7-1 创建搬运码垛工作站+教案
- 格式:docx
- 大小:20.94 KB
- 文档页数:1
纸箱机器人码垛工作站方案说明一、项目内容:1.项目内容1.1 项目名称:纸箱机器人码垛工作站1.2 设备数量:该工作站主要包括一台KR100-2PA搬运机器人,1套吸盘式抓具、1套机械式抓具、四套垛箱输出传送线,一套空木拍放置架,一套纸箱定位调整装置,一套安全栏和一套控制系统。
1.3 设备用途该工作站用于纸箱的下线码垛。
2.设计依据2.1 用户提出的“技术参数及技术要求”。
2.2用户提供的工件尺寸及生产线的速度。
2.3 KR100-2PA机器人的特性参数。
3.系统特点:该系统具备以下特点:(1)机器人根据程序的设定,以及接受到的不同生产线工件到位信号,自动切换不同生产线抓取程序。
(2)整个系统单元由系统控制柜(PLC)统一集中控制,包括机器人的信号交换,防撞信号、安全门锁、纸箱到位信号、木拍位置信号等逻辑关系。
(3)由于在系统设计上及设备配置上充分考虑到安全性,故工作站具有较高的安全性。
(4)操作、编程、示教在手持控制器KCP2上完成,控制电缆长10米。
完全根据工效学设计的示教器,配上六维滑鼠,使用方便、舒服、快速。
大大提高编程和操作的效率。
(5)生产线的自动化设计,大大减轻劳动者的劳动强度。
4.系统方案介绍该工作站主要包括一台KR100-2PA搬运机器人,一套吸盘式抓具,1套机械式抓具、四套垛箱输出传送线,一套空木拍放置架,一套纸箱定位调整装置,一套安全栏和一套控制系统。
4.1 工作站工作过程说明:生产线将生产完成的纸箱输送到纸箱抓取工位,由定位调整装置将其定位后发信号给机器人,机器人抓取纸箱到码垛位置进行码垛,整垛码放完成后由垛箱输出传送线将垛箱输出到升降梯位置,机器人则到木拍放置架抓取木拍放置到码垛工位,然后重复抓取纸箱进行新垛的码放。
4.2 纸箱定位调整装置说明:纸箱定位调整装置采用固定定位挡块和推紧气缸进行定位,作用是使机器人抓取时纸箱位置准确,保证抓取方便及放置位置的准确度。
4.3 垛箱输出传送线说明:垛箱输出传送线装置采用电机驱动的滚道形式,当垛箱码放完成后输送线接收信号后启动,将垛箱输送出码垛工位,最终人工铲走进行入库。
搬运码垛机器人课程设计一、课程目标知识目标:1. 让学生理解搬运码垛机器人的基本结构、工作原理及其在工业生产中的应用。
2. 掌握搬运码垛机器人编程与操作的基本方法。
3. 了解搬运码垛机器人在现代物流仓储行业中的重要性。
技能目标:1. 培养学生运用所学知识对搬运码垛机器人进行编程、调试和操作的能力。
2. 提高学生分析问题、解决问题的实际操作能力。
3. 培养学生团队协作、沟通表达的能力。
情感态度价值观目标:1. 激发学生对机器人技术及其在工业生产中应用的兴趣,培养创新意识和探索精神。
2. 培养学生关注社会发展、具备社会责任感,认识到搬运码垛机器人在提高生产效率、减轻劳动强度方面的重要作用。
3. 培养学生严谨、认真、负责的学习态度,形成良好的职业素养。
本课程针对高年级学生,结合学科特点和教学要求,以实用性为导向,旨在使学生掌握搬运码垛机器人的基本知识和操作技能,培养其创新意识和职业素养。
课程目标分解为具体的学习成果,为教学设计和评估提供明确依据。
二、教学内容1. 搬运码垛机器人基础知识- 机器人的基本结构及其功能- 搬运码垛机器人的工作原理- 搬运码垛机器人在工业生产中的应用案例2. 搬运码垛机器人编程与操作- 编程语言基础- 编程操作流程- 常用编程指令及其功能- 机器人操作的安全规范3. 搬运码垛机器人应用案例分析- 物流仓储行业中的应用案例- 搬运码垛机器人在不同场景下的操作技巧- 搬运码垛机器人与其他自动化设备的协同工作4. 实践操作与项目演练- 搬运码垛机器人编程与调试实践- 操作技能训练- 团队协作项目演练教学内容依据课程目标,结合教材相关章节,确保科学性和系统性。
