汽车发电机双三相波绕组的分析和设计
- 格式:pdf
- 大小:419.58 KB
- 文档页数:3
三相电机两相绕组计算三相电机是一种常用的交流电动机,它由三个相互独立的绕组组成。
而两相绕组是一种特殊的绕组方式,适用于一些特定的应用场合。
接下来,我将详细介绍三相电机两相绕组的计算方法。
首先,我们需要了解两相绕组的概念。
两相绕组是指将三相电机的三个绕组中的两个绕组相互连接,而第三个绕组单独使用。
这样的绕组方式多用于对称旋转场的应用,如杀绳绞车、卷扬机等。
计算两相绕组的关键是确定每个绕组的匝数和互感系数。
在两相绕组中,我们通常将一个绕组称为主绕组,另一个绕组称为次绕组。
主绕组是直接与电源连接的绕组,次绕组是通过主绕组和第三个绕组之间的互感作用来实现能量传递的。
接下来,我将详细介绍两相绕组的计算步骤。
1.确定主绕组和次绕组的电压比在两相绕组中,主绕组和次绕组有相同的线圈数,但电压比不同。
通过电压比,我们可以确定主绕组和次绕组的匝数。
主绕组和次绕组的电压比可以根据具体的应用要求进行设定。
2.确定主绕组和次绕组的匝数通过电压比,我们可以根据绕组的电压和电压比来确定主绕组和次绕组的匝数。
主绕组的匝数=电源电压×电源相数/主绕组电压比次绕组的匝数=电源电压×电源相数/次绕组电压比其中,电源电压是指三相电源的电压,电源相数是指三相电源的相数。
3.确定主绕组和次绕组的互感系数在两相绕组中,主绕组和次绕组之间的互感系数是通过电机的设计来确定的。
在计算过程中,我们通常采用经验公式或仿真软件来确定互感系数。
根据互感系数,可以计算出两相绕组之间的耦合系数。
耦合系数=互感系数×主绕组匝数/次绕组匝数4.计算两相绕组的电感值两相绕组的电感值可以通过互感系数和各绕组的电感值来计算。
主绕组的电感值=主绕组匝数²/耦合系数次绕组的电感值=次绕组匝数²/耦合系数根据以上计算步骤,我们可以得到两相绕组的各项参数。
在实际应用中,我们可以根据具体的需求来调整绕组的参数,以满足系统的要求。

三相多绕组磁场的空间运动特性分析及应用的开题报告
一、选题的背景和意义
随着电力系统的不断发展和完善,多相电机已成为电力系统中重要的组成部分。
其中,三相电机是应用最广泛的种类。
然而,三相电机由于使用多个绕组,其磁场分
布比单相电机更复杂,因此研究三相多绕组磁场的空间运动特性对于提高电机性能与
效率、增强电机运行的可靠性具有重要的意义。
二、选题的研究内容和思路
本文旨在通过对三相多绕组电机磁场的空间动态特性进行分析,深入探讨其运动规律并应用于实际问题中。
具体研究内容如下:
1.对三相多绕组磁场的基本原理和分布进行介绍和探究;
2.研究三相多绕组磁场的空间运动特性,分析其运动规律;
3.通过实验和仿真,验证三相多绕组磁场的运动规律,并分析其影响因素;
4.分析三相多绕组磁场的空间运动特性在电机设计和性能提高中的应用前景。
三、预期的研究成果与意义
本文的预期研究成果如下:
1.深入探究三相多绕组磁场的空间运动特性,提高对电机磁场运动规律的认识;
2.分析三相多绕组磁场空间运动特性的影响因素,为电机设计和优化提供参考;
3.验证三相多绕组磁场的运动规律,为实际电机的运行和维护提供技术支持;
4.深入研究三相多绕组磁场在电机设计和性能提高中的应用前景,为电力系统的发展提供参考。
综上所述,研究三相多绕组磁场的空间运动特性具有重要的现实意义和理论价值。
汽车三相交流发电机的原理构造及其应用
汽车三相交流发电机是一种常见的发电装置,它通过特定的原理构造来产生交流电并应用于汽车的电力系统中。
我们来了解一下汽车三相交流发电机的原理构造。
汽车三相交流发电机由转子和定子两部分组成。
转子是由永磁体或电磁体组成的,它与发动机通过传动带或链条相连,当发动机运转时,转子也会随之旋转。
而定子则是由线圈和铁芯构成的,它固定在发电机的壳体上。
当转子旋转时,通过磁感应的作用,定子线圈中会产生电磁感应,从而产生交流电。
汽车三相交流发电机的应用非常广泛。
首先,它为汽车提供了所需的电力,包括启动电机、点火装置、车灯、音响等各种电气设备。
其次,发电机还可以将多余的电能储存到汽车电池中,以备不时之需。
此外,一些高级汽车还配备了智能发电机控制系统,能够根据电力需求自动调节发电机的输出功率,提高能源利用效率。
汽车三相交流发电机通过转子和定子的相互作用,利用电磁感应原理来产生交流电。
它在汽车电力系统中起着至关重要的作用,为汽车提供所需的电力,并能将多余的电能储存起来。
随着科技的不断进步,汽车发电机的性能和效率也在不断提高,为人们的出行提供了更加便利和舒适的体验。
发电机的三相绕组
发电机的三相绕组是发电机内部用来产生三相交流电的关键组件。
在一台三相交流发电机中,通常包含定子绕组和转子绕组两个主要部分。
定子绕组:定子绕组安装在发电机的定子铁芯上,由多组线圈
按照一定的排列顺序和连接方式构成。
在三相发电机中,定子绕组通常被设计成三相对称绕组,彼此在空间上间隔120度电角度,形成星形(Y型)或三角形(Delta型)连接。
每一相绕组由多个线圈(或线圈组)组成,当转子旋转时,这些线圈切割由转子产生的旋转磁场,进而感应出三相交流电。
转子绕组:转子绕组则位于发电机的转子内部,它的结构依发
电机类型的不同而不同。
在同步发电机中,转子常常带有永磁体或带有直流励磁绕组的磁极,通过外部电源提供励磁电流,形成稳定的旋转磁场。
而在异步发电机(如鼠笼式转子或绕线式转子电机)中,转子绕组的工作原理主要是通过与定子磁场的相互作用产生感应电流
和电磁转矩。
三相绕组的工作原理基于电磁感应定律,即当转子旋转时,定子绕组中的磁通发生变化,根据法拉第电磁感应定律会产生交流电压。
这种电压按照正弦规律变化,并且三相之间相差120度,形成了我们所说的三相交流电。
这种三相电源广泛应用于工业生产和供电系统中。
三相双层波绕组所谓交流电机的波绕组就是任何两个串联线圈沿线制方向象波浪似地前进。
其主要特点是一个线圈和相邻同性磁极下的线圈相串联。
我们用合成节距y来表征波绕组的连接规律,合成节距y是指每串联一个线圈时,绕组沿绕制方向前进了多少槽。
由于波绕组是依次把同极性下的线圈串联起来,每次前进约对极距()。
故对整数槽波绕组来说,合成节距y通常选为一对极距,即(1)但当合成节距这样选择时,在绕组串联p个线圈(沿定子绕了一周)后,绕组将回到原来出发的槽号而自行闭合。
