SEW-DRC-DFE33B-UOH11B-EtherNet IP总线系统调试方法和技巧(详解版)
- 格式:pdf
- 大小:1.29 MB
- 文档页数:19

②Profinet IO网卡:DFE32B ③异步电机…DRE(N)(S)12系统架构:DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动34驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;PLCDRE(N)(S)异步电机硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚PLCDRE(N)(S)异步电机将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:6在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
ENABLE/RAP.STOP端子功能:当ENABLE/RAP.STOP端子置为1时,电机即进入接受总线指令状态;当ENABLE/RAP.STOP端子置为0时,电机处于无控制状态;在电机运行时,将ENABLE/RAP.STOP端子置为0,电机会按参数136设定的值快速停下来,然后处于无控制状态;:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Fieldbus;(总线控制)101→设为Fieldbus;(总线控制)130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)301 →设为60rpm;(输出最小转速)(保证全力矩转速!防止升降驱动坠落);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为Enable/stop;(输出使能)601 →设为No function;602 →设为No function;603 →设为No function;604 →设为No function;700 →设为VFC;(矢量速度控制模式)7731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)831 →设为Rapid stop/fault(总线故障时立即停止输出,持续报警,等待复位信号) 870 →设为Control word 1;(总线PO1定义,控制启动,停止)871 →设为Setpoint speed;(总线PO2定义,发送运行的速度)872 →设为Ramp;(总线PO3定义,发送运行的加减速斜坡)873 →设为Status word 1;(总线PI1定义,反馈驱动器状态;报警信息)874 →设为Actual speed;(总线PI2定义,反馈当前运行的速度)875 →设为Output current;(总线PI3定义,反馈当前运行的电流)876 →设为Yes;(允许总线数据传输)PLC设定至变频器值PO1 : Control word 1 (控制字1)当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按136参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按131;133参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按136参数设定的减速斜率停止;即PO1发0当需要故障复位时,将第6位置为1即可;8如PO1对应QW256,直接赋值到QW256即可PO2 : Setpoint speed (设定速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: Ramp (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可9变频器反馈至PLC值PI1 : Status word 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第620-636页)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第609页)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : Actual speed (实际速度)10速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm 如PI2对应IW258,电机运行的速度,直接从IW258读值即可PI3 : Output current (输出电流)从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:一个MDX61B0040-5A3-4-00(4KW)控制一个3KW的电机PI反馈给PLC的值为01C2(16进制),换算为10进制为450从驱动器系统手册可查出MDX61B0040-5A3-4-00的额定输出电流为9.5A则电机实际运行的电流为9.5A * 450/1000 = 4.3A11电磁干扰屏蔽安装要求控制器至电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。

SEW变频器与ABPLC通过EthernetIP通讯控制第一步:根据电机的名牌设定电机参数,具体操作按下图步骤操作即可。
第二步:利用SEW变频器软件或AB的BOOTP-DHCP Server软件设定IP地址。
2 1
第三步:组态PLC,要用AB通用的以太网模块按下面的配置来组态。
我们现场测试过用SEW 官网的EDS文件通讯不上,后来用这个可以的。
第四步:利用变频器面板按钮手动启动停止,测试电机运转是否正常。
通过上下键选择到如下图指示灯亮,按下Enter确认,按下run键,调节旋钮给定速度,电机就可以转了。
