linux下串口通信设置
- 格式:doc
- 大小:359.00 KB
- 文档页数:21
Linux下串口通信编程一、什么是串口通信?串口通信是指计算机主机与外设之间以及主机系统与主机系统之间数据的串行传送。
使用串口通信时,发送和接收到的每一个字符实际上都是一次一位的传送的,每一位为1或者为0。
二、串口通信的分类串口通信可以分为同步通信和异步通信两类。
同步通信是按照软件识别同步字符来实现数据的发送和接收,异步通信是一种利用字符的再同步技术的通信方式。
2.1 同步通信同步通信是一种连续串行传送数据的通信方式,一次通信只传送一帧信息。
这里的信息帧与异步通信中的字符帧不同,通常含有若干个数据字符。
它们均由同步字符、数据字符和校验字符(CRC)组成。
其中同步字符位于帧开头,用于确认数据字符的开始。
数据字符在同步字符之后,个数没有限制,由所需传输的数据块长度来决定;校验字符有1到2个,用于接收端对接收到的字符序列进行正确性的校验。
同步通信的缺点是要求发送时钟和接收时钟保持严格的同步。
2.2 异步通信异步通信中,数据通常以字符或者字节为单位组成字符帧传送。
字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。
发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步。
接收端检测到传输线上发送过来的低电平逻辑"0"(即字符帧起始位)时,确定发送端已开始发送数据,每当接收端收到字符帧中的停止位时,就知道一帧字符已经发送完毕。
在异步通行中有两个比较重要的指标:字符帧格式和波特率。
(1)字符帧,由起始位、数据位、奇偶校验位和停止位组成。
1.起始位:位于字符帧开头,占1位,始终为逻辑0电平,用于向接收设备表示发送端开始发送一帧信息。
2.数据位:紧跟在起始位之后,可以设置为5位、6位、7位、8位,低位在前高位在后。
3.奇偶校验位:位于数据位之后,仅占一位,用于表示串行通信中采用奇校验还是偶校验。
(2)波特率,波特率是每秒钟传送二进制数码的位数,单位是b/s。
异步通信的优点是不需要传送同步脉冲,字符帧长度也不受到限制。
linux串口编程参数配置详解1.linux串口编程需要的头文件#include <stdio.h> //标准输入输出定义#include <stdlib.h> //标准函数库定义#include <unistd.h> //Unix标准函数定义#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h> //文件控制定义#include <termios.h> //POSIX中断控制定义#include <errno.h> //错误号定义2.打开串口串口位于/dev中,可作为标准文件的形式打开,其中:串口1 /dev/ttyS0串口2 /dev/ttyS1代码如下:int fd;fd = open(“/dev/ttyS0”, O_RDWR);if(fd == -1){Perror(“串口1打开失败!”);}//else//fcntl(fd, F_SETFL, FNDELAY);除了使用O_RDWR标志之外,通常还会使用O_NOCTTY和O_NDELAY这两个标志。
O_NOCTTY:告诉Unix这个程序不想成为“控制终端”控制的程序,不说明这个标志的话,任何输入都会影响你的程序。
O_NDELAY:告诉Unix这个程序不关心DCD信号线状态,即其他端口是否运行,不说明这个标志的话,该程序就会在DCD信号线为低电平时停止。
3.设置波特率最基本的串口设置包括波特率、校验位和停止位设置,且串口设置主要使用termios.h头文件中定义的termios结构,如下:struct termios{tcflag_t c_iflag; //输入模式标志tcflag_t c_oflag; //输出模式标志tcflag_t c_cflag; //控制模式标志tcflag_t c_lflag; //本地模式标志cc_t c_line; //line disciplinecc_t c_cc[NCC]; //control characters}代码如下:int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300, B384 00, B19200, B9600, B4800, B2400, B1200, B300, };int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9 600, 4800, 2400, 1200, 300, };void SetSpeed(int fd, int speed){int i;struct termios Opt; //定义termios结构if(tcgetattr(fd, &Opt) != 