机械精度设计的作业题答案 (1)
- 格式:ppt
- 大小:1.58 MB
- 文档页数:66



第一章绪论参考答案一、判断题(正确的打√,错误的打×)1.不经挑选,调整和修配就能相互替换,装配的零件,装配后能满足使用性能要求,就是具有互换性的零件。
(√)2.互换性原则中适用于大批量生产。
(╳)3.为了实现互换性,零件的公差应规定得越小越好。
(╳)4.国家标准中,强制性标准是一定要执行的,而推荐性标准执行与否无所谓。
(╳)5.企业标准比国家标准层次低,在标准要求上可稍低于国家标准。
(╳)6.厂外协作件要求不完全互生产。
(╳)7.装配时需要调整的零、部件属于不完全互换。
(√)8.优先数系包含基本系列和补充系列,而派生系列一定是倍数系列。
(╳)9.产品的经济性是由生产成本唯一决定的。
(╳)10.保证互换的基本原则是经济地满足使用要求。
(√)11.直接测量必为绝对测量。
( ×) (绝对、相对测量:是否与标准器具比较)12.为减少测量误差,一般不采用间接测量。
( √)13.为提高测量的准确性,应尽量选用高等级量块作为基准进行测量。
( ×)14.使用的量块数越多,组合出的尺寸越准确。
(×)15.0~25mm千分尺的示值范围和测量范围是一样的。
( √)16.用多次测量的算术平均值表示测量结果,可以减少示值误差数值。
( ×)17.某仪器单项测量的标准偏差为σ=0.006mm,若以9次重复测量的平均值作为测量结果,其测量误差不应超过0.002mm。
( ×误差=X-X0)18.测量过程中产生随机误差的原因可以一一找出,而系统误差是测量过程中所不能避免的。
( ×)19.选择较大的测量力,有利于提高测量的精确度和灵敏度。
( ×)20.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √)四问答题1什么叫互换性?为什么说互换性已成为现代机械制造业中一个普遍遵守原则?列举互换性应用实例。
(至少三个)。
答:(1)互换性是指机器零件(或部件)相互之间可以代换且能保证使用要求的一种特性。
机械精度设计与检测基础课后习题答案一.1、按优先数的基本系列确定优先数: (1) 第一个数为10,按R5系列确定后五项优先数。
解:后五项优先数是16,25,40,63,100。
(2) 第一个数为100,按R10/3系列确定后三项优先数。
解:后三项优先数是200,400,800。
2、试写出R10优先数系从1~100的全部优先数(常用值)。
解:R10优先数系从1~100的全部优先数是1,1.25,1.6,2,2.5,3.15,4,5,6.3,8,10,12.5,16,20,25,31.5,40,50,63,80,100。
3、普通螺纹公差自3级精度开始其公差等级系数为:0.50,0.63,0.80,1.00,1.25,1.60,2.00。
试判断它们属于优先数系中的哪一种?其公比是多少?解:它们属于R10 (0.50,2.00),公比是1.25。
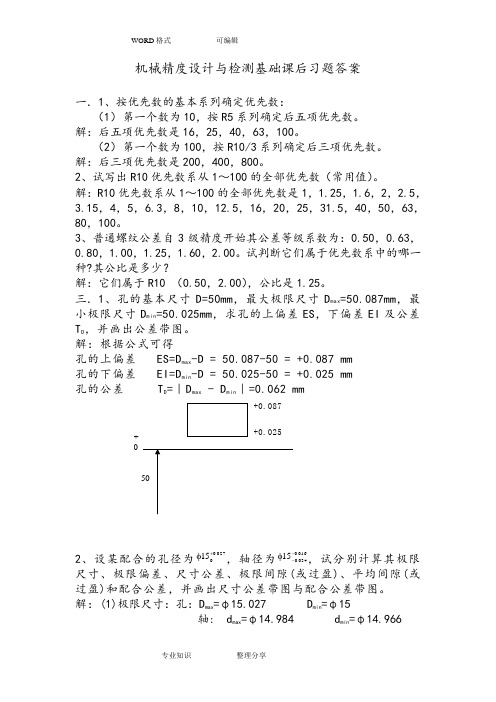
三.1、孔的基本尺寸D=50mm ,最大极限尺寸D max =50.087mm ,最小极限尺寸D min =50.025mm ,求孔的上偏差ES ,下偏差EI 及公差T D ,并画出公差带图。
解:根据公式可得孔的上偏差 ES=D max -D = 50.087-50 = +0.087 mm 孔的下偏差 EI=D min -D = 50.025-50 = +0.025 mm 孔的公差 T D =︱D max - D min ︱=0.062 mm2、设某配合的孔径为027.0015+φ,轴径为016.0034.015--φ,试分别计算其极限尺寸、极限偏差、尺寸公差、极限间隙(或过盈)、平均间隙(或过盈)和配合公差,并画出尺寸公差带图与配合公差带图。
解:(1)极限尺寸:孔:D max =φ15.027 D min =φ15轴: d max =φ14.984 d min =φ14.966+ 0 -+0.087+0.02550(2)极限偏差:孔:ES=+0.027 EI=0轴:es= -0.016 ei= -0.034 (3)尺寸公差:孔:T D =|ES-EI|= |(+0.027)-0|=0.027 轴:T d = |es-ei|=|(-0.016)-(-0.034)|=0.018(4)极限间隙:X max = ES -ei=(+0.027)-(-0.034)=+0.061 X min = EI -es=0-(-0.016)=+0.016 平均间隙()0385.021min max +=+=X X X av(5)配合公差:T f = T D + T d =0.027+0.018=0.045 (6)尺寸公差带和配合公差带图,如图所示。

