固定翼飞机飞行原理简介甲固定翼飞机之基本空气动力学空气
- 格式:doc
- 大小:903.00 KB
- 文档页数:11
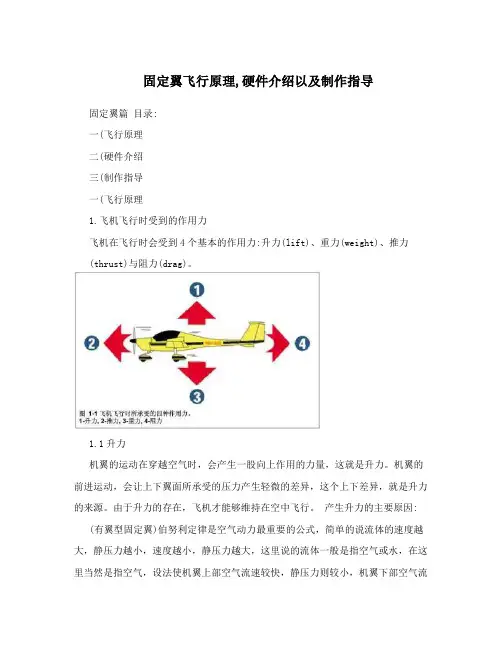
固定翼飞行原理,硬件介绍以及制作指导固定翼篇目录:一(飞行原理二(硬件介绍三(制作指导一(飞行原理1.飞机飞行时受到的作用力飞机在飞行时会受到4个基本的作用力:升力(lift)、重力(weight)、推力(thrust)与阻力(drag)。
1.1升力机翼的运动在穿越空气时,会产生一股向上作用的力量,这就是升力。
机翼的前进运动,会让上下翼面所承受的压力产生轻微的差异,这个上下差异,就是升力的来源。
由于升力的存在,飞机才能够维持在空中飞行。
产生升力的主要原因: (有翼型固定翼)伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,这里说的流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘。
(平板固定翼)攻角(迎角): 当飞机的机翼为对称形状,气流沿着机翼对称轴流动时,由于机翼两个表面的形状一样,因而气流速度一样,所产生的压力也一样,此时机翼不产生升力。
但是当对称机翼以一定的倾斜角(称为攻角或迎角)在空气中运动时,就会出现与非对称机翼类似的流动现象,使得上下表面的压力不一致,从而也会产生升力。
1.2重力重力是向下的作用力。
由于飞行员可以决定飞机的载重大小,所以某种程度上,你可以说这是人为可以控制的力量。
除了燃料随着旅程慢慢消耗之外,飞机的实际重量在航程中不大容易变动。
在等速飞行中(飞机的速度与方向保持一定不变),升力与重力维持着某种平衡。
1.3推力和阻力引擎驱动螺旋桨后,所产生的前进力量就是推力。
⼒。
外壳摩擦⼒是最难降低的寄⽣阻⼒类型。
没有完全光滑的表⾯。
甚⾄是机械加⼯的表⾯,通过放⼤来检测的话,仍然可以看到粗糙的不平坦的外观。
这种粗糙的表⾯会使表⾯的空⽓流线型弯曲,对平滑⽓流产⽣阻⼒。
通过使⽤光滑的磨平的表⾯,和去掉突出的铆钉头,粗糙和其他的不规则物来最⼩化外壳摩擦⼒。
设计飞机时必须要增加另⼀个对寄⽣阻⼒的考虑。
这个阻⼒复合了形阻⼒效应和外壳摩擦,称为所谓的⼲涉阻⼒。
如果两个物体靠近放置,产⽣的合成紊乱会⽐单个测试时⼤50%到200%。
形阻⼒,外壳摩擦⼒和⼲涉阻⼒这三个阻⼒都要被计算以确定⼀个飞机的寄⽣阻⼒。
寄⽣阻⼒中⼀个物体的外形是⼀个很⼤的因素。
然⽽,说道寄⽣阻⼒时指⽰空速也是⼀个同样重要的因素。
⼀个物体的外形阻⼒保持在⼀个相对⽓流固定的位置,⼤约以速度的平⽅成正⽐增加;这样,空速增加为原来的两倍,那么阻⼒就会变成原来的四倍,空速增加为三倍的话阻⼒也就增加为九倍。
但是,这个关系只在相当的低⾳速时维持很好。
在某些更⾼速度,外形阻⼒的增加会随速度⽽变的突然很快。
第⼆个基本的阻⼒类型是诱导阻⼒。
以机械运动⽅式⼯作的系统没有⼀个可以达到100%的效率,这是⼀个确定的物理事实。
这就意味着⽆论什么特性的系统,总是以系统中消耗某些额外的功来获得需要的功。
系统越⾼效,损失就越⼩。
在平飞过程中,机翼的空⽓动⼒学特性产⽣要求的升⼒,但是这只能通过某种代价才能获得。
这种代价的名字就叫诱导阻⼒。
诱导阻⼒是内在的,在机翼产⽣升⼒的任何时刻,⽽事实上,这种阻⼒是升⼒的产物中不可分离的。
继⽽,只要有升⼒就会有这种⼒。
机翼通过利⽤三种⽓流的能量产⽣升⼒。
⽆论什么时候机翼产⽣升⼒,机翼下表⾯的压⼒总是⼤于机翼上表⾯的压⼒。
结果,机翼下⽅的⾼压区空⽓有向机翼上⽅的低压去流动的趋势。
在机翼的翼尖附近,这些压⼒有区域相等的趋势,产⽣⼀个从下表⾯到机翼上表⾯的向外的侧⾯⽓流。
这个侧向⽓流给予翼尖的空⽓和机翼后⾯的尾流⼀个旋转速度。
飞机起飞原理与空气动力学飞机的起飞是整个飞行过程的开始,它必须克服地面摩擦力和重力,通过产生足够的升力来使机身离开地面并进入空中。
这个过程涉及到许多复杂的物理原理和空气动力学的知识。
本文将重点介绍飞机起飞的基本原理以及与之相关的空气动力学知识。
首先,我们需要了解一些基本的概念。
升力是支撑飞机上升的力,它由机翼产生。
升力的大小取决于机翼的几何形状、机翼与空气的相对运动速度以及气动力学特性。
重力是向下的力,它由飞机的质量决定。