0){perror(“tcgetattr fd”);return;}for(i = 0; i < sizeof(speed_arr) / sizeof(int); i++){if(speed == name_arr[i]){tcflush(fd, TCIOFLUSH);cfsetispeed(&Opt, speed_arr[i]);cfsetospeed(&Opt, speed_arr[i]);if(tcsetattr(fd, TCSANOW, &Opt) != 0){perror(“tcsetattr fd”);return;}tcflush(fd, TCIOFLUSH);}}}注意tcsetattr函数中使用的标志:TCSANOW:立即执行而不等待数据发送或者接受完成。
在Linux中,串口通信通常使用termios结构体来配置串口参数,包括波特率等。
要设置非标准的波特率,可以使用以下方法:1. 首先,需要包含头文件`<termios.h>`和`<unistd.h>`。
2. 然后,使用`tcgetattr()`函数获取当前串口属性。
3. 修改`cfsetispeed()`和`cfsetospeed()`函数的参数,分别设置输入和输出波特率。
4. 使用`tcsetattr()`函数更新串口属性。
5. 最后,关闭串口设备。
以下是一个示例代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>#include <fcntl.h>#include <termios.h>int main() {int fd;struct termios options;// 打开串口设备fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);if (fd == -1) {perror("open_port: Unable to open /dev/ttyS0 - ");return(-1);}// 获取当前串口属性tcgetattr(fd, &options);// 设置非标准波特率(例如:9600)cfsetispeed(&options, B9600);cfsetospeed(&options, B9600);// 更新串口属性tcsetattr(fd, TCSANOW, &options);// 关闭串口设备close(fd);return 0;}```注意:请根据实际情况修改串口设备名称(如`/dev/ttyS0`)和波特率(如`B9600`)。
linux 串口初始化程序实例Linux 串口初始化程序实例在Linux系统中,串口是一种常见的通信接口,用于连接计算机与外部设备,实现数据的传输和通信。
本文将介绍一个基于Linux系统的串口初始化程序实例,帮助读者了解如何在Linux系统中进行串口的初始化配置。
我们需要打开终端并登录到Linux系统。
然后,通过以下命令查看系统中可用的串口设备:```ls /dev/ttyS*```该命令将列出系统中所有的串口设备,例如/dev/ttyS0、/dev/ttyS1等。
根据实际情况,选择需要初始化的串口设备。
接下来,我们需要使用stty命令来配置串口的参数,如波特率、数据位、校验位、停止位等。
例如,假设我们将串口设备设置为波特率9600,数据位8位,无校验位,停止位为1位,可以使用以下命令进行配置:```stty -F /dev/ttyS0 9600 cs8 -parenb -cstopb其中,-F参数指定要配置的串口设备,9600为波特率,cs8为数据位8位,-parenb为无校验位,-cstopb为停止位1位。
配置完成后,我们可以通过以下命令检查串口的参数配置是否正确:```stty -F /dev/ttyS0 -a```该命令将显示串口的当前参数配置,包括波特率、数据位、校验位、停止位等。
接下来,我们可以使用串口设备进行数据的收发。
例如,可以使用cat命令从串口设备读取数据:```cat /dev/ttyS0```该命令将会连续地从串口设备读取数据并输出到终端。
如果需要通过串口发送数据,可以使用echo命令:```echo "Hello, Serial Port!" > /dev/ttyS0该命令将向串口设备发送字符串"Hello, Serial Port!"。
通过以上步骤,我们就完成了Linux系统中串口的初始化配置。
读者可以根据实际需求,对串口的参数进行相应的配置,并使用串口进行数据的收发。
linux下的串⼝通信原理及编程实例linux下的串⼝通信原理及编程实例⼀、串⼝的基本原理1 串⼝通讯串⼝通讯(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进⾏传输数据的⼀种通讯⽅式。
串⼝是⼀种接⼝标准,它规定了接⼝的电⽓标准,没有规定接⼝插件电缆以及使⽤的协议。