也就无法将属于同一相的线圈连接起来,为了把所有属于同一相的线圈全部连接起来,每绕完一圈之后,必须人为地前进或后退一个槽,才能使绕组继续地绕下去。
下面用具体例子来说明。
绘波绕组展开时,首先应确定线圈的各种节距,设选合成节距,第一节距y1=7,和双层叠绕组一样,定义线圈的序号即为线圈上圈边的序号,现以A相为例说明具体接法。
属于A相S极的线圈有:1、2、3、19、20、21,属于A 相N极的线圈有:10、11、12、28、29、30。
设从S1极下槽3开始,按合成节距y将属于A相S极下的线圈串联,连接顺序如下:3+18=2121+18-36-1=22+18=20 20+18-36-1=11+18=19同样,将属于A相N极下的线圈串联12+18=3030+18-36-1=1111+18=2929+18-36-1=1010+18=28然后将这两个线圈组串联起来:,构成A相绕组。
图三相双层波绕组的展开图(A相)从此可见,当波绕组采用时的连接规律是:绕组沿电枢表面绕行q圈,把所有上层边的S极下属一相的线圈按一定顺序串联起来,构成相绕组的一半,然后再沿电枢表面绕行q圈,把所有上层边的N极下属于同一相的线圈也按同样的规律串联起来,构成相绕组的另一半。
这两半之间既可串联,也可并联,视所需支路数而定。
当串联时(如上面所述的连接方式)则得=1,如果并联(A1和X2连接作为头A,A2和X1连接作为尾X),则得=2。
第27卷㊀第5期2023年5月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.5May 2023㊀㊀㊀㊀㊀㊀双三相永磁同步电机绕组开路故障诊断方法王爽,㊀谢圣宝,㊀张秦一(上海大学机电工程与自动化学院,上海200444)摘㊀要:为了实现对双三相永磁同步电机绕组开路故障的快速诊断与定位,利用双三相永磁同步电机所特有的谐波子平面,提出采用谐波子平面电流矢量并结合归一化处理方案的双三相永磁同步电机绕组开路故障诊断策略㊂首先,根据故障前后谐波子平面电流矢量幅值大小的变化进行绕组开路故障的检测,其次,依据绕组开路故障后不同的电流矢量相角,准确定位出发生开路故障的绕组㊂为消除负载发生突变时可能造成的误诊断现象,进一步设计了针对谐波子平面电流矢量的归一化处理方案,提升对双三相永磁同步电机绕组开路故障诊断的鲁棒性㊂仿真和实验结果表明,所提策略能够快速地诊断并定位出绕组的开路故障,在负载发生突变时也可以表现出良好的可靠性和鲁棒性㊂关键词:双三相永磁同步电机;故障诊断策略;绕组开路故障;谐波子平面电流矢量;归一化处理DOI :10.15938/j.emc.2023.05.012中图分类号:TM35文献标志码:A文章编号:1007-449X(2023)05-0108-09㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-11-11基金项目:上海市自然科学基金(19ZR1418600)作者简介:王㊀爽(1977 ),男,博士,讲师,研究方向为智能控制理论及其在新能源汽车㊁电力电子和伺服控制系统中的应用;谢圣宝(1996 ),男,硕士研究生,研究方向为模块化多电平变换器;张秦一(1998 ),男,硕士研究生,研究方向为多相电机模型预测控制㊂通信作者:王㊀爽Winding open circuit fault diagnosis method for dual three-phase permanent magnet synchronous motorWANG Shuang,㊀XIE Shengbao,㊀ZHANG Qinyi(School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200444,China)Abstract :In order to achieve rapid diagnosis and localization of open circuit faults in winding of dual three-phase permanent magnet synchronous motor,based on the unique harmonic subspace of dual three-phase permanent magnet synchronous motor,with the harmonic subspace current vector and the normali-zation scheme combined,a winding open circuit fault diagnosis strategy of dual three-phase permanent magnet synchronous motor was proposed.Firstly,the winding open circuit fault was detected according to the change of harmonic subspace current vector amplitude before and after the fault.Secondly,the wind-ing with open circuit fault was accurately located according to different current vector phase angles after the winding open circuit fault.In order to eliminate the possible misdiagnosis caused by sudden load change,a normalization scheme for harmonic subspace current vector was further designed to improve the robustness of fault diagnosis.The simulation and experimental results show that the proposed harmonic subspace current vector