三轴稳定航天器的姿态确定-Read
- 格式:pdf
- 大小:792.45 KB
- 文档页数:57
三轴稳定卫星姿态控制算法研究共3篇三轴稳定卫星姿态控制算法研究1三轴稳定卫星姿态控制算法研究在卫星的运行过程中,姿态控制技术一直是关键技术之一。
卫星的三轴稳定姿态控制算法,是卫星姿态控制领域中的经典问题之一。
三轴稳定卫星的姿态控制需要同时控制三个轴向的角速度,以保持卫星的稳定运行,确保其执行任务的精确性和安全性。
在本文中,我们将对三轴稳定卫星姿态控制算法进行研究,并提出一种优化算法。
三轴稳定卫星姿态控制的基本问题是什么?三轴稳定卫星姿态控制中的基本问题是,如何使卫星保持稳定的姿态运行,以完成其所需的任务。
在此过程中,需要控制卫星的角速度,从而保持其稳定的旋转。
三轴稳定卫星姿态控制的关键点是合理地选择合适的姿态控制算法。
三轴稳定卫星姿态控制算法的分类目前,三轴稳定卫星姿态控制算法可以分为三个主要类型:基于PID控制器的算法、基于模型预测控制的算法和基于滑模控制的算法。
(1)基于PID控制器的算法PID控制器是最常用的一个控制器,在三轴稳定卫星姿态控制中也广泛使用。
PID控制器能够通过反馈调节卫星的角速度,使其保持稳定的姿态,从而确保其可以按照既定的轨道执行任务。
PID控制器的控制过程包括三个部分:比例积分微分控制。
其中,比例控制器能够根据误差的大小对卫星的角速度进行反馈控制,积分控制器可以根据误差积分值对误差进行修正,微分控制器则可以根据误差的变化率对误差进行修正,在三个部分协同下,PID控制器可以实现对卫星姿态的稳定控制。
(2)基于模型预测控制的算法基于模型预测控制的算法可以减少姿态控制的误差,并更加精准、快速地控制卫星的姿态。
这种方法将卫星的角速度和姿态动力学模型等信息融合在一起,通过预测卫星的姿态变化并提前作出反应,从而实现更加准确的实时控制。
(3)基于滑模控制的算法基于滑模控制的算法以非线性控制为基础,具有较好的鲁棒性和追踪性。
滑模控制算法通过滑模面的设计,把控制量与状态变量分离,使其具备独立控制性质。
航天器姿态控制与导航技术在航天领域,航天器姿态控制与导航技术是非常重要的研究领域。
航天器的姿态控制是指通过调整航天器的姿态来改变航天器在空间中的方向和位置,以满足任务需求。
导航技术则是指通过各种传感器和算法来确定航天器在空间中的位置、速度和方向,以实现精确的航天器定位。
航天器姿态控制技术是实现航天任务的关键。
由于航天器需要在特定的时间和位置进行复杂的任务,如轨道纠正、卫星对接等,因此其姿态必须得到精确控制。
姿态控制主要考虑的要素包括三轴稳定性、姿态变化速率、轨道控制等。
三轴稳定性是指航天器在三个轴向上的姿态保持稳定,以保证航天器的姿态不发生偏离。
姿态变化速率是指航天器在进行不同任务时的姿态变化速度,需要根据任务需求进行调整。
轨道控制是指通过调整航天器姿态来实现轨道变化,如升轨、降轨等。
航天器姿态控制的关键技术包括推力矢量控制、惯性导航、陀螺仪等。
推力矢量控制是一种常用的航天器姿态控制技术。
它通过调整航天器发动机的喷口方向来改变推力的方向,以实现航天器的姿态控制。
推力矢量控制技术能够在航天器进行复杂任务时灵活调整航天器的姿态,提高任务执行的精度和效率。
惯性导航是另一种重要的航天器姿态控制技术。
它通过搭载惯性测量装置,如陀螺仪和加速度计,来测量航天器的姿态变化,然后通过控制系统来调整航天器的姿态。
