第二部分 CAN总线使用说明
- 格式:doc
- 大小:1.96 MB
- 文档页数:15
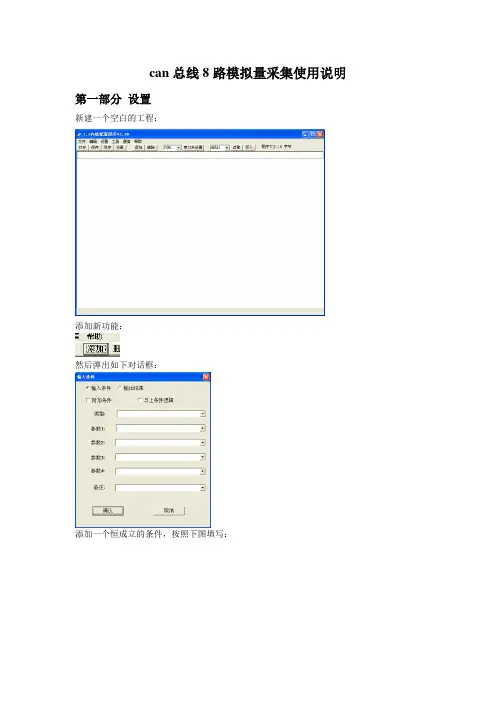
can总线8路模拟量采集使用说明第一部分设置新建一个空白的工程:添加新功能:然后弹出如下对话框:添加一个恒成立的条件,按照下图填写:确定:再添加输出,将内部变量赋值为模拟量的值:然后点击输出结果,按照下图填写:确定:依次将第2-8个内部变量赋值为2-8路模拟量(也可以使用菜单里面的复制粘贴功能然后修改,方便编辑):确定添加完毕的程序界面如下:上图程序的含义:“定时器大于等于0 ”这个条件是恒成立的,所以模拟量的值会一直赋值给内部变量。
然后点击按钮,将编辑好的程序写入到模块(请确保串口为打开状态)。
第二部分读取读取内部变量的功能码为0x70 ,根据通讯协议使用调试助手向总线发送16进制数据来读取发送:55 01 70 00 00 00 XX HH数据头模块地址功能码序号校验和返回:22 01 70 XX XX XX XX HH数据头模块地址功能码内部变量的值序号校验和举例说明:读取地址1第1路模拟量的值(即读取内部变量1的值):发送:55 01 70 00 00 00 01 C7返回:22 01 70 00 03 51 01 E8说明:03 51代表内部变量1的值,在这里也就是模拟量1的值,转换为10进制数据是849,在模拟量中100代表1V,这里读到的数据为8.49V读取地址1第5路模拟量的值(即读取内部变量5的值):发送:55 01 70 00 00 00 05 CB返回:22 01 70 00 02 2B 05 C5说明:02 2B代表内部变量5的值,在这里也就是模拟量5的值,转换为10进制数据是555,也就是读到的模拟量值为5.55V。
1
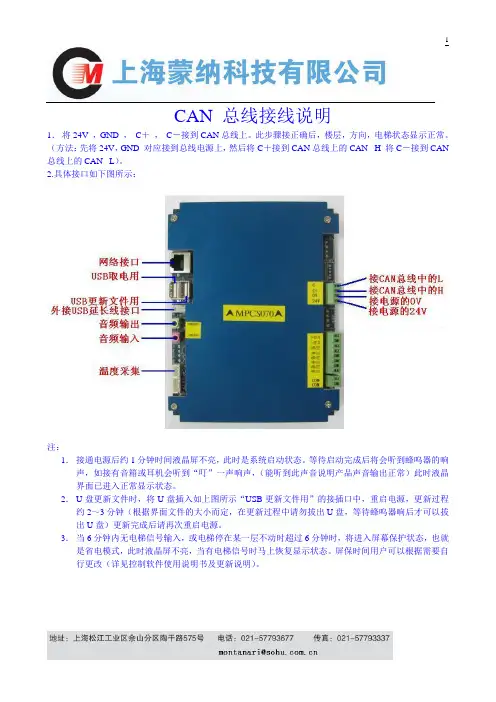
CAN 总线接线说明
1.将24V ,GND ,C+,C-接到CAN总线上。
此步骤接正确后,楼层,方向,电梯状态显示正常。
(方法:先将24V,GND 对应接到总线电源上,然后将C+接到CAN总线上的CAN _H 将C-接到CAN 总线上的CAN _L)。
2.具体接口如下图所示:
注:
1.接通电源后约1分钟时间液晶屏不亮,此时是系统启动状态。
等待启动完成后将会听到蜂呜器的响声,如接有音箱或耳机会听到“叮”一声响声,(能听到此声音说明产品声音输出正常)此时液晶界面已进入正常显示状态。
2.U盘更新文件时,将U盘插入如上图所示“USB更新文件用”的接插口中,重启电源,更新过程约2~3分钟(根据界面文件的大小而定,在更新过程中请勿拔出U盘,等待蜂呜器响后才可以拔出U盘)更新完成后请再次重启电源。
3.当6分钟内无电梯信号输入,或电梯停在某一层不动时超过6分钟时,将进入屏幕保护状态,也就是省电模式,此时液晶屏不亮,当有电梯信号时马上恢复显示状态。
屏保时间用户可以根据需要自行更改(详见控制软件使用说明书及更新说明)。
CAN总线的原理及使用教程一、CAN总线的原理1.数据链路层:CAN总线采用的是二进制多播通信方式,即发送方和接收方之间没有直接的连接关系,所有节点共享同一个总线。
在一个CAN总线系统中,每个节点都可以发送和接收信息。
当一个节点发送消息时,所有其他节点都能接收到该消息。
2.帧格式:CAN总线使用的是基于帧的通信方式,每个消息都被封装在一个CAN帧中。
帧由起始标志、ID、数据长度码、数据和校验字段组成。
其中,ID是唯一标识符,用来区分不同消息的发送者和接收者。
数据长度码指示了消息中数据的长度。
校验字段用于检测数据的完整性。
3. 传输速率:CAN总线的传输速率可根据需求进行配置,通常可选的速率有1Mbps、500Kbps、250Kbps等。
高速传输速率适用于对实时性要求较高的应用,而低速传输速率适用于对实时性要求不高的应用。
4.错误检测:CAN总线具有强大的错误检测能力,能够自动检测和纠正错误。
