同步电机调速
- 格式:ppt
- 大小:1021.50 KB
- 文档页数:17
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
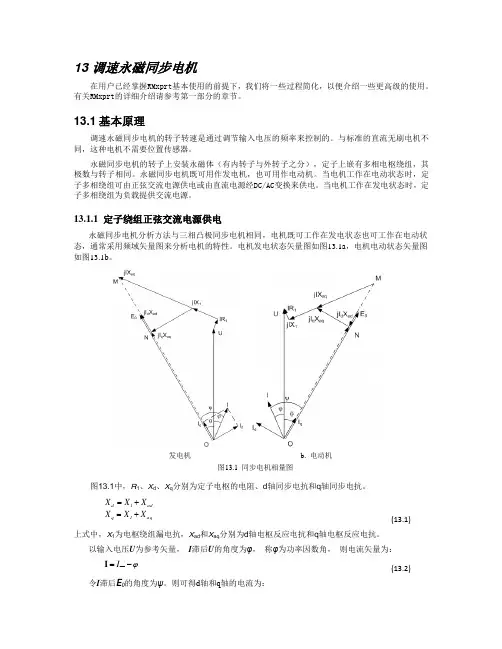
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
调速永磁同步电动机的电磁设计与磁场分析1 引言与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。
随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速永磁同步电动机也应运而生。
变频调速永磁同步电动机可分为两类,一类是反电动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另一类是两种波形都是正弦波的一般意义上的永磁同步电动机。
这类电机通常由变频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。
本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行了瞬态特性分析。
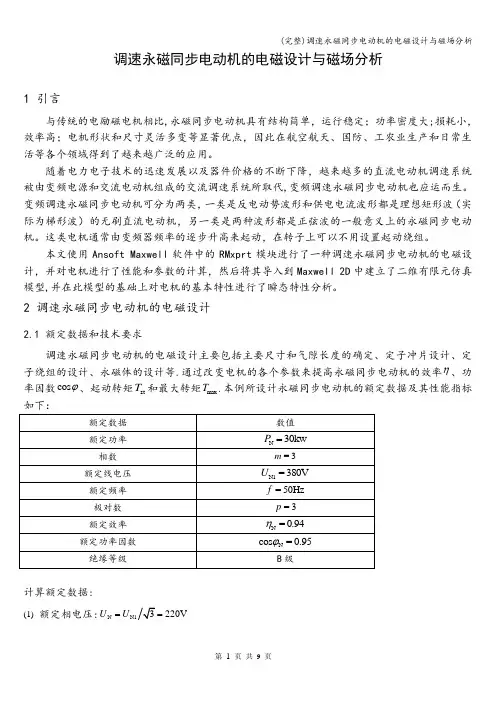
2 调速永磁同步电动机的电磁设计2.1 额定数据和技术要求调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子冲片设计、定子绕组的设计、永磁体的设计等.通过改变电机的各个参数来提高永磁同步电动机的效率η、功率因数cos ϕ、起动转矩st T 和最大转矩max T .本例所设计永磁同步电动机的额定数据及其性能指标如下:计算额定数据:(1) 额定相电压:N 220V U U ==(2) 额定相电流:3N N N N N1050.9A cos P I mU ηϕ⨯== (3) 同步转速:160=1000r /min f n p= (4) 额定转矩:3N N 19.5510286.5N m P T n ⨯== 2.2 主要尺寸和气隙长度的确定永磁电机的主要尺寸包括定子内径和定子铁心有效长度,它们可由如下公式估算得到:2i11P D L C n '= N N N cos E K P P ηϕ'=, 6.1p Nm dp C K K AB δα=' 式中,i1D 为定子内径,L 为定子铁心长度,P '为计算功率,C 为电机常数。
2021年第49卷第3期D设计分析esign and analysis 程献会等 永磁同步电动机调速范围的优化及性能分析17 收稿日期:2020-11-24基金项目:山西省自然基金(2013011035-1);中国博士后科学基金(2018M640250)永磁同步电动机调速范围的优化及性能分析程献会,王淑红(太原理工大学电气与动力工程学院,太原030024)摘 要:根据内嵌式调速永磁同步电动机的弱磁控制特点,以弱磁扩速倍数为优化目标,利用有限元仿真软件,分析了内嵌式调速永磁同步电动机矩形和V 形永磁体尺寸和位置对电机参数和调速范围的影响,通过优化永磁体的位置和尺寸扩大了电机弱磁调速范围㊂计算了优化后电机的参数,对比了优化前后电机调速的范围㊂为内嵌式调速永磁同步电动机的优化和参数计算提供一定的参考㊂关键词:内嵌式调速永磁同步电动机;永磁体尺寸;调速范围;有限元分析中图分类号:TM351 文献标志码:A 文章编号:1004-7018(2021)03-0017-04Optimization and Performance Analysis of Speed Control Range of Permanent Magnet Synchronous MotorCHENG Xian -hui ,WANG Shu -hong(School of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan 030024,China)Abstract :According to the embedded control weak magnetic control characteristics of permanent magnet synchronousmotor,with weak magnetic speed ratio as the optimization goal,and using finite element simulation software,embedded speed permanent magnet synchronous motor was analyzed rectangle and V the size and position of permanent magnet motor parameters and the influence of the speed range,through optimizing the position and size of the permanent magnet motor weak magnetic speed range had expanded.The parameters of the optimized motor were calculated,and the range of motor speed before and after optimization was compared.It provided a certain basis for the optimization and parameter calculationof the built-in speed-regulating permanent magnet synchronous motor.Key words :built-in speed-regulating permanent magnet synchronous motor,permanent magnet size,speed regulatingrange,finite element analysis0 引 言永磁同步电动机具有结构简单㊁运行可靠㊁效率高等显著优点,其应用范围较为广泛,在航空㊁国防㊁工业生产和日常生活中都可以看到它的身影[1-2]㊂已有许多专家学者对永磁同步电动机进行过优化设计,从而使电机性能更优越,使用更广泛㊂文献[3]采用田口法,以电机的效率和磁钢用量作为优化目标,对内嵌式永磁电动机进行优化设计;文献[4]同样采用田口法对铁耗和转矩脉动进行了优化㊂文献[5-6]对电动汽车用永磁同步电动机进行了电磁设计和弱磁调速分析;文献[7]中搭建了凸极式永磁同步电动机弱磁调速的控制系统;文献[8]从内置式永磁同步电动机的数学模型及弱磁控制方式入手,采用数值计算方法,分析了不同参数对电机弱磁调速的影响;文献[9]讨论了永磁体分段对永磁同步电动机参数和调速范围的影响;文献[10]设置了一种分段Halbach 结构的表贴式永磁同步电动机以降低涡流损耗等;文献[11]对V 形异步起动永磁同步电动机的齿槽转矩进行了优化;文献[12]采用多目标遗传算法对不同类型的电机结构进行优化㊂对于调速永磁同步电动机,在传统的控制方法下,电机受到电源电压和电流的限制,基速以上很难有较大的调速范围㊂为了扩大电机的调速范围,并确保电机的恒功率运行范围和电机性能,不仅要采用带有弱磁控制模块的控制系统,电机本体参数也应与控制系统有较好的配合,满足弱磁调速策略对电机参数的要求㊂永磁同步电动机的励磁由电机转子上的永磁体提供,永磁体在电机制作时已放置好,励磁无法根据实际需要进行调节,所以在电机设计时应考虑永磁体的尺寸和位置,为弱磁调速控制提供合理的永磁体磁链及交直轴电感参数㊂本文在电机设计过程中,以弱磁调速的倍数为电机永磁体尺寸的优化目标,使用有限元仿真软件,对两种不同形状的永磁体电机进行参数化仿真,确定电机永磁体的位置和尺寸对电机调速范围的影响㊂分析了矩形永磁体和V 