惯性导航技术能够实现高精度的姿态控制,是一种常见的姿态控制策略。
导航技术在航天领域同样非常重要。
航天器的导航主要目标是确定航天器在空间中的位置、速度和方向。
为了实现精确的航天器定位,导航系统需具备高精度、高可靠性和高实时性。
航天器导航技术主要包括星载定位、地面测控、惯性导航等。
星载定位是通过接收地面导航卫星发射的信号,从而确定航天器在空间中的位置和速度。
地面测控是通过地面上的测控设备,如雷达和测角站,对航天器进行跟踪和测量,进而确定其位置和速度。
惯性导航则是通过搭载惯性测量装置来测量航天器的加速度和姿态变化,从而推算出航天器的位置和速度。


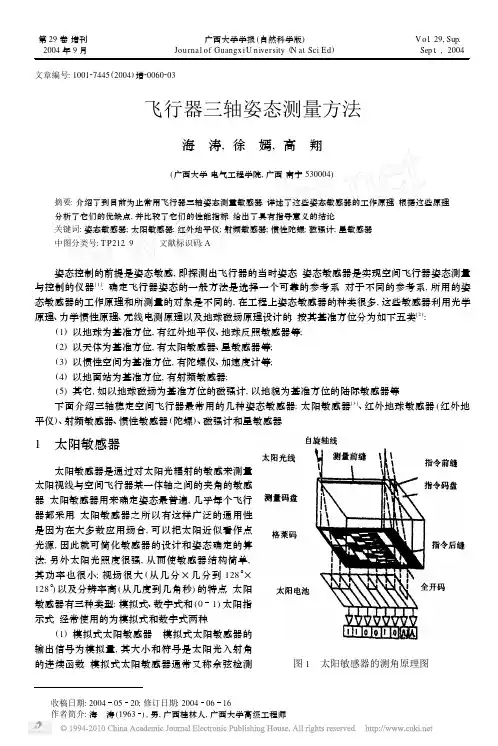
α文章编号:100127445(2004)增20060203飞行器三轴姿态测量方法海 涛,徐 嫣,高 翔(广西大学电气工程学院,广西南宁530004)摘要:介绍了到目前为止常用飞行器三轴姿态测量敏感器.详述了这些姿态敏感器的工作原理.根据这些原理分析了它们的优缺点,并比较了它们的性能指标.给出了具有指导意义的结论.关键词:姿态敏感器;太阳敏感器;红外地平仪;射频敏感器;惯性陀螺;磁强计;星敏感器中图分类号:T P 212.9 文献标识码:A姿态控制的前提是姿态敏感,即探测出飞行器的当时姿态.姿态敏感器是实现空间飞行器姿态测量与控制的仪器[1].确定飞行器姿态的一般方法是选择一个可靠的参考系.对于不同的参考系,所用的姿态敏感器的工作原理和所测量的对象是不同的,在工程上姿态敏感器的种类很多,这些敏感器利用光学原理、力学惯性原理、无线电测原理以及地球磁场原理设计的.按其基准方位分为如下五类[2]:(1)以地球为基准方位,有红外地平仪、地球反照敏感器等;(2)以天体为基准方位,有太阳敏感器、星敏感器等;(3)以惯性空间为基准方位,有陀螺仪、加速度计等;(4)以地面站为基准方位,有射频敏感器;(5)其它,如以地球磁场为基准方位的磁强计,以地貌为基准方位的陆际敏感器等.下面介绍三轴稳定空间飞行器最常用的几种姿态敏感器:太阳敏感器[3]、红外地球敏感器(红外地平仪)、射频敏感器、惯性敏感器(陀螺)、磁强计和星敏感器.1 太阳敏感器图1 太阳敏感器的测角原理图 太阳敏感器是通过对太阳光辐射的敏感来测量太阳视线与空间飞行器某一体轴之间的夹角的敏感器.太阳敏感器用来确定姿态最普遍,几乎每个飞行器都采用.太阳敏感器之所以有这样广泛的通用性是因为在大多数应用场合,可以把太阳近似看作点光源,因此就可简化敏感器的设计和姿态确定的算法;另外太阳光照度很强,从而使敏感器结构简单,其功率也很小;视场很大(从几分×几分到128°×128°)以及分辨率高(从几度到几角秒)的特点.太阳敏感器有三种类型:模拟式、数字式和(01)太阳指示式.经常使用的为模拟式和数字式两种.(1)模拟式太阳敏感器 模拟式太阳敏感器的输出信号为模拟量,其大小和符号是太阳光入射角的连续函数.模拟式太阳敏感器通常又称余弦检测第29卷增刊2004年9月广西大学学报(自然科学版)Journal of Guangxi U niversity (N at Sci Ed )V o l .29,Sup. Sep t .,2004 α收稿日期:20040520;修订日期:20040616作者简介:海 涛(1963),男,广西桂林人,广西大学高级工程师.