第一章 平面机构组成原理及其自由度分析
- 格式:ppt
- 大小:4.18 MB
- 文档页数:70
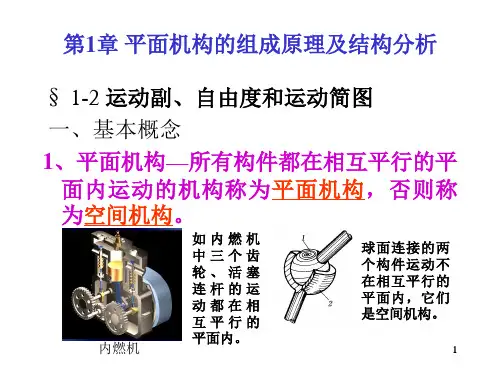
第一章平面机构的结构分析本章主要内容:1)平面机构运动简图的绘制2)平面机构自由度的计算及机构具有确定运动的条件3)机构的组成原理及结构分析1-1. 研究机构结构的目的(1) 探讨机构运动的可能性及其具有确定运动的条件(2) 将各种机构按结构加以分类,并按分类建立运动分析和动力分析的一般方法(3) 了解机构的组成原理(4) 绘制机构运动简图1-2. 运动副、运动链和机构一、运动副基本概念:1运动副:两构件直接接触形成的可动联接运动副1 运动副2 运动副2运动副元素:参与接触而构成运动副的点、线、面。
3自由度:构件所具有的独立运动的数目4约束:对独立运动所加的限制运动副的分类:1根据运动副的接触形式,运动副归为两类:1)低副:面接触的运动副。
如转动副、移动副。
2)高副:点或线接触的运动副。
如齿轮副、凸轮副。
2根据两构件的空间运动形式,可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空间运动。
如螺旋副,球面副运动副的约束特点:具有两个约束而相对自由度等于一的平面运动副:转动副和移动副。
具有一个约束而相对自由度等于二的运动副:高副约束一个相对转动而保留两个相对移动的运动副是不可能存在的。
二、运动链•运动链:两个以上构件以运动副联接而成的系统。
•闭链:组成运动链的每个构件至少包括两个运动副元素,该运动链为封闭系统。
•开链:运动链中有的构件只包含一个运动副元素。
三、机构从运动链的角度,机构需具有下列特点:•1) 运动链中有机架•2) 各构件间有确定的运动1-3.平面机构运动简图一、机构运动简图的定义及作用说明机构各构件间相对运动关系的简单图形.机构运动简图是用规定的运动副符号及代表构件的线条来表示构件和运动副,并按一定比例表示各运动副的相对位置.•组成:线条和符号•符号:表示运动副二、机构运动简图的绘制1.运动副的表示符号:1)两构件构成转动副2)两构件构成移动副3)两构件组成平面高副用两构件接触点(线)附近的两段轮廓表示2.构件的表示方法将该构件上的运动副元素按其位置表示出来,再用简单的线条将这些运动副联接起来,就可表示这个构件。
平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。

01平面机构的自由度和速度分析平面机构是最基本的机械结构之一,广泛应用于机械工程中。
对于平面机构的自由度和速度分析是研究机构运动特性和设计优化的重要内容之一、本文将对平面机构的自由度和速度分析进行详细阐述。
一、平面机构的自由度分析自由度是指机构中运动自由的独立参数个数,即描述机构运动特性的最小信息单位。
对于平面机构而言,其自由度可以通过分析机构中的运动副个数进行计算。
1.单刚性连杆机构的自由度分析单刚性连杆机构是最简单的平面机构,由若干个刚性连杆组成,连接点上的关节用铰链连接。
在单刚性连杆机构中,关节的个数可以通过Euler公式计算:f = 3n - m - 2,其中f为机构的自由度,n为连杆数目,m为连接关节的个数。
根据Euler公式,当机构中的连杆数目和连接关节的个数已知时,就可以得到机构的自由度。
2.多刚性连杆机构的自由度分析多刚性连杆机构是由多个单刚性连杆机构组成的机构。
通过分析机构中的连杆数目和连接关节的个数,同样可以得到机构的自由度。
与单刚性连杆机构相似,多刚性连杆机构的自由度可以通过Euler公式进行计算。
3.灵活性连杆机构的自由度分析灵活性连杆机构是由柔性杆件构成的机构。
由于柔性杆件的存在,机构的自由度在一定程度上受到限制。
灵活性连杆机构的自由度分析可以通过变分原理进行研究,将柔性杆件的变形引入到计算中,得到机构的自由度。
二、平面机构的速度分析平面机构的速度分析是指研究机构中各点的速度和加速度特性。
根据机构的不同类型和运动特性,速度分析可以采用不同的方法。
1.单刚性连杆机构的速度分析对于单刚性连杆机构,速度分析可以通过运动相对性原理进行计算。
根据运动相对性原理,机构中各点的速度相对于机构中其中一固定点的速度可以通过对机构进行平移和旋转变换得到。
通过变换矩阵的乘积,可以得到机构中各点的速度。
2.多刚性连杆机构的速度分析多刚性连杆机构的速度分析比单刚性连杆机构的速度分析复杂一些。
根据机构的运动特性和几何约束条件,可以通过求解速度方程组得到机构中各点的速度。
江苏省高等教育自学考试27972机械设计根底考试重点机械设计根底复习第一局部机械原理第一章平面机构组成原理及其自由度分析1机构是一种具有确定运动的人为实物组合体。
机构的组成要素是构件和运动副。
2零件与构件的区别:零件是加工单元体,而构件是运动单元体。
“构件”是由一个或几个零件刚性地连接在一起所组成的刚性系统,在同一构件中各零件之间无相对运动。
在机构中各个独立运动的最根本单元体即为“构件”。
3构件与构件之间直接接触的可动联接称为运动副。
面接触(面接触压强低)的运动副称为低副,点或线接触(压强高)的运动副称为高副。
根据组成平面低副的相对运动性质又可将其分为转动副和移动副。
4每个转动副或移动副都引入二个约束;每个高副都引入一个约束。
(本书只讨论平面运动副,平面运动副只有3个约束、空间运动副有6个约束)构件用运动副联接而成的相对可动的系统称为运动链,可分为闭式链与开式链两大类。
5机构运动简图:用国标规定的简单符号和线条代表运动副和构件,(读懂)并按一定的比例尺表示机构的运动尺寸,绘制出机构的简明图形称为机构运动简图。
如不考虑比例,称为机构运动示意图。
6机构运动简图绘制步骤中注意:选择适当的长度比例尺(=实际尺寸(m)/图示长度(mm)), 该比例尺与制图中的比例正好相反。
7 运动副对该两构件独立运动所加的限制称为约束,约束数目等于被其限制的自由度数。
组成运动副两构件间约束的特点和数目取决于该运动副的形式。
平面机构中,一个独立作平面运动的构件具有三个自由度。
转动副和移动副(2个约束、1个自由度)高副(1个约束、2个自由度)平面机构自由度计算公式(重点): F-平面机构的自由度;n-活动构件数(不包括机架);PL-低副数;PH-高副数。
8 机构可能运动的条件为:机构自由度数大于等于1,如为0及负数,那么零件间无相对运动,只为构件。
机构具有确定运动的条件:机构原动件数=机构的自由度F。
9 计算机构自由度时应注意的问题:复合铰链、局部自由度、虚约束 9-1 复合铰链:k个(2个以上)构件在同一处以转动副相联接,所构成的运动副称为复合铰链,那么其转动副数为(k-1)个。