method can quickly diagnose and locate the open circuit fault of winding,and can also show good reliability and robustness in case of sudden load change.Keywords :dual three-phase permanent magnet synchronous motor;fault diagnosis strategy;winding open circuit fault;harmonic subspace current vector;normalization processing scheme0㊀引㊀言双三相永磁同步电机(dual three-phase perma-nent magnet synchronous motor,DTPMSM)具有功率密度大㊁可靠性高和容错能力强等优点,被广泛应用于船舶电力推进㊁电动汽车㊁航空航天等对安全性和稳定性要求较高的领域[1]㊂DTPMSM驱动系统的故障来源中,电机绕组的开路故障是较为常见的电气故障[2]㊂故障发生时,如果不能及时准确地诊断处理,可能会对电机造成进一步的损害,甚至对整个系统造成严重的威胁[3]㊂因此,故障诊断策略已成为保证DTPMSM驱动系统安全稳定运行不可或缺的一部分㊂关于电机绕组开路故障的诊断方法一般可以分为三类:基于模型的诊断㊁基于信号的诊断和基于知识的诊断[4]㊂基于模型的诊断方法利用电机数学模型来估计绕组电压或电流变量,通过对比测量信号和估计信号实现对故障的诊断[4-5]㊂为提升负载变化时系统的鲁棒性,有文献提出基于闭环电流观测器及同步旋转坐标系电流观测器的开路故障诊断方法[6-7]㊂然而,基于模型诊断方案的性能过于依靠建模精度,对电机参数的变化非常敏感[8]㊂基于信号的诊断方法是通过提取故障信号的具体特征来实现的㊂根据测量变量的不同,可分为电压法和电流法㊂基于电压的诊断方法具有较快的诊断速度和较高的准确性[9]㊂文献[10-11]分别对负载相电压和线电压在故障前后的变换特征进行诊断㊂电压法需要在硬件电路中增加额外的传感器,这增加了系统的成本㊁复杂性和潜在的故障点㊂基于电流的检测方法通过提取和检测电机电流信号的故障特征对开路故障进行诊断,该方法与电机相电流的基波周期密切相关,其故障诊断时间通常比基于电压的方法长㊂文献[12]采用电流Park矢量法作为诊断工具用于检测逆变器和电机绕组的故障㊂文献[13]将电机相电流绝对平均值的误差作为诊断变量,用于检测单个和多个功率管的开路故障㊂文献[5]利用对称分量分析方法提取五相永磁同步磁阻电机的缺相故障特征,但在负载突变时会产生误诊断㊂文献[14]根据五相永磁同步电机解耦子平面上的电流模式和归一化相电流识别开路故障,但方法的识别过程过于复杂㊂基于知识的诊断方法独立于系统模型㊁负荷状况和信号模式,但需要大量的历史数据[15]㊂文献[16]通过小波变换提取故障特征,采用长短时间记忆算法对开路和短路故障进行检测㊂文献[17]将归一化的电流矢量作为诊断变量,运用模糊推理确定诊断结果㊂文献[18]通过离散时间小波变换提取相电流特征,使用支持向量机的方法对开路的功率管和绕组故障进行识别㊂基于知识的方法通过研究训练集的分布特征,充分利用样本中的信息进行故障诊断,不需要精确的系统模型㊂但该方法需要较长的训练时间,计算较为复杂,增加了实现的难度㊂综上可知,基于电流法的开路故障诊断策略与电机的参数无关,算法相对简单,且不需要增加额外的传感器,是目前较为常用的方法[19-21]㊂本文将在电流法的基础上,把包含故障特征的谐波平面电流矢量幅值和相角作为诊断因子,提出一种适用于DTPMSM的具有较好鲁棒性的绕组开路故障诊断策略㊂1㊀谐波子平面电流矢量与故障特征DTPMSM驱动系统如图1所示,其中ABC三相绕组由T1~T6功率管组成的三相逆变桥电路控制, XYZ三相绕组由T7~T12功率管组成的三相逆变桥电路控制,2套驱动电路共用直流母线㊂图1㊀DTPMSM驱动系统Fig.1㊀DTPMSM drive system DTPMSM在自然坐标系下的电压方程为u6s=R6s i6s+L6s d i6s d t+ψf dλ6s d t㊂(1)式中:u6s㊁i6s㊁R6s分别为定子相电压㊁定子电流㊁定子电阻矩阵;L6s㊁λ6s分别为电感系数㊁磁链系数矩阵;ψf为永磁体在每一相绕组中产生的磁链幅值; u6s=[u A u B u C u U u V u W]T;i6s=[i A i B i C i U i V i W]T; R6s=diag[R R R R R R];λ6s=[sinθe sin(θe-2π/3)sin(θe+2π/3)sin(θe-π/6)sin(θe-5π/6) sin(θe+π/2)]T,θe为转子纵轴与A相轴线的电角度㊂根据电压方程(1),选择电机电流为状态量,得901第5期王㊀爽等:双三相永磁同步电机绕组开路故障诊断方法到状态空间函数为d i 6s d t =-R L -16s i 6s +L -16s u 6s -ψf L -16s d λ6sd t㊂(2)按照标准状态空间函数形式,式(2)可写为x ㊃=Ax +Bu +d ,则在连续时间状态下x (t )的通解可表示为x (t )=e A (t -t 0)x (t 0)+ʏt t 0eA (t -τ)[Bu (τ)+d (τ)]d τ㊂(3)当DTPMSM 工作在正常状态下,忽略电机的高频噪声时,电机的六相绕组电流为完全平衡的正弦波,表达式为:i A =I m sin(ωt );i B =I m sin ωt -23π();i C=I msin ωt +23π();i X =I m sin ωt -16π();i Y =I m sin ωt -56π();i Z=I msin ωt +12π()㊂üþýïïïïïïïïïïïïïï(4)矢量空间解耦(vector space decomposition,VSD)将DTPMSM 中的变量映射到3个相互垂直的子平面:基波子平面α-β平面㊁谐波子平面z 1-z 2平面以及零序子平面o 1-o 2平面㊂根据VSD 坐标变换矩阵,此时谐波子平面电流i z 1和i z 2为i z 1i z 2éëêêùûúú=Tz 