为了起飞,升力必须大于等于重力。
飞机起飞的过程可以分为三个主要阶段:加速滑行、离地和攀升。
在加速滑行阶段,飞机使用发动机产生推力,推动飞机前进。
同时,机翼产生的升力也逐渐增加。
为了在起飞过程中保持稳定,飞机的重心必须在起飞姿态下的前方。
在这个阶段,飞机必须克服地面摩擦力和空气阻力,使飞机加快速度以达到起飞所需的最小速度。
离地是飞机起飞过程中的关键步骤。
当飞机的速度达到足够的大小时,空气动力学效应开始起作用。
飞机机翼上的升力产生的垂直向上的力超过了重力,使飞机离开地面。
为了实现离地,飞机必须在合适的位置和速度上升。
一旦飞机离开地面,它会进入到攀升阶段。
在这个阶段,飞机继续增加高度并保持前进。
升力继续克服重力,使飞机能够在空中保持平衡和稳定飞行。
那么,飞机起飞的原理是什么呢?根据伯努利定律,当气流经过机翼时,在机翼上方的气流速度较快,而在下方较慢。
这导致了压强的不平衡,从而产生升力。
机翼的形状和横截面也起到重要作用。
机翼通常呈上下凸起的形状,称为翼型。
翼型的特殊曲率可以帮助加速上方气流的流速,从而增加升力。
此外,机翼后缘的襟翼和副翼等辅助装置也可以调整升力分布,增加起飞性能。
此外,推力也对飞机起飞至关重要。
推力是由发动机产生的向前推动的力,它必须大于飞机的重力和空气阻力,才能确保飞机的加速和离地。
发动机的推力取决于喷气速度和喷气量。
喷气速度取决于发动机喷气口的尺寸和燃烧效率。
喷气量则取决于燃料燃烧速率和发动机的设计。
【固定翼无人机】固定翼的飞行教程及原理1. 引言固定翼无人机是一种飞行器,通过固定在机身上的机翼产生升力来进行飞行。
与多旋翼无人机相比,固定翼无人机具有较长的续航时间和较大的飞行速度。
在本文档中,我们将介绍固定翼无人机的飞行教程及其背后的原理。
2. 固定翼无人机的组成部分固定翼无人机由多个组成部分构成,包括机翼、机身、尾翼、电机、螺旋桨、控制面以及飞行控制系统等。
其中,机翼是固定翼无人机最重要的部分,它产生升力让飞行器能够飞起来。
控制面则用来进行飞行姿态的控制,使得固定翼无人机能够稳定地飞行。
3. 固定翼无人机的飞行原理固定翼无人机的飞行原理基于空气动力学的理论。
当飞行器在空中运动时,机翼上的气流通过机翼的形状和角度变化,使得上表面的气流速度更快,下表面的气流速度更慢,从而产生升力。
升力的大小取决于机翼的面积、空气流速和机翼的攻角等因素。
除了升力,固定翼无人机还需要考虑阻力、重力和推力等因素。
阻力是空气对飞行器运动的阻碍力,它与飞行速度和飞行器外形等因素有关。
重力是地球对飞行器的吸引力,它通过重力作用在飞行器的质量中产生向下的力。
而推力则是由电机和螺旋桨产生的向前的力,使得飞行器能够向前运动。
综合考虑这些因素,固定翼无人机的飞行姿态可以通过调整控制面的角度来实现。
例如,如果需要上升,可以增加上升角度以增加升力,从而克服重力。
如果需要转向,可以调整方向舵的角度,改变机翼的升力分布,从而产生横向的力矩来改变飞行方向。
4. 固定翼无人机的起飞与降落固定翼无人机的起飞与降落是飞行过程中最关键的阶段。
在起飞过程中,需要通过增加螺旋桨的推力和控制面的角度来产生足够的升力。
当飞机达到足够的速度和升力后,就可以离地起飞。
降落过程中,飞行员需要选择一个合适的着陆点,并调整下降角度和进近速度。
在接近地面时,要逐渐减小推力和调整控制面角度,以减小飞机的速度并使其平稳地着陆。
5. 固定翼无人机的飞行姿态控制固定翼无人机的飞行姿态控制是通过改变控制面的角度来实现的。
固定翼飞机飞行原理简介飞行原理简介一要了解飞机的飞行原理就必须先知道飞机的组成以及功用飞机的升力是如何产生的等问题。
这些问题将分成几个部分简要讲解。
一、飞行的主要组成部分及功用到目前为止除了少数特殊形式的飞机外大多数飞机都由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成 1. 机翼——机翼的主要功用是产生升力以支持飞机在空中飞行同时也起到一定的稳定和操作作用。
在机翼上一般安装有副翼和襟翼操纵副翼可使飞机滚转放下襟翼可使升力增大。
机翼上还可安装发动机、起落架和油箱等。
不同用途的飞机其机翼形状、大小也各有不同。
2. 机身——机身的主要功用是装载乘员、旅客、武器、货物和各种设备将飞机的其他部件如机翼、尾翼及发动机等连接成一个整体。