教学大纲安排如下:第一周:搬运码垛机器人基础知识学习第二周:搬运码垛机器人编程与操作方法学习第三周:搬运码垛机器人应用案例分析及操作技巧探讨第四周:实践操作与项目演练,巩固所学知识教学内容安排合理,进度适中,旨在帮助学生全面掌握搬运码垛机器人的相关知识和技能。
工业机器人码垛课程设计一、课程目标知识目标:1. 学生能理解工业机器人的基本结构、工作原理及在物流码垛领域的应用。
2. 学生掌握工业机器人码垛的基本流程、编程方法和相关技术参数。
3. 学生了解工业机器人码垛技术的发展趋势及其在智能制造业的重要性。
技能目标:1. 学生能操作工业机器人进行简单的码垛任务,提高实际操作能力。
2. 学生能运用编程软件对工业机器人进行编程,实现不同码垛任务。
3. 学生具备分析工业机器人码垛过程中问题及解决方法的能力。
情感态度价值观目标:1. 学生培养对工业机器人及智能制造技术的兴趣,激发创新意识。
2. 学生树立正确的工程观念,认识到工业机器人在现代制造业中的价值。
3. 学生培养团队协作精神,提高沟通与交流能力,为将来从事相关领域工作打下基础。
课程性质:本课程为实践性较强的课程,结合理论知识与实践操作,让学生在实际操作中掌握工业机器人码垛的相关技能。
学生特点:高中生具备一定的物理知识和动手能力,对新鲜事物充满好奇,善于团队合作。
教学要求:结合学生特点,注重理论与实践相结合,强调实际操作能力的培养,提高学生的综合素养。
通过课程学习,使学生能够达到上述课程目标,为我国智能制造领域培养合格的技术人才。
二、教学内容本课程教学内容分为以下四个部分:1. 工业机器人基本原理- 介绍工业机器人的发展历程、分类及基本结构。
- 解析工业机器人的运动学原理和动力学特性。
- 分析工业机器人在制造业中的应用场景。
2. 码垛工艺及其编程- 讲解码垛工艺的基本流程、技术要求和操作规范。
- 介绍工业机器人码垛编程的基本方法、技巧和注意事项。
- 指导学生运用编程软件进行工业机器人码垛编程实践。
3. 工业机器人码垛操作与调试- 指导学生进行工业机器人码垛操作的基本步骤和技巧。
- 分析码垛过程中可能遇到的问题及解决方案。
- 实践操作:组织学生进行工业机器人码垛任务,提高操作熟练度和解决问题的能力。
4. 工业机器人码垛技术的发展趋势- 介绍国内外工业机器人码垛技术的发展现状和趋势。
搬运码垛机器人课程设计一、教学目标本课程旨在通过学习搬运码垛机器人的相关知识,使学生掌握搬运码垛机器人的基本概念、工作原理和应用场景。
具体目标如下:1.了解搬运码垛机器人的定义、分类和特点。
2.掌握搬运码垛机器人的工作原理和基本结构。
3.了解搬运码垛机器人在工业生产中的应用场景。
4.能够分析搬运码垛机器人的工作需求和适用场景。
5.能够根据实际情况设计简单的搬运码垛机器人控制系统。
6.能够对搬运码垛机器人进行简单的故障排查和维护。
情感态度价值观目标:1.培养学生的科技创新意识,激发对机器人技术的兴趣。
2.培养学生珍惜劳动成果,尊重劳动的态度。
3.培养学生的团队合作精神,提高解决实际问题的能力。
二、教学内容本课程的教学内容主要包括以下几个部分:1.搬运码垛机器人的定义、分类和特点。
2.搬运码垛机器人的工作原理和基本结构。
3.搬运码垛机器人在工业生产中的应用场景。
4.搬运码垛机器人的控制系统设计。
5.搬运码垛机器人的故障排查和维护。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学。
包括:1.讲授法:用于讲解搬运码垛机器人的基本概念、工作原理和应用场景。
2.讨论法:通过小组讨论,让学生更深入地了解搬运码垛机器人的特点和优势。