1z 2[][i A i B i C i X i Y i Z ]T =00[]㊂(5)式中[T z 1z 2]=131-12-12-323200-32321212-1éëêêêêùûúúúú㊂(6)理想状态下,DTPMSM 正常运行时谐波子平面的电流矢量为I z 1z 2=i z 1+j i z 2=0㊂(7)当DTPMSM 出现绕组开路故障时,不失一般性,以C 相绕组发生开路故障为例,此时C 相绕组电流为0,A 相绕组和B 相绕组串联接入电路㊂根据式(3),只考虑六相电流初始相位差,因而令A 相电流初始相位角为0,并忽略电流中的5次及以上高次谐波分量,可得:i A =α10.866I m sin(ωt )+β1I m sin(3ωt +0.1384π);i B =-α10.866I m sin(ωt )-β1I m sin(3ωt +0.1384π);i C =0;i X =α2I m sin(ωt -π3)+β2I m sin(3ωt -0.2211π);i Y =α3I m sin(ωt -π)+β3I m sin(3ωt -0.8668π);i Z =α4I m sin(ωt +π3)+β4I m sin(3ωt +0.3820π)㊂üþýïïïïïïïïïï(8)式中:ω为电机正常运行时的基波角频率;I m 为电机正常运行时的电流幅值;αi ㊁βi (i =1,2,3,4)分别为与电机参数有关的基波和三次谐波幅值系数㊂为便于分析故障状态下各相绕组电流的解析表达式,分析正常运行时的电流幅值与故障后电流基波㊁三次谐波幅值的关系,将表1的实验电机参数代入式(3),对故障下不同负载的绕组电流进行傅里叶变换,得到定子电流幅值分别为22.14㊁70.33和114.2A 时的系数如表2所示㊂可见三次谐波分量占比远小于基波分量,为此忽略三次谐波,简化式(8)为:i A =0.866I m sin(ωt );i B =-0.866I m sin(ωt );i C =0;i X =I m sin(ωt -π3);i Y =I m sin(ωt -π);i Z =I m sin(ωt +π3)㊂üþýïïïïïïïïïï(9)根据坐标变换矩阵,谐波子平面的电流为i z 1i z 2éëêêùûúú=[T z 1z 2][i A i B i C i X i Y i Z ]T =0.25I m sin(ωt +π2)-0.4330I m sin(ωt +π2)éëêêêêùûúúúú㊂(10)C 相绕组开路故障状态下谐波子平面的电流矢量为I z 1z 2=i z 1+j i z 2=(i 2z 1+i 2z 2)ej θ∗z 1z 2=|I z 1z 2|e j θ∗z 1z 2=0.5I m sin(ωt +π2)e -j π3㊂(11)式中:|I z 1z 2|为谐波子平面电流矢量I z 1z 2的幅值;θ∗z 1z 2=arctan(i z 2/i z 1)为理想情况下谐波子平面电流011电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀矢量I z1z2的相角㊂表1㊀实验电机参数Table1㊀Experimental motor parameters㊀㊀参数数值永磁磁链/Wb0.0056定子电阻/Ω0.0225交轴电感L q/mH0.05318直轴电感L d/mH0.05318漏自感L aal/mH0.002659额定转矩/(N㊃m)5额定电流/A60表2㊀不同负载下的电流幅值系数Table2㊀Current amplitude coefficient under different loads系数22.14A70.33A114.2Aα10.87500.86760.8571α20.97900.96500.9562α3 1.0108 1.00180.9895α4 1.0350 1.0430 1.0604β10.06390.09110.1310β20.07100.09650.1230β30.07380.10520.1512β40.07290.10170.1436同理,可以得到DTPMSM在其他相绕组开路状态下电流矢量I z1z2的幅值与相角,如表3所示㊂当电机出现绕组开路故障,谐波子平面电流发生变化,不再为0,电流矢量I z1z2的幅值和相角中包含故障信息㊂因此,DTPMSM的谐波子平面电流可以作为特征量,电流矢量I z1z2的幅值变化用于故障的诊断,确定是否发生了绕组开路故障,而相角用于定位发生开路故障的相绕组㊂表3㊀谐波子平面电流矢量I z1z2的幅值与相角Table3㊀Amplitude and phase angle of harmonic subspace current vector Iz1z2DTPMSM状态最大幅值相角正常运行状态00A相绕组开路0.5I m0B相绕组开路0.5I mπ/3C相绕组开路0.5I m-π/3X相绕组开路0.5I m-π/6Y相绕组开路0.5I mπ/6Z相绕组开路0.5I mπ/22㊀鲁棒性提升为了克服因负载突变造成的误诊断,提高方案的鲁棒性,提出采用归一化处理的改进措施㊂首先,对电流矢量I z1z2的幅值进行归一化处理:I z N=1,|I z1z2|ȡλ;0,|I z1z2|<λ㊂{(12)式中:I z N为谐波子平面电流矢量的归一化变量;λ为归一化阈值㊂将归一化变量I z N进行取平均值计算,得到故障诊断信号为F f=1TfʏT f0I z N d t=1NðN i=1I z N(i)㊂(13)式中:T f为积分周期,为保证开路故障诊断的准确性,一般T f最大取电机在额定转速下电流周期的1/4;N为1个周期内的采样点数,N随着电流采样频率的升高而增大㊂然后,将计算得到的故障诊断信号F f代入下式的归一化电流故障检测准则进行故障判断,即F n=Open,F f>k;Normal,F fɤk㊂{(14)式中:F n为归一化电流故障检测准则信号;k为归一化电流故障检测判断阈值㊂若F fɤk,则F n=Nor-mal,表示没有出现绕组开路故障;若F f>k,则F n= Open,表示出现绕组开路故障㊂最后,利用电流矢量I z1z2的相角对发生开路故障的绕组进行定位㊂为了克服电机在实际运行过程中受到非理想因素的影响,需要对理想情况下得到的θ∗z1z2设置一定的裕度角φ㊂当实际电流矢量I