2 串⼝通讯的数据格式 ⼀个字符⼀个字符地传输,每个字符⼀位⼀位地传输,并且传输⼀个字符时,总是以“起始位”开始,以“停⽌位”结束,字符之间没有固定的时间间隔要求。
每⼀个字符的前⾯都有⼀位起始位(低电平),字符本⾝由7位数据位组成,接着字符后⾯是⼀位校验位(检验位可以是奇校验、偶校验或⽆校验位),最后是⼀位或⼀位半或⼆位停⽌位,停⽌位后⾯是不定长的空闲位,停⽌位和空闲位都规定为⾼电平。
实际传输时每⼀位的信号宽度与波特率有关,波特率越⾼,宽度越⼩,在进⾏传输之前,双⽅⼀定要使⽤同⼀个波特率设置。
3 通讯⽅式单⼯模式(Simplex Communication)的数据传输是单向的。
通信双⽅中,⼀⽅固定为发送端,⼀⽅则固定为接收端。
信息只能沿⼀个⽅向传输,使⽤⼀根传输线。
半双⼯模式(Half Duplex)通信使⽤同⼀根传输线,既可以发送数据⼜可以接收数据,但不能同时进⾏发送和接收。
数据传输允许数据在两个⽅向上传输,但是,在任何时刻只能由其中的⼀⽅发送数据,另⼀⽅接收数据。
因此半双⼯模式既可以使⽤⼀条数据线,也可以使⽤两条数据线。
半双⼯通信中每端需有⼀个收发切换电⼦开关,通过切换来决定数据向哪个⽅向传输。
因为有切换,所以会产⽣时间延迟,信息传输效率低些。
全双⼯模式(Full Duplex)通信允许数据同时在两个⽅向上传输。
因此,全双⼯通信是两个单⼯通信⽅式的结合,它要求发送设备和接收设备都有独⽴的接收和发送能⼒。
在全双⼯模式中,每⼀端都有发送器和接收器,有两条传输线,信息传输效率⾼。
显然,在其它参数都⼀样的情况下,全双⼯⽐半双⼯传输速度要快,效率要⾼。
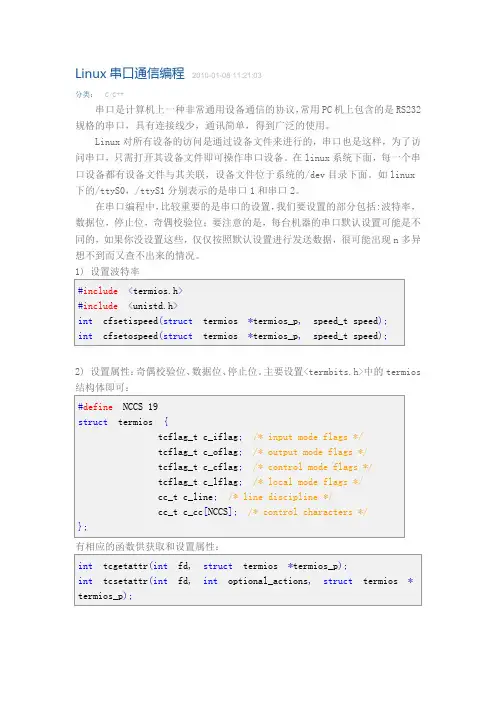
2) 设置属性:奇偶校验位、数据位、停止位。
主要设置<termbits.h>中的termios3) 打开、关闭和读写串口。
串口作为设备文件,可以直接用文件描述符来进行网上的一个例子:/*串口设备无论是在工控领域,还是在嵌入式设备领域,应用都非常广泛。
而串口编程也就显得必不可少。
偶然的一次机会,需要使用串口,而且操作系统还要求是Linux,因此,趁着这次机会,综合别人的代码,进行了一次整理和封装。
具体的封装格式为C代码,这样做是为了很好的移植性,使它可以在C和C++环境下,都可以编译和使用。
代码的头文件如下: *//////////////////////////////////////////////////////////////////// //////////////filename:stty.h#ifndef__STTY_H__#define__STTY_H__//包含头文件#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>#include<sys/stat.h>#include<fcntl.h>#include<termios.h>#include<errno.h>#include<pthread.h>//// 串口设备信息结构typedef struct tty_info_t{int fd;// 串口设备IDpthread_mutex_t mt;// 线程同步互斥对象char name[24];// 串口设备名称,例:"/dev/ttyS0"struct termios ntm;// 新的串口设备选项struct termios otm;// 旧的串口设备选项}TTY_INFO;//// 串口操作函数TTY_INFO *readyTTY(int id);int setTTYSpeed(TTY_INFO *ptty,int speed);int setTTYParity(TTY_INFO *ptty,int databits,int parity,int st opbits);int cleanTTY(TTY_INFO *ptty);int sendnTTY(TTY_INFO *ptty,char*pbuf,int size);int recvnTTY(TTY_INFO *ptty,char*pbuf,int size);int lockTTY(TTY_INFO *ptty);int unlockTTY(TTY_INFO *ptty);#endif/*从头文件中的函数定义不难看出,函数的功能,使用过程如下:(1)打开串口设备,调用函数setTTYSpeed();(2)设置串口读写的波特率,调用函数setTTYSpeed();(3)设置串口的属性,包括停止位、校验位、数据位等,调用函数setTTYParity ();(4)向串口写入数据,调用函数sendnTTY();(5)从串口读出数据,调用函数recvnTTY();(6)操作完成后,需要调用函数cleanTTY()来释放申请的串口信息接口;其中,lockTTY()和unlockTTY()是为了能够在多线程中使用。