它采用了循环冗余校验(CRC)算法,通过对数据进行校验,确保数据的完整性。
如果数据传输过程中发生错误,接收方能够检测到错误,并通过重新请求发送来纠正错误。
二、CAN总线的使用教程1. 硬件连接:在使用CAN总线之前,需要先进行硬件连接。
将所有节点的CANH和CANL引脚连接到同一个总线上,并通过双终端电阻将CANH和CANL引脚与Vcc和地连接。
确保所有节点的通信速率和电气特性相匹配。
2.软件设置:使用相应的软件工具对CAN总线进行配置。
根据具体需求,设置通信速率、总线负载、数据帧格式等参数。
还需要为每个节点分配唯一的ID,用于区分发送者和接收者。
3.数据传输:使用软件工具编写代码,实现消息的发送和接收。
发送消息时,需要指定ID、数据长度和数据内容。
接收消息时,需要监听总线上的消息,并根据ID判断是否为自己需要的消息。
通过合理的逻辑处理,实现节点之间的数据交换和通信。
4.错误处理:CAN总线在数据传输过程中可能会发生错误,如位错误、帧错误等。
can总线第二章can总线系统原理CAN总线是一种串行通信总线,广泛应用于汽车电子系统、工业自动化和航空航天等领域。
CAN总线的设计目标是提供高可靠性、实时性和可扩展性的通信解决方案。
本文将详细介绍CAN总线的系统原理。
CAN总线系统由以下几个主要组成部分构成:CAN控制器、CAN收发器、CAN总线和节点。
CAN控制器负责管理和控制通信过程,而CAN收发器则负责将控制器发送的数字信号转换为电压信号,并将接收到的电压信号转换为数字信号。
CAN总线是连接各个节点的物理介质,节点则是CAN 总线上的设备或系统。
CAN总线采用差分信号传输,即通过两条线分别传输正负两个信号。
这种差分传输方式可以减小干扰对信号的影响,提高通信的可靠性。
CAN 总线使用非归零码(NRZ)编码方式,即不使用0和1两种信号电平来表示数据,而是使用高低电平的变化表示数据位的变化。
CAN总线采用了CSMA/CD(载波监听多路访问/冲突检测)的工作方式。
在CAN总线上,每个节点都可以发送和接收数据。
当一个节点要发送数据时,它首先监听总线上是否有其他节点正在发送数据。
如果没有冲突,则该节点发送数据;如果发现冲突,则停止发送数据,并等待一个随机的时间后再次尝试发送。
CAN总线支持广播和点对点通信。
广播是指一个节点向所有其他节点发送相同的数据,而点对点通信是指一个节点向另一个节点发送特定的数据。
广播通信可以实现消息的快速传播,而点对点通信可以实现节点之间的私密通信。
CAN总线提供了多种帧类型,包括数据帧、远程帧和错误帧。
数据帧用于传输实际的数据,远程帧用于请求其他节点发送数据,而错误帧用于传输错误信息。
每个帧都包含标识符、控制位、数据和校验字段。
标识符用于唯一标识每个帧,控制位用于指示帧的类型,数据字段用于存储实际的数据,而校验字段用于检测数据传输过程中是否发生错误。
CAN总线具有很高的实时性和可靠性。
它支持多个节点同时发送和接收数据,并且可以在微秒级的时间内完成数据传输。
CAN驱动数据总线CAN舒适/Infotainment数据总线自学手册 269Service.CAN-数据总线上的数据交换 II2应以实物为准。
手册。
• SSP 238:讲述CAN数据总线系统的基本功能。
• SSP 269:讲述大众和奥迪车上使用的CAN驱动数据总线和舒适/ Infotainment总线,特别要讲述如何使用VAS5051来进行故障查寻,最后要结合实际来说明如何进行故障诊断。
238_001车上使用不同的CAN数据总线以及在不同的网络中普遍使用数据信号,对诊断和故障查寻就提出了新的要求。
自学手册SSP238中讲述了CAN数据总线的基本原理;而自学手册SSP269则讲述如何在技术上来实现两种数据总线的使用。
本自学手册将讲述故障查寻的基本原理,在流程图中会说明系统故障查寻的方法。
本手册的最后将结合实际来详细讨论故障的状态,还将说明故障的诊断、原因和排除的方法。