z1z2的相角满足下式时,可定位开路故障的绕组,即(θ∗z1z2-φ)ɤδɤ(θ∗z1z2+φ)㊂(15)图2为本文提出的绕组故障诊断策略原理图㊂图2㊀所提出的绕组开路故障诊断策略Fig.2㊀Proposed winding open circuit fault diagnosis strategy111第5期王㊀爽等:双三相永磁同步电机绕组开路故障诊断方法3㊀仿真结果为了验证本文所提方法的鲁棒性,未采用归一化处理和采用归一化处理的谐波子平面电流矢量法在DTPMSM 负载突变时的仿真结果对比如图3所示㊂仿真中DTPMSM 参数如表1所示,电机的转速参考值设定为300r /min,归一化阈值λ及故障检测判断阈值k 均设置为0.2,T f 设置为0.02s㊂t =0.1s 时负载由3N㊃m 突减到空载,t =0.2s 时由空载突增至3N㊃m㊂为了让波形更加清晰可见,只绘出了一套绕组的电流波形㊂图3㊀负载突变时归一化处理前后仿真结果Fig.3㊀Simulation results before and after normaliza-tion in case of sudden load change图3的仿真结果表明,在突增突变的情况下,电流矢量I z 1z 2的幅值会有较大的波动,不采用归一化处理的情况下容易产生误诊断,而归一化处理后的方法F f 未超过诊断阈值k ,负载突变不会产生误诊断㊂图4为各相绕组开路状态下标准化基波子平面电流矢量I αβ和谐波子平面电流矢量I z 1z 2的仿真结果㊂转速为300r /min,负载转矩为1.5N㊃m㊂当绕组开路时,基波子平面电流矢量形成不同倾斜角度的椭圆,谐波子平面电流矢量形成不同倾斜角度的直线,倾斜角度与表3一致㊂图4㊀绕组开路时基波与谐波子平面电流矢量Fig.4㊀Current vector of fundamental and harmonicsubspace when winding is open-circuit图5给出了发生开路故障的绕组电流波形和故障诊断信号波形㊂M 为开路故障绕组编号,电机A㊁B㊁C㊁X㊁Y㊁Z 绕组开路时分别对应数字1~6,非故障状态下运行时M =0㊂以图5(a)为例:t <0.1s,电机处于正常运行状态,故障诊断信号F f =0,故障绕组编号M =0,表示电机未发生绕组开路故障㊂t =0.1s 时出现开路故障,电流矢量I z 1z 2的幅值变化逐渐超过归一化阈值λ,故障诊断信号F f 的值上升并最终稳定在接近于1㊂当F f 超过阈值k 时,触发故障诊断算法进入故障定位模块㊂故障绕组编号M 由0跳变为1,显示A 相绕组出现开路故障㊂4㊀实验验证实验平台如图6所示,采用伺服电机系统作为负载㊂实验电机参数同表1㊂图7(a)和图7(b)分别为正常运行状态下的诊断变量及标准化电流矢量的实验结果㊂实验中,电机转速为300r /min,负载转矩为1.5N㊃m㊂由于211电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀噪声存在,谐波子平面电流矢量I z1z2的幅值约为0.1A㊂因此,试验中将归一化阈值设置为λ=0.2,归一化电流故障检测判断阈值设置为k=0.2㊂图5㊀绕组电流与故障诊断信号Fig.5㊀Winding current and fault diagnosis signal 311第5期王㊀爽等:双三相永磁同步电机绕组开路故障诊断方法图6㊀实验平台Fig.6㊀Experimentalplatform图7㊀正常运行时的实验结果Fig.7㊀Experimental results of normal operation归一化处理前后的实验结果对比如图8所示㊂电机负载先从3N㊃m 突减到空载,再由空载突加到3N㊃m,电机的转速为300r /min㊂负载突变的瞬态工况下,未采用归一化处理的谐波子空间电流矢量法中F =1表示电流矢量I z 1z 2的幅值超过预先设置的阈值,从而判断系统出现绕组开路故障,而归一化处理之后的故障诊断信号F f 的值保持在0左右,能够有效地避免由于负载突变而出现的误诊断现象㊂图9和图10分别为相绕组发生开路故障时的标准化电流矢量㊁诊断变量和电流波形㊂绕组开路时,基波子平面电流的矢量形成不同倾斜角度的近似椭圆,谐波子平面电流矢量形成不同倾斜角度的直线,与仿真结论相符㊂当某一相绕组开路时,该相电流迅速变为0,该套绕组其他相的电流波形发生明显的畸变,当F f 超过阈值k 时,故障绕组编号M 由0发生跳变,定位出开路故障的绕组㊂图8㊀负载突变时归一化处理前后的实验结果Fig.8㊀Experimental results before and after normali-zation in case of sudden loadchange图9㊀绕组开路故障时的电流矢量Fig.9㊀Current vector when winding is open circuit411电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图10㊀绕组开路故障时的电流及诊断变量Fig.10㊀Current and diagnostic variables when winding is open circuit5㊀结㊀论针对DTPMSM相绕组开路故障问题,本文提出一种基于谐波子平面电流矢量的诊断策略㊂该策略根据谐波子平面电流矢量的幅值与相角进行绕组开路故障的判断与故障相定位㊂为进一步提升负载变化时该诊断方法的鲁棒性,本文采用电流归一化方法对所提方案进行改进㊂仿真与实验结果表明,该方法能够快速并准确地诊断并定位出绕组的开路故障,验证了所提方案的可行性和有效性㊂参考文献:[1]㊀BARRERO F,DURAN M J.Recent advances in the design,mod-eling,and control of multiphase machines-Part I[J].IEEE Trans-actions on Industrial Electronics,2016,63(1):449. [2]㊀KESTELYN X,SEMAIL E.A vectorial approach for generation ofoptimal current references for multiphase permanent-magnet syn-chronous machines in real time[J].IEEE Transactions on Indus-trial Electronics,2011,58(11):5057.