3. 尾翼——尾翼包括水平尾翼和垂直尾翼。
水平尾翼由固定的水平安定面和可动的升降舵组成有的高速飞机将水平安定面和升降舵合为一体成为全动平尾。
垂直尾翼包括固定的垂直安定面和可动的方向舵。
尾翼的作用是操纵飞机俯仰和偏转保证飞机能平稳飞行。
4.起落装置——飞机的起落架大都由减震支柱和机轮组成作用是起飞、着陆滑跑地面滑行和停放时支撑飞机。
5.动力装置——动力装置主要用来产生拉力和推力使飞机前进。
飞机上除了这五个主要部分外根据飞机操作和执行任务的需要还装有各种仪表、通讯设备、领航设备、安全设备等其他设备。
二、飞机的升力和阻力飞机是重于空气的飞行器当飞机飞行在空中就会产生作用于飞机的空气动力飞机就是靠空气动力升空飞行的。
在了解飞机升力和阻力的产生之前我们还要认识空气流动的特性即空气流动的基本规律。
流动的空气就是气流一种流体这里我们要引用两个流体定理连续性定理和伯努利定理流体的连续性定理当流体连续不断而稳定地流过一个粗细不等的管道时由于管道中任何一部分的流体都不能中断或挤压起来因此在同一时间内流进任一切面的流体的质量和从另一切面流出的流体质量是相等的。
连续性定理阐述了流体在流动中流速和管道切面之间的关系。
固定翼飞机飞行原理知识1.升力固定翼飞机产生升力的机制是通过机翼上的气动力来实现的。
当飞机在飞行时,机翼上的气流会受到曲面的影响,产生上、下表面的气压差。
根据伯努利原理,流速越大的地方气压越低,而流速越小的地方气压越高。
因此,机翼上表面的气压较低,下表面的气压较高,产生的气压差会使机翼产生向上的升力。
2.推力3.阻力阻力是固定翼飞机飞行中需要克服的力量,它是由空气对飞机运动的阻碍产生的。
阻力主要包括以下几个方面:气动阻力、重量阻力和滚动阻力。
-气动阻力:由于飞机在飞行过程中与空气摩擦而产生的阻力。
气动阻力与飞机的速度、机翼的形状和横截面积、空气密度等有关。
通常情况下,飞机的气动阻力随着速度的增加而增加。
-重量阻力:是由于飞机自身质量产生的阻力。
重量阻力可以通过升力产生的垂直向上的力来抵消。
-滚动阻力:由于飞机与地面之间的摩擦而产生的阻力。
滚动阻力主要取决于飞机的重量、地面状况和速度。
4.控制固定翼飞机的控制主要通过机翼和尾翼来实现。
通过改变机翼的迎角,可以调节升力的大小。
水平尾翼和垂直尾翼的倾斜角度可以用来控制飞机的俯仰和偏航运动。
飞机在飞行过程中,飞行员通过改变这些控制面的运动状态来实现飞机的操纵。
此外,固定翼飞机还存在一种重要的特性,即稳定性和机动性。
-稳定性:固定翼飞机的稳定性是指在受到外部扰动或飞行条件变化时,能够恢复到稳定飞行状态的能力。
稳定性分为纵向稳定性、横向稳定性和方向稳定性。
-机动性:固定翼飞机的机动性是指飞机改变飞行状态的能力,包括上升、下降、俯仰、滚转和偏航等。
机动性取决于飞机的结构设计、动力性能和操纵系统的灵活性。
总结起来,固定翼飞机的飞行原理主要涉及升力、推力、阻力和控制等方面。
通过合理的设计和控制,固定翼飞机可以在空中保持稳定飞行,并实现各种机动动作。
固定翼飞机的飞行原理为人类的航空事业做出了重要贡献。
固定翼飞机飞行原理固定翼飞机是一种能够在大气层中飞行的航空器,其飞行原理主要基于空气动力学和牛顿力学的基本原理。
在这篇文档中,我们将深入探讨固定翼飞机的飞行原理,包括升力、推进力、阻力和重力等重要概念。
首先,我们来讨论固定翼飞机的升力原理。
当飞机在飞行时,飞机的机翼会受到空气的作用力,产生一个向上的升力。
这是因为机翼的上表面比下表面要凸起,当空气流经机翼时,上表面的气流要比下表面的气流要快,根据伯努利定律,气流速度越快的地方气压就越小,所以机翼上表面的气压就比下表面的气压小,这样就形成了一个向上的升力。
而这个升力正好可以克服飞机的重力,使得飞机能够在空中飞行。
其次,我们要了解固定翼飞机的推进力原理。
固定翼飞机的推进力主要来自于发动机产生的动力,通过推进器将动力转化为推进力,从而推动飞机向前飞行。
推进力的大小和方向会影响飞机的速度和飞行方向,是飞机飞行中必不可少的力量。
同时,阻力也是固定翼飞机飞行中需要克服的重要力量。
阻力来自于空气对飞机运动的阻碍,它会使飞机的速度减小,需要消耗额外的动力来克服。
因此,设计飞机外形和减小阻力是飞机设计中需要考虑的重要因素之一。