3目录引言............................................4概述.............................................6特点..........................................6不同的数据传递................................8信号电平和电阻...............................12系统示意图..........................................14CAN驱动数据总线..............................14CAN舒适/Infotainment数据总线.................16总系统.........................................20售后服务中的CAN...............................22概述.........................................22CAN驱动数据总线.............................28CAN舒适/Infotainment数据总线................40考考你..........................................54名词解释.......................................584CAN数据总线工作起来是非常可靠的,因此很少出现CAN故障。
CAN总线教程详解CAN总线是一种现代的、高性能的通信总线技术,被广泛应用于汽车电子、工业控制、航空航天等领域。
CAN总线具有高可靠性、高带宽、低延迟等优点,能够满足实时性要求较高的应用场景。
本文将对CAN总线的基本原理、通信方式、物理层、协议以及应用进行详细介绍。
首先是CAN总线的基本原理。
CAN(Controller Area Network)总线是一种串行通信总线,其基本原理是利用差分信号传输数据,实现多个节点之间的通信。
CAN总线采用一种分布式的控制方式,多个节点可以同时进行发送和接收数据,而不会造成冲突。
此外,CAN总线还采用了一种优先级的机制,更高优先级的节点可以中断低优先级节点的传输,从而实现数据的有序传输。
接下来是CAN总线的通信方式。
CAN总线支持两种通信方式:广播和点对点。
在广播方式中,一个节点发送的数据可以被其他所有节点接收,而在点对点方式中,数据只能被指定的接收节点接收。
广播方式适用于需要向所有节点发送相同的数据的应用场景,而点对点方式适用于需要向指定节点发送数据的场景。
然后是CAN总线的物理层。
CAN总线的物理层采用了差分信号传输,即通过两根线分别传输正负两个相位相反的信号。
这种差分传输方式具有抗噪声能力强、抗干扰性好等优点。
CAN总线采用了标准的线缆以及连接器,可以实现节点间的高速可靠通信。
此外,CAN总线还具有自动的错误检测和纠正机制,能够实时检测线路的故障情况。
接下来是CAN总线的协议。
CAN总线采用了一种先进的帧格式,用于定义数据的传输规则。
每一帧包括了数据、标志位、ID等字段,多个帧组成了一个消息。
CAN总线使用了基于标识符的帧过滤机制,能够实现高效的消息传输。
此外,CAN总线还支持远程帧,即节点可以向其他节点发送请求,请求其发送指定的数据。
最后是CAN总线的应用。
CAN总线被广泛应用于汽车电子领域,用于汽车内部各个控制单元之间的通信。
例如,发动机控制单元、制动系统控制单元、仪表盘控制单元等可以通过CAN总线进行数据交互。
CAN总线的使用CAN(Controller Area Network)总线是一种多主机、多线程、分散控制系统中常用的实时通信协议,被广泛应用于车载电子、工业自动化、航空航天等领域。
本文将从CAN总线的基本原理、应用场景、使用方法等方面进行介绍。