3.案例分析法:分析实际案例,让学生了解搬运码垛机器人在工业生产中的应用。
4.实验法:让学生动手设计简单的搬运码垛机器人控制系统,提高实际操作能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:搬运码垛机器人相关教材,用于引导学生学习。
2.参考书:提供更多的相关知识,供学生自主学习。
3.多媒体资料:包括图片、视频等,用于直观展示搬运码垛机器人的工作原理和应用场景。
4.实验设备:提供实际的搬运码垛机器人设备,让学生进行实际操作和实验。
五、教学评估为了全面、客观、公正地评估学生的学习成果,本课程将采用多种评估方式相结合。
具体包括:1.平时表现:通过观察学生在课堂上的参与度、提问回答、小组讨论等表现,评估学生的学习态度和积极性。
搬运站课程设计一、课程目标知识目标:1. 学生能理解搬运站的基本概念,掌握其功能、分类及在生活中的应用。
2. 学生能掌握搬运站所需的基本物理知识,如力的合成、简单机械原理等。
3. 学生能了解搬运站的安全操作规程,认识到安全意识在搬运工作的重要性。
技能目标:1. 学生能运用所学知识,分析实际搬运工作中遇到的问题,并提出合理的解决方案。
2. 学生能通过小组合作,设计并制作一个简单的搬运站模型,提高动手操作能力和团队协作能力。
3. 学生能运用信息技术手段,收集、整理搬运站的相关资料,提高信息处理能力。
情感态度价值观目标:1. 学生通过学习搬运站相关知识,增强对物流行业的认识,激发对科学技术的兴趣。
2. 学生在学习过程中,培养认真观察、积极思考、主动探索的良好学习习惯。
3. 学生能够关注搬运站工作人员的辛勤付出,树立尊重劳动者、珍惜劳动成果的价值观念。
本课程针对四年级学生设计,结合学生好奇心强、动手能力逐渐提高的特点,注重理论与实践相结合,以激发学生的学习兴趣和参与度。
通过课程学习,使学生能够将所学知识应用于实际生活,提高解决实际问题的能力,同时培养良好的情感态度价值观。
二、教学内容1. 搬运站概述:介绍搬运站的概念、功能、分类以及在工业、物流等领域的应用。
教材章节:第二章第一节《搬运站的定义与功能》2. 搬运站物理知识:讲解力的合成、简单机械原理等基本物理知识,分析其在搬运站中的应用。
教材章节:第二章第二节《搬运站的物理知识》3. 搬运站安全操作规程:学习搬运站的安全操作要求,了解搬运过程中的安全注意事项。
教材章节:第二章第三节《搬运站的安全操作》4. 搬运站设计与制作:分组进行搬运站模型设计与制作,培养学生的动手操作能力和团队协作精神。
教材章节:第二章第四节《搬运站的设计与制作》5. 搬运站案例分析:分析实际搬运工作中的典型案例,引导学生运用所学知识解决实际问题。
教材章节:第二章第五节《搬运站案例分析》6. 信息技术在搬运站的应用:介绍信息技术在搬运站管理、优化等方面的应用,提高学生的信息处理能力。
码垛系统课程设计全套一、教学目标本课程的教学目标是使学生掌握码垛系统的基本原理、结构和工作流程,培养学生具备码垛系统的设计和应用能力。
具体分为以下三个部分:1.知识目标:(1)了解码垛系统的定义、分类和应用领域。
(2)掌握码垛系统的基本组成,包括传感器、执行器、控制器和通讯设备等。
(3)熟悉码垛系统的工作原理,包括检测、判断、执行和监控等环节。
2.技能目标:(1)能够分析码垛系统的需求,设计合适的码垛方案。
(2)能够运用编程语言实现码垛系统的控制程序。
(3)具备对码垛系统进行调试和维护的能力。
3.情感态度价值观目标:(1)培养学生对新技术的敏感度和学习兴趣,提高学生的主观能动性。
(2)培养学生具备团队协作精神,学会与他人共同解决问题。
(3)培养学生具备良好的职业道德,注重实际工作中的规范操作。