形永磁体在不同尺寸和位置,对电机参数的影响,给出永磁体的尺寸,完 D设计分析esign and analysis 2021年第49卷第3期 程献会等 永磁同步电动机调速范围的优化及性能分析 18 成对电机调速范围的优化并分析电机性能㊂1 永磁同步电动机弱磁调速的基本原理1.1 永磁同步电动机的数学模型在三相电流对称㊁电机稳定运行且忽略定子绕组电阻㊁铁心饱和㊁铁耗的情况下,永磁同步电动机在d,q坐标轴下的数学模型如式(1)㊁式(2)㊂电压方程:u=u2d+u2q= ω(L q i q)2+(L d i d+ψf)2(1)电磁转矩方程:T em=32p[ψf i q+(L d-L q)i d i q](2)由电压方程可得出:ω=u(L q i q)2+(L d i d+ψf)2(3)式中:p为电机的极对数;L q,L d分别为电机定子的交直轴电感;i q,i d分为电机定子的交直轴电流;ψf 是电机的永磁体磁链;ω为电机角频率㊂由式(3)可以看出,当电机的端电压和电流达到极限值,且电流全部为直轴去磁电流时,电机可以达到理想最大转速:ωmax=u limψf-L d i lim(4) 调速永磁同步电动机的电压和电流的极限值取决于控制系统的逆变器,如果需要更高的转速范围,需要减小永磁体的磁链和增加直轴电感㊂但过小的永磁体磁链会造成电机转矩的下降,在电机优化时应综合考虑,不应为了单纯提高调速范围而牺牲太多的转矩㊂1.2 基于最大转矩电流比控制的弱磁调速性能分析凸极永磁同步电动机采用最大转矩电流比控制时,电机的电流矢量应满足:∂(T em/i s)∂i d=0∂(T em/i s)∂i q=üþýïïïï(5) 定子电流矢量轨迹如图1所示,当电机的端电图1 定子电流矢量轨迹压和电流达到极限值时,经过公式推导可得出此时的转折速度:ωb=u lim(L q i lim)2+ψ2f+(L d+L q)C2+8ψf L d C16(L d-L q)(6)式中:C=-ψf+ψ2f+8(L d-L q)2i2lim㊂ 定义电机的弱磁扩速倍数:k=ωmaxωb(7) 将弱磁率ξ=L d i sψf和凸极率ρ=L qL d代入到式(7)中,可得:k=ωmaxωb= 1+(ρξ)2+116(1-ρ)[(1+ρ)C2f+8C f]1-ξ(8)式中:C f=-1+1+8(1-ρ)2ξ2㊂根据式(8)可得如图2所示的凸极永磁同步电动机弱磁扩速倍数随凸极率和弱磁率的变化曲线,可以看出,电机的弱磁扩速倍数随凸极率和弱磁率的增加而增加㊂对永磁同步电动机的凸极率和弱磁率进行优化,便可以影响电机的扩速范围㊂图2 弱磁扩速倍数k与ξ,ρ的关系2 永磁同步电动机优化分别对原功率为2.2kW,永磁体为矩形和V形的两台内置式永磁同步电动机进行优化,以弱磁率和凸极率为优化目标,使其满足两倍以上的调速范围㊂2.1 建立电机的物理模型样机的基本参数如表1所示,电机的物理模型如图3㊁图4所示㊂在电机基本结构尺寸不变的情况下,对电机的永磁体尺寸㊁位置进行优化,永磁体尺寸主要有永磁体宽度b m,永磁体磁化方向长度h m㊂矩形永磁体的位置主要靠轴心距确定,就是永磁体下边缘距离电机中心的距离,即o2㊂轴心距越大,永磁体离气隙越近,离电机转轴的中心则越远㊂V形永磁体的位置还要依靠永磁体旋转角度来确 2021年第49卷第3期 D设计分析esign and analysis 程献会等 永磁同步电动机调速范围的优化及性能分析19 定,旋转角为θ㊂表1 电机的基本参数参数值参数值定子外径Φso /mm 155定子槽数36定子内径Φsi /mm 98极对数2转子内径Φri /mm 38额定转速n /(r㊃min -1)1500气隙长度δ/mm0.6轴向长度l /mm105图3 矩形永磁体电机模型图4 V 形永磁体电机模型2.2 电机的优化在初步确定电机额定电流的情况下,对永磁体的尺寸范围进行优化设计㊂利用Maxwell 软件,分别建立两种永磁同步电动机的2D 模型,并设置永磁体宽度㊁磁化方向长度和轴心距为参数化变量,求解不同情况下的凸极率和弱磁率,参数化范围如表2㊁表3所示㊂表2 