最后,我们要提到的是重力。
重力是地球对飞机的吸引力,是飞机在空中飞行时需要克服的力量。
飞机需要产生足够的升力来克服重力,才能保持在空中飞行。
总的来说,固定翼飞机的飞行原理涉及到升力、推进力、阻力和重力等多个重要概念。
通过合理的设计和控制,飞机能够在大气层中实现稳定、高效的飞行。
对于飞行员和飞行工程师来说,深入理解固定翼飞机的飞行原理是非常重要的,这不仅有助于提高飞行安全性,还可以为飞机设计和改进提供重要的理论基础。
希望本文对您有所帮助,谢谢阅读!。

固定翼飞机基础知识固定翼飞机是指靠机翼产生升力进行飞行的飞机,它是航空工程中的主要研究对象之一。
固定翼飞机的设计、制造、试飞和运行需要很多知识和经验,下面将介绍一些基础知识。
1.飞行原理固定翼飞机能够飞行的原理是利用机翼产生的升力来克服重力和空气阻力。
当飞机在空气中以一定速度飞行时,机翼上方的气流速度较快,下方的气流速度较慢,由于差速产生升力,使飞机保持在空中。
2.构造固定翼飞机主要由机翼、机身、机尾和动力装置组成。
机翼是飞机的主要承载部件,包括前缘、后缘、上表面、下表面、翼展和翼面积等;机身是飞机的主要载人载货部分,包括座舱、货舱、机舱、机尾和前部舱门等;机尾包括水平尾翼、垂直尾翼和方向舵,用于控制飞机的平衡和姿态;动力装置包括发动机和螺旋浆,提供动力驱动飞机前进。
3.操纵和控制固定翼飞机的操纵和控制可以分为三个部分,即飞行控制、动力控制和设备控制。
飞行控制主要包括升降舵、副翼和方向舵,用于控制飞机的升降、转向和横滚;动力控制主要包括油门和可变步进器,用于调节发动机输出的动力和推力;设备控制主要包括襟翼、襟纵调和抗襟翼,用于改变机翼的形状和角度,以及调节飞机的速度和升力。
4.机翼类型固定翼飞机的机翼类型可以分为直翼、梭形翼、三角翼、后掠翼和变形翼等。
直翼是最简单、最常用的一种机翼类型,具有结构简单、升力大、稳定性好等优点;梭形翼是一种流线型的机翼,具有阻力小、速度快等优点;三角翼一般用于高速飞行,具有高升阻比、良好的机动性等优点;后掠翼可以减小飞机的纵向稳定性,提高机动性和机速性能;变形翼可以改变机翼的形状和角度,适应不同的飞行任务。
固定翼飞机飞行原理固定翼飞机是一种通过翼面产生升力,依靠推进装置推进并通过舵面控制方向的飞行器。
它是目前最为广泛使用的飞行器之一,其基本原理是利用翼面产生的升力使得飞机离开地面并在空中飞行。
翼面产生升力的原理固定翼飞机的翼面是其产生升力的关键部分。
翼面的上表面较为平滑,下表面则是凸起的。
当飞机在空气中飞行时,空气会在翼面上下流动。
由于翼面上下表面的形状不同,空气在上表面流动时会形成一个比下表面快的气流,因为上表面的面积比下表面小,空气需要更快地流过翼面才能保持流量守恒。
这样一来,上表面的气流会产生低压,下表面的气流则会产生高压。
由于气体流动的物理特性,高压气体会向低压气体流动,因此空气会从下表面向上表面流动,形成一个向上的力,就是我们所说的升力。
翼面产生升力的大小与多个因素有关,包括翼面的形状、翼面的面积、空气的密度、飞机的速度等等。
升力的大小可以通过气动力学公式来计算,但一般情况下,飞机的设计师会根据经验和实验来确定翼面的形状和面积,以达到理想的升力大小。
推进装置推进飞机的原理除了翼面产生的升力外,固定翼飞机还需要推进装置来提供足够的推力,使得飞机可以在空中飞行。
推进装置的种类有很多,包括螺旋桨、喷气发动机等等。
这里以螺旋桨为例来说明推进装置的原理。
螺旋桨的原理是利用旋转的螺旋桨叶片将空气向后推进,从而产生推力。
螺旋桨的叶片形状和数量都会影响推力的大小和效率。
一般情况下,螺旋桨的叶片数目越多,推力越大,但也会带来一些不利影响,比如噪音和振动等。
因此,设计师需要在推力大小和其他因素之间进行权衡,以确定最适合的螺旋桨设计。
舵面控制方向的原理除了升力和推力,固定翼飞机还需要通过舵面来控制方向。
舵面的种类有很多,包括方向舵、升降舵、副翼等等。
这里以方向舵为例来说明舵面控制方向的原理。
方向舵位于飞机的垂直尾翼上,可以左右旋转,从而改变飞机的方向。
当方向舵向左旋转时,会产生一个向右的力矩,使得飞机向右转向;当方向舵向右旋转时,则会产生一个向左的力矩,使得飞机向左转向。
固定翼无人机飞行原理
固定翼无人机的飞行原理主要依靠空气动力学的原理。
