第六章状态观测器设计说明
- 格式:ppt
- 大小:1.97 MB
- 文档页数:31
状态反馈器和状态观测器的设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目的(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置的方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步的控制系统设计三、实验原理及相关知识(1)设系统的模型如式所示若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =理想闭环系统的极点为[]123---.(1)采用 Ackermann 公式计算法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1; 3; -6];P=[-1 -2 -3];K=acker(A,B,P)Ac=A-B*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6];eig(A)'P=[-1 -2 -3];K=place(A,B,P)eig(A-B*K)'(3)设计全维状态观测器,要求状态观测器的极点为[]123---代码:a=[0 1 0;0 0 1;-4 -3 -2];b=[1;3;-6];c=[1 0 0];p=[-1 -2 -3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=a-h*c(2)已知系统状态方程为:10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =(1)求状态反馈增益阵K ,使反馈后闭环特征值为[-1 -2 -3]; 代码:A=[0 1 0;0 0 1;4 -3 -2];b=[1;3;-6];p=[-1 -2 -3];k=acker(A,b,p)A-b*keig(A-b*k)(2)检验引入状态反馈后的特征值与希望极点是否一致。

自动控制原理实验报告院(系)名称仪器科学与光电工程学院专业名称光电信息工程学生学号13171059学生姓名张辉指导教师雷旭升2016年5月实验六 状态反馈与状态观测器一. 实验目的1.掌握利用状态反馈进行极点配置的方法。
2.掌握基于状态观测器的状态反馈系统实现方法。
3.理解系统极点、观测器极点与系统性能、状态估计误差之间的关系。
二. 实验内容1.G c (s )=10.05s 2+s+1的系统结构图如图 2.6.1所示,要求设计状态反馈阵K ,使动态性能指标满足超调量σ%<5%,峰值时间t p <0.5s ,并利用电子模拟机进行实验验证。
2.被控对象传递函数为G (s )=100s 2+3.945s +103.57写成状态方程形式为{ẋ=Ax +Bu y =Cx为其配置系统极点为s 1,2=−7.35±j7.5;观测器极点为s 1,2=−30±j0。
分别计算状态反馈增益阵和观测矩阵,并进行实验验证。
分别改变几组系统极点和观测器极点,各自比较系统阶跃响应差异。
被控对象的模拟电路图如图2.6.2所示;带有状态观测器的状态反馈系统方框图如图2.6.3所示。
三. 实验原理1. 闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可利用状态反馈来配置系统的闭环极点。
这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。
在改善与提高系统性能时不增加系统零、极点,所以不改变系统阶数,实现方便。
2. 已知线形定常系统的状态方程为{ẋ=Ax +Bu y =Cx为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。
解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量x ̂(t)作为系统状态向量x(t)的估值。
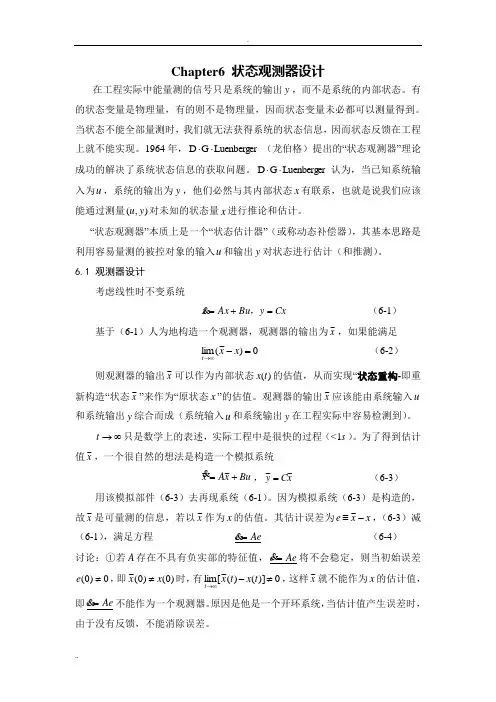
Chapter6 状态观测器设计在工程实际中能量测的信号只是系统的输出y ,而不是系统的内部状态。
有的状态变量是物理量,有的则不是物理量,因而状态变量未必都可以测量得到。
当状态不能全部量测时,我们就无法获得系统的状态信息,因而状态反馈在工程上就不能实现。
1964年,Luenberg er G D ⋅⋅(龙伯格)提出的“状态观测器”理论成功的解决了系统状态信息的获取问题。
Luenberg er G D ⋅⋅认为,当已知系统输入为u ,系统的输出为y ,他们必然与其内部状态x 有联系,也就是说我们应该能通过测量),(y u 对未知的状态量x 进行推论和估计。
“状态观测器”本质上是一个“状态估计器”(或称动态补偿器),其基本思路是利用容易量测的被控对象的输入u 和输出y 对状态进行估计(和推测)。