二、教学内容本课程的教学内容主要包括以下几个部分:1.码垛系统概述:介绍码垛系统的定义、分类和应用领域。
2.码垛系统的组成:讲解码垛系统的基本组成,包括传感器、执行器、控制器和通讯设备等。
3.码垛系统的工作原理:详细阐述码垛系统的工作原理,包括检测、判断、执行和监控等环节。
4.码垛系统的设计与应用:分析码垛系统的需求,设计合适的码垛方案,并运用编程语言实现控制程序。
5.码垛系统的调试与维护:讲解如何对码垛系统进行调试和维护,以确保其正常运行。
三、教学方法为了提高教学效果,本课程将采用以下几种教学方法:1.讲授法:通过讲解基本概念、原理和案例,使学生掌握码垛系统的基本知识。
2.讨论法:学生针对实际问题进行讨论,培养学生的思考能力和团队协作精神。
3.案例分析法:分析典型的码垛系统案例,使学生能够将理论知识应用于实际问题。
4.实验法:安排实验室实践环节,让学生动手操作,提高学生的实际操作能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选用国内权威出版的《码垛系统设计与应用》教材。
2.参考书:提供相关的专业书籍,供学生课后阅读拓展。
码垛搬运机器人课程设计一、课程目标知识目标:1. 学生能理解码垛搬运机器人的基本结构、工作原理及其在工业生产中的应用。
2. 学生能掌握机器人的编程控制方法,了解相关传感器的作用和使用方式。
3. 学生了解码垛搬运机器人在现代物流行业中的重要性,及其与其他自动化设备的协同工作原理。
技能目标:1. 学生能运用所学知识,设计并实现一个简单的码垛搬运机器人程序。
2. 学生能通过团队协作,完成机器人的组装、调试和优化,提高实际操作能力。
3. 学生能够运用批判性思维,分析和解决在机器人编程与操作过程中遇到的问题。
情感态度价值观目标:1. 培养学生对机器人技术及其在工业生产中应用的兴趣,激发创新意识。
2. 培养学生的团队协作精神,提高沟通与交流能力。
3. 增强学生对我国智能制造发展战略的认识,树立正确的价值观。
分析课程性质、学生特点和教学要求:本课程为选修课程,适用于高年级学生。
学生具备一定的物理、数学和信息技术基础。
课程旨在提高学生的实践操作能力、创新思维和团队协作能力。
教学要求注重理论联系实际,以项目为导向,鼓励学生动手实践,培养解决实际问题的能力。
通过课程学习,使学生能够将所学知识应用于实际生产和生活,为我国智能制造领域培养储备人才。
二、教学内容1. 机器人基础知识:包括机器人的定义、分类、应用领域,重点介绍码垛搬运机器人的基本结构和工作原理。
教材章节:第一章 机器人概述,第三节 机器人的应用。
2. 机器人编程与控制:介绍机器人编程的基本方法,如示教编程、离线编程等;讲解控制系统的组成和原理。
教材章节:第二章 机器人编程与控制,第一节 编程方法,第二节 控制系统。
3. 传感器与执行器:讲解传感器在机器人系统中的作用,介绍常用的传感器类型;阐述执行器的工作原理及其在码垛搬运机器人中的应用。
教材章节:第三章 传感器与执行器,第一节 传感器,第二节 执行器。
4. 码垛搬运机器人设计与实践:通过项目实践,让学生学会设计简单的码垛搬运程序,掌握机器人组装、调试和优化方法。
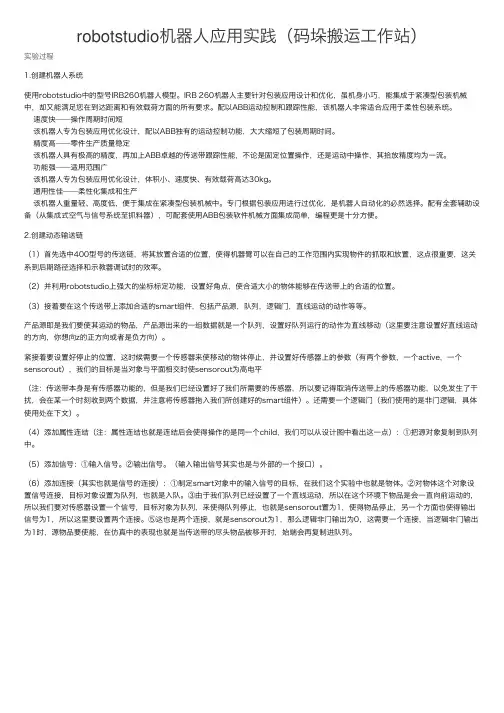
robotstudio机器⼈应⽤实践(码垛搬运⼯作站)实验过程1.创建机器⼈系统使⽤robotstudio中的型号IRB260机器⼈模型。
IRB 260机器⼈主要针对包装应⽤设计和优化,虽机⾝⼩巧,能集成于紧凑型包装机械中,却⼜能满⾜您在到达距离和有效载荷⽅⾯的所有要求。
配以ABB运动控制和跟踪性能,该机器⼈⾮常适合应⽤于柔性包装系统。