[3]㊀LU B,SHARMA S K.A literature review of IGBT fault diagnosticand protection methods for power inverters[J].IEEE Transactions on Industry Applications,2009,45(5):1770.[4]㊀JUNG S M,PARK J S,KIM H W,et al.An MRAS-based diag-nosis of open-circuit fault in PWM voltage-source inverters for PM synchronous motor drive systems[J].IEEE Transactions on PowerElectronics,2013,28(5):2514.[5]㊀ARAFAT A,CHOI S,BAEK J.Open-phase fault detection of afive-phase permanent magnet assisted synchronous reluctance motor based on symmetrical components theory[J].IEEE Transactions on Industrial Electronics,2017,64(8):6465.[6]㊀WASSINGER N,PENOVI E,RETEGUI R G,et al.Open-circuitfault identification method for interleaved converters based on time-domain analysis of the state observer residual[J].IEEE Transac-tions on Power Electronics,2019,34(4):3740.[7]㊀YONG C,ZHANG J J,CHEN Z Y.Current observer-based onlineopen-switch fault diagnosis for voltage-source inverter[J].ISA Transactions,2020,99:445.[8]㊀GMATI B,JLASSI I,EL KHIL S K,et al.Open-switch fault di-agnosis in voltage source inverters of PMSM drives using predictive current errors and fuzzy logic approach[J].IET Power Electron-ics,2021,14(6):1059.[9]㊀CHEN Y,PEI X J,NIE S S,et al.Monitoring and diagnosis forthe DC-DC converter using the magnetic near field waveform[J].IEEE Transactions on Industrial Electronics,2011,58(5):1634.[10]㊀ALAVI M,WANG D,LUO M.Short-circuit fault diagnosis forthree-phase inverters based on voltage-space patterns[J].IEEETransactions on Industrial Electronics,2014,61(10):5558.[11]㊀CHENG Shu,CHEN Yating,YU Tianjian,et al.A novel diag-nostic technique for open-circuited faults of inverters based onoutput line-to-line voltage model[J].IEEE Transactions on In-dustrial Electronics,2016,63(7):4412.[12]㊀MENDES A M S,MARQUES CARDOSO A J.Voltage source in-511第5期王㊀爽等:双三相永磁同步电机绕组开路故障诊断方法verter fault diagnosis in variable speed AC drives,by the averagecurrent Park's vector approach[C]//IEEE International ElectricMachines and Drives Conference,May9-12,1999,Seattle,WA,USA.1999:704-706.[13]㊀ESTIMA J O,CARDOSO A J M.A new approach for real-timemultiple open-circuit fault diagnosis in voltage-source inverters[J].IEEE Transactions on Industry Applications,2011,47(6):2487.[14]㊀SAAVEDRA H,RIBA J,ROMERAL L.Detection of inter-turnfaults in five-phase permanent magnet synchronous motors[J].Advances in Electrical and Computer Engineering,2014,14(4):49.[15]㊀GAO Z W,CECATI C,DING S X.A survey of fault diagnosisand fault-tolerant techniques-Part I:fault diagnosis with model-based and signal-based approaches[J].IEEE Transactions onIndustrial Electronics,2015,62(6):3757.