西交作业答案网1.保证互换性生产的基础是()。
A.标准化B.生产现代化C.大批量生产D.协作化生产2.基本偏差代号f的基本偏差是()。
A.ESB.EIC.esD.ei3.f30g6与f30g7两者的区别在于()。
A.基本偏差不同B.下偏差相同,而上偏差不同C.上偏差相同,而下偏差不同D.公差值相同4.一般配合尺寸的公差等级范围为()。
A.IT1~IT7B.IT2~IT5C.IT5~IT13D.IT8~IT145.当相配孔、轴既要求对准中心,又要求装拆方便时,应选用()。
A.间隙配合B.过盈配合C.过渡配合D.间隙配合或过渡配合6.形位公差带的形状决定于()A.形位公差特征项目B.形位公差标注形式C.被测要素的理想形状D.被测要素的理想形状、形位公差特征项目和标注形式7.在图样上标注形位公差要求,当形位公差前面加注Φ时,则被测要素的公差带形状应为()。
A.两同心圆B.圆形或圆柱形C.两同轴线圆柱面D.圆形、圆柱形或球形8.径向全跳动公差带的形状和()公差带的形状相同。
A.同轴度B.圆度C.圆柱度D.位置度9.某实际被测轴线相对于基准轴线的最近点距离为04mm,最远点距离为08mm,则该实际被测轴线对基准轴线的同轴度误差为()。
A.04mmB.08mmC.012mmD.16mm10.矩形花键联结采用的基准制为()。
A.基孔制B.基轴制C.非基准制D.基孔制或基轴制11.最大实体尺寸是指()。
A.孔和轴的最大极限尺寸B.孔和轴的最小极限尺寸C.孔的最小极限尺寸和轴的最大极限尺寸D.孔的最大极限尺寸和轴的最小极限尺寸12.尺寸公差与形位公差采用独立原则时,零件加工后的实际尺寸和形位误差中有一项超差,则该零件()。
A.合格B.尺寸最大C.不合格D.变形最小13.公差原则是指()。
A.确定公差值大小的原则B.制定公差与配合标准的原则C.形状公差与位置公差的关系D.尺寸公差与形位公差的关系14.被测要素的尺寸公差与形位公差的关系采用最大实体要求时,该被测要素的体外作用尺寸不得超出()。
机械精度设计基础习题答案【篇一:机械精度试题(答案版)】工误差控制在给定的范围内。
( √ )8、圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
( √ )13、配合公差的数值愈小,则相互配合的孔、轴的公差等级愈高。
( √ )14、一般来说,需要严格保证配合性质时,应采用包容要求。
( √ )18.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √ )19.若某平面对基准的垂直度误差为0.05mm,则该平面的平面度误差一定小于等于0.05mm.。
它是符合要求的。
( √ )27.选用优先数列时,应按照先疏后密的规则进行选取,以避免规格过多。
( √ )29.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √ )31.汽车发动机曲轴和凸轮轴上的正时齿轮,车床主轴与丝杠之间的交换齿轮,主要要保证其传动的准确性。
( √ ) 36.若被测要素相对于基准的方向和位置关系以理论正确尺寸标注,则其公差带的方向和位置是固定的。
( √ ) 37.量块按“级”使用时,应以其标称值作为工作尺寸,该尺寸包含了量块的制造误差1、?30g6与?30g7两者的区别在于( c)c.上偏差相同,而下偏差不同2、一般配合尺寸的公差等级范围为( c) c.it5~it133、当相配孔、轴既要求对准中心,又要求装拆方便时,应选用( c) c.过渡配合4、形位公差带的形状决定于( d) d.被测要素的理想形状、形位公差特征项目和标注形式b.圆形或圆柱形6、下列四组配合中配合性质与?40h7/k6相同的一组是( c )C、?40k7/h67、用功能量规控制形状误差大小的方法适用于( b )b、生产现场8、下列四个形位公差特征项目中公差带形状与径向全跳动公差带形状相同的那个公差项目是( b )b、圆柱度9、用立式光学比较仪测量?25m6轴的方法属于( b ) b、相对测量10、利用同一种加工方法,加工?50h6孔和?100h7孔,应理解为( a )A、前者加工困难11、下列说法不正确的有( c ) c、用于高速传动的齿轮,一般要求载荷分布均匀;12、测量与被测几何量有一定函数关系的几何量,然后通过函数关系式运算,获得该被测几何量的量值的方法,称为( d ) d、间接测量法13、某阶梯轴上的实际被测轴线各点距基准轴线的距离最近为2 ?m,最远为4 ?m,则同轴度误差值为( c ) C、?8?m14、一般来说,下列哪一个表面粗糙度要求最高。