它通过设计独特的机翼形状和结构,利用空气的流动来产生升力和推力,从而实现飞行。
首先,固定翼无人机的机翼是其最重要的部分。
机翼采用了翼型,即机翼剖面的横截面形状,通常是对称翼型或非对称翼型。
在飞行时,机翼上下表面的气流速度和压力分布不同,产生了压差。
这种压差使得空气从高压区流向低压区,从而产生升力。
其次,固定翼无人机还依靠推力进行飞行。
推力通常由发动机产生,通过螺旋桨或喷气发动机喷出的高速气流向后推进,从而产生推力。
推力的大小取决于发动机的输出功率和螺旋桨的旋转速度。
而实现固定翼无人机的前进运动主要依靠飞机的姿态控制,这包括飞行速度、俯仰角和滚转角的调整。
调整俯仰角可以改变升力和重力之间的平衡关系,实现向上爬升或向下俯冲。
而调整滚转角可以改变飞机的旋转方向。
最后,固定翼无人机还需要通过舵面控制产生的力矩来实现姿态的调整。
舵面包括副翼、升降舵和方向舵,它们可以改变机翼和尾翼的迎角,从而控制飞机的姿态。
这些舵面的运动由电动执行机构或液压执行机构驱动。
综上所述,固定翼无人机的飞行主要依靠机翼产生的升力和推力,通过姿态控制和舵面控制来实现飞行方向和姿态的调整。
这种飞行原理使得固定翼无人机能够稳定地在空中飞行,并完成各种任务。
为什么飞机能够在空中飞行探秘空气动力学的原理为什么飞机能够在空中飞行探秘空气动力学的原理飞机可以在空中自由飞行,这是人类长期以来梦寐以求的成就之一。
然而,它的实现离不开空气动力学的原理,这是关于空气流动、气动力和机翼等航空要素的研究领域。
本文将介绍为什么飞机能够在空中飞行,并探秘空气动力学的基本原理。
一、空气动力学的基本原理空气动力学是研究气体在运动过程中所产生的力的科学,它在飞机工程中具有重要的应用。
空气动力学的基本原理可以简单地概括为两个方面:气流的继续性和气流的黏性。
1. 气流的继续性:根据伯努利定律,当气体在速度增加的同时,其压力必然下降。
这就是为什么飞机机翼上表面的气流速度更快,而下表面的气流速度相对较慢。
由于上表面气流速度快,压力低,而下表面气流速度慢,压力高,就会在机翼上产生一个向上的升力,使飞机能够在空中飞行。
2. 气流的黏性:当气流通过飞机机翼时,气流会分离成两个不同的流动层:脱离层和黏附层。
脱离层是不紧贴机翼表面的气流层,黏附层则是贴着机翼表面流动的气流层。
由于黏性力的作用,黏附层的气流能够保持与机翼表面的接触,使得机翼上的升力更为有效。
二、为什么飞机能够在空中飞行飞机能够在空中飞行的原理主要是基于空气动力学的原理。
在飞行过程中,飞机的机翼起到了至关重要的作用,其中的升力是使飞机在空中飞行的关键。
1. 机翼的形状和弯曲:飞机的机翼是一种特殊形状的翼面,通常呈弯曲状态。
这种弯曲造成了上下表面之间的不对称性,从而使得飞机在空中飞行时能够产生足够的升力。
2. 升力的产生:当飞机在空中以一定速度飞行时,空气会在机翼表面上形成一个负压区,同时在机翼下表面形成一个正压区。
这种压力差异会产生升力,使得飞机得以克服地球引力,实现在空中飞行。
3. 控制飞行方向:除了升力之外,飞机还需要通过控制飞机的方向来实现在空中的飞行。
这一点主要通过飞机的方向舵、副翼和升降舵来完成,进一步控制飞机的流线型和姿态。
固定翼飞机飞行原理固定翼飞机的主要部件包括机身、机翼、机尾和机翼襟翼等。
机身是固定翼飞机的骨架和主要承载结构,容纳驾驶舱、客舱以及货舱等。
机身的形状和材料选择对飞机的性能有着重要影响。
机翼是固定翼飞机最重要的构件,通过其形状和产生的升力支撑着飞机的重量。
机尾包括水平尾翼和垂直尾翼,主要用于保持飞机的稳定性。
在飞行过程中,固定翼飞机的飞行原理主要涉及到气动力学中的升力和阻力。
升力是固定翼飞机在飞行中所产生的向上的力,它的大小直接决定着飞机能否在空中飞行。
而阻力是飞机在飞行中所遇到的空气阻力,其大小与飞机的速度、空气密度和形状等因素有关。
固定翼飞机产生升力的原理可以通过伯努利定律和牛顿第三定律来解释。
伯努利定律说明了空气在流经翅膀上表面和下表面时速度和压力之间的关系。
当空气在翅膀上表面流动时,由于翅膀的弯曲形状,空气速度增加,压力降低。
而在翅膀下表面,由于曲率的减小,空气速度减小,压力增加。
根据伯努利定律,速度增加伴随着压力降低,从而在翅膀上表面产生了较低的气压。
而在翅膀下表面,速度减小导致压力增加,形成较高的气压。