第五步:配置变频器参数。
按下图红框中的参数进行配置。
第六步:通过PLC给出命令,启动停止变频器。
给定速度,斜坡,启动。
SEW变频器调试简单参考芜湖艾蔓设备工程有限公司伯雨晴1:变频器出厂时,X17端子上D1与D3,D2与D4已经短接好。
不需要改动。
如果没有短接,请将以上短接或者D1与D3间,D2与D4间接继电器常开触点,用以控制变频器是否停止。
注:短接时变频器处于可启动状态,断开时处于安全停止状态2:X13端子上,D1与D8短接,D7与D9短接,(必须),如果不短接,变频器显示控制器禁止。
短接完成后显示无使能。
3.X10端子上D9与D10外接24V电源(D9接+24V,D10接0V),用于提供变频器电子信号电源,既只要有此+24V接入,变频器即可调试参数4.X10端子上,D2与D3间接电机抱闸。
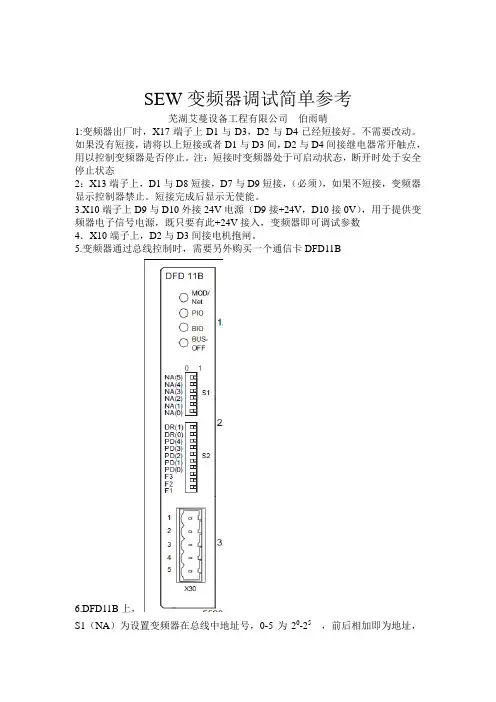
5.变频器通过总线控制时,需要另外购买一个通信卡DFD11B6.DFD11B上,S1(NA)为设置变频器在总线中地址号,0-5为20-25,前后相加即为地址,如20+21=3,那么这个变频器在总线中的地址为3#。
7. DFD11B上,S2 (DR)为设置变频器在总线中的传输频率,该频率设置必须与扫描模块上设置的频率一致,否则扫描模块将无法扫描到这个变频器。
DR0=0,DR1=0,125KBDR0=1, DR1=0,250KBDR0=0, DR1=1,500KBDR0=1, DR1=1,禁止8.DFD11B上,(PD0-4),设置与总线间传送的通道值。
计算方法与总线地址设置的计算方法相同。
此设置必须与扫描文件中下载到变频器的输入输出字节一致。
即如果在变频器拨码开关上设置4PD,那么在扫描文件里必须把该变频器的输入输出字节设置成8个字节(4×2)。
否则扫描模块将报警。
9. DFD11B上,AS,F1,F2,不做改动。
总线控制时:10.参数调试首先在操作面板上将参数初始化(如果点击轴上没有带编码器,则选择无编码器,不使用),完成后重新上电。
更改参数P100为device,P101为DEVICE。
将控制方式及控制源设成现场总线方式。


配置:…DRC.-0xx-DSC-A-ECR/BWProfinet IO 网关:DFE32B/UOH11B系统架构DevicenetProfinet IO一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台DRC上的的S1要拨到ON处,其它DRC上的的S1要拨到OFF处将网关的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4S2的第4为设为ON 具体使用拨码进行设定一个网关可带8台Movigear (从网关到最后一台变频器之间的SBUS 通讯线总长不要超过50米) 最后一台DRC 上终端电阻开关S1要拨到ON处,其它拨到OFF 处请将网关上的AS开关在断电时,拨到1处,上电后稳定后,将此开关拨到0,再拨回1,让网卡和变频器之间建立通讯设定参数8516.0 → 输出最小转速8517.0 → 输出最大转速8518.0 → 输出最大电流8304.0 → 设为10 / CTRL. WORD 2(总线PO1定义,控制启动;停止;故障复位)8305.0 → 设为1 / SPEED(总线PO2定义,设定速度)8306.0 → 设为8 / RAMP (总线PO3定义,加减速时间)8307.0 → 设为6 / STATUS WORD 1(总线PI1定义,反馈实际状态)8308.0 → 设为1 / SPEED(总线PI2定义,反馈实际转速)8309.0 → 设为2 / OUTP. CURRENT(总线PI3定义,反馈实际输出电流,为比例系数,需进行换算)8622.0 → 设为1 / YES(允许PO值发送)PLC与DFE32B/UOH11B的通讯连接,请看《SEW_MOVITRAC-B PROFINET IO总线接口DFE32B使用手册Edition2007.9》第38-43页PLC 设定至变频器值PO1 :CTRL. WORD 2当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按8476.0参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按8471.0;8473.0参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按8476.0参数设定的减速斜率停止;即PO1发0 当需要故障复位时,将第6位置为1即可;如PO1对应QW256,直接赋值到QW256即可PO2 : SPEED (速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可(加减速斜坡)PO3: RAMP加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可变频器反馈至PLC值PI1 : STATUS WORD 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW-DRC..DSC操作手册)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义请看SEW-DRC..DSC操作手册)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : SPEED (速度)速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm如PI2对应IW258,电机运行的速度,直接从IW258读值即可OUTP. CURRENT (输出电流)PI3 :从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:PI反馈给PLC的值为01C2(16进制),换算为10进制为450从下表可查出DRC2的额定输出电流为3.4A则电机实际运行的电流为3.4A * 450/1000 = 1.53A电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地。