矩形永磁体参数矩形参数范围步长宽度b m /mm30~502磁化方向长度h m /mm4~5.50.5轴心距o 2/mm33~351表3 V 形永磁体参数V 形参数范围步长单片宽度b m /mm 15~242磁化方向长度h m /mm4~70.5轴心距o 2/mm30~351 对在此范围内的所有不同组合进行参数化扫描仿真,并进行最优化求解,最优化算法采用默认的拟牛顿算法,它是求解非线性优化问题最有效的方法之一,收敛速度快㊂最优化求解的目标为ρ≥1.5,ξ≥0.5,由图2可以看出,理论上满足3倍的调速范围㊂经过Maxwell的最优化求解,可得出永磁体宽度㊁永磁体磁化方向长度和轴心距的初选结果㊂2.2.1 永磁体的尺寸确定经过分析和有限元软件的计算,可得到ρ和ξ随电机永磁体尺寸的参数变化规律㊂矩形永磁体和V 形永磁体的变化规律都是随着电机永磁体厚度和磁化方向的增加,ρ增加且ξ下降;永磁体宽度对两个参数的影响更明显,如图5㊁图6所示㊂(a)矩形永磁体电机(b)V 形永磁体电机图5 凸极率和弱磁率随永磁体宽度的变化(a)矩形永磁体电机(b)V 形永磁体电机图6 凸极率和弱磁率随永磁体磁化方向长度的变化两个优化参数变化趋势并不相同,在有限元优化求解给出的结果下,要想达到优化目标,并考虑制作工艺难度㊂最后确定矩形永磁体尺寸确定为宽42mm,厚4mm;V 形永磁体尺寸确定为单片永磁体宽20mm,厚4mm㊂2.2.2 永磁体的位置确定在永磁体尺寸确定的情况下,随着轴心距的增加,如图7所示,矩形永磁体电机的ρ会增加,ξ会下降;V 形永磁体电机的ρ和ξ呈相同变化规律,凸极率增加,弱磁率下降㊂(a)矩形永磁体电机(b)V 形永磁体电机图7 凸极率和弱磁率随轴心距的变化经过优化求解,矩形永磁体电机轴心距选择35mm;V 形永磁体电机轴心距选择33mm㊂V 形永磁体不仅要考虑轴心距,还要考虑永磁体旋转的角度θ对交直轴电感的影响㊂如图8所示,随着旋转角度的增加,凸极率上升,弱磁率下降,最终旋转角选择23°㊂图8 凸极率和弱磁率随旋转角度的变化3 电机参数分析与对比3.1 矩形永磁体电机在永磁体尺寸和位置确定之后,对电机模型进行有限元仿真,电机的直轴电感为0.074H,交轴电感为0.143H,磁链为0.608Wb,仿真得出凸极率为1.93,弱磁率为0.597,满足求解目标㊂ D设计分析esign and analysis 2021年第49卷第3期 程献会等 永磁同步电动机调速范围的优化及性能分析 20 对优化后的电机进行MATLAB仿真分析,采用基于最大转矩电流比的弱磁控制方式,控制框图如图9所示㊂在空载及负载条件下进行仿真分析,对比优化前后电机的调速范围,结果如表4㊁图10所示㊂可以看出,优化后空载条件下调速范围可以达到两倍以上,负载下调速范围也明显提高,达到了优化的目的㊂图9 弱磁控制框图表4 矩形永磁体电机最高转速对比转矩T/(N㊃m)优化前n f/(r㊃min-1)优化后n a/(r㊃min-1)仿真实验仿真020001900310010185018002400(a)空载下电机转速(b)负载下电机转速图10 矩形永磁体电机转速优化3.2 V形永磁体电机对确定永磁体位置和尺寸的电机模型进行有限元仿真,电机的直轴电感为0.073H,交轴电感为0.142H,磁链为0.635Wb,凸极率为1.96,弱磁率为0.56,满足求解要求㊂对优化后的V形永磁体电机,进行基于最大转矩电流比的弱磁调速控制下的空载及负载仿真,结果如表5所示㊂空载可以达到两倍左右的调速范围,负载下速度也有所提高,满足优化目标,如图11所示㊂表5 V形永磁体电机最高转速对比转矩T/(N㊃m)转速n/(r㊃min-1)优化前优化后022003000 1020002450(a)空载下电机转速(b)负载下电机转速图11 V形永磁体电机转速优化4 结 语本文借助有限元仿真软件,以内嵌式永磁同步电动机的调速范围为优化目标,讨论了矩形和V形永磁体不同尺寸和位置对电机参数的影响,结合对调速范围的影响,确定了电机永磁体的尺寸和位置,完成了电机的优化设计㊂以优化完成的电机尺寸,对其进行参数分析和对比,较之前的电机有了明显的转速范围的提升,达到了本次优化的目的㊂优化过程和结果对内嵌式永磁同步电动机的设计和参数提供了一定的参考㊂参考文献[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2015.