第一章 结构设计中的静力学平衡1-1 解:力和力偶不能合成;力偶也不可以用力来平衡。
1-2 解:平面汇交力系可以列出两个方程,解出两个未知数。
取坐标系如图,如图知 ()100q x x = 1-3 解:则载荷q(x) 对A 点的矩为1()()(2)66.7()A M q q x x dx KN m =⋅-≈⋅⎰1-4 解:1)AB 杆是二力杆,其受力方向如图,且 F A ’=F B ’2)OA 杆在A 点受力F A ,和F A ’是一对作用力和反作用力。
显然OA 杆在O 点受力F O ,F O 和F A 构成一力偶与m 1平衡,所以有 1sin300A F OA m ⋅⋅︒-=代入OA = 400mm ,m 1 = 1N ⋅m ,得 F A =5N 所以F A ’=F A =5N , F B ’= F A ’=5N ,即 杆AB 所受的力S =F A ’=5N3)同理,O 1B 杆在B 点受力F B ,和F B ’是一对作用力和反作用力,F B =F B ’=5N ;且在O 1点受力F O1,F O1和F B 构成一力偶与m 2平衡,所以有 210B m F O B -⋅= 代入O 1B =600mm ,得 m 2=3N.m 。
1-5 解:1)首先取球为受力分析对象,受重力P ,墙 壁对球的正压力N 2和杆AB 对球的正压力N 1,处于平衡。
有:1sin N P α⋅= 则 1/s i n N P α=2)取杆AB 进行受力分析,受力如图所示, 杆AB 平衡,则对A 点的合力矩为0: 1()cos 0A M F T l N AD α=⋅⋅-⋅=3)根据几何关系有(1cos )sin tan sin a a a AD αααα+=+=最后解得:2211/cos 1sin cos cos Pa Pa T l l αααα+=⋅=⋅- 当2cos cosαα-最大,即α=60°时,有T min =4Pa/l 。
( √ )1、为使零件的几何参数具有互换性,必须把零件的加工误差控制在给定的范围内。
( × )2、公差是零件尺寸允许的最大偏差。
( × )3、从制造角度讲,基孔制的特点就是先加工孔,基轴制的特点就是先加工轴。
( √ )4、Φ10E7、Φ10E8、Φ10E9三种孔的上偏差各不相同,而下偏差相同。
( × )5、有相对运动的配合应选用间隙配合,无相对运动的配合均选用过盈配合。
( × )6、若某平面的平面度误差值为0.06mm ,则该平面对基准的平行度误差一定小于0.06mm 。
( × )7、选用派生系列时应优先选用公比较小和延伸项含有项值1的数列。
( √ )8、圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
( × )9、过渡配合可能有间隙,也可能有过盈,因此过渡配合可以算间隙配合,也可以算过盈配合。
( × )10、基本尺寸不同的零件,只要它们的公差值相同,就可以说明它们的精度要求相同。
( × )11、选择较大的测量力,有利于提高测量的精确度和灵敏度。
( √ )12、误差值越小则测量精度越高,误差值越大则测量精度越低。
( √ )13、配合公差的数值愈小,则相互配合的孔、轴的公差等级愈高。
( √ )14、一般来说,需要严格保证配合性质时,应采用包容要求。
( × )15、形位公差带都是按几何概念定义的,与测量方法无关。
( √ )16、若被测要素相对于基准方向和位置关系以理论正确尺寸标注则其公差带方向和位置是固定的. ( √ )17、零件尺寸误差同位置误差采用独立原则时,位置误差应作为组成环列入尺寸链。
( √ )18.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √ )19.若某平面对基准的垂直度误差为0.05mm ,则该平面的平面度误差一定小于等于0.05mm.。
( × )20.只要离基准轴线最远的端面圆跳动不超过公差值,则该端面的端面圆跳动一定合格。