器,这是因为硅太阳电池输出电流与太阳光入射角成正弦规律变化.模拟式太阳敏感器视场在几十度时,精度可达到0.5°;当视场很小,仅为1°~2°时,精度可达到秒级.例如“阿波罗”飞船所使用的模拟式太阳敏感器即属此类.(2)数字式太阳敏感器 数字式太阳敏感器的输出信号是与太阳入射角相关的以编码形式出现的离散函数(图1为太阳敏感器的测角原理图).图1左边是测量码盘,右边是指令码盘.码盘上、下两面都镀上不透光的金属模,并光刻成图中所示的图案.测量码盘的上表面有一个测量前缝,下表面左六道为格莱码,右边有一个全开码.太阳光通过前缝在格莱码图案上形成一条窄像.光像落在码道透明区时,光线便到达下面的太阳电池,经过线路处理为1,反之处理为0,我们利用这些0和1来测量姿态角.2 红外地球敏感器红外地球敏感器用来测量飞行器相对于地球的方位.地球大气二氧化碳层的14~16.25Λm 波段的红外能量辐射进入到地球敏感器视场,被热敏感元件(红外探头)接收并转换成代表地球波形的电信号,可以测量出当地垂线或地平方位,故称为红外地平仪.三轴稳定空间飞行器常用圆锥扫描式、摆动扫描式和辐射热平衡式三种类型的地球敏感器.圆锥扫描式发展较早,应用也较多.这种敏感器的优点是:扫描视场大,响应时间快,对于许多飞行任务适应性强,特别是对大范围姿态测量和姿态机动捕获更为合适.但由于存在运动扫描机构,因此寿命受到限制.这种敏感器的精度可达0.10°.辐射热平衡式地球敏感器不需要扫描机构,又称为静态红外地平仪.优点在于没有运动部件,体积和质量较小,功耗低,适合于长寿命飞行任务.但是,目前这种敏感器存在两个技术困难:仪器各部分之间的温度梯度所产生的热交换及季节变化所引起的地球红外辐射不均匀性和不平行性对测量精度产生严重影响.但目前技术有较大发展,如法国SOD EN 公司研制的SA T 04型敏感器用于T elecom 1卫星上,精度达到0.04°,运行寿命达7年.摆动扫描式地球敏感器分为单地平摆动扫描式和双地平摆动扫描式.其优点为:(1)由于对地球信号进行交流调制,减少了背景辐射和温度变化对探头的影响,从而降低了敏感器的误差;(2)对地球辐射的大范围变化不敏感,特别是视场扫描沿纬度方向,使纬度效应误差大大减少,从而降低了敏感器的系统误差;(3)由于敏感器选用了无摩擦的绕性轴承结构,因此使敏感器的可靠性及寿命大为提高.意大利伽利略公司生产的单地平摆动扫描式敏感器应用在同步轨道三轴稳定卫星O T S 上.敏感器运动部件由无刷电动机驱动,扫描频率为5H z ,寿命达八年以上(其中一个已经运行了十年),视场扫描范围为5°~10°,达到随机误差≤0.03°,系统误差≤0.03°的精度.我国“东方红三号”也选用这种敏感器.3 射频敏感器为了提高空间飞行器的姿态控制精度,姿态控制系统常采用两级测姿方式:对于有效载荷为通信天线的对象,可采取雷达原理和天线结合在一起的方式测量姿态,这就是射频敏感器,又称无线电敏感器.射频敏感器的精度高于红外地球敏感器.射频敏感器确定飞行器姿态的原理是基于飞行器的天线轴与目标无线电波瞄准线之间的夹角的测量.目前大多数采用两种形式:基于振幅定向法的比幅单脉冲射频敏感器和基于相位定向法的比相单脉冲的射频敏感器(又称干涉仪).射频敏感器也可用作指向参考,但如果要求高准确度的话,还需要一个指向天线.使用射频敏感器可以得到1角分的指向精度.