一、基于VM虚拟机linux系统串口配置配置分为虚拟机下配置及linux系统下minicom配置两部分。
虚拟机模块配置如下:打开虚拟机配置界面。
选择Edit virtual machine settings。
进入配置界面。
选择Add…按钮,添加相关的设备文件。
选中串口选项后继续选择下一步。
此处选择”使用主机上的物理串口设备”选项,继续下一步。
此处我们选择文件。
对于物理串口选项,此处可以采用自动检测选项。
如果下来菜单中有对应于串口的端口号,则可以选择。
注意,对于设备状态,要确保选中“connect at power on“,即,上电连接状态。
至此,虚拟机端串口配置完毕。
注意:此处我们串口添加成功后默认未COM2.Linux下串口配置及使用。
Linux下一般使用minicom来作为串口数据输入输出的终端。
类似于Windows下的超级终端。
虚拟机下配置完毕后,进入Linux系统中,在Shell 终端下输入minicom -s即可配置串口终端。
配置完成后执行minicom启动串口终端。
在终端界面下完成相关的参数配置并保存后,启动终端设备,即可在minicom中观察到数据输出。
<四>Minicom的使用(1)minicom界面介绍第一次运行minicom,启动minicom要以root权限登录系统,需要进行minicom的设置,输入下了命令#minicom –s,显示的屏幕如下所示,按上下光标键进行上下移动选择,我们要对串行端口进行设置,因此选中Serial port setup,然后回车:__[configuration]─-─—┐//配置│ Filenames and paths │//文件名和路径│ File transfer protocols│//文件传输协议│ Serial port setup │//串行端口设置│ Modem and dialing │//调制解调器和拨号│ Screen and keyboard │//屏幕和键盘│ Save setup as dfl │//设置保存到│ Save setup as.. │//储存设定为│ Exit │//退出│ Exit from Minicom │//退出minicom└──────────┘(2)minicom的参数设置选中设置串行端口,点击回车后,弹出设置的界面如下:点击”A”设置串行设置为/dev/ttyS1,这表示使用串口2(com2),如果是/dev/ttyS1则表示使用串口2(com 2).按”E”键进入设置”bps/par/Bits”(波特率)界面,如下图所示。
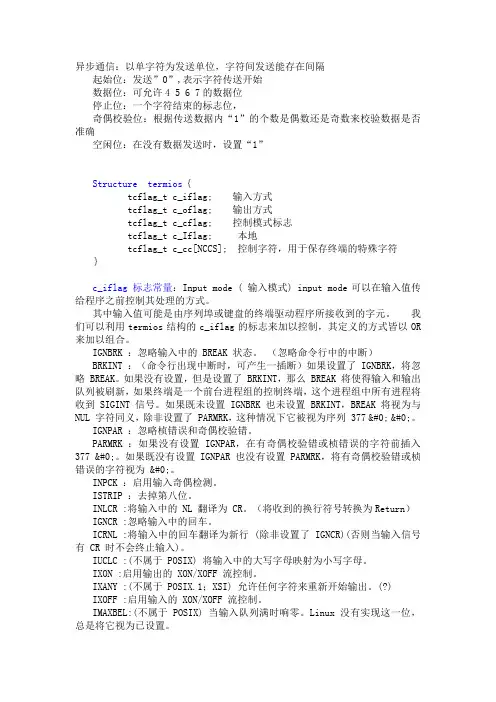
异步通信:以单字符为发送单位,字符间发送能存在间隔起始位:发送”0”,表示字符传送开始数据位:可允许4 5 6 7的数据位停止位:一个字符结束的标志位,奇偶校验位:根据传送数据内“1”的个数是偶数还是奇数来校验数据是否准确空闲位:在没有数据发送时,设置“1”Structure termios{tcflag_t c_iflag; 输入方式tcflag_t c_oflag; 输出方式tcflag_t c_cflag; 控制模式标志tcflag_t c_Iflag; 本地tcflag_t c_cc[NCCS]; 控制字符,用于保存终端的特殊字符}c_iflag 标志常量:Input mode ( 输入模式) input mode可以在输入值传给程序之前控制其处理的方式。
其中输入值可能是由序列埠或键盘的终端驱动程序所接收到的字元。
我们可以利用termios结构的c_iflag的标志来加以控制,其定义的方式皆以OR 来加以组合。
IGNBRK :忽略输入中的 BREAK 状态。
(忽略命令行中的中断)BRKINT :(命令行出现中断时,可产生一插断)如果设置了 IGNBRK,将忽略 BREAK。
如果没有设置,但是设置了 BRKINT,那么 BREAK 将使得输入和输出队列被刷新,如果终端是一个前台进程组的控制终端,这个进程组中所有进程将收到 SIGINT 信号。
如果既未设置 IGNBRK 也未设置 BRKINT,BREAK 将视为与NUL 字符同义,除非设置了 PARMRK,这种情况下它被视为序列 377 � �。
IGNPAR :忽略桢错误和奇偶校验错。
PARMRK :如果没有设置 IGNPAR,在有奇偶校验错或桢错误的字符前插入377 �。
如果既没有设置 IGNPAR 也没有设置 PARMRK,将有奇偶校验错或桢错误的字符视为 �。
INPCK :启用输入奇偶检测。
Linux下串⼝操作-嵌⼊式-C语⾔实现1.找到串⼝的设备号在linux系统下,所有的设备都是⽂件,所以要先找到串⼝这个设备⽂件,之后就可以对这个串⼝进⾏操作。