6.1 观测器设计考虑线性时不变系统Cx y Bu Ax x=+=,& (6-1) 基于(6-1)人为地构造一个观测器,观测器的输出为x ~,如果能满足 0)~(lim =-∞→x x t (6-2)则观测器的输出x ~可以作为内部状态)(t x 的估值,从而实现“状态重构-即重新构造“状态x ~”来作为“原状态x ”的估值。
观测器的输出x ~应该能由系统输入u 和系统输出y 综合而成(系统输入u 和系统输出y 在工程实际中容易检测到)。
∞→t 只是数学上的表述,实际工程中是很快的过程(<s 1)。
为了得到估计值x ~,一个很自然的想法是构造一个模拟系统 Bu x A x +=~~&,x C y ~~= (6-3) 用该模拟部件(6-3)去再现系统(6-1)。
因为模拟系统(6-3)是构造的,故x ~是可量测的信息,若以x ~作为x 的估值。
其估计误差为x x e -≡~,(6-3)减(6-1),满足方程 Ae e =& (6-4) 讨论:①若A 存在不具有负实部的特征值,Ae e=&将不会稳定,则当初始误差0)0(≠e ,即)0()0(~x x ≠时,有0)]()(~[lim ≠-∞→t x t x t ,这样x ~就不能作为x 的估计值,即Ae e =&不能作为一个观测器。
状态观测器 (state observer )背景:60年代初期,为了对控制系统实现状态反馈或其他需要,D.G.吕恩伯格、R.W.巴斯和J.E.贝特朗等人提出状态观测器的概念和构造方法,通过重构的途径解决了状态的不能直接量测的问题。
由龙伯格(Luenberger )提出的状态观测器理论,解决了在确定性条件下受控系统的状态重构问题,从而使状态反馈成为一种可实现的控制律。
在噪声环境下下的状态观测涉及随机最优估计理论,即卡尔曼滤波技术。
状态观测器的出现,不但为状态反馈的技术实现提供了实际可能性,而且在控制工程的许多方面也得到了实际应用,例如复制扰动以实现对扰动的完全补偿等。
定义:根据系统的外部变量(输入变量和输出变量)的实测值得出状态变量估计值的一类动态系统,也称为状态重构器。
如果动态系统Σ^以Σ0的输入,输出y 作为其输入量,能产生一组输出X ^渐近于x ,即lim t→∞(x- x ^)=0,则称Σ^为Σ0的一个状态观测器。
构造状态观测器的的基本原则是:(1)观测器Σ^应以Σ0 的输入变量和输出变量为其输入变量。
(2)Σ0必须完全可观,或其不可观子系统是渐近稳定的。
(3)Σ^的输出变量x ^是原系统Σ0的状态变量x 的实时估计值,x ^与x 之间的偏差随时间的衰减应满足一定的快速性。
(4)Σ^在结构上应尽量简单,即具备尽可能低的维数,以便于物理实现。
结构:构成状态观测器的方法依需要的不同而有差别。
最简单的是开环状态观测器(图1)。
这种观测器实质上就是按被观测系统复制的一个模型,但其状态变量可以直接输出。
只要初始条件相同x ^ (0)=x(0), x ^(t)就可作为被观测系统的状态x(t)的一个精确的估计。
但这个条件往往很难满足。
此外,这种开环观测器对外界干扰的抗干扰性和对参数变动的灵敏度都很差,它的输出x ^ (t)不能成为x(t)的一个良好估计。
因此开环状态观测器几乎没有实用价值。
采用闭环方式构成的状态观测器能克服开环状态观测器的缺点。
实验6极点配置与全维状态观测器的设计(总7页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--实验 6 极点配置与全维状态观测器的设计一、实验目的1. 加深对状态反馈作用的理解。
2. 学习和掌握状态观测器的设计方法。
二、实验原理在 MATLAB 中,可以使用 acker 和 place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K 为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容1.已知系统(1)判断系统稳定性,说明原因。
(2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置(4)使用状态反馈进行零极点配置的前提条件是什么1.(1)(2)代码:a=[-2 -1 1;1 0 1;-1 0 1];b=[1,1,1]';p=[-1,-2,-3]';K=acker(a,b,p)K =-1 2 4(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。
从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。
(4)使用状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
状态观测器设计利用状态反馈实现闭环系统的极点配置,需要利用系统的全部状态变量。
然而系统的状态变量并不都是能够易于用物理方法量测出来的,有些根本就无法量测;甚至一些中间变量根本就没有常规的物理意义。