这种敏感器非常适合通信卫星,因为通信卫星本身具有无线电电源信标.4 惯性姿态敏感器(陀螺)惯性导航系统(简称惯导系统,Inertial N avigati on System ,I N S )是一种利用加速度计测得的运载体的运动加速度、经过运算求出运载体即时位置的导航设备.实现此种导航定位计算所需的基准坐标16增刊海 涛等:飞行器三轴姿态测量方法26广西大学学报(自然科学版)第29卷 (导航坐标系)则依靠陀螺仪来建立.惯导系统可以工作两种不同的状态:第一种工作状态是向驾驶员提供运载体(舰船、飞机等)的位置与速度等导航参数,然后由驾驶员依据这些参数,靠人工将运载体按照预定的航线引导至目的地;第二种工作状态是在提供导航参数的基础上,通过控制系统将运载体自动地按照预定的航线至目的地,而驾驶员仅起监控作用.在无人操作的运载体(鱼雷、导弹、火箭等)上,惯性导航与自动控制相结合,将运载体自动导向预定的目标.惯导系统求得导航参数无需任何外界信息,而只依靠陀螺仪与加速度计这两种惯性仪表,因此是一种自主式的导航系统.这种系统不受外界的干扰,隐蔽性好.惯性系统还能方便地提供运载体的三维姿态参数,这些参数都是舰艇与飞机上观通系统和火控系统所必需的.惯性导航由于具有上述一系列优点而受到海陆空军、航天和交通运输等部门的青睐和重视.5 磁强计磁强计是以地球磁场为基准,测量航天器姿态的敏感器.磁强计本身是用来测量空间环境磁场强度和方向的仪器.由于空间每一位置的地球磁场强度都可以事先用地球磁位来确定,因此利用航天器上磁强计测得的信息便可以确定出星体相对于地球磁场的姿态.目前应用较多的是感应式磁强计,它是建立在法拉第磁感应定律的基础上的.法拉第电磁感应定律可以表示为:V=-N d5 d t,式中5为线圈中的磁通量;N为线圈的匝数;V为线圈的感应电势.感应式磁强计分为搜索线圈式磁强计和磁通门磁强计两种类型.前者用于自旋卫星上,依靠卫星的自旋使通过搜索线圈的地磁场磁通量作周期性的变化,并感应出一个周期性的交流电压,在此交流电压的相位包含了姿态的信息.也就是说搜索线圈式磁强计可用在自旋卫星上提供精密的相位信息.磁强计由于质量小、性能可靠、功耗低、工作温度范围宽以及没有活动部件而得到广泛应用.但是地球磁场模型仅仅是对地球磁场的近似描述,以此模型作为磁强计测量星体姿态的基准,将会带来较大的误差,因此磁强计不是一种高精度的姿态敏感器.另外,地球磁场强度是与地心距三次方成反比的,使得高轨道(高度大于1000公里)卫星内的剩余磁偏置将会超过地球磁场的影响.这时地球磁场便不能作为测量基准,使得磁强计的应用受到限制.本文综述了到目前为止出现的常用飞行器三轴姿态测量敏感器,并对它们的性能进行了分组分析比较,给出了具有一定指导意义的结论,对这一领域今后的研究工作具有启示作用.参考文献:[1] L iebe C C.Star trackers fo r attitude deter m inati on[J].IEEE A ES System s M agzine,1995,31(6):10216.[2] 黄圳圭.航天器姿态动力学[M].长沙:国防科技大学出版社,1997.1290.[3] 袁 信,俞济祥,陈 哲.导航系统[M].