速度快——操作周期时间短该机器⼈专为包装应⽤优化设计,配以ABB独有的运动控制功能,⼤⼤缩短了包装周期时间。
精度⾼——零件⽣产质量稳定该机器⼈具有极⾼的精度,再加上ABB卓越的传送带跟踪性能,不论是固定位置操作,还是运动中操作,其拾放精度均为⼀流。
功能强——适⽤范围⼴该机器⼈专为包装应⽤优化设计,体积⼩、速度快、有效载荷⾼达30kg。
通⽤性佳——柔性化集成和⽣产该机器⼈重量轻、⾼度低,便于集成在紧凑型包装机械中。
专门根据包装应⽤进⾏过优化,是机器⼈⾃动化的必然选择。
配有全套辅助设备(从集成式空⽓与信号系统⾄抓料器),可配套使⽤ABB包装软件机械⽅⾯集成简单,编程更是⼗分⽅便。
2.创建动态输送链(1)⾸先选中400型号的传送链,将其放置合适的位置,使得机器臂可以在⾃⼰的⼯作范围内实现物件的抓取和放置,这点很重要,这关系到后期路径选择和⽰教器调试时的效率。
(2)并利⽤robotstudio上强⼤的坐标标定功能,设置好⾓点,使合适⼤⼩的物体能够在传送带上的合适的位置。
(3)接着要在这个传送带上添加合适的smart组件,包括产品源,队列,逻辑门,直线运动的动作等等。
产品源即是我们要使其运动的物品,产品源出来的⼀组数据就是⼀个队列,设置好队列运⾏的动作为直线移动(这⾥要注意设置好直线运动的⽅向,你想向z的正⽅向或者是负⽅向)。
紧接着要设置好停⽌的位置,这时候需要⼀个传感器来使移动的物体停⽌,并设置好传感器上的参数(有两个参数,⼀个active,⼀个sensorout),我们的⽬标是当对象与平⾯相交时使sensorout为⾼电平(注:传送带本⾝是有传感器功能的,但是我们已经设置好了我们所需要的传感器,所以要记得取消传送带上的传感器功能,以免发⽣了⼲扰,会在某⼀个时刻收到两个数据,并注意将传感器拖⼊我们所创建好的smart组件)。
机械课程设计码垛机一、课程目标知识目标:1. 学生能理解码垛机的基本结构、工作原理及在自动化生产线中的应用。
2. 学生掌握码垛机的主要组成部分及其功能,包括输送带、升降机构、夹持装置等。
3. 学生了解码垛机的电气控制系统,包括PLC编程、传感器应用等。
技能目标:1. 学生能够运用CAD软件绘制码垛机的基本结构图,并进行简单的设计计算。
2. 学生能够分析实际生产需求,设计合适的码垛方案,包括码垛方式、码垛速度等。
3. 学生掌握码垛机调试与维护的基本方法,具备解决简单故障的能力。
情感态度价值观目标:1. 学生培养对机械设计及自动化技术的兴趣,增强创新意识和实践能力。
2. 学生树立团队合作意识,学会在团队中发挥个人优势,共同解决问题。
3. 学生了解码垛机在工业生产中的重要性,认识到机械设计在提高生产效率、降低劳动强度方面的价值。
课程性质:本课程为机械课程设计,以实践性、应用性为主,结合理论知识,培养学生实际操作和设计能力。
学生特点:初三学生,具备一定的机械基础知识,对实际操作和设计具有好奇心和求知欲。
教学要求:结合课本内容,注重理论与实践相结合,强调学生在设计过程中的主体地位,提高学生的动手能力和创新能力。
通过课程目标的具体分解,使学生在完成学习任务的同时,达到预定的学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 码垛机基础知识:- 介绍码垛机的发展历程、分类及其在工业生产中的应用。
- 学习码垛机的基本结构、工作原理及性能参数。
2. 码垛机主要组成部分:- 输送系统:学习输送带的构造、工作原理及调速方法。
- 升降机构:了解升降机构的设计原理,学习其运动控制方法。
- 夹持装置:学习各种夹持装置的结构特点及其适用范围。
3. 电气控制系统:- PLC编程:学习PLC基本指令,掌握码垛机控制程序的编写方法。
- 传感器应用:了解常用传感器在码垛机上的应用,如位置传感器、压力传感器等。