这种压力差会产生一个向上的升力,支撑着飞机的重量,使其能够在空中飞行。
除了翅膀产生的升力,固定翼飞机还需要克服阻力才能保持在空中飞行。
阻力可以分为主要阻力和附加阻力。
主要阻力来自于飞机的空气动力学,包括气流摩擦阻力、压力阻力和涡阻力等。
附加阻力则是来自于飞机的各个部件,如机身和机翼的阻力。
飞机通过提供足够的推力来克服阻力,使飞机保持飞行速度。
总结来说,固定翼飞机的飞行原理是通过发动机产生推力,驱动飞机前进,同时通过翅膀产生的升力来支撑飞机的重量,使其能够在空中飞行。
这一原理是基于气动力学的伯努利定律和牛顿第三定律,并通过飞机的控制机构来实现飞机的操控。
空气动力学飞机在空中飞行的原理与分类空气动力学飞机是目前最常见的航空器,它是通过利用空气动力学原理在大气中实现飞行的。
本文将介绍空气动力学飞机在空中飞行的原理以及常见的分类。
一、空气动力学飞机的原理1. 升力与重力平衡原理空气动力学飞机能够在空中飞行的关键在于升力与重力的平衡。
升力是飞机在飞行过程中产生的垂直向上的力,它是由飞机的机翼通过气动力学原理产生的。
重力是由地球对飞机的吸引力产生的垂直向下的力。
飞机需要通过调节升力和重力的平衡来保持稳定的飞行。
2. 推力与阻力平衡原理推力是飞机的发动机产生的向前的力,它推动着飞机在空中前进。
阻力是由空气对飞机运动的阻碍力,包括飞机外形的阻力、空气黏性产生的阻力以及升力产生的阻力。
飞机需要调节推力和阻力的平衡来保持适当的速度和飞行方向。
3. 控制与稳定原理飞机的控制与稳定是空中飞行的另一个重要因素。
飞机通过控制机翼、尾翼、副翼、方向舵等控制面来控制飞行姿态和方向。
稳定性是指飞机在飞行过程中保持稳定状态的能力,它与飞机的气动特性密切相关。
飞行员通过控制飞机的操纵杆和脚踏板来实现对飞机的控制与稳定。
二、空气动力学飞机的分类1. 固定翼飞机固定翼飞机是最常见的空气动力学飞机,它通过机翼产生升力来实现飞行。
固定翼飞机包括民用客机、货机、军用飞机、喷气式飞机、涡桨飞机等。
固定翼飞机具备较高的速度、较大的载重能力和较长的续航能力,其设计和制造具有较为成熟的经验和技术。
2. 直升机直升机是一种能够垂直起降并在空中悬停的飞行器。
它通过旋转桨叶产生升力,实现飞行和悬停。
直升机具备垂直起降的能力和悬停能力,适用于狭小的起降场地和特殊任务,如救援、运输、巡逻和医疗等。
3. 无人机无人机是一种没有驾驶员的遥控飞行器。
它由电池供电,通过遥控器或自主飞行系统进行控制和导航。
无人机的应用领域广泛,包括军事侦查、航拍摄影、物流配送、农业植保、科学研究等。
无人机的设计和制造也在不断发展和改进。
固定翼无人机飞行原理1. 空气动力学原理:固定翼无人机的飞行原理基于空气动力学原理,通过空气的流动来产生升力和推力。
当无人机在空中飞行时,翼面上的气流会由机翼上表面和下表面同时流动,而上表面流动速度较快,下表面流动速度较慢。
这种速度差异会在机翼上方产生一个较低气压区域,同时在机翼下方产生一个较高气压区域。
这种气压差会使得机翼受到向上的力,即升力。
2. 板翼设计:固定翼无人机的翼面设计非常重要。
一般来说,机翼的形状会影响气流的流动,从而影响升力的产生。
教材上表明,扁平翼面可以产生更大的升力,但也会增加阻力。
而椭圆形的机翼则能够达到更高的升力系数和更低的阻力系数。
所以,不同型号的固定翼无人机有着不同的翼面设计以满足其飞行需求。
3. 推力来源:除了升力,固定翼无人机还依靠推力来推动自身前进。
推力的来源主要有两种,一种是内燃机或者电动机通过螺旋桨产生的前向推力,另一种是采用喷气式动力装置,在尾部喷出气流产生推力,例如喷气式无人机。
4. 操纵和控制:固定翼无人机依靠机载的舵面(如副翼、升降舵和方向舵)来进行操纵和控制。
通过控制各个舵面的运动,可以改变机翼和尾翼所受到的气流,从而调整姿态和飞行方向。
此外,配备有相关传感器和计算设备的无人机还可以通过自主控制系统进行飞行控制和导航。
5. 稳定性和平衡:为了保持固定翼无人机的稳定性和平衡,通常会采取一些措施。
比如,在机翼的前缘设置一些辅助面,如颤振面,以增加飞行的稳定性。
此外,还需要进行重心的调整,使得无人机在飞行时保持平衡。
总结起来,固定翼无人机的飞行原理主要涉及到空气动力学、翼面设计、推力来源、操纵和控制以及稳定性与平衡等方面。