[2] 王秀和.永磁电机[M].北京:中国电力出版社,2011.[3] 贾金信,杨向宇,曹江华.基于田口法的内嵌式永磁电动机的优化设计[J].微电机,2013,46(6):1-4.[4] 王艾萌,温云.田口法在内置式永磁同步电机优化设计中的应用[J].华北电力大学学报(自然科学版),2016,43(3):39-44.[5] 陈晨.纯电动汽车用永磁同步电动机设计及弱磁扩速分析[D].天津:天津大学,2010.[6] 解志霖.电动大巴车用永磁电机设计[D].沈阳:沈阳工业大学,2017.[7] 郭殿林,陈康,包兵.电动汽车凸极式永磁同步电机弱磁调速的研究[J].煤矿机械,2016,37(7):58-60.[8] 皮秀,王善铭.弱磁调速的永磁同步电机参数的分析设计[J].中国科技论文在线,2010,5(8):585-591.[9] 孙慧芳,高琳,李计亮,等.弱磁调速用永磁同步电机设计分析[J].微电机,2010,43(12):16-20.[10] 高锋阳,齐晓东,李晓峰,等.部分分段Halbach永磁同步电机优化设计[J/OL].电工技术学报:1-14[2021-02-04].ht⁃tp:///10.19595/ki.1000-6753.tces.191554..[11] 李晓峰,高锋阳,齐晓东,等.对称V型异步起动永磁同步电机齿槽转矩优化[J/OL].电力系统及其自动化学报:1-9[2021-02-04]./10.19635/ki.csu-epsa.000497.[12] 刘晓宇,袁彬,戴太阳,等.基于自适应网格及响应面模型的永磁电机多目标优化[J].微特电机,2020,48(7):24-27,30.作者简介:程献会(1995 ),女,硕士研究生,研究方向为电机与电器㊂。
三相永磁同步电动机变频调速系统设计运动控制系统课程设计题目:三相永磁同步电动机变频调速系统设计专业班级:自动化姓名:学号:指导教师:摘要本论文在研究永磁同步电动机运行原理的基础上详细讨论了其变频调速的理论而且设计了一套基于DSP的永磁同步电动机磁场定向矢量控制系统。
永磁同步电动机相对感应电动机来说具有体积小、效率高以及功率密度大等优点,因此自从上个世纪80年代,随着永磁材料性能价格比的不断提高,以及电力电子器件的进一步发展,永磁同步电动机的研究也进入了一个新的阶段。
由于永磁同步电动机自身具有比感应电动机更为优越的性能,而且其dq变换算法相对简单、电机转子磁极的位置易于检测,因此交流调速的矢量控制理论在永磁同步电动机的控制领域也得到了同样的重视,有关永磁同步电动机矢量控制研究的成果陆续发表。
本文就是应用电压矢量控制SVPWM实现对永磁同步电机的转矩控制,使其拥有直流电机的性能。
关键词:永磁同步电机矢量控制 dq变换 DSP目录1 绪论............................................................................................................. (1)1.1 研究背景与意义 (1)1.2 研究现状及应用前景 (1)2 永磁同步电机的矢量控制方法 (3)3 硬件电路设计 (4)3.1 电流检测电路 (4)3.2 转速检测和转子磁极位置检测电路 (5)3.3 PWM发生电路 (6)3.4 IPM智能功率模块驱动电路 (7)3.5 系统保护电路 (8)3.6 人机接口电路 (9)4 