P3^7;sbit IN11=P4^6;sbit IN12=P4^5;sbit IN13=P4^4;//高速脉冲输入,触发信号高低可选sbit IN14=P3^2;sbit IN15=P3^3;/*定义八位输出*/sbit OUT1= P0^4;sbit OUT2= P0^5;sbit OUT3= P0^6;sbit OUT4= P0^7;sbit OUT5= P2^7;sbit OUT6= P2^6;sbit OUT7= P2^5;sbit OUT8= P2^4;sbit OUT9= P2^3;sbit OUT10=P2^2;sbit OUT11=P2^1;sbit OUT12=P2^0;void main(){P1M1|=0X01; //0000 0001 //因为此IO口直接引出,外加下拉电阻。
15路输入12路输出继电器可编程模块产品使用说明介绍15路输入12路输出继电器可编程模块是一种用于控制电气设备的设备,它具有15个输入通道和12个输出通道。
该模块可以通过编程和配置实现各种自动化控制,广泛应用于工业控制、自动化控制、家庭自动化等领域。
本文将详细介绍15路输入12路输出继电器可编程模块的使用方法和注意事项。
一、功能介绍1.提供15个输入通道,可以接入不同的信号源,如开关、传感器等。
2.提供12个输出通道,可以控制不同的电气设备,如灯光、电机等。
3.可通过编程和配置实现输入与输出之间的逻辑关系,以实现自动化控制。
4.支持多种输入信号类型,如开关量、模拟量等。
5.支持多种输出类型,如继电器输出、模拟量输出等。
二、使用方法使用15路输入12路输出继电器可编程模块,需要按照以下步骤进行操作:1.将模块与电源连接,并确保电源正常工作。
2.将待控制的电气设备与输出通道连接,并确保连接正确。
3.将输入通道与信号源连接,并确保连接正确。
根据需要,可以选择不同的输入信号类型。
4.打开模块的编程软件,并按照软件的操作指南进行编程和配置。
编程软件一般提供图形化界面,方便用户进行操作。
5.在编程软件中,设置输入与输出之间的逻辑关系。
可以根据实际需求,设置触发条件、时间延迟、输出逻辑等参数。
7.测试模块的工作状态。
可以通过改变输入信号的状态,观察输出通道的状态变化,以验证编程是否正确。
如有需要,可以进行调整和修改。
三、注意事项在使用15路输入12路输出继电器可编程模块时,需要注意以下事项:1.请确保模块的电源接入正确,并符合电源要求。
勿接入过高或过低的电源,以免损坏设备。
2.在接线时,请仔细检查连接是否正确,确保输入与输出通道对应。
连接错误可能导致设备无法正常工作或产生危险。
3.在编程和配置时,请仔细阅读使用说明书,并按照说明书进行操作。
错误的设置可能导致设备无法正常工作或产生危险。
4.在使用过程中,如果发现设备工作异常,请立即停止使用,并检查设备是否损坏或配置是否正确。
三菱FX2N可编程控制器使用手册一、可编程控制器的内部编程元件1、输入继电器X:X000~X017 共16点2、输出继电器Y: Y000~Y017 共16点3、辅助继电器M:1)通用辅助继电器 M0~M499 共500点2)断电保持继电器 M500~M3071 共2572点3)特殊辅助继电器 M8000~M8255 共256点4、状态继电器S:S0~S499 共500点1)初始状态继电器 S0~S9 共10点2)回零状态继电器 S10~S19 共10点,供返回原点用3)通用状态继电器 S20~S499 共480点4)断电保持状态继电器 S500~S899 共400点5)报警用状态继电器 S900~S999 共100点5、定时器T:T0~T255 共256点1)常规定时器 T0~T255 共256点T0~T199为100ms定时器,共200点,其中T192~T199为子程序中断服务程序专用的定时器。
T200~T245为10ms定时器共46点2)积算定时器 T246~T255 共10点T246~T249为1ms积算定时器共4点T250~T255为100ms积算定时器共6点6、计算器 C:C0~C234 共235点1)16位计数器 C0~C199 共200点其中C0~C99为通用型共100点C100~C199为断电保持型共100点2)32位加/减计数器 C200~C234 共35点其中C200~C219为通用型共20点C220~C234为断电保持型共15点7、指针P/I1)分支用指针P0~P127 共128点2)中断用指针I XXX 共15点其中输入中断指针100~150 共6点定时中断指针16~18 共3点计数中断指针1010~1060 共6点8、数据寄存器D1)通用数据寄存器 D0~D199 共200点2)断电保持数据寄存器 D200~D7999其中断电保持用 D200~D511 共312点不能用软件改变的断电保持 D512~D7999 共7488点,可用RST 和ZRST指令清除它的内容。