4. 码垛机设计与实践:- 学习CAD软件绘制码垛机结构图,并进行简单的设计计算。
《工业机器人搬运工作站》课程教学大纲
一、课程基本信息
二、课程定位
工业机器人搬运工作站是工业机器人技术专业核心课程,该课程主要包括搬运机器人、工件自动识别系统、机器人运行轨迹编程等,使学生掌握工业机器人系统组成、系统在线编程的方法,为后续的工作站系统集成、工作站系统综合调试等能力培养打下基础。
三、课程目标
1.知识目标
1)熟悉工业机器人的操作安全知识;
2)熟悉工业机器人的种类和功能;
3)掌握工业机器人的系统构成;
4)掌握工业机器人坐标系相关知识;
5)掌握工业机器人功能指令相关知识;
6)熟悉工业机器人系统备份的相关知识。
2.能力目标
1)能安全规范的操作工业机器人;
2)能看懂工业机器人技术手册;
3)能根据具体应用选择相应的机器人坐标系;
4)能对工业机器人系统程序进行备份恢复;
5)能熟练手动操作工业机器人;
6)能通过示教器对工业机器人进行编程控制;
3.素质目标
1)具有操作机器人必备的保证人身安全和设备安全相应素质,能遵守机器人使用手册的相关安全条款。
2)具备工业机器人应用中的6S管理的基本能力。
3)具备机器人运用环境的选泽、安全措施的采用
四、课程内容
五、教学内容
4
5
六、课程重点难点及解决方案
七、教学评价。
码垛机器人课课程设计一、教学目标本节课的教学目标是让学生掌握码垛机器人的基本原理、组成部分及其在工业生产中的应用。
具体目标如下:1.知识目标:–了解码垛机器人的定义、功能和特点;–掌握码垛机器人的主要组成部分,如传感器、执行器、控制器等;–了解码垛机器人在工业生产中的应用场景。
2.技能目标:–能够分析码垛机器人的工作过程和工作原理;–能够根据实际需求设计简单的码垛机器人控制系统;–能够对码垛机器人进行维护和故障排除。
3.情感态度价值观目标:–培养学生对现代工业技术的兴趣和好奇心;–培养学生具备创新精神和团队合作意识;–培养学生具备良好的职业道德和责任感。
二、教学内容本节课的教学内容主要包括以下几个部分:1.码垛机器人的定义、功能和特点;2.码垛机器人的主要组成部分,如传感器、执行器、控制器等;3.码垛机器人在工业生产中的应用场景;4.码垛机器人的工作原理和控制系统设计;5.码垛机器人的维护和故障排除方法。
三、教学方法为了达到本节课的教学目标,我们将采用以下教学方法:1.讲授法:用于讲解码垛机器人的基本概念、工作原理和组成部分;2.案例分析法:通过分析实际案例,使学生了解码垛机器人在工业生产中的应用;3.实验法:让学生亲自动手操作码垛机器人,加深对理论知识的理解;4.讨论法:鼓励学生积极参与课堂讨论,培养团队合作意识和创新精神。
四、教学资源为了支持本节课的教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:《码垛机器人技术与应用》;2.参考书:相关学术论文和工业报告;3.多媒体资料:图片、视频、动画等;4.实验设备:码垛机器人模型、控制系统硬件和软件。
五、教学评估为了全面、客观地评估学生的学习成果,我们将采用以下评估方式:1.平时表现:通过观察学生在课堂上的参与度、提问回答、小组讨论等表现,评估学生的学习态度和积极性;2.作业:布置相关的练习题和研究报告,评估学生对知识的掌握和应用能力;3.考试:设置期末考试,评估学生对整个课程内容的掌握程度;4.实验报告:评估学生在实验过程中的操作技能和问题解决能力;5.自我评估:鼓励学生进行自我评估,反思自己的学习过程和成果。
多物料码垛课程设计一、教学目标本课程的教学目标是使学生掌握多物料码垛的基本原理和方法,能够运用相关知识进行实际操作。