1. 不上网,端子(模拟量)控制
使用示例:4个独立的变频器
变频器:MC07B0004-5A3-4-00 (1个)(0.37KW)
变频器:MC07B0075-5A3-4-00 (1个)(7.5KW)
变频器:MC07B0110-5A3-4-00 (1个)(11KW)
变频器:MC07B0150-503-4-00 (1个)(15KW)
共用件:操作面板FBG11B (1个)
电脑通讯盒USB11A + FSC11B(1个)
2. 工业网络控制
SEW-MC07B系列变频器是通过网关的形式与各种工业总线连接,用于Profinet网络的网关型号为:DFE32B/UOH11B
每个网关最多可带8个MC07B系列变频器(网关到变频器,及变频器之间的网线连接长度不超过50米),每个MC07B系列变频器必须带一个FSC11B通讯卡
使用示例:1个网关带3个变频器
Profinet IO网关:DFE32B/UOH11B (1个)
变频器:MC07B0030-5A3-4-00 (1个)(3KW)
通讯卡:FSC11B (1个)
变频器:MC07B0022-5A3-4-00 (1个)(2.2KW)
通讯卡:FSC11B (1个)
变频器:MC07B0008-5A3-4-00 (1个)(0.75KW)
通讯卡:FSC11B (1个)
共用件:操作面板FBG11B (1个)
电脑通讯盒USB11A(1个)。


欧姆龙和SEW伺服控制器EtherNet/IP通讯一.硬件部分1.欧姆龙CJ2M:自带EtherNet/IP通讯接口2.SEW伺服控制器:需搭配FieldBus Interface DFE33B EtherNet/IP and Modbus/TCP二.软件部分1.欧姆龙编程软件:CXONE2.SEW调试软件:MOVITOOLS MotionStudio3.EDS文件:SEW-MOVIDRIVE-DFE33B.eds (可在SEW光盘中搜索到)三.调试步骤1.使用CX-Programmer新建项目,并且完成硬件组态工作。
图一注:本文仅组态CJ2M-CPU31控制器,无IO模块。
2.在新建项目中“符号”中新建二个新符号,例如:a.名称:FromSEW01;数据类型:INT;地址或值:D100(数据区);网络变量:输入;高级设置:数组符号,数组大小10;b.名称:ToSEW01;数据类型:INT;地址或值:D200(数据区);网络变量:输出;高级设置:数组符号,数组大小10;图二注:红圈为新建通讯数据变量时需注意的地方。
图三注:图为建好的变量。
3.在CX-Programmer中将项目在线,在编程模式下下载程序。
4.打开“IO表和单元设置”,选择“内置端口/插入板”,设置欧姆龙PLC IP地址,然后点击“传送PC到单元”,如图。
图四注:PLC的模式应为“编程模式”,IP地址末尾会在PLC屏上显示。
5.打开CX-ONE软件组件中“Network Configurator”,在“EtherNet/IP Hardware”→Vendor →OMRON Corporation →Communication Adapter ,双击“CJ2M-EIP21”将模块添加到右侧网络视图中。
图五6.右键添加的图标,选择change node address,更改IP地址,需和PLC地址保持一致。
图六7.双击图标会弹出“Edit Device Parameters:192.168.0.10 CJ2M-EIP21”,点击Import,会自动上传刚刚在CX-progarmmer中建立的2个变量:FromSEW01,ToSEW01。

配置:MC07B… + FSC11BProfinet IO 网关:DFE32B/UOH11B系统架构L1L2L3PEDRE(N)(S)...异步电机1. 水平驱动2. 升降驱动硬件接线:水平驱动一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台MC07B上的FSC11B的S1要拨到ON处,其它MC07B 上的FSC11B的S1和S2要拨到OFF处硬件接线:升降驱动!! (建议:制动器采用快速制动,PLC保护制动)(防止控制制动器的单个接触器粘连等意外坠落)一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台MC07B上的FSC11B的S1要拨到ON处,其它MC07B 上的FSC11B的S1和S2要拨到OFF处.如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4USB11A + FSC11B和SEW - MOTION STUDIO软件设定电机参数和相应运行参数(详见SEW-MC07B变频器-MOTION STUDIO软件调试PPT)或使用键盘盒—FBG11B1.设定电机参数2. 设定运行参数①再按,显示;按键或键,到处,显示,按键,显示;②按键或键,直到显示,按键,选择能设定所有参数),按键确认,然后按退出;设定参数100 → 设为10 / SBus 1/fixed setpoint(总线控制)101 → 设为3 / SBus 1(总线控制)130 → 加速斜坡时间131 → 减速斜坡时间136 → 使能快停时间301 → 输出最小转速,水平驱动时:设为60rpm(保证全力矩转速)升降驱动时:设为90rpm(升降控制时,保证安全力矩转速)302 → 输出最大转速303 → 输出最大电流限幅500 → 过载保护,设为ON501 → 过载保护延迟时间,设为1s(当达到参数303设定值时的持续时间,根据实际情况调整)601 → 设为0 / No function(DI02定义为无功能)602 → 设为0 / No function(DI03定义为无功能)603 → 设为0 / No function(DI04定义为无功能)604 →设为0 / No function(DI05定义为无功能)700 →设为0/ VFC(矢量控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)870 → 设为9/ Control word 1(总线PO1定义,控制启动;停止;故障复位)871 → 设为1 / Setpoint speed(总线PO2定义,设定速度)872 → 设为8/ Ramp(总线PO3定义,加减速时间)873 → 设为6 / Status word 1(总线PI1定义,反馈实际状态)874 → 设为1 / Actual speed(总线PI2定义,反馈实际转速)875 → 设为2 / Output current(总线PI3定义,反馈实际输出电流,为比例系数,需进行换算)876 → Yes(允许PO值发送)881 → 内部网络的1号站设为1;2号站设为2;3号站设为3;……;8号站设为8883 →设为0.1s(网关内部子网络通讯故障报警时间)然后,将网关上的AS开关在断电时,拨到1处,上电后稳定后,将此开关拨到0,再拨回1,让网关和变频器之间建立通讯PLC设定至变频器值PO1 : Control word 1 (控制字1)当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按136参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按131;133参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按136参数设定的减速斜率停止;即PO1发0当需要故障复位时,将第6位置为1即可;如PO1对应QW256,直接赋值到QW256即可PO2 :Setpoint speed (设定速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: Ramp (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可变频器反馈至PLC值PI1 : Status word 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW_MOVITRAC-B 系统手册-英文版Edition2013.7第350-354页)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义SEW_MOVITRAC-B 系统手册-英文版Edition2013.7第341页)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : Actual speed (实际速度)速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm如PI2对应IW258,电机运行的速度,直接从IW258读值即可Output current (输出电流)PI3 :从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算示例:一个MC07B0015-5A3-4-00(1.5KW)控制一个1.1KW的电机PI反馈给PLC的值为01C2(16进制),换算为10进制为450从下表可查出MC07B0015-5A3-4-00的额定输出电流为4A则电机实际运行的电流为4A * 450/1000 = 1.8A如PI3对应IW260,电机运行的电流,直接从IW260读值即可MC07B0015-5A3-4-00(1.5KW)的额定输出电流I N为4A电磁干扰屏蔽安装要求变频器至电机的动力电缆最好采用带屏蔽层,屏蔽层从头至尾最好不应有断层,并用金属夹可靠紧固,大面积接地变频器为干扰源,通过到电机的连线,会产生电磁干扰。

③Profinet IO网卡:DFE32B ④同步伺服电机-带绝对值型编码器…CM…AS(K)1H12驱动应用场合:对于刚性连接系统,即电机编码器与物体实际运行的距离能始终保持相同比例的连接结构。
如1. 直连传动;2. 丝杆传动;3. 齿轮齿条传动;4. 同步带传动(同步带拉升量在允许范围内);5. 链条传动(链条拉升量在允许范围内)地轨L1L2L3PE系统架构:3L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)45编码器信号驱动器处编码器连接为D 型插头需配15芯针型插头编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞C o s +C o s -S i n +S i n -D A T A -D A T A +T F /T H /K T Y +T F /T H /K T Y -编码器电缆颜色)TU SSEW-编码器电缆型号拖缆用:13324543非拖缆用:13324578PLC驱动器输出U,V,W硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC !)PLC驱动器输出U,V,W硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)67编码器信号驱动器处编码器连接为D 型插头需配15芯针型插头编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞C o s C o s -S i n +S i n -D A T A -D A T A +T F /T H /K T Y T F /T H /K T Y -编码器电缆颜色)TU SSEW-编码器电缆型号拖缆用:13324543非拖缆用:13324578PLC驱动器输出U,V,W将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:8在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。