一、CAN总线的基本原理CAN总线是由以位为基本单元的串行通信协议,其通信原理可以简单概括为:数据发送方通过CAN控制器将数据转换成一系列的数据帧,并通过CAN总线发送给接收方;接收方的CAN控制器接收到数据帧后,将其还原成原始数据。
CAN总线采用了CSMA/CR(Carrier Sense Multiple Access with Collision Resolution)的数据传输方式,即对总线中数据帧的冲突进行检测和解决。
二、CAN总线的应用场景1.车载电子系统中,CAN总线常用于汽车中的各种电子控制单元(ECU)之间的通信。
例如,引擎控制单元(ECU)、刹车控制单元(ECU)、空调控制单元(ECU)等通过CAN总线进行实时的数据交换和协调。
2.工业自动化领域中,CAN总线广泛应用于工业机器人的控制、传感器的数据采集与通信等方面。
CAN总线在工业环境中的抗干扰能力较强,可以满足高噪声环境下的可靠通信要求。
3.航空航天领域中,CAN总线可用于飞机电子设备之间的数据通信,如航空仪表、飞行控制系统、通信导航系统等。
三、CAN总线的使用方法1.硬件部分:(1)CAN总线连接:CAN总线通常使用双绞线进行连接,其中一根线为CAN High(CAN_H),另一根线为CAN Low(CAN_L)。
CAN_H和CAN_L通过终端电阻连接至VCC和GND,即电压分配电阻(VCC上的120欧姆电阻和GND上的120欧姆电阻)。
(2)CAN控制器选择:需要选择适合应用需求的CAN总线控制器。
(3)CAN总线的连接节点:将需要通信的CAN节点连接至CAN总线上,通常通过CAN收发器进行连接。
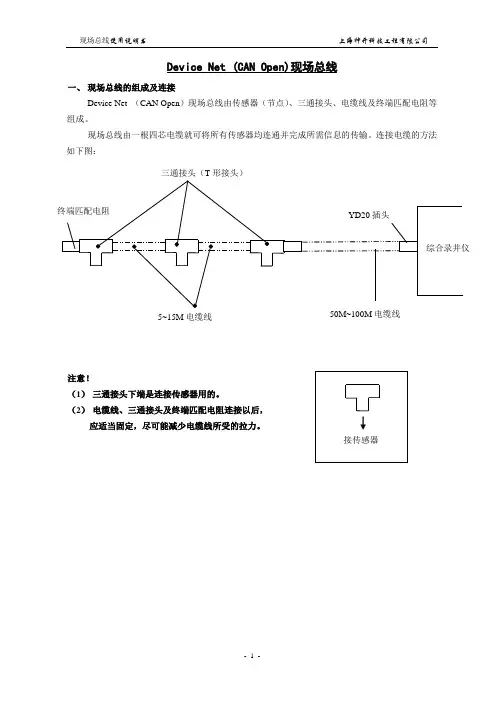
Device Net (CAN Open)现场总线一、 现场总线的组成及连接Device Net (CAN Open )现场总线由传感器(节点)、三通接头、电缆线及终端匹配电阻等组成。
现场总线由一根四芯电缆就可将所有传感器均连通并完成所需信息的传输。
连接电缆的方法如下图:注意!(1) 三通接头下端是连接传感器用的。
(2) 电缆线、三通接头及终端匹配电阻连接以后, 应适当固定,尽可能减少电缆线所受的拉力。
三通接头(T 形接头)5~15M 电缆线二、Device Net(CAN Open)总线型传感器1.SK-8J04和SK-9N01组成总线型绞车传感器,SK-9N01是CAN总线绞车隔离栅,其接线端子如下图:2.SK-8B06F和SK-9N02组成总线型泵冲传感器,SK-9N02 CAN总线泵冲隔离栅,其接线端子如下图:3.SK-9N03,各类4~20mA模拟量传感器配上SK-9N03后即组成相应的总线型传感器,SK-9N03是CAN总线,4~20mA模拟量输入隔离栅,其接线端子如下图:三.CAN适配卡CAN适配卡插计算机PCI总线上。
CAN适配卡上有二个CAN口,每个CAN上最多可连接64个节点,总线长度不超过500米,通讯速率设定在125Kbps。
一般使用适配卡上面一个CAN口。
适配卡每个CAN口上均设有125Ω的电阻。
CAN信号通过DB9(针形插座)输出,其引脚定义为:DB9-2 CAN-LDB9-5 CAN ShieldDB7-7 CAN—H四、CAN总线电源使用24V开关电源,开关电源安装在计算机箱内。
24V电源通过YD20K5Z插座(安装在计算机后面板上)向CAN总线供电,其引脚定义为:YD20K5Z —2 +24V—3 0V—5 CAN—L—1 CAN Shield—4 CAN—H五、CAN0V(黑色)+24V(红色)CAN Shield(屏蔽线)现场总线使用说明书上海神开科技工程有限公司- 6 -六、CAN系统接线表1.CAN节点防爆接线盒接线按防爆盒背面铭牌上的标识进行连接。
CAN总线的原理及使用教程CAN总线的基本原理是基于广播通信和多主机通信机制。
多个节点可以同时发送和接收消息,消息被广播到所有其他节点,每个节点根据消息中包含的标识符来判断该消息是否与自己相关。