这些原理的相互作用使得固定翼无人机能够在空中飞行并完成各种任务。
固定翼飞机原理固定翼飞机是一种能够在大气层中飞行的航空器,它是利用空气动力学原理来产生升力并实现飞行的。
固定翼飞机的原理主要包括机翼结构、气动力学特性、动力系统和操纵系统等方面。
首先,机翼结构是固定翼飞机的重要组成部分。
机翼的主要功能是产生升力,使飞机能够腾空而起。
机翼通常采用对称翼型或者半对称翼型,通过机翼的前缘和后缘的形状以及横截面的设计,使得空气在机翼上、下表面的流动产生不同的气压,从而产生升力。
此外,机翼上还配有襟翼、副翼等辅助设备,用来调节飞机的姿态和飞行性能。
其次,气动力学特性是固定翼飞机飞行的基础。
当固定翼飞机在空气中飞行时,机翼表面受到气流的作用,产生升力和阻力。
同时,飞机的机身、尾翼等部件也会受到气流的影响,产生升力和阻力。
通过对气动力学特性的研究和分析,可以优化飞机的设计,提高飞行效率和安全性。
另外,动力系统是固定翼飞机的动力来源。
通常固定翼飞机采用喷气发动机或者螺旋桨发动机来提供动力,推动飞机前进。
喷气发动机通过燃烧燃料产生高温高压气流,产生推力推动飞机前进;螺旋桨发动机则通过旋转螺旋桨产生推进力。
动力系统的性能直接影响着飞机的飞行速度、爬升率和续航能力。
最后,操纵系统是固定翼飞机的控制中枢。
操纵系统包括飞行操纵系统和动力操纵系统两部分。
飞行操纵系统通过操纵桨叶、襟翼、副翼等设备,控制飞机的姿态和飞行轨迹;动力操纵系统通过操纵油门、螺旋桨角度等设备,调节飞机的速度和动力输出。
操纵系统的灵活性和稳定性对飞机的飞行安全和操纵性能有着重要影响。
总之,固定翼飞机的原理涉及机翼结构、气动力学特性、动力系统和操纵系统等多个方面,它们相互作用,共同保障了飞机的飞行能力和安全性。
通过对固定翼飞机原理的深入了解和研究,可以不断提高飞机的性能和飞行品质,推动航空技术的发展和进步。
固定翼无人机】固定翼的飞行教程及原理无人机按照不同的特点和用途可以被分为多种不同的类型。
其中,固定翼无人机是一种重要的无人机分类。
固定翼无人机与其他类型的无人机有着明显的区别,其飞行原理也有所不同。
固定翼无人机的基本特点固定翼无人机具有以下基本特点:固定翼结构:固定翼无人机采用类似传统飞机的固定翼结构,即有固定的机翼。
这种设计使得固定翼无人机在飞行时能够产生升力,并具备较好的飞行稳定性。
固定翼结构:固定翼无人机采用类似传统飞机的固定翼结构,即有固定的机翼。
这种设计使得固定翼无人机在飞行时能够产生升力,并具备较好的飞行稳定性。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
飞机最基本的飞行原理是
大致可分为以下几个方面:
1. 空气动力学:飞机的飞行原理是基于空气动力学的原理,即通过飞机的机翼等气动构件形成升力,以克服重力使飞机在空中飞行。
飞机的机翼形状和倾角会产生气流在上下表面之间产生不同的压力,从而产生升力。
同时,通过操纵飞机的机尾翼、副翼等控制面,可以改变飞机的姿态和方向。
2. 推力和阻力平衡:除了升力外,飞机还需克服阻力,以保持飞行速度。
推力由发动机提供,通过喷气或螺旋桨等装置向后方向产生推力。
阻力则包括飞机与空气的摩擦阻力、压阻和感应阻力等。
推力和阻力之间的平衡与飞机的速度息息相关。
3. 操纵系统:飞机通过操纵系统来调整姿态和方向。
操纵系统包括控制面、操纵线索和操纵杆等,并通过机械、液压或电子等方式与飞行员的操纵指令相连。
通过操纵这些系统,飞行员可以调整飞机的升力、阻力和姿态等参数,以实现飞行轨迹的控制。
总之,飞机的基本飞行原理是通过利用升力和推力克服重力和阻力,通过操纵系统实现对飞行器的控制和调整。
固定翼飛機
飛行原理簡介
1
2
甲、固定翼飛機之基本空氣動力學
一、空氣動力之型式 下洗氣流改變相對風方向 並且 e a U L ⊥
而e a U D --- a L 及a D 皆以ac 為施力 點,但a M 與ac 無關。
a D 不等於飛行的阻力(§三)
二、空氣動力之數學 --- air ρ:空氣密度 --- S :翼面積 a L 、a D 及a M 之量化關係: l a i r
l e a i r a SC U SC U L 221221ρρ≈= d air a SC U D 221ρ≈、m air