软件设计............................................................................................................. . (9)设计心得............................................................................................................. .. (12)参考文献............................................................................................................. .. (13)1 绪论1.1 研究背景与意义众所周知,电动机是以磁场为媒介进行机械能和电能相互转换的电磁装置。
同步电机调速方法同步电机是一种常用的电动机,其调速方法有很多种,其中较为常见的是电压调制调速法、频率调制调速法和直流调速法。
电压调制调速法是通过改变同步电机的电压大小来实现调速的方法。
当需要提高转速时,可以增加电压大小,反之亦然。
此法的优点是调速范围广,但缺点是容易产生电压波动和噪声。
频率调制调速法是通过改变同步电机电源的频率来实现调速的方法。
当需要提高转速时,可以增加频率大小,反之亦然。
此法的优点是调速平稳,但缺点是调速范围较窄。
直流调速法是通过在同步电机的转子上加装直流电枢,通过改变直流电压大小来实现调速的方法。
此法的优点是调速平稳,调速精度高,但缺点是需要加装直流电枢,成本较高。
在实际应用中,根据不同的需求和场合选择不同的调速方法。
例如,电压调制调速法适用于工作负载变化较大的场合,频率调制调速法适用于工作负载变化较小的场合,而直流调速法适用于需要高精度调速的场合。
在使用同步电机调速时,还需要注意以下几点:1. 控制系统的合理设计。
调速系统需要根据具体的场合和需求,设计出合理的控制方案,确保调速效果和稳定性。
2. 调速器的选择。
调速器需要具备良好的性能和稳定性,能够适应不同场合和需求的调速要求。
3. 转子平衡。
同步电机的转子需要进行平衡处理,以保证调速时的稳定性和安全性。
4. 维护保养。
定期对同步电机进行检查和维护保养,及时发现和解决问题,确保调速系统的正常运行。
同步电机调速方法有多种,需要根据具体的场合和需求选择合适的方法。
在使用调速系统时,还需要注意控制系统的合理设计、调速器的选择、转子平衡和维护保养等方面,以保证调速系统的正常运行和安全性。
变频调速永磁同步电动机的设计随着科技的不断发展,变频调速技术日益成为工业领域中重要的节能技术之一。
变频调速技术通过改变电源频率,实现对电动机的速度控制。
在众多类型的电动机中,永磁同步电动机因其高效、节能、高精度控制等优点,逐渐得到广泛应用。
本文将探讨变频调速永磁同步电动机的设计方法。
变频调速技术主要通过改变电源频率来改变电动机的转速。
根据异步电动机的转速公式 n=f(1-s)/p,其中n为转速,f为电源频率,s为转差率,p为极对数,可知当f改变时,n也会相应改变。
变频调速技术具有调速范围广、精度高、节能等优点,被广泛应用于各种工业领域。
永磁同步电动机是一种利用永磁体产生磁场的高效电动机。
其特点如下:效率高:永磁同步电动机的磁场由永磁体产生,可降低铁损和额定负载下的铜损,从而提高效率。
节能:由于其高效率,永磁同步电动机在长期运行中可节省大量能源。
调速性能好:永磁同步电动机的转速与电源频率成正比,因此可通过变频调速技术实现对电动机的速度精确控制。
维护成本低:永磁同步电动机结构简单,故障率低,维护成本相对较低。
变频调速永磁同步电动机的设计原则是在满足额定负载要求的前提下,尽可能提高电动机效率,同时确保调速性能优越。
为此,设计时需考虑以下几个方面:(1)优化电磁设计:通过合理选择永磁体的尺寸和位置,以及优化定子绕组的设计,降低铁损和铜损。
(2)转子结构设计:保证转子的强度和稳定性,同时考虑散热问题,防止因转子故障导致电动机损坏。
(3)控制系统设计:选择合适的控制算法和硬件设施,实现对电动机速度的精确控制。