如果消息与节点相关,节点将处理该消息;如果消息与节点不相关,节点将忽略该消息。
这种机制使得多个节点可以在同一个总线上同时进行通信,大大提高了总线的利用率。
CAN总线的传输速率通常为1Mbps或以上,并且支持长距离传输。
它采用差分信号线进行传输,其中CAN_H和CAN_L线分别携带正向和负向信号,通过比较CAN_H和CAN_L之间的电压差来判断数值。
差分信号线的使用可以有效地抑制电磁干扰和噪声,提高传输的可靠性。
在CAN总线中,每个节点都有一个唯一的标识符用于区分不同的节点。
当节点需要发送消息时,它会将消息封装成一个帧,包括标识符、数据和一些控制字段。
帧被发送到总线上,其他节点可以接收到该帧并进行相应的处理。
节点还可以发送错误帧来检测和纠正总线上的错误。
为了保证多个节点之间的通信顺序和优先级,CAN总线采用了基于优先级的仲裁机制。
当多个节点同时发送消息时,节点根据自己的标识符计算一个仲裁值,仲裁值越小的节点具有较高的优先级,可以发送消息。
其他节点将立即停止发送,并等待仲裁完成后再发送。
这种仲裁机制保证了消息的有序发送,避免了冲突。
除了基本的消息传输外,CAN总线还支持远程帧和错误帧等功能。
远程帧用于请求其他节点发送指定标识符的消息,而错误帧用于报告总线上的错误情况。
这些功能使得CAN总线更加灵活和可靠。
在使用CAN总线时,首先需要选取合适的硬件设备和控制器。
接下来,需要进行总线的布线和连接,保证差分信号线的正确连接和屏蔽的使用。
然后,需要编写相应的软件程序来控制节点的行为,包括发送和接收消息、处理错误等。
最后,进行系统的调试和测试,确保CAN总线的正常工作。
总之,CAN总线是一种高性能的串行通信协议,具有多节点同时通信、高速传输、抗干扰能力强等优势。
CAN总线详细教程CAN总线是一种高速串行通信协议,广泛应用于自动化控制系统、汽车电子、工业设备等领域。
它具有高速传输、可靠性强和抗干扰能力强等优点。
本篇文章将介绍CAN总线的基本原理、通信方式、帧格式以及应用示例等内容。
一、CAN总线基本原理CAN(Controller Area Network)总线是一种多主机、多从机的通信系统,包括一个主控器和多个节点。
主控器负责决定总线上的通信速率和优先级,节点之间的通信通过总线上发送和接收的消息进行。
二、CAN总线通信方式1.基于广播的通信方式:主控器发送的消息会被总线上的所有节点接收。
节点根据消息的标识符判断是否需要对其进行处理。
2.基于点对点的通信方式:主控器发送的消息只会被消息的接收者节点接收。
消息的接收者是通过消息的标识符来确定的。
在实际应用中,一般会结合这两种通信方式来实现复杂的通信需求。
三、CAN总线帧格式1.数据帧:用于实际传输数据。
数据帧包括标识符、控制字段、数据字段和校验字段等。
2.远程帧:用于请求节点发送数据。
远程帧只包括标识符和控制字段。
标识符用于标识消息的类型和优先级,控制字段用于进行错误检测和数据传输的控制。
数据字段包含要传输的数据,校验字段用于检测数据传输过程中是否出现错误。
四、CAN总线应用示例以汽车电子控制系统为例,介绍CAN总线的应用。
在汽车上,CAN总线被广泛应用于发动机控制、刹车系统、空调系统等各种电子控制单元之间的通信。
通过CAN总线,这些电子控制单元可以实现信息的共享和协同工作。
例如,发动机控制单元可以将发动机的运行状态通过CAN总线发送给其他控制单元,供其他控制单元进行相应的控制。
刹车系统可以通过CAN总线获取发动机控制单元的信息,判断是否需要进行制动操作。
空调系统可以根据发动机控制单元的信息,调整空调的工作状态等。
总结:CAN总线是一种高速串行通信协议,具有高可靠性和抗干扰能力强的特点。
它采用差分传输技术,实现多主机、多从机的通信。
CAN总线的使用CAN总线的使用1、硬件连接方式硬件电路如下图所示:图中,D1(IL712)是磁隔离器件,其作用为了使各下井仪之间实现电气隔离。