a SC U M 221ρ≈ --- l C 、d C 、m C :與α成右圖之函數關係的常數
討論:(1) m C 幾乎與α無關 (2) l C 與α的函數存在有線性區 a L 函數之線性關係:αw l a C = --- w a :線性區之函數斜率
--- w a 的值為機翼之3D 形狀的函數
遠對相端
3
翼弦彎曲(camber)的效應之一
(1) 翼弦彎曲會使升力曲線左右移動,其效果等於改變有效攻角
(2) 線性區之升力係數變為 )(ζα-=w l a C --- ζ:camber 之函數
翼尾控制面之作用原理
--- 翼尾控制面之擺動等於改變翼面之彎曲 --- 這樣的彎曲使得 τδζ≈,10≤≤τ --- 因此,升力係數變為)(τδα-=w l a C
翼面3D 形狀的影響
(1) 翼面的展弦比(AR)將影響 w a 及ε --- AR 的定義為翼展的平方除以翼面積
==> 翼展越大的翼面其AR 也越大
--- AR 愈大w a 也增大,但ε則變小
(2) 翼面的形狀將決定ac 的位置(右圖) --- 一般翼面的ac 在右圖兩例之間
U e
U e
U e U e
U e
4
翼面其他運動的影響
● 翼面的運動將改變相對氣流的方向,從而改變機翼的攻角
●
一般而言,U u s <<,因此 U u s r /-≈-≈ασαα
【另例】飛機旋轉所致的翼面(相對於CG 的)運動
● 機體的旋轉將造成控制翼面有相較於CG 的相對運動,從而改變了這些控制翼
面的有效攻角。
這些控制翼面有效攻角的改變將產生額外的力或力矩。
三、航行升力與航行阻力 ---
U 為飛航的反方向
εεsin cos a a T D L L -=、εεsin cos a a T L D D += 一般,a a D L >>且1<<ε a T L L ≈⇒
εa a T L D D +≈⇒ εa L 稱為誘導阻力 ==> a D 稱為濕阻力
r r
l vt r
q X t
u s = p T
乙:固定翼飛機動態特性概述
一、固定翼飛機之自由度與運動方式
q M
,:俯仰速率(力矩)
r N,:橫搖速率(力矩)
x-axis:前後(速度)
y-axis:左右(側滑)
z-axis:上下(升降)
二、定翼飛機之力平衡
---水平飛行狀態
5
6
7
三、控制飛行動作的管道 -- 升降舵、方向舵、副翼、油門
※一般而言,飛機的直線運動必須透過旋轉運動來達成。
==> 如「加減速與升降」透過
四、改變飛行狀態之要件,譬如:爬昇、轉彎、等
8
五、飛行體的運動模式
○嚴格來說,一架飛機的六個運動自由度是相互偶合而無法分開獨立
變化的。
○然而,大體而言,一架飛機的所有的旋轉運動通常都不會是很劇烈,在這種情況之下,某些自由度之間的偶合現象將小到可以忽略。
此
時,飛行體的六個運動自由度將形成兩組幾乎是互相獨立的運動模
式,茲分述如下:
1.飛行體之縱向運動:
a.自由度 - 俯仰(pitching)、升降、速度變化
b.考慮項目 - 俯仰角度、俯仰速率、俯仰力矩、飛行速度、飛
機的功角、升力,阻力與推力。
c.控制管道 - 升降舵,油門。
2.飛行體之橫向運動:
a.自由度 - 側滾(rolling)、橫搖(yawing)、側滑(side slip)
b.考慮項目 - 側滾角度、側滾力矩、橫搖力矩、橫搖速率、側
滑角度、飛機的轉彎速率。
c.控制管道 - 方向舵、副翼。
9
10
附錄一:飛機功角與側滑角之詳細定義
○飛機之功角α與側滑角β乃是就相對風而定義(下圖左)。
●對於靜止的大氣,相對風即是飛機本身速度之逆向量。
●若有陣風出現,則相對風為飛機速度之逆向量跟陣風的向量和。
○機翼之功角為飛機縱軸跟相對風在縱向面(x-z 平面)的夾角,至於側滑角則是飛機縱軸跟相對風在橫向面(x-y 平面)的夾角。
● 若飛機沒有旋轉運動,則α=w U /以及β=v U /。
此時,改變w 等於改變α,
而改變v 也等於改變β,也就是∆∆α=w U /以及∆∆β=v U /。
● 另一方面,飛機的俯仰動作也會改變功角。
換言之,如果飛機在改變w 的同時
也改變了俯仰角θ,則功角的改變量將成為∆∆∆αθ=+w U /。
同樣地,若飛機在改變v 的同時也改變了橫搖角ψ,則側滑角的改變量將成為∆∆∆βψ=+v U /(下圖右)。
11。