(1)明确设计需求:根据应用场景和负载要求,确定电动机的功率、转速、电压、电流等参数。
(2)选择合适的永磁材料:根据需求和市场供应情况,选择合适的永磁材料,如钕铁硼等。
(3)设计定子结构:根据电磁负荷要求,设计定子的槽数、绕组形式等结构参数。
(4)优化转子设计:根据强度和稳定性要求,设计转子的结构形式,选择合适的材料和加工工艺。
交流同步电机调速方法一、引言同步电机是一种特殊的电机,其转速与电源频率成正比。
然而,在实际应用中,我们经常需要对同步电机的转速进行调节。
本文将介绍几种常见的交流同步电机调速方法。
二、电压调制调速法电压调制调速法是通过改变同步电机的供电电压来实现调速的。
具体而言,可以通过调节变压器的输出电压大小,改变同步电机的磁通量,从而改变电机的转速。
这种方法简单易行,但对电网负荷变化较为敏感,且调速范围较窄。
三、电势环调速法电势环调速法是通过在同步电机的励磁回路中加入一个电势环来实现调速的。
电势环根据转速误差产生控制信号,通过调节励磁电流来改变同步电机的转速。
这种方法具有良好的稳定性和动态性能,但需要较复杂的控制系统。
四、电流环调速法电流环调速法是通过在同步电机的定子回路中加入一个电流环来实现调速的。
电流环测量电机的电流,根据转速误差产生控制信号,通过调节定子电流来改变同步电机的转速。
这种方法对负载变化较为敏感,但调速范围较宽。
五、电压-频率调速法电压-频率调速法是通过同时改变同步电机的供电电压和频率来实现调速的。
具体而言,可以通过调节变压器的输出电压和变频器的输出频率,改变同步电机的磁通量和转速。
这种方法调速范围较宽,但需要较复杂的控制系统。
六、矢量控制调速法矢量控制调速法是通过测量同步电机的转子位置和速度,实时计算电机的磁场矢量,从而控制电机的转速。
这种方法具有较高的精度和响应速度,但需要较复杂的传感器和计算算法。
七、总结以上介绍了几种常见的交流同步电机调速方法,它们各自具有不同的特点和适用范围。
在实际应用中,我们可以根据具体需求选择合适的调速方法。
同时,需要注意调速系统的稳定性、可靠性和安全性,确保同步电机能够稳定、精确地工作。
永磁同步电机的调速控制研究与探讨摘要:永磁同步电机相对于其它电机而言有着优异的性能,能够在石油、煤矿、大型工程机械等比较恶劣的工作环境下运行,这不仅加速了永磁同步电机取代其它电机的速度,同时也为永磁同步电机的发展提供了广阔的空间。
目前,永磁同步电机(PMSM)以其高功率密度、高性价比等独特优点受到国内外的普遍重视,因此,对永磁同步电机的调速控制研究具有非常重要的意义。
论文首先介绍了永磁同步电机的各种控制策略,接着分析了永磁同步电机的结构及其特点。
然后从矢量控制理论出发,重点分析了永磁同步电机的数学模型,并在此基础上,探讨了空间电压矢量控制方法。
关键词:调速控制系统;空间矢量控制;永磁同步电机1永磁同步电机的结构及其特点1.1永磁同步电机概述永磁同步电机的转子采用高性能的稀土永磁材料,使得电机尺寸减小;由于发热主体在定子侧,散热也比较容易;同时,其结构简单、效率和功率因素高及输出转矩大等特点,这些优点使得永磁同步交流伺服系统已成为现代伺服系统的主流,在很多驱动领域己经取代直流电机。
1.2永磁同步电机的结构永磁同步电机是用装有永磁体的转子取代绕线式同步电动机转子中的励磁绕组,从而省去了励磁线圈、滑环和电刷以电子换向器,实现无刷运行。
PMSM 的定子与绕线式同步电动机基本相同,要求输入定子的电流仍然是三相正弦的,所以称为三相永磁同步电机。
永磁同步电机的定子是电枢绕组,转子是永磁体。
就整体结构而言,永磁同步电机可以分为内转子和外转子式;就磁场方向来说,有径向和轴向磁场之分;就定子的结构而论,有分布绕组和集中绕组以及定子有槽和无槽的区别。
1.3永磁同步电机的特点虽然永磁同步电动机转子结构差别较大,但由于永磁材料的使用,永磁同步电机具有如下共同的特点:(1)、体积小、质量轻。
(2)、功率因数高、效率高,节约能源。
(3)、磁通密度高、动态响应快。
(4)、可靠性高。
(5)、具有严格的转速同步性和比较宽的调速范围。