[16]㊀EBRAHIMI B,FAIZ J,LOTFIFARD S,et al.Novel indices forbroken rotor bars fault diagnosis in induction motors using wavelettransform[J].Mechanical Systems and Signal Processing,2012,30:131.[17]㊀CHEN W,BAZZI A.Logic-based methods for intelligent faultdiagnosis and recovery in power electronics[J].IEEE Transac-tions on Power Electronics,2017,32(9):5573.[18]㊀WU F,HAO Y,ZHAO J,et al.Current similarity based open-cir-cuit fault diagnosis for induction motor drives with discrete wave-let transform[J].Microelectronics Reliability,2017,75:309.[19]㊀JIANG X,HUANG W,CAO R,et al.Electric drive system ofdual-winding fault-tolerant permanent-magnet motor for aerospaceapplications[J].IEEE Transactions on Industrial Electronics,2015,62(12):7322.[20]㊀苟小军,张玮,李永刚,等.抽水蓄能发电机励磁绕组匝间短路的环流特性分析[J].大电机技术,2023(4):28.GOU Xiaojun,ZHANG Wei,LI Yonggang,et al.Analysis ofcirculating current characteristics of inter-turn short circuits in theexcitation winding of a pumped storage generator[J].Large Elec-tric Machine and Hydraulic Turbine,2023(4):28. [21]㊀姜付杰,孙玉玺,张旭东,等.基于相电流算法的磁浮直线同步电机电流传感器故障诊断[J].大电机技术,2022(6):21.JIANG Fujie,SUN Yuxi,ZHANG Xudong,et al.Fault diagno-sis strategy of current sensor of maglev linear synchronous motorbased on phase current algorithm[J].Large Electric Machineand Hydraulic Turbine,2022(6):21.(编辑:邱赫男)611电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀。
3/3相双绕组感应发电机励磁控制系统
1 系统简介
3/3 相双绕组感应发电机带有两个绕组:励磁补偿绕组和功率绕组,如图1 所示。
励磁补偿绕组上接一个电力电子变换装置,用来提供感应发电机需要的无功功率,使功率绕组上输出一个稳定的直流电压。
图1 中各参数的含义如下:
isa, isb, isc——补偿绕组中的励磁电流;
usa, usb, usc——补偿绕组相电压;
ipa, ipb, ipc——功率绕组电流;
upa, upb, upc——功率绕组相电压;
udc——二极管整流桥直流侧输出电压;
uc——变流器直流侧电容电压。
电力电子变换装置由功率器件及其驱动电路和控制电路两部分组成。
功率器件选用三菱公司的智能功率模块(IPM)PM75CSA120(75A/1200V),驱动电路使用光耦HCPL4502。
控制电路由DSP+FPGA 构成。
2 EPM7128 与TMS320C32 同外设之间的接口电路
图2 所示为控制电路的接口电路。
控制电路使用的DSP 是TMS320C32, 它是TI 公司生产的第三代高性能的CMOS 32 位数字信号处理器,其凭借强大的指令系统、高速数据处理能力及创新的结构,已经成为理想的工业控制用DSP
器件。
其主要特点是:单周期指令执行时间为50ns,具有每秒可执行2200 万条指令、进行4000 万次浮点运算的能力;提供了一个增强的外部存储器配置接口,具备更加灵活的存储器管理与数据处理方式。
控制电路使用的FPGA 器件为。
双绕组变极三速电动机电枢绕组选择方案的分析摘要详细分析双绕组变极三速电动机内部环流形成的原因,结合维修电动机,提出变极电动机并联支路内极相组间连接次序、分数槽绕组大小极相组轮换顺序、绕组连接方式及节距选择的正确组合方案。
关键词双绕组电动机环流极相组连接方式1 概述双绕组变极三速电动机的绕组较为特殊,在掉失原始绕组分布而又无资料可查时,部分维修人员对确定其绕组选择方案感到为难,导致电动机不能及时恢复工作。
某锰矿厂1台YD180L-8/6/4极三速电动机(以下称维修电机),经多次修理仍出现噪声、振动、温升较大的异常现象,后经我们对其绕组分布方案的重新选择及维修,才使电机正常运行。
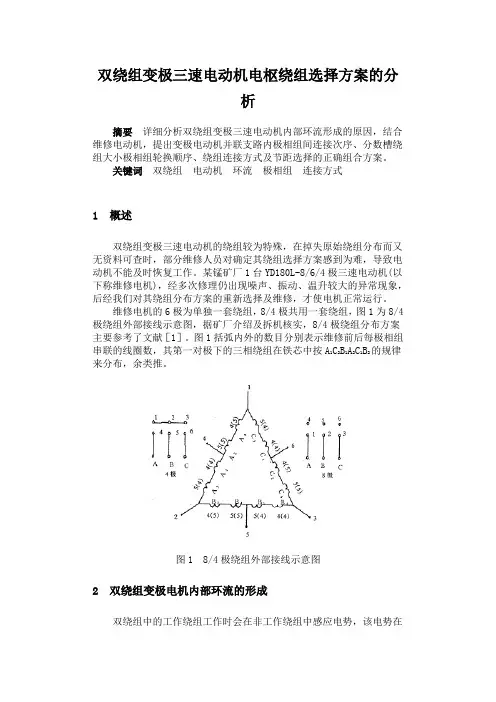
维修电机的6极为单独一套绕组,8/4极共用一套绕组,图1为8/4极绕组外部接线示意图,据矿厂介绍及拆机核实,8/4极绕组分布方案主要参考了文献[1]。
图1括弧内外的数目分别表示维修前后每极相组串联的线圈数,其第一对极下的三相绕组在铁芯中按A1C2B1A2C1B2的规律来分布,余类推。
图1 8/4极绕组外部接线示意图2 双绕组变极电机内部环流的形成双绕组中的工作绕组工作时会在非工作绕组中感应电势,该电势在非工作绕组中是否形成电势与其绕组选择方案有关。