各下井仪需要为D1提供两组+5V电源,图中标为VCC1和VCC2。
其中,VCC1为仪器内部数字电源,提供给单片机C8051F041和其它数字电路;VCC2是隔离电源,用于给IL712和TJA1050供电,电源电流应大于75mA。
C1、C2为两组电源的滤波电容。
D1的2脚与C8051F041(图中未画)的7脚(CANTX)直接连接,D1的3脚与C8051F041的6脚(CANRX)直接连接。
D2(TJA1050)为CAN总线收发器,该器件应用VCC2供电。
C3为该器件的滤波电容。
D2的输出CANH(6脚)、CANL(7脚)直接连接到下井仪的总线上。
R1、R2、C4为CAN总线终端匹配电阻的接法,这三个器件只需要在处在下井仪串上下两端的仪器中需要。
即:在某仪器中,如果CAN总线是贯通线,则不能连接这三个器件,反之,如果在该仪器中,如果CAN总线不是贯通线,则需要连接这三个器件。
输出的CANH和CANL应双绞。
2、软件使用方法编程者应该熟悉以下两本资料:《C8051F040/1/2/3/4/5/6/7混合信号ISP FLASH微控制器数据手册》《Bosch’s C_CAN User’s Manual》在下井仪中建议采用C8051F041或C8051F040单片机,该单片机内部集成了Bosch CAN控制器。
以下简要介绍C8051F04x单片机和Bosch CAN控制器及其软件编程方法。
2.1 C8041F04x单片机SFR的分页机制C8051F04x系列MCU对CIP-51内核和外设有几项关键性的改进,提高了整体性能。
其中与编程密切相关的一点是使用了SFR(特殊功能寄存器)分页机制,允许器件将很多SFR映射到0X80~0XFF这个存储器空间。
C8051F04x器件使用了5个SFR页:0、1、2、3和F。
Device Net (CAN Open)现场总线一、 现场总线的组成及连接Device Net (CAN Open )现场总线由传感器(节点)、三通接头、电缆线及终端匹配电阻等组成。
现场总线由一根四芯电缆就可将所有传感器均连通并完成所需信息的传输。
连接电缆的方法如下图:注意!(1) 三通接头下端是连接传感器用的。
(2) 电缆线、三通接头及终端匹配电阻连接以后, 应适当固定,尽可能减少电缆线所受的拉力。
三通接头(T 形接头)5~15M 电缆线二、Device Net(CAN Open)总线型传感器1.SK-8J04和SK-9N01组成总线型绞车传感器,SK-9N01是CAN总线绞车隔离栅,其接线端子如下图:2.SK-8B06F和SK-9N02组成总线型泵冲传感器,SK-9N02 CAN总线泵冲隔离栅,其接线端子如下图:3.SK-9N03,各类4~20mA模拟量传感器配上SK-9N03后即组成相应的总线型传感器,SK-9N03是CAN总线,4~20mA模拟量输入隔离栅,其接线端子如下图:三.CAN适配卡CAN适配卡插计算机PCI总线上。
CAN适配卡上有二个CAN口,每个CAN上最多可连接64个节点,总线长度不超过500米,通讯速率设定在125Kbps。
一般使用适配卡上面一个CAN口。
适配卡每个CAN口上均设有125Ω的电阻。
CAN信号通过DB9(针形插座)输出,其引脚定义为:DB9-2 CAN-LDB9-5 CAN ShieldDB7-7 CAN—H四、CAN总线电源使用24V开关电源,开关电源安装在计算机箱内。
24V电源通过YD20K5Z插座(安装在计算机后面板上)向CAN总线供电,其引脚定义为:YD20K5Z —2 +24V—3 0V—5 CAN—L—1 CAN Shield—4 CAN—H五、CAN0V(黑色)+24V(红色)CAN Shield(屏蔽线)现场总线使用说明书上海神开科技工程有限公司- 6 -六、CAN系统接线表1.CAN节点防爆接线盒接线按防爆盒背面铭牌上的标识进行连接。
