平面机构组成基本原理与其自由度分析
- 格式:ppt
- 大小:876.50 KB
- 文档页数:59
平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。

第2章平面机构运动简图及自由度」机构是用运动副连接起来的构件系统,其中有一个构件为机架,是用来传递运动和力的。
机构还可以用来改变运动形式。
机构务构件之间必须有确左的相对运动。
然而,构件任意拼凑起来是不一泄具有确左运动的。
三杆构件组合体用较链连接成的组合体,但各构件之间无相对运动,所以它不是机构。
教材, 当只给定1构件的运动规律时,其余构件的运动并不确定。
构件究竟应如何组合,才具有确定的相对运动?这对分析现有机构或机构的创新设计是很重要的。
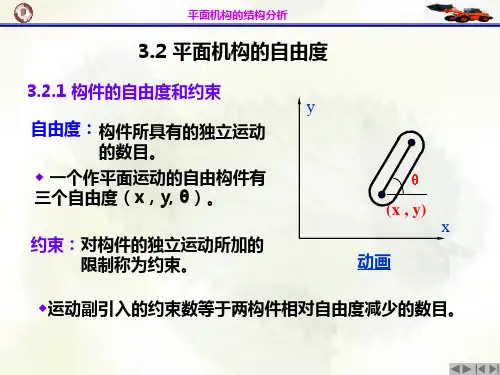
2—1 平面机构的组成一、构件的自由度构件是机构中运动的单元体,因此它是组成机构的基本要素。
构件的自由度是构件可能出现的独立运动。
任何一个构件在空间自由运动时皆有六个自由度。
如教材图所示,它可表达为在直角坐标系内沿着三个坐标轴的移动和绕三个坐标轴的转动。
而对于一个作平而运动的构件,则只有三个自由度,构件AB 可以在xoy平而内可以在任一点绕z轴转动,也可沿x轴或y轴方向移动。
二、约束与运动副平而机构中每个构件都不是自由构件,而以一定的方式与幷他构件组成动联接。
这种使两构件直接接触并能产生一运动的联接,称为运动副,两构组成运动副后,就限制了构件的独立运动,两构件组成运动副时构件上参加接触的点、线、而称为运动副元素,显然运动副也是组成机构的主要要素。
两构件组成运动副后,就限制了两构件间的相对运动,对于相对运动的这种限制称为约朿。
根据组成运动副两构件之间的接触特性,运动副可分为低副和高副,三、运动副及其分类1. 低副两构件以面接触的运动副称为低副。
根拯它们之间的相对运动是转动还是移动,运动副又可分为转动副和移动副。
(1) 转动副若组成运动副的两构件之间只能绕某一轴线作相对转动的运动副。
通常转动副的具体形式是用较链连接,即由圆柱销和销孔所构成的转动副,如图所示。
(2)移动副若组成运动副的两构件只能作相对直线移动的运动副。
如图所示.活塞与气缸体所组成的运动副即为移动副。
平面机构中的低副引入两个约朿,仅保留一个自由度。
平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。
平面机构的运动简图及自由度平面机构的组成运动副及其分类运动副机构:是由两个以上的构件以一定的方式连接而成。
在连接处保持一定的相对运动。
运动副:由两个构件直接接触并产生一定相对运动的连接。
运动副的分类接触方式包括点,线,面三种。
分为低副和高副。
低副:两构件通过面接触所构成的运动副。
又分为转动副和移动副。
转动副:组成运动副的两个构件之间只能绕同一轴线作相对转动。
移动副:组成运动副的两个构件之间只能沿着某一轴线方向相对移动。
高副:两构件之间以点或线相接触所组成的运动副。
组成高副的两个构件间的相对运动为转动兼移动,即绕接触点(线)的转动和沿着接触处切线方向的移动。
自由度与约束自由度:构件可能出现独立运动的数目。
在一个平面内自由运动的构件具有三个自由度。
约束:对物体运动的限制条件。
引一个约束条件,构件将减少一个自由度。
组成转动副的构件只能绕同一轴线作相对运动,引入了两个约束,保留一个自由度;组成移动副的构件只能沿某一轴线作相对运动,也引入两个约束,保留了一个自由度;组成高副的构件的相对运动是转动兼移动,引入一个约束,保留了两个自由度。
机构中构件的分类和组成原动件:机构中接受外部给定运动规律的构件。
从动件:机构中除了原动件以外,随着原动件的运动而运动的其余可动构件。
机架:在机构中固定不动的构件。
用于支承可动构架。
平面机构的运动简图机构运动简图:在分析现有的机构或设计新机构时,为了使问题简化,常常略去机构中构件的复杂外形和运动副的具体结构,仅用简单的线条和符号表示构件的运动副,并按一定的比例定出个运动副的相对位置,而绘制出能表示构件运动特性的简单图形。
机构示意图:仅表明机构的结构状况,也不可按严格比例绘制的简图。
构件和运动副的表示方法构件用线段或小方块表示,有时也画成支架的形式。
运动副(1)转动副转动轴线垂直于图面,小圆圆心处为两构件相对转动轴线的位置,轴线垂直于图面;有的转动轴线与图面平行,画有阴影线的构件为机架。