#define UART_DEV "/dev/tty*" ///dev/tty**串⼝号2.打开串⼝并初始化串⼝串⼝的打开只需要⼀个open函数就可以打开,下⾯有⼀个初始化的函数,先将串⼝打开,如果打开成功,会返回⼀个设备描述符int uart_init(void ){int fd=0;fd = open(UART_DEV , O_RDWR|O_NOCTTY|O_NDELAY, 0);if (fd < 0){printf("open error!\n");return -1;}set_opt(fd);return fd;}set_opt函数⽤于设置串⼝的相关基本参数,⼀般串⼝都会设置波特率什么的,其余的参数可以⽤到的时候再查询是什么意思,set_opt函数的定义如下:int set_opt(int fd){struct termios old_cfg, new_cfg;tcgetattr(fd, &new_cfg);new_cfg.c_cflag |= (CLOCAL | CREAD);cfsetispeed(&new_cfg, B9600);//设置波特率cfsetospeed(&new_cfg, B9600);new_cfg.c_cflag &= ~CSIZE;new_cfg.c_cflag |= CS8;new_cfg.c_cflag &= ~PARENB;new_cfg.c_cflag &= ~CSTOPB;new_cfg.c_cc[VTIME] = 0;new_cfg.c_cc[VMIN] = 0;tcflush(fd,TCIFLUSH);tcsetattr(fd, TCSANOW, &new_cfg);return0;}这样设置好了以后,串⼝的初始化基本就完成了。
基于linux和Qt的串口通信调试器调的设计及应用摘要:目前基于Linux操作系统的应用开发越来越广泛,Qt是一个跨平台的C++图形用户界面应用程序框架,它可以开发基于Linux上的图形应用程序。
Linux操作系统对串行口提供了很好的支持,为了在Linux系统下能让串口与其它硬件设备方便直观地进行通信,本文介绍了在Ubuntu10.10系统平台Qt-4.7及Qt Creator2.0编程环境下串口调试界面的设计及程序的编写。
关键词:串口通信Linux QT1 Qextserialport 类介绍在Qt类库中并没有特定的串口基础类,现在很多人使用的是第三方写的qextserialport类,它是一个跨平台的串口类,可以很方便地在Qt 中对串口进行读写操作。
本文也使用了该类。
文件下载地址: /projects/qextserialport/files/下载到的文件名为qextserialport-1.2win-alpha。
在linux平台中,我们只需用到其中的四个文件:qextserialbase.cpp和qextserialbase.h以及posix_qextserialport.cpp和posix_qextserialport.h。
其中前两个文件定义了一个QextSerialBase 类,它提供了操作串口所必需的一些变量和函数等;后两个文件定义了一个Posix_QextSerialPort 类,Posix_QextSerialPort类添加了Linux平台下操作串口的一些功能。
2 串口的基本设置串口的基本参数在posix_qextserialport.cpp文件里的构造函数中进行设置,它的最后一个构造函数:Posix_QextSerialPort::Posix_QextSerialPort(const QString & name, const PortSettings&settings, QextSerialBase::QueryMode mode)它共有3个参数,第一个是串口名,第二个是对串口参数的基本设置,第三个是读取串口的方式。
详解linux下的串口通讯开发串行口是计算机一种常用的接口,具有连接线少,通讯简单,得到广泛的使用。
常用的串口是RS-232-C接口(又称EIA RS-232-C)它是在1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。
串口通讯指的是计算机依次以位(bit)为单位来传送数据,串行通讯使用的范围很广,在嵌入式系统开发过程中串口通讯也经常用到通讯方式之一。
Linux对所有设备的访问是通过设备文件来进行的,串口也是这样,为了访问串口,只需打开其设备文件即可操作串口设备。
在linux系统下面,每一个串口设备都有设备文件与其关联,设备文件位于系统的/dev目录下面。
如linux下的/ttyS0,/ttyS1分别表示的是串口1和串口2。