2.1 非工作绕组并联支路环流的形成并联支路合成电势等于支路各极相组电势的矢量和,并联闭合回路是否存在电势决定于该矢量和的值,也决定了回路环流的形成。
对支路数a=1,无论三相绕相是Y或Δ连接,非工作绕组均无环流。
当a>1时,支路合成电势的矢量和与所串极相组间的相位差有关,其分析如下。
2.1.1 非工作绕组单独工作时极相组间的相位差设工作绕组为P1对极,非工作绕组为P2对极,正规60°相带每个极相组的相位为60°(指电角,下同),非工作绕组每相有2P2个极相组。
由于同极性的极相组相位彼此相差360°,正负极相组在空间相差180°,只是负极相组需反接线,它与正极相组的相位差(180°-180°)为0°,即4极绕组单独工作时,4个极相组同相位,同理,2P2极绕组单独工作时,2P2个极相组也同相位。
2012年12月第26卷第6期装甲兵工程学院学报Journal of Academy of Armored Force EngineeringDec.2012Vol.26No.6文章编号:1672-1497(2012)06-0056-04三相绕组切换电路分析与设计罗宏浩1,王福兴1,姜红军2(1.装甲兵工程学院控制工程系,北京100072;2.65196部队,辽宁沈阳110000)摘要:针对在装甲车辆中体积、功率受限条件下,永磁电动机提升低速转矩与拓宽弱磁工作范围难以兼顾的问题,提出了采用电动机绕组换接的方法。
提出了一种切换电路的设计方案,采用电路仿真软件Multisim 分析了切换电路的动态工作过程。
在此基础上,构建了一套适用于三相绕组切换的零电流切换控制系统,可通过上位机观测电路中的电流波形,并实现对绕组的串、并联结构进行切换控制。
试验结果表明:该电路可快速实现绕组的串/并联切换,而且基本上不会产生电压冲击。
关键词:电传动;永磁电动机;绕组换接;电路设计中图分类号:TM302文献标志码:AAnalysis and Design of Thiphase Winding Switching CircuitLUO Hong-hao 1,WANG Fu-xing 1,JIANG Hong-jun 2(1.Department of Control Engineering ,Academy of Armored Force Engineering ,Beijing 100072,China ;2.Troop No.65196of PLA ,Shenyang 110000,China )Abstract :Under the circumstances that volume and power are limited in armored vehicles ,raising low speed large torque and widening flux-weakening range become conflict inevitably in permanent magnet motors.The motor winding switching method is adopted to resolve this problem.A switching circuit de-sign is proposed and the dynamic process of switching circuit is analyzed with Multisim software.What ’s more ,a switching control system is constructed based on zero current switching to fulfill triphase winding switching and observe the current waveforms.The experimental results show that the switching between serial and parallel connection in the circuit is very rapid and the voltage impulsion is eliminated during the switching process.Key words :electric drive ;permanent magnet motor ;winding switching ;circuit design 收稿日期:2012-07-10作者简介:罗宏浩(1975-),男,讲师,博士。
双绕组发电机原理发电机是一种将机械能转化为电能的装置,它在现代社会中扮演着不可或缺的角色。
而双绕组发电机则是一种常见的发电机类型,它的原理相对简单,但却具有重要的应用价值。
双绕组发电机由两个绕组组成,分别称为励磁绕组和感应绕组。
励磁绕组是一个直流电源,通过它产生的磁场来激励感应绕组。
感应绕组则是由导线组成的线圈,当磁场通过感应绕组时,导线中就会产生感应电流。
在双绕组发电机中,励磁绕组和感应绕组之间存在着一定的相对运动。
通常情况下,励磁绕组固定不动,而感应绕组则与转子一起旋转。
当转子旋转时,磁场也随之改变,导致感应绕组中的感应电流发生变化。
根据法拉第电磁感应定律,当感应电流在导线中流动时,就会产生一个与电流方向垂直的磁场。
这个磁场与励磁绕组的磁场相互作用,产生力矩,将转子驱动转动。
由于感应绕组中的感应电流是交流的,因此在转子旋转的过程中,感应电流的方向也会反向变化。
这就导致了一个周期性的磁场变化,从而产生了交流电。
双绕组发电机通过励磁绕组产生的磁场激励感应绕组产生感应电流,再通过感应电流产生的磁场来驱动转子旋转,最终输出交流电。
这种原理使得双绕组发电机成为了一种常见的发电装置。
双绕组发电机的应用十分广泛。
它可以用于发电厂、汽车发电机、风力发电机等领域。
通过调整励磁绕组的电流大小和方向,可以控制感应电流的大小和频率,从而实现不同功率和频率的电力输出。
双绕组发电机是一种将机械能转化为电能的重要装置。
它通过励磁绕组和感应绕组之间的相互作用,产生了交流电。
这种原理简单而有效,使得双绕组发电机在现代社会中得到了广泛应用。
无论是发电厂还是家用发电设备,双绕组发电机都发挥着重要的作用,为人们的生活和工作提供了可靠的电力支持。