控制工程基础精品课程
- 格式:docx
- 大小:36.91 KB
- 文档页数:1
《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程的概念、内容和研究方法理解控制工程在工程实践中的应用和重要性1.2 控制系统的基本概念定义系统、输入、输出和反馈区分开环系统和闭环系统1.3 控制工程的目标掌握稳定性、线性、非线性和时变性等控制系统的特性学习控制系统的设计方法和步骤第二章:数学基础2.1 线性代数基础掌握向量、矩阵和行列式的基本运算学习线性方程组和特征值、特征向量的求解方法2.2 微积分基础复习极限、连续性和微分、积分的基本概念和方法应用微积分解决实际问题2.3 复数基础了解复数的概念、代数表示法和几何表示法学习复数的运算规则和复数函数的性质第三章:控制系统分析3.1 传递函数定义传递函数的概念和性质学习传递函数的绘制和解析方法3.2 频率响应分析理解频率响应的概念和特点应用频率响应分析方法评估系统的性能3.3 根轨迹分析掌握根轨迹的概念和绘制方法分析根轨迹对系统稳定性的影响第四章:控制系统设计4.1 控制器设计方法学习PID控制器的设计原理和方法了解模糊控制器和神经网络控制器的设计方法4.2 控制器参数调整掌握控制器参数调整的目标和方法应用Ziegler-Nichols方法和频域方法进行参数调整4.3 系统校正和优化理解系统校正的概念和目的学习常用校正方法和优化技术第五章:现代控制理论5.1 状态空间描述了解状态空间的概念和表示方法学习状态空间方程的求解和状态反馈控制5.2 状态估计和最优控制掌握状态估计的概念和方法学习最优控制的目标和求解方法5.3 鲁棒控制和自适应控制理解鲁棒控制的概念和特点了解自适应控制的设计方法和应用场景第六章:线性系统的稳定性分析6.1 稳定性的定义和性质理解系统稳定性的概念和重要性学习稳定性分析的基本方法6.2 劳斯-赫尔维茨准则掌握劳斯-赫尔维茨准则的原理和应用应用劳斯-赫尔维茨准则判断系统的稳定性6.3 李雅普诺夫方法了解李雅普诺夫方法的原理和分类学习李雅普诺夫第一和第二方法判断系统的稳定性第七章:线性系统的控制器设计7.1 控制器设计概述理解控制器设计的目标和重要性学习控制器设计的基本方法7.2 PID控制器设计掌握PID控制器的设计原理和方法应用PID控制器进行系统控制7.3 状态反馈控制器设计了解状态反馈控制器的设计原理和方法学习状态反馈控制器的设计和应用第八章:非线性控制系统分析8.1 非线性系统概述理解非线性系统的概念和特点学习非线性系统分析的基本方法8.2 非线性系统的描述方法学习非线性系统的数学模型和描述方法应用非线性系统分析方法研究系统的性质8.3 非线性控制系统的应用了解非线性控制系统在工程实践中的应用学习非线性控制系统的设计和优化方法第九章:鲁棒控制理论9.1 鲁棒控制概述理解鲁棒控制的概念和重要性学习鲁棒控制的基本方法9.2 鲁棒控制设计方法掌握鲁棒控制设计的原则和方法应用鲁棒控制设计方法设计控制器9.3 鲁棒控制在控制系统中的应用了解鲁棒控制在实际控制系统中的应用学习鲁棒控制在控制系统中的设计和优化方法第十章:控制系统仿真与实验10.1 控制系统仿真概述理解控制系统仿真的概念和重要性学习控制系统仿真的基本方法10.2 MATLAB控制系统仿真掌握MATLAB控制系统仿真工具的使用应用MATLAB进行控制系统仿真和分析10.3 控制系统实验了解控制系统实验的目的和重要性学习控制系统实验的方法和技巧重点和难点解析重点环节1:控制系统的基本概念和特性控制系统的基本概念,包括系统、输入、输出和反馈区分开环系统和闭环系统掌握稳定性、线性、非线性和时变性等控制系统的特性重点环节2:传递函数和频率响应分析传递函数的概念和性质,传递函数的绘制和解析方法频率响应的概念和特点,频率响应分析方法分析根轨迹对系统稳定性的影响重点环节3:控制器设计方法和参数调整控制器设计方法,包括PID控制器、模糊控制器和神经网络控制器的设计原理和方法控制器参数调整的目标和方法,应用Ziegler-Nichols方法和频域方法进行参数调整重点环节4:状态空间描述和最优控制状态空间的概念和表示方法,状态空间方程的求解和状态反馈控制状态估计和最优控制的目标和求解方法重点环节5:非线性控制系统分析和鲁棒控制理论非线性系统的概念和特点,非线性系统分析的基本方法鲁棒控制的概念和重要性,鲁棒控制的基本方法重点环节6:控制系统仿真与实验控制系统仿真的概念和重要性,控制系统仿真的基本方法MATLAB控制系统仿真工具的使用,应用MATLAB进行控制系统仿真和分析控制系统实验的目的和重要性,控制系统实验的方法和技巧全文总结和概括:本教案涵盖了控制工程基础的十个章节,主要包括控制系统的基本概念和特性、传递函数和频率响应分析、控制器设计方法和参数调整、状态空间描述和最优控制、非线性控制系统分析和鲁棒控制理论以及控制系统仿真与实验。