配置:…DRC.-0xx-DSC-A-ECR/BW Profibus DP 网关:DFP21B/UOH11B系统架构DevicenetProfibus DP一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台DRC上的的S1要拨到ON处,其它DRC上的的S1要拨到OFF处将网关的DIP开关拨到相应位置,设置相应的DP地址S2的第4为设为ON 具体使用拨码进行设定一个网关可带8台Movigear (从网关到最后一台变频器之间的SBUS 通讯线总长不要超过50米), 最后一台DRC 上终端电阻开关S1要拨到ON处,其它拨到OFF 处请将网关上的AS开关在断电时,拨到1处,上电后稳定后,将此开关拨到0,再拨回1,让网关和变频器之间建立通讯设定参数8516.0 →输出最小转速8517.0 → 输出最大转速8518.0 → 输出最大电流8304.0 → 设为10 / CTRL. WORD 2(总线PO1定义,控制启动;停止;故障复位)8305.0 → 设为1 / SPEED(总线PO2定义,设定速度)8306.0 → 设为8 / RAMP (总线PO3定义,加减速时间)8307.0 → 设为6 / STATUS WORD 1(总线PI1定义,反馈实际状态)8308.0 → 设为1 / SPEED(总线PI2定义,反馈实际转速)8309.0 → 设为2 / OUTP. CURRENT(总线PI3定义,反馈实际输出电流,为比例系数,需进行换算)8622.0 → 设为1 / YES(允许PO值发送)PLC与DFE32B/UOH11B的通讯连接,请看《SEW_MOVITRAC-B PROFINET IO总线接口DFE32B使用手册Edition2007.9》第38-43页PLC设定至变频器值PO1 : CTRL. WORD 2当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按8476.0参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按8471.0;8473.0参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按8476.0参数设定的减速斜率停止;即PO1发0 当需要故障复位时,将第6位置为1即可;如PO1对应QW256,直接赋值到QW256即可PO2 :SPEED (速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: RAMP (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可变频器反馈至PLC值PI1 : STATUS WORD 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW-DRC..DSC操作手册)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义请看SEW-DRC..DSC操作手册)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : SPEED (速度)速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm如PI2对应IW258,电机运行的速度,直接从IW258读值即可PI3 :OUTP. CURRENT (输出电流)从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:PI反馈给PLC的值为01C2(16进制),换算为10进制为450从下表可查出DRC2的额定输出电流为3.4A则电机实际运行的电流为3.4A * 450/1000 = 1.53A电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地。
③Profinet IO网卡:DFE32B ④异步电机-带绝对值型编码器…DRE(N)(S)…AS(G)7W12驱动应用场合:对于刚性连接系统,即电机编码器与物体实际运行的距离能始终保持相同比例的连接结构。
如1. 直连传动;2. 丝杆传动;3. 齿轮齿条传动;4. 同步带传动(同步带拉升量在允许范围内);5. 链条传动(链条拉升量在允许范围内)地轨L1L2L3PE编码器系统架构:3DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动4驱动器输出U,V,W必须与伺服电机的U,V,W严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从伺服驱动器至伺服电机处的动力线和编码器线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题驱动器处编码器连接为D型插头15芯针型插头制动整流块2,3端为输入,输入电压见电机铭牌左下脚;电机处编码器连接为端子编码器电缆使用专用的10芯屏蔽信号线缆,每两芯为一双绞红蓝+灰红蓝黄绿棕白黑紫编码器电缆型号拖缆用:1362204813622021SEW-绝对值型编码器A...W:RS485,Sin/Cos信号(SEW编码器电缆颜色)灰粉+粉PLCDRE(N)(S)异步电机硬件接线:升降驱动!! (建议:制动器采用快速制动,PLC保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W必须与伺服电机的U,V,W严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从伺服驱动器至伺服电机处的动力线和编码器线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题电机处编码器连接为端子驱动器处编码器连接为D型插头15芯针型插头编码器电缆使用专用的10芯屏蔽信号线缆,每两芯为一双绞红蓝+灰红蓝黄绿棕白黑紫制动整流块2,3端为输入,输入电压见电机铭牌左下脚;编码器电缆型号拖缆用:1362204813622021请将出厂时接在制动整流块5脚上的蓝色线调到4脚SEW-绝对值型编码器A...W:RS485,Sin/Cos信号(SEW编码器电缆颜色)灰粉+粉PLCDRE(N)(S)异步电机6将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.47/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