2.CAN防爆盒至三通3.CAN总线至适配器4.100m主干电缆(CAN节点1至工控机)5.10m主干线(CAN节点至CAN节点)6. CAN终节点附: 进口针座及孔座接线端排列图孔座 针座七、CAN 总线仪器泵冲回零太慢调滤波时间的操作1,退出CAN 服务程序,只`接一个泵冲节点传感器。
2, 在盘符:\SK-SOFT1.40.4\DLS\PUMP STROKE TAO 目录下,运行5016bd 程序弹出 如下窗口:3,输入节点序列号 B########。
4,修改滤波时间TAO 一般为20-60之间,〈数值越大泵冲越稳定,但泵冲回零太慢〉5,按数据下载按钮,计算机显示成功后退出程序.八、CAN总线仪器绞车倒向程序使用的操作1.在盘符:\SK-SOFT1.40.4\DLS\DrawWork reverse的目录下,运行5016cs程序弹出如下窗口:2.输入MAC ID 节点序列号3.按读计数方向按钮,查看方向值是0或1,然后输入原读计数方向值相反的值。
4.按读计数值按钮,查看通信是否正常附一:SK-9N01CAN 节点 SK-9N02 保险丝更换说明书SK-9N03SK-9N01、SK-9N02和SK-9N03三型CAN 节点均含有安全隔离栅,满足铭牌标示的防爆要求,按国家强制标准要求,安全隔离栅更换保险丝均应返回设备提供厂,由专业人员进行。
凡使用本说明书对上述三型CAN 节点更换保险丝的用户,均被视作同意以下协议;否则应将本说明书连同附件、受损的CAN 节点一齐寄返神开公司修理。
协 议1、 凡使用本说明书的操作人员已经仔细阅读并充分理解本协议,已被进行过培训,达到修理人员的要求;2、 操作人员已取得焊接资格;3、 只使用本说明书指定的保险丝规格;4、 保证所更换的保险丝规格与所焊位置是正确的。
检查保险丝通断的具体方法一、 SK-9N01、9N02、9N03上印板保险丝检查方法:搜索不到某个节点时,可用以下提供的二种方法进行此项检查。
1、 卸下节点的5芯针形插座,直接在5芯针形插座上按下图进行检查。
5芯针形插座示意图熔丝F1、F2为可更换元件,它们的型号是:F1 WICKMANN370 125mA ;F2 WICKMANN370 160mAV+ V- CAN-H 屏蔽2、必要时使用专用工具打开节点盖子,直接在上印板上检查。
9N01/9N02/9N03上印板位置图熔丝F1、F2为可更换元件,它们的型号是:F1 WICKMANN370 125mAF2 WICKMANN370 160mA二、SK-9N01、9N02下印板保险线检查方法节点能被搜索到,而无传感器信号时,可进行此项检查,进行该项检查需由专门工具打开节点盖子。
9N01、9N02下印板位置图F1、F2为可更换元件,它们的型号是:F1、F2 WICKMANN 370 125mA三、SK-9N03下印板保险丝检查方法节点能被搜索到,而无传感器信号时,可进行此项检查,进行该项检查需由专门工具打开节点盖子。
9N03下印板位置图F1、F2为可更换元件,它们的型号是:F1、F2 WICKMANN 370 100mA附二:CAN总线型传感器系统使用要点神开科技工程有限公司率先将现场总线技术应用于综合录井仪及钻井仪表,产品已被油田用户接受。
但新生事物在带来众多优点的同时,也会伴随产生一些新问题。
为了使油田用户更好地掌握CAN总线型传感器系统的安装、使用、维护技巧,达到事半功倍的效果,特总结如下:一、总线通讯稳定性问题按CAN规范以125Kbps通讯速率,主干电缆长度可达到500m,接入的CAN节点可达到64只。
综合录井仪接入的CAN节点在23只左右,主干电缆长度在300m以下。
如果出现通讯不稳定现象(指某些节点时不时出现超时,或搜索节点时某些节点时有时无,甚至同一节点搜索到一次以上),一般应注意以下几点:1、是否正确配接了终端电阻终端电阻应有两个,其一接在主干电缆的末端三通上,另一个已焊接在CAN适配卡上。
终端电阻的作用是吸收信号线上电脉冲的多余能量,防止反射形成信号混淆,而信号混淆将导致通讯错误。
频繁的通讯错误,会导致CAN总线重置。
如此循环将使CAN总线根本无法正常通讯。