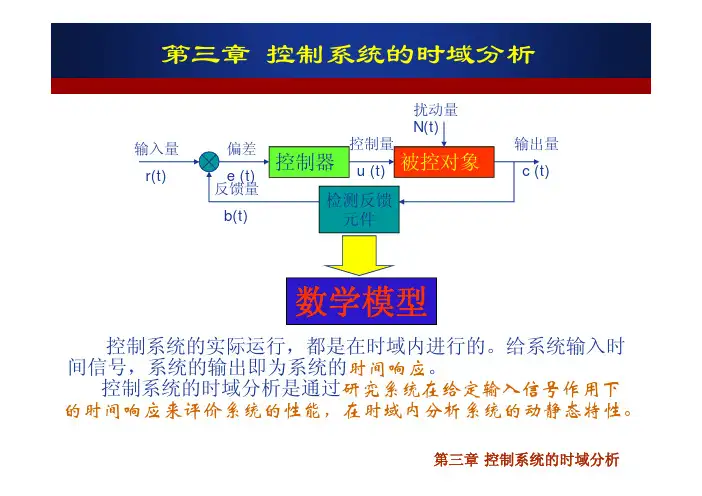
第一章 绪论内容提要一、基本概念1.控制:由人或用控制装置使受控对象按照一定目的来动作所进行的操作。
2.输入信号:人为给定的,又称给定量。
3.输出信号:就是被控制量。
它表征对象或过程的状态和性能。
4.反馈信号:从输出端或中间环节引出来并直接或经过变换以后传输到输入端比较元件中去的信号,或者是从输出端引出来并直接或经过变换以后传输到中间环节比较元件中去的信号。
5.偏差信号:比较元件的输出,等于输入信号与主反馈信号之差。
6.误差信号:输出信号的期望值与实际值之差。
7.扰动信号:来自系统内部或外部的、干扰和破坏系统具有预定性能和预定输出的信号。
二、控制的基本方式1.开环控制:系统的输出量对系统无控制作用,或者说系统中无反馈回路的系统,称为开环控制系统。
2.闭环控制:系统的输出量对系统有控制作用,或者说系统中存在反馈回路的系统,称为闭环控制系统。
三、反馈控制系统的基本组成1.给定元件:用于给出输入信号的环节,以确定被控对象的目标值(或称给定值)。
2.测量元件:用于检测被控量,通常出现在反馈回路中。
3.比较元件:用于把测量元件检测到的实际输出值经过变换与给定元件给出的输入值进行比较,求出它们之间的偏差。
4.放大元件:用于将比较元件给出的偏差信号进行放大,以足够的功率来推动执行元件去控制被控对象。
5.执行元件:用于直接驱动被控对象,使被控量发生变化。
6.校正元件:亦称补偿元件,它是在系统基本结构基础上附加的元部件,其参数可灵活调整,以改善系统的性能。
四、控制系统的分类(一)按给定信号的特征分类1. 恒值控制系统2. 随动控制系统3. 程序控制系统(二)按系统的数学描述分类1. 线性系统2. 非线性系统(三)按系统传递信号的性质分类1. 连续系统2. 离散系统(四)按系统的输入与输出信号的数量分类1. 单输入单输出系统2. 多输入多输出系统(五)按微分方程的性质分类1. 集中参数系统2. 分布参数系统五、对控制系统的性能要求1. 稳定性:指系统重新恢复稳态的能力。
控制工程基础精品课程
《控制工程基础》课程是一门非常重要的课程,也是工程类学生
必修的一门课程。
在这门课程中,学生将学习到控制系统的基本概念、控制方式、传感器、执行器、控制算法等内容,从而为以后的工程实
践奠定坚实的基础。
本课程的教学目标是:让学生深入了解控制系统的原理及其各个
组成部分的性能指标,并能够灵活运用所学知识,设计各种类型的控
制系统,具备一定的实际操作经验。
本课程的教学内容包括:
1. 控制系统的基础知识,包括控制系统的定义、目的和分类等。
2. 传感器和执行器的基本原理和性能指标,以及它们在控制系
统中的作用和应用。
3. 控制系统的动态特性,包括系统的时域响应和频域响应等。
4. 控制算法的基本原理和常用的控制方法,如比例控制、积分
控制、比例积分控制、PID控制等。
5. 控制系统的稳定性、鲁棒性和性能指标的分析与设计。
6. 控制系统的修正和优化方法,在实际操作中灵活应用。
教学方法上,本课程采用讲授和实验相结合的方式,注重理论与
实践相结合,通过实验操作让学生更好地理解系统原理和掌握实际操
作技能。
教师可以借助仿真软件进行教学,在课堂上对仿真结果进行
分析和讲解,让学生更好地理解各种控制算法的应用范围和优化方法。
此外,本课程还注重学生的自主学习和实践能力的培养,课程设
计中设置了一些自主学习环节,让学生通过学习文献、自主设计实验
等方式掌握知识点,提高了学生的学习兴趣和研究能力。
总之,《控制工程基础》课程为学生提供了系统的控制工程知识
和实践技能,培养了学生的研究能力、创新能力和解决实际问题能力,为将来从事控制工程相关的工作奠定了坚实的基础。