下面来详细介绍linux下是如何使用串口的:1. 串口操作需要用到的头文件#include <stdio.h> /*标准输入输出定义*/#include <stdlib.h> /*标准函数库定义*/#include <unistd.h> /*Unix 标准函数定义*/#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h> /*文件控制定义*/#include <termios.h> /*POSIX 终端控制定义*/#include <errno.h> /*错误号定义*/#include <string.h> /*字符串功能函数*/2. 串口通讯波特率设置波特率的设置定义在<asm/termbits.h>,其包含在头文件<termios.h>里。
常用的波特率常数如下:B0-------à0 B1800-------à1800B50-----à50 B2400------à2400B75-----à75 B4800------à4800B110----à110 B9600------à9600B134----à134.5 B19200-----à19200B200----à200 B38400------à38400B300----à300 B57600------à57600B600----à600 B76800------à76800B1200---à1200 B115200-----à115200假定程序中想要设置通讯的波特率,使用cfsetispeed( )和cfsetospeed( )函数来操作,获取波特率信息是通过cfgetispeed()和cfgetospeed()函数来完成的。
Linux串⼝调试详解测试平台宿主机平台:Ubuntu 16.04.6⽬标机:iMX6ULL⽬标机内核:Linux 4.1.15⽬标机添加串⼝设备⼀般嵌⼊式主板的默认镜像可能只配置了调试串⼝,并⽤于 console 控制台打印;接下来对怎么样通过设备树来分配引脚⽤于⽤户串⼝通信进⾏描述;前提:⽬标机以及正常烧录 uboot、内核、⽂件系统、dtb等;本⽂仅更新设备树dtb⽂件;设备树⽂件修改在内核源码中找到相关板⼦对应的dtb⽂件;位置: arch/arm/boot/dts ⽬录下本⽂使⽤的板⼦相关⽂件有:imx6ull.dtsi // 官⽅通⽤板层dtsimys-imx6ull-14x14-evk.dts // 基于imx6ull-14x14-evk.dts模板修改mys-imx6ull-14x14-evk-gpmi-weim.dts // ⽤户层dts添加 uart3和uart4 的⽀持,修改 mys-imx6ull-14x14-evk.dts ⽂件如下pinctrl_uart2: uart2grp {fsl,pins = <MX6UL_PAD_UART2_TX_DATA__UART2_DCE_TX 0x1b0b1MX6UL_PAD_UART2_RX_DATA__UART2_DCE_RX 0x1b0b1>;};pinctrl_uart2dte: uart2dtegrp {fsl,pins = <MX6UL_PAD_UART2_TX_DATA__UART2_DTE_RX 0x1b0b1MX6UL_PAD_UART2_RX_DATA__UART2_DTE_TX 0x1b0b1MX6UL_PAD_UART3_RX_DATA__UART2_DTE_CTS 0x1b0b1MX6UL_PAD_UART3_TX_DATA__UART2_DTE_RTS 0x1b0b1>;};/* 增加uart3/4/5的引脚配置 */pinctrl_uart3: uart3grp {fsl,pins = <MX6UL_PAD_UART3_TX_DATA__UART3_DCE_TX 0x1b0b1MX6UL_PAD_UART3_RX_DATA__UART3_DCE_RX 0x1b0b1>;};pinctrl_uart4: uart4grp {fsl,pins = <MX6UL_PAD_UART4_TX_DATA__UART4_DCE_TX 0x1b0b1MX6UL_PAD_UART4_RX_DATA__UART4_DCE_RX 0x1b0b1>;};pinctrl_uart5: uart5grp {fsl,pins = <MX6UL_PAD_UART5_TX_DATA__UART5_DCE_TX 0x1b0b1MX6UL_PAD_UART5_RX_DATA__UART5_DCE_RX 0x1b0b1>;};...../* 使能串⼝ */&uart1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_uart1>;status = "okay";};&uart2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_uart2>;/*fsl,uart-has-rtscts;*//* for DTE mode, add below change *//* fsl,dte-mode; *//* pinctrl-0 = <&pinctrl_uart2dte>; */status = "disabled";};/* 增加使⽤串⼝,其中使能3、关闭4/5 */&uart3 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_uart3>;status = "okay";};&uart4 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_uart4>;status = "okay";};/* 这⾥必须注意⼀点,由于UART5和I2C2接⼝的引脚是复⽤的,I2C2默认是使能的所以必须禁⽤I2C2,再使能UART5. */&uart5 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_uart5>;status = "disabled";};然后重新编译⽣成设备树 dtb ⽂件cp arch/arm/configs/mys_imx6_defconfig .configmake ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- dtbs⽣成的 dtb ⽂件:arch/arm/boot/dts/mys-imx6ull-14x14-evk-gpmi-weim.dtb设备树⽂件更新采⽤ MFGTool2 进⾏设备树更新,怎么单独仅更新设备树参见mys-imx6ull-14x14-evk-gpmi-weim.dtb 替换 /Profiles/Wh Linux Update/OS Firmware/files/ 下⾯的 dtb⽂件然后执⾏ mfgtool2-linux-mys-6ulx-nand-dtb.vbsSet wshShell = CreateObject("WScript.shell")wshShell.run "mfgtool2.exe -c ""Wh Linux Update"" -l ""NAND-dtb"" -s ""lite=l"" -s ""6uluboot=14x14evk"" -s ""nand=nand"" -s ""6uldtb=14x14-evk"" -s ""nanddtb=gpmi-weim"" -s ""part_uboot=0"" -s ""part_kernel=1"" -s ""part_dtb=2"" Set wshShell = Nothing更新成功,设备重启之后,看到添加的串⼝设备已⽀持,串⼝驱动实现框架另外的⽂章在分析;串⼝应⽤编程1.串⼝相关操作在Linux下,除了⽹络设备,其余的都是⽂件的形式,串⼝设备也⼀样在/dev下。
linux下多串口错乱的一般解决方案在Linux下,当使用多个串口时可能出现错乱的情况。
以下是一般的解决方案:1. 检查串口设置:首先,确保每个串口的设置正确。
使用stty命令可以查看和修改串口的设置,如波特率、数据位数等。
确保每个串口的设置相同,并与设备连接的设备一致。
2. 避免串口冲突:多个串口设备可能会使用相同的IRQ(中断请求)或IO地址。
这可能导致冲突和错乱。
使用lspci或lsusb命令可以查看设备的IRQ和IO地址,确保它们不会冲突。
如果存在冲突,可以通过重新分配IRQ或IO地址来解决。
3. 禁用串口自动检测:有些Linux发行版可能会自动检测和配置串口设备。
这可能会导致错乱和冲突。
在启动时,可以通过修改内核参数或配置文件来禁用串口自动检测。
具体方法请参考相应发行版的文档。
4. 使用适当的串口驱动程序:确保使用适当的串口驱动程序。
有些串口设备需要特定的驱动程序才能正常工作。
使用lsmod命令可以查看已加载的模块,确保正确的驱动程序已加载。
5. 使用流控制:在串口通信中,使用流控制可以避免数据丢失和错乱。
流控制可以通过硬件流控制(使用RTS/CTS信号)或软件流控制(使用XON/XOFF字符)来实现。
确保流控制已启用,并正确配置。
6. 更换串口线和设备:有时,串口线或设备本身可能存在问题,导致数据错乱。
尝试更换线缆和设备,并确保它们是可靠的。
7. 使用串口调试工具:在调试时,可以使用串口调试工具(如minicom、screen等)来检测和解决错乱问题。
这些工具可以查看串口的输入输出,并帮助识别问题所在。
以上是一般的解决方案,具体解决方法可能因系统和硬件而异。
如果问题仍然存在,请参考相关文档和资源,或向相应的技术支持寻求帮助。
在Linux 中,使用串口通信时,如果遇到读空的情况,可能是由于以下几个原因:
1. 串口设备未正确打开:在使用串口之前,需要使用`open()` 函数打开串口设备文件。
如果设备文件路径不正确或没有足够的权限,会导致无法正确打开串口设备。
请确保使用正确的设备文件路径和正确的权限打开设备文件。