具体目标如下:1.知识目标:学生需要了解多物料码垛的基本概念、分类及应用场景;掌握多物料码垛的关键技术和方法;了解多物料码垛领域的最新进展。
2.技能目标:学生能够运用多物料码垛理论知识进行实际问题的分析和解决;能够使用相关软件进行多物料码垛的设计和优化;具备多物料码垛的实际操作能力。
3.情感态度价值观目标:学生应该培养对多物料码垛技术的兴趣和热情,认识其对社会和经济发展的重要意义;树立科学思维和创新意识,提高解决实际问题的能力。
二、教学内容本课程的教学内容主要包括以下几个部分:1.多物料码垛基本概念:介绍多物料码垛的定义、分类及应用场景,使学生了解多物料码垛的基本情况。
2.多物料码垛关键技术:讲解多物料码垛的关键技术,包括码垛策略、码垛算法、码垛优化等,使学生掌握多物料码垛的核心技术。
3.多物料码垛方法:介绍常见的多物料码垛方法,如顺序码垛、矩阵码垛、层层码垛等,使学生了解不同码垛方法的优缺点及适用场景。
4.多物料码垛软件应用:教授如何使用相关软件进行多物料码垛的设计和优化,提高学生的实际操作能力。
5.最新研究进展:介绍多物料码垛领域的最新研究进展,使学生了解多物料码垛技术的发展动态。
三、教学方法为了达到本课程的教学目标,将采用以下教学方法:1.讲授法:通过讲解多物料码垛的基本概念、关键技术、方法及最新研究进展,使学生掌握相关知识。
2.案例分析法:分析实际案例,使学生了解多物料码垛技术在实际工程中的应用。
3.实验法:让学生动手操作,使用相关软件进行多物料码垛的设计和优化,提高实际操作能力。
4.讨论法:学生进行分组讨论,激发学生的思维和创新能力。
四、教学资源为了保证本课程的教学质量,将准备以下教学资源:1.教材:选择一本适合本课程的教材,作为学生学习的主要参考资料。
2.参考书:提供相关领域的参考书,丰富学生的知识体系。
多物料码垛课程设计一、课程目标知识目标:1. 学生能够理解多物料码垛的基本概念,掌握不同物料的特性及适用场景。
2. 学生能够掌握多物料码垛的操作流程和注意事项,了解相关安全知识。
3. 学生能够了解多物料码垛在现代物流行业中的应用和价值。
技能目标:1. 学生能够运用所学知识,独立完成多物料码垛操作,提高操作速度和准确性。
2. 学生能够分析实际生产中的多物料码垛问题,并提出合理的解决方案。
3. 学生能够通过团队协作,共同完成复杂的多物料码垛任务。
情感态度价值观目标:1. 学生能够培养对物流行业的兴趣,认识到多物料码垛在其中的重要作用。
2. 学生能够树立安全意识,遵循操作规程,养成良好的作业习惯。
3. 学生能够通过课程学习,增强团队协作能力,提高沟通表达能力。
课程性质:本课程为实践性较强的课程,结合理论知识与实际操作,旨在培养学生具备多物料码垛的操作技能及安全意识。
学生特点:学生具备一定的物流基础知识,动手能力强,对实际操作有较高的兴趣。
教学要求:教师需结合课本内容,以实际操作为主,注重培养学生的动手能力和解决问题的能力。
同时,关注学生的情感态度价值观培养,提高学生的综合素质。
在教学过程中,将课程目标分解为具体的学习成果,以便进行教学设计和评估。
二、教学内容本课程教学内容主要包括以下几部分:1. 多物料码垛基础知识- 理解码垛的基本概念、分类及适用场景。
- 学习不同物料的特性,如重量、体积、形状等。
2. 多物料码垛操作流程与技巧- 掌握多物料码垛的操作步骤,包括准备、摆放、整理等。
- 学习码垛设备的正确使用方法和注意事项。
3. 安全知识及操作规范- 了解多物料码垛过程中的安全风险,如货物滑落、砸伤等。
- 学习安全操作规程,提高安全意识。
4. 实际案例分析与应用- 分析实际生产中的多物料码垛案例,总结经验教训。
- 学习如何根据实际需求,调整码垛方案,提高工作效率。
5. 团队协作与沟通表达- 培养学生在多物料码垛过程中的团队协作能力。