具体检查方法为:断开CAN总线与适配卡的连接,用VC9806型万用表200Ω档测量YD20的4、5脚,应在125Ω左右。
未接终端电阻,将导致通讯不稳定。
如正常,还应检查YD20五个芯脚之间是否互相绝缘(万用表2MΩ应溢出)。
2、主干电缆有无分支(即总线拓扑结构是否正确)CAN总线主干电缆应从头至尾为一根“直肠子”,不允许分支。
具体来讲,三通左右两端用于连接主干电缆,丁字端只能连接CAN节点,而不能接入主干电缆。
尤其在主干分支达到相当长度时,CAN总线必定出现通讯不稳定现象。
此时只能取消主干电缆分支。
正确的做法是:首先将三通接头布置在应安装的CAN节点附近,然后将主干电缆走线至各三通接头互连,而所有三通丁字端只用于连接CAN节点。
3、总线工作电压CAN规范规定总线工作电压为24V。
由于电流传输存在压降损失,当总线上某一CAN节点获得工作电压低于19V时,也会导致总线通讯不稳定的现象,此时可将向总线供电的开关电源输出电压调高,但不应超过26V。
4、主干电缆是否有螺丝松动,引起接触不良现象主干电缆的芯线与插头的连接是靠小螺丝固定的,如果某一根线螺丝未上紧,接触不良也会出现总线通讯超时或某一个传感器超时现象,此时通讯时好时坏,当出现某一个传感器超时现象时,应注意检查对应节点的插头,有无线头螺丝未上紧的现象,并排除故障。
二、总线接插件防护等级CAN总线接插件防护等级为IP65,能在水深1m条件下保持密封,接插件插拨可达10000次。
我公司质检部对CAN总线接插件进行了水淹及蒸汽薰蒸试验,均未发现泄漏。
实际使用发现密封不好,分析原因认为是现场总线未固定,而在频繁移动造成的。
井场油污、泥沙等脏物进入接插件密封部位,将导致接插件防护等级下降。
对此在保证电气连接正常的情况下,建议将三通等接插件用防水材料包裹好。
大庆油田在井架护棚通有蒸汽的情况下,采用自粘胶带包好三通,收到了良好的防水效果。
但仍应注意包扎前接头应是干燥的。
三、CAN节点保险丝问题神开公司提供的CAN节点符合防爆要求。
为满足防爆强制规定,节点内装有三个快速熔断保险丝,其规格不得任意变更。
不能靠增大保险丝电流规格来追求不烧保险丝,而无视可能引起的危险气体的爆燃事故。
由于自复保险丝等效参数不满足CAN通讯要求,也无法应用于CAN节点中。
在能妥善解决此问题的新技术出现之前,建议用户注意以下几点:1、每次架设CAN总线传感器系统之后,向CAN总线送电之前,首先检查总线上绝缘情况,正常后才送电。
2、尽量避免带电情况下更换CAN节点。
无法避免时,应特别注意将接插件定位槽对齐后再插入。
这样可避免引脚错误情况下强行插入所引起的浪涌电流熔断保险丝。
3、CAN节点盒盖不得随意打开,针对此项维修操作的需要,神开公司应用户要求而提供特别服务。
4、接插件未连接之前,应加以小心保护,避免粘上泥浆、雨水之类导电液体。
已经粘上泥浆、雨水时,可用清水洗干净烘干。
5、四、三通连接的注意事项1、井场传感器比较集中的地方,通常会出现几只三通连用。
由于三通外壳为软性塑料,如果连接超过三只,总线又未固定好,可能造成三通内插针接触不良或骁断。
因此,建议用户在使用时,相互连接的三通(中间无总线)不超过三只。
2、为了防止传感器接头进水、泥浆或其他污染物,在安装或更换时,需用厂方提供的保护套对其进行保护。
五、关于CAN总线隔离栅型号的说明目前我们使用的防爆隔离栅共分三种,请在使用时注意区分:1、SK-9N01CAN总线绞车隔离栅,俗称C型节点,用于绞车传感器;2、SK-9N02CAN总线泵冲隔离栅,俗称B型节点,用于泵冲、转盘转速传感器;3、SK-9N03CAN总线模入量隔离栅,俗称A型节点,用于所有4-20mA输出信号传感器;A型节点又分为二线制和三线制二种,出厂时在防爆隔离栅外壳不锈钢标牌上有所标识,三线制A 节点仅用于SK-8N07电扭矩传感器,SP1102总烃检测传感器和H2S传感器(格林通),其余均为二线制。
值得注意的是,安路、雪格产H2S传感器为二线制。