2. 缓冲区溢出:在读取串口数据时,如果没有设置足够的缓冲区,可能会导致缓冲区溢出,从而读取出空数据。
请确保在读取数据之前,设置足够的缓冲区大小。
3. 串口通信参数不匹配:如果发送方和接收方的串口通信参数不匹配,可能会导致接收方无法正确读取数据。
请确保发送方和接收方的波特率、数据位、停止位等参数一致。
4. 设备驱动程序问题:有时候,串口设备的驱动程序可能存在一些问题,导致读取数据时出现问题。
可以尝试重新编译或升级驱动程序来解决此问题。
Linux串口设置参数在Linux环境下,串口名从ttyS0开始依次是ttyS1、ttyS2等。
在本程序中,使用ttyS0作为通信串口。
在打开ttyS0的时候,选项O_NOCTTY 表示不能把本串口当成控制终端,否则用户的键盘输入信息将影响程序的执行; O_NDELAY表示打开串口的时候,程序并不关心另一端的串口是否在使用中。
在Linux中,打开串口设备和打开普通文件一样,使用的是open()系统调用。
比如我么打开串口设备1也就是COM1,只需要:fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY | O_NDELAY );打开的串口设备有很多设置选项。
本文中使用int setup_com(int fd)设置。
在系统头文件<termios.h>中定义了终端控制结构struct termios,tcgetattr()和tcsetattr()两个系统函数获得和设置这些属性。
结构struct termios中的域描述的主要属性包括:c_cflag :控制选项c_lflag :线选项c_iflag :输入选项c_oflag :输出选项c_cc :控制字符c_ispeed :输入数据波特率c_ospeed :输出数据波特率如果要设置某个选项,那么就使用"|="运算,如果关闭某个选项就使用"&="和"~"运算。
本文使用的各个选项的意义定义如下:c_cflag: CLOCAL 本地模式,不改变端口的所有者CREAD 表示使能数据接收器PARENB 表示偶校验PARODD 表示奇校验CSTOPB 使用两个停止位CSIZE 对数据的bit使用掩码CS8 数据宽度是8bitc_lflag: ICANON 使能规范输入,否则使用原始数据(本文使用)ECHO 回送(echo)输入数据ECHOE 回送擦除字符ISIG 使能SIGINTR,SIGSUSP, SIGDSUSP和 SIGQUIT 信号c_iflag: IXON 使能输出软件控制IXOFF 使能输入软件控制IXANY 允许任何字符再次开启数据流INLCR 把字符NL(0A)映射到CR(0D)IGNCR 忽略字符CR(0D)ICRNL 把CR(0D)映射成字符NR(0A)c_oflag: OPOST 输出后处理,如果不设置表示原始数据(本文使用原始数据)c_cc[VMIN]:最少可读数据c_cc[VTIME]:等待数据时间(10秒的倍数)根据以上设置的定义,串口端口设置函数setup_com()定义如下:int setup_com(int fd){struct termios options;tcgetattr(fd, &options);/* Set the baud rates to 38400...*/cfsetispeed(&options, B38400);cfsetospeed(&options, B38400);/* Enable the receiver and set local mode...*/options.c_cflag |= (CLOCAL | CREAD);/* Set c_cflag options.*/options.c_cflag |= PARENB;options.c_cflag &= ~PARODD;options.c_cflag &= ~CSTOPB;options.c_cflag &= ~CSIZE;options.c_cflag |= CS8;/* Set c_iflag input options */options.c_iflag &=~(IXON | IXOFF | IXANY);options.c_iflag &=~(INLCR | IGNCR | ICRNL);options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);/* Set c_oflag output options */options.c_oflag &= ~OPOST;/* Set the timeout options */options.c_cc[VMIN] = 0;options.c_cc[VTIME] = 10;tcsetattr(fd, TCSANOW, &options);return 1;}6.7.2 设置串口通信参数串口通信参数指的是波特率、数据位、奇偶校验位和停止位。