北京:航空工业出版社,1993.15247.The m ethod of m ea sur i ng a ttitude for aerocraf tHA I T ao,XU Yan,GAO X iang(Co llege of E lectrical Engineering,GuangxiU niversity,N anning530004,Ch ina)Abstract:T he sen so rs of m easu ring th ree axes attitude fo r aerocraft are p resen ted in the pap er.T he w o rk theo ry of sen so rs is then p resen ted in detail.T he advan tage and disadvan tage of these sen so rs are analyzed acco rding to their w o rk theo ry,at the sam e ti m e p erfo r m ance of som e comm on attitude sen so rs is com p ared.A t last som e conclu si on s are given.Key words:attitude sen so r;so lar sen so r;infrared earth sen so r.;radi o sen so r;inertial gyro m agnetom eter;star sen so r(责任编辑 刘海涛)。
三轴稳定卫星姿态确定及控制系统的研究一、本文概述随着航天技术的飞速发展,三轴稳定卫星已成为现代空间科技领域的重要组成部分。
这类卫星通过其精确的姿态确定及控制系统,实现了在太空环境中的稳定运行和高效工作。
本文旨在深入研究三轴稳定卫星的姿态确定及控制系统,探讨其工作原理、技术挑战以及优化策略,为未来的卫星设计与控制提供理论支持和实践指导。
本文首先将对三轴稳定卫星的基本概念和特点进行介绍,明确研究背景和目的。
随后,将详细分析卫星姿态确定的基本原理和方法,包括传感器技术、数据处理算法以及姿态估计理论等。
在此基础上,将探讨控制系统的设计原则和实现方式,包括姿态控制策略、执行机构选择以及控制算法优化等。
本文还将对三轴稳定卫星姿态确定及控制系统中的关键技术进行深入剖析,如姿态传感器误差补偿、控制算法鲁棒性增强以及卫星在轨自主定姿等。
将结合国内外相关研究成果,对现有的姿态确定及控制技术进行总结和评价,指出存在的问题和改进方向。
本文将提出一种优化的三轴稳定卫星姿态确定及控制系统设计方案,通过仿真实验和实地测试验证其有效性和可行性。
这一方案将为未来卫星的设计和制造提供有益的参考,推动航天技术的持续进步和发展。
二、三轴稳定卫星姿态确定原理三轴稳定卫星的姿态确定是其控制系统中的核心环节,它涉及到卫星在空间中的方向感知和姿态调整。
三轴稳定卫星的姿态确定原理主要基于惯性测量单元(IMU)和星敏感器(Star Tracker)等传感器的数据融合处理。
惯性测量单元(IMU)是卫星姿态确定的基础设备,它通过内部的陀螺仪和加速度计来测量卫星的角速度和加速度,进而推算出卫星的姿态变化。
然而,由于IMU的长期误差积累,单纯依赖IMU进行姿态确定无法满足长时间、高精度的要求。
因此,需要引入星敏感器(Star Tracker)等光学传感器进行辅助。