此种情况下要在工程上实现状态反馈,就需要对系统的状态进行估计,即构造状态观测器。
状态观测器,是一个在物理上可以实现的动态系统,它利用待观测系统的可以量测得到的输入和输出信息来估计待观测系统的状态变量,以便用该组状态变量的估计值来代替待观测系统的真实状态变量进行状态反馈设计,实现闭环系统极点的再配置。
1. 全维状态观测器当对象的所有状态均不可直接量测时,若要进行状态反馈设计,就需对全部状态变量进行观测。
这时构造的状态观测器,其阶次与对象的阶次相同,被称为全维状态观测器。
考虑如下n阶单输出线性定常离散系统(1)其中,A为n×n维系统矩阵,B为n×r输入矩阵,C为n×1维输出矩阵。
系统结构图如图1所示。
图1 全维状态观测器构造一个与受控系统具有相同参数的动态系统(2)当系统(1)与(2)的初始状态完全一致时,则两个系统未来任意时刻的状态也应完全相同。
但在实际实现时,不可能保证二者初始状态完全相同。
为此,应引入两个系统状态误差反馈信号构成状态误差闭环系统,通过极点配置使误差系统的状态渐趋于零。
由于原受控系统状态不可直接量测,故用二个系统的输出误差信号代替。
引入了输出误差的状态观测器状态方程为(3)其中,H为状态观测器的输出误差反馈系数矩阵,有如下形式定义状态估计误差为,用式(7.65)与(7.67)相减可得(4)即(5)通过式(5)可以看出,若选择合适的输出误差反馈矩阵H 使得状态估计误差系统(5)的所有极点均位于z平面单位圆内,则误差可在有限拍内趋于零,即状态估计值在有限拍内可以跟踪上真实状态,且极点越靠近原点状态估计误差趋于零的速度越快,反之越慢。
可见,能否逼近x(k)以及逼近速度是由H阵决定的。
东南大学自动化学院实验报告课程名称:自动控制基础实验名称:状态观测器的设计院(系):自动化学院专业:自动化姓名:吴静学号:********实验室:机械动力楼417室实验组别:同组人员:实验时间:2011年05月13日评定成绩:审阅教师:一、实验目的1. 理解观测器在自动控制设计中的作用2. 理解观测器的极点设置3. 会设计实用的状态观测器二、实验原理如果控制系统采用极点配置的方法来设计,就必须要得到系统的各个状态,然后才能用状态反馈进行极点配置。
然而,大多数被控系统的实际状态是不能直接得到的,尽管系统是可以控制的。
怎么办?如果能搭试一种装置将原系统的各个状态较准确地取出来,就可以实现系统极点任意配置。
于是提出了利用被控系统的输入量和输出量重构原系统的状态,并用反馈来消除原系统和重构系统状态的误差,这样原系统的状态就能被等价取出,从而进行状态反馈,达到极点配置改善系统的目的,这个重构的系统就叫状态观测器。
另外,状态观测器可以用来监测被控系统的各个参量。
观测器的设计线路不是唯一的,本实验采用较实用的设计。
给一个被控二阶系统,其开环传递函数是G (s )12(1)(1)KT s T s ++,12K K K =观测器如图示。
设被控系统状态方程X =A X +B u Y =C X构造开环观测器,X ∧Y ∧为状态向量和输出向量估值X A X +Bu Y XC •∧∧∧∧== 由于初态不同,估值X ∧状态不能替代被控系统状态X ,为了使两者初态跟随,采用输出误差反馈调节,加入反馈量H(Y-Y)∧,即构造闭环观测器,闭环观测器对重构造的参数误差也有收敛作用。
X =A X +Bu+H(Y-Y)Y CX•∧∧∧∧∧=也可写成 X =(A-HC)X +Bu+HY Y CX•∧∧∧∧=只要(A-HC )的特征根具有负实部,状态向量误差就按指数规律衰减,且极点可任意配置,一般地,(A-HC )的收敛速度要比被控系统的响应速度要快。
第一题说明状态观测器的目的,以
及设计状态观测器的原则
当利用状态反馈配置极点时,需用传感器测量状态变量以便实现反馈,但通常只有被控对象的输入量和输出量能用传感器测量,多数状态变量不易或不能测量,于是提出了利用被控对象的输入量和输出量建立状态观测器来重构状态的思想。
但是,被控对象的初始状态很可能很不同,模拟系统中积分器的初
始条件又只能预估,因而两个系统的初始状态总有差异,即使两个系统
的ABC阵完全一样(通常不可能),也必定存在估计状态与被控对象实
际状态的误差(x^-x),难以实现所需要的状态反馈。
但估计状态与被控对象实际状态的误差存在,
必然导致(y^-y)存在,可以根据反馈原理将(y^-
y)反馈至估计状态微分处
6
可以将状态观测器看为两个输入(u,y),输出为x^的系统观测器正常工作的条件(t→∞)(x^(t)-x(t))=0
要求A-HC特征值具有负实部
注意:选择H阵参数时,应防止数值过大带来的
实现困难,通常希望观测器响应速度比状态反
馈系统的响应速度要快些。
第二题状态反馈配置极点是否唯一?
为什么?举例说明?
9
对于单输入系统,被配置极点确定时,K唯一
对于多输入系统,被配置极点确定时,K阵不唯一。
其原因在于K阵是一个p×n的矩阵,共有个p×n未知数,而方程只有n个,当p=1时,未知数等于方程数,解唯一,当p>1时,未知数>方程数解不唯一
结论
THANK YOU!。