sew调试步骤自己总结s e w调试步骤自己总结 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】1.变频器调试步骤:(所用软件为M O V I T O O L S)设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS 接通(切记是在所有变频器的S1与S2设置正确的前提下)。
伺服调试步骤:(所用软件为MT_Manger)设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为Reference Travel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference位为1。
1配置:①驱动器MDX61B… ②编码器板DER11B③Profinet IO 网卡:DFE32B ④同步伺服电机-带增量型编码器…CM…RH1M(L)2系统架构:L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)3PLC驱动器输出U,V,W驱动器处编码器连接为D型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC!)4驱动器输出U,V,W U,V,W型插头PLC硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W驱动器处编码器连接为D型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号PLC6将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:7在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
配置:MG.-…-DSC…Profinet IO网关:DFE32B/UOH11B系统架构DevicenetProfinet IOMovigear电机一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台Movigear上的的S1要拨到ON处,其它Movigear上的的S1要拨到OFF处将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4连接n个Movigear,就选n * 3PD组态中的Device name和网关属性配置中的Device name要相同二:设定每一台Movigear的内部网络站号(S1的1;2;3;4位进行二进制组合):1号站设为1;2号站设为2;3号站设为3;….. 8号站设为8 S2的第4为设为ON具体使用拨码进行设定一个网关可带8台Movigear(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台Movigear上终端电阻开关S1要拨到ON处,其它拨到OFF处请将网关上的AS开关在断电时,拨到1处,上电后稳定后,将此开关拨到0,再拨回1,让网卡和变频器之间建立通讯设定参数8516.0 → 输出最小转速8517.0 → 输出最大转速8518.0 → 输出最大电流8304.0 → 设为10 / CTRL. WORD 2(总线PO1定义,控制启动;停止;故障复位)8305.0 → 设为1 / SPEED(总线PO2定义,设定速度)8306.0 → 设为8 / RAMP (总线PO3定义,加减速时间)8307.0 → 设为6 / STA TUS WORD 1(总线PI1定义,反馈实际状态)8308.0 → 设为1 / SPEED(总线PI2定义,反馈实际转速)8309.0 → 设为2 / OUTP. CURRENT(总线PI3定义,反馈实际输出电流,为比例系数,需进行换算)8622.0 → 设为1 / YES(允许PO值发送)PLC设定至变频器值PO1 : CTRL. WORD 2当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按8476.0参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按8471.0;8473.0参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按8476.0参数设定的减速斜率停止;即PO1发0当需要故障复位时,将第6位置为1即可;如PO1对应QW256,直接赋值到QW256即可PO2 : SPEED (速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: RAMP (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可变频器反馈至PLC值PI1 : STATUS WORD 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW-DRC..DSC操作手册)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义请看SEW-DRC..DSC操作手册)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : SPEED (速度)速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm如PI2对应IW258,电机运行的速度,直接从IW258读值即可PI3 : OUTP. CURRENT (输出电流)从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:PI反馈给PLC的值为01C2(16进制),换算为10进制为450从下表可查出MGF..4的额定输出电流为3A则电机实际运行的电流为3A * 450/1000 = 1.35A电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地。