星敏感器通过拍摄星空图像,识别出已知的天体位置,进而解算出卫星的姿态。
这种方式的优点是精度高、误差积累小,但其缺点是受到观测条件的限制,例如在地球阴影区、太阳光照强烈等情况下,星敏感器可能无法正常工作。
星光-陀螺模式下三轴稳定卫星姿态的确定1 三轴稳定卫星姿态控制系统的组成参考控制 控制图1 三轴稳定卫星姿态确定与控制系统方图1中由虚线框标出的为姿态确定系统模块,它是卫星控制系统形成姿态控制指令的基础,而且其精度是影响姿态控制系统精度水平的决定性因素。
姿态确定的精度不仅取决于姿态测量系统的配置性能与精度,还与软件实现即姿态解算的方法有关。
2 三轴稳定卫星姿态测量系统的典型组成对于主体在空间保持三轴稳定的卫星,可以较方便地直接测量参考天体或参考目标在敏感器坐标系的方向,通过安装矩阵得出参考基准矢量在卫星本体坐标系的方向,此过程称为矢量观测。
因此,由陀螺和天体敏感器组成的姿态测量系统是三轴稳定卫星姿态确定的典型构成。
星敏感器是天体姿态敏感器中精度最高的,姿态测量系统选用星敏感器和陀螺作为基本配置方案,使得姿态控制精度为目前最高水平。
表1 国外一些主要观测卫星姿态测量系统的配置国别型号 指向精度()σ3姿态测量系统配置 Landsat-D(4)Landsat-G(7)o 03.0 o04.0 星敏感器、陀螺、磁强计 星敏感器、陀螺UARS o03.0 固定探头星跟踪器、陀螺备份:地球敏感器、太阳敏感器、陀螺 美国DMSP BLOCK 5D-2o 01.0 o12.0星敏感器、陀螺地球敏感器、太阳敏感器、陀螺法国SPOT-1.2.3o o5.0~1.0地球敏感器、太阳敏感器、陀螺SPOT-4o1.0星敏感器、陀螺OAO-2 OAO-3o 02.0 o25.0星敏感器、陀螺 四框架星跟踪器、陀螺美国OSO-7 OSO-8 太阳观察o 1.0 o 1.0 星敏感器、太阳敏感器、磁强计 美国SMMo1.0滚动三个两轴陀螺、二个星敏感器、太阳敏感器、磁强计 乌克兰 Spectr SATo085.0星跟踪器、陀螺3. 卫星运动描述与姿态测量3.1 坐标系地心惯性坐标系I I I Z Y OX (天球赤道坐标系)原点在地心,I Z 轴沿地球自转轴,I X 轴沿地球赤道平面与黄道平面的交线指向春分点,I Y 轴在赤道平面内与I X 轴、I Z 轴构成右手坐标系。
三轴稳定姿态计算
三轴稳定姿态计算是指通过传感器获取的姿态数据,通过计算得到物体在三个轴上的稳定姿态。
一般来说,三轴稳定姿态计算可以通过以下步骤来实现:
1. 传感器数据获取:通过加速度计、陀螺仪和磁力计等传感器获取物体的加速度、角速度和磁场强度等数据。
2. 数据处理和滤波:对传感器数据进行处理,包括数据滤波、校准和数据转换等。
滤波的目的是去除噪声和不稳定性,使得计算得到的姿态更加准确和稳定。
3. 姿态计算:利用传感器数据进行姿态计算,其中最常用的方法是通过加速度计计算物体的俯仰角和滚转角,通过磁力计计算物体的航向角。
角速度数据也可以用于修正姿态计算的精度。
4. 姿态输出:将计算得到的姿态数据输出,可以是欧拉角、四元数或旋转矩阵等形式,用于姿态控制、导航和目标跟踪等应用。
需要注意的是,三轴稳定姿态计算是一个复杂的问题,需要考虑传感器的精度、姿态变化的动态性以及物体的特性等因素。
此外,对于特定的应用需求,可能需要进行更加复杂的姿态估计算法和校准方法。