配置:…DRC.-0xx-DSC-A-ECR/BW EtherNet/IP 网关:DFE33B/UOH11B
系统架构
Devicenet
一个网关可带8台变频器(从网关到最后一台变频器之间的SBUS通讯线总长不要超过50米),最后一台DRC上的的S1要拨到ON处,其它DRC上的的S1要拨到OFF处
将网关的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址
如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4
S2的第
4为设为ON 具体使用拨码进行设定
一个网关可带8台Movigear (从网关到最后一台变频器之间的SBUS 通讯线总长不要超过50米), 最后一台DRC 上终端电阻开关S1要拨到ON
处,其它拨到OFF 处
请将网关上的AS开关在断电时,拨到1处,上电后稳定后,将此开关拨到0,再拨回1,让网卡和变频器之间建立通讯
设定参数
8516.0 → 输出最小转速
8517.0 → 输出最大转速
8518.0 → 输出最大电流
8304.0 → 设为10 / CTRL. WORD 2(总线PO1定义,控制启动;停止;故障复位)
8305.0 → 设为1 / SPEED(总线PO2定义,设定速度)
8306.0 → 设为8 / RAMP (总线PO3定义,加减速时间)
8307.0 → 设为6 / STATUS WORD 1(总线PI1定义,反馈实际状态)
8308.0 → 设为1 / SPEED(总线PI2定义,反馈实际转速)
8309.0 → 设为2 / OUTP. CURRENT(总线PI3定义,反馈实际输出电流,为比例系数,需进行换算)
8622.0 → 设为1 / YES(允许PO值发送)
PLC与DFE32B/UOH11B的通讯连接,请看《SEW_MOVITRAC-B PROFINET IO总线接口DFE32B使用手册Edition2007.9》第38-43页
PLC 设定至变频器值
PO1 :
CTRL. WORD 2
当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6
需要停止电机转动时:
如只将第1位置为0,将按8476.0参数设定的减速斜率停止;即PO1发4
如只将第2位置为0,将按8471.0;8473.0参数设定的减速斜率(如果PO3定义为无功能)
或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2
如将第1位,第2位都置为0,将按8476.0参数设定的减速斜率停止;即PO1发0 当需要故障复位时,将第6位置为1即可;
如PO1对应QW256,直接赋值到QW256即可
PO2 : SPEED (速度)
速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000
如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000
如PO2对应QW258,直接赋值到QW258即可
(加减速斜坡)
PO3: RAMP
加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,
则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s
如PO3对应QW260,直接赋值到QW260即可
变频器反馈至PLC值
PI1 : STATUS WORD 1 (状态字1)
当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW-DRC..DSC操作手册)
当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义请看SEW-DRC..DSC操作手册)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可
PI2 : SPEED (速度)
速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm
如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm
如PI2对应IW258,电机运行的速度,直接从IW258读值即可
OUTP. CURRENT (输出电流)
PI3 :
从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算
如PI3对应IW260,电机运行的电流,直接从IW260读值即可
示例:
PI反馈给PLC的值为01C2(16进制),换算为10进制为450
从下表可查出DRC2的额定输出电流为3.4A
则电机实际运行的电流为3.4A * 450/1000 = 1.53A
电磁干扰屏蔽安装要求
伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地。
电磁干扰屏蔽处理不当,会出现总线易受干扰掉线;编码器脉冲信号接受错误,定位精度差;对电机进行零速控制时,电机会自行转动等故障
现象。
IP20防护等级,需装在电控柜内!。