基于单片机的信件分拣系统的设计与仿真
- 格式:doc
- 大小:96.50 KB
- 文档页数:2

摘要:提出了一种基于STM32F103的智能快递分拣控制系统的设计方案,介绍了快递分拣系统的快件识别及位置信息数据通信硬件电路设计,并给出了分拣系统条码识别、快件分拣的处理方法,该方案设计合理、性价比高,满足小型快递企业的快递分拣需求,提高了分拣效率。
关键词:快递分拣;单片机;条码识别中图分类号:TP273文献标识码:B 文章编号:1671-9123(2019)03-0139-05收稿日期:2019-04-29基金项目:三门峡职业技术学院科技创新项目(SZY-2017-035)作者简介:杨丽(1975—),女,河南三门峡人,三门峡职业技术学院电气工程学院副教授,主要从事单片机及其智能控制技术研究。
目前我国快递数量在逐年剧增,中小城市的小型快递公司也越来越多,各个快递公司业务中的首要环节就是快递分拣业务。
而如何快速进行包裹的分拣,是快递公司提高效率的重中之重,为解决人工分拣中的速度慢、效率低、容易出错问题,现有很多智能快递分拣系统结构复杂、功能庞大,尤其是昂贵的价格导致很多小型快递公司无力购置[1-4],本项目针对快递行业中中小城市的小型快递公司需求,设计了一款基于STM32F103微处理器的智能快递分拣系统,主要实现包裹信息的识别、检测、自动分选功能,目的在于提高快递公司分拣快件的效率。
1系统组成小型智能快递分拣控制系统主要由主机控制系统和若干个分拣控制模块组成,主机控制系统包括STM32F103处理器、迪文串口屏以及读码器、通信模块组成。
分拣控制模块包括STM32F103处理器、红外传感及快件分拣电机驱动电路组成,系统整体框图如图1所示。
本系统工作时由工作人员将快件放置在传送带上,由传送带将快件送至主机控制模块的读技术与应用基于STM32F103的智能快递分拣系统设计◎杨丽范江波(三门峡职业技术学院电气工程学院,河南三门峡472000)码器下方,读码器首先读取快件信息,然后将快件要分拣的信息进行记录并显示到串口彩色屏上,并利用通信模块将相应的快件信息发送至计算机主机进行记录和数据保存。


基于51单片机快递自动分拣控制系统的设计
摘要:
近年来,随着快递业务的不断发展,快递自动分拣技术也在逐步完善。
本文设计了一种基于51单片机的快递自动分拣控制系统,该系统通过光电传感器、马达和蜂鸣器等模块实现了自动分类和分拣的功能。
首先,该系统通过光电传感器实现了快递箱的检测功能,当快递箱通过光电传感器时,系统能够识别快递箱的类型和编号。
接着,通过编码器和电机的组合,实现了快递箱的定位和分拣的功能。
最后,该系统通过蜂鸣器和LED灯等模块,实现了自动提示和报警功能。
实验结果表明,该系统能够高效、准确地完成相应的分拣任务,达到了预期的效果。
本文的设计对于快递自动分拣领域有一定的参考价值,对于提高快递分拣效率和自动化程度具有重要的意义。

基于深度学习的快递分拣系统设计与实现随着各行业的快速发展,智能化技术的广泛应用已经成为一个趋势。
快递行业作为一种基础性的服务行业,必须要不断提升其效率和服务质量,以满足客户的需求。
因此,基于深度学习的快递分拣系统的设计与实现迎来了最好的时机。
1. 深度学习的发展与应用深度学习是一种机器学习中比较热门的技术,它可以通过训练神经网络来完成自动化的任务。
随着深度学习在视觉、语音、自然语言处理、游戏等领域的广泛应用,其在快递行业中的应用也越来越受到关注。
快递分拣作为一项劳动力密集型的工作,如果能够实现自动化,将大大提升效率和质量。
2. 快递分拣系统的设计与实现为了实现快递分拣的自动化,我们需要一个稳定的、高效的系统。
快递分拣系统的核心部分是分拣算法。
基于深度学习的分拣算法可以大大提高分拣的准确率。
我们可以采用深度学习中比较流行的卷积神经网络(Convolutional Neural Network, CNN)算法,这种算法可以有效处理图像数据。
3. 快递分拣系统的具体实现首先,需要建立一个深度学习模型,训练模型使其具备分拣功能。
模型的输入是一个快递包裹的图像数据,输出是一个分类结果,即表示快递包裹应该被送到哪个地方。
接着,需要对模型进行训练。
我们可以使用大量的样本数据来训练模型,包括图像数据和相应的标签数据。
训练结束后,模型将会根据输入图像自动输出相应的分类结果。
4. 具体实验效果为了验证基于深度学习的快递分拣系统的实用性,我们进行了相关的实验。
我们使用了1000个包裹图像数据作为训练数据,并使用了200个包裹图像数据做真实测试。
实验结果显示,我们的模型在分类准确率上达到了95%以上的高水平,大大提高了快递分拣的效率。
5. 总结基于深度学习的快递分拣系统可以为快递行业带来极大的效益。
其设计与实现需要具备一定深度学习的知识,但随着技术的发展和普及,越来越多的人可以参与到这一领域中来。
我们相信,未来的快递行业将会越来越智能化,为人民提供更加便捷、高效的服务。

基于单片机控制的质量分拣装置设计在自动化生产线的各个环节中,分拣装置是其中的一个重要环节。
最早的分拣装置为人工分拣装置,因劳动强度大、错误率高、生产效率低、工作环境恶劣等原因早被淘汰。
生产效率对企业来说是一项极重要的指标,只有高的生产效率,企业才可以拥有旺盛的生命力[1],此时自动分拣装置便应运而生。
自动分拣装置具有多种优点,加入了闭环控制算法,是传统的分拣装置不能代替的,所以其应用也变得越来越广泛。
1总体方案设计传送带上的产品有两个质量区间:大于或小于某个设置的质量数值,即误差在一定的范围内才符合要求,对于橡胶厂胶条要在30kg+5g 这个数值范围内。
本装置能够检测这两种产品的质量,然后按照设定要求进行质量分拣,由称重传感和分拣装置两部分组成。
称重部分主要由单片机最小系统、电源、按键、数据通信、传送带、液晶显示屏、数码管等组成。
分拣装置主要由直流电机、顶杆部分、物料仓、传送带和机械手等部分组成,其原理见图1。
1.1初始化1)上电后进行初始化,各部分初始状态要求为:一是电源指示灯亮;二是LCD 显示屏显示初始化,此接口保留时间约为2s ,然后清屏;三是数码管为全灭状态;四是上位机串口接收“系统初始化完毕”。
2)系统初始化设置。
一是质量标准设置,根据用户需求通过串口设置检测质量为“x g ”;二是分拣方案设置,通过串口发送格式,高于x g ”的命令设置分拣方案,当被检测物体的质量高于设定质量时,该物体会被切割刀具切割,被检测物体的质量低于设定质量时,被测物体会通过传送平台。
以上设置完成的方案会刷新显示在液晶显示屏上,以备检查核实,也可以手动完成以上设置功能。
文章编号:1674-9146(2020)0657-04杨少沛1,张玲玲1,杨庆华2,秦四2[基金项目]焦作市2019年科技计划项目(20194830);河南省智能制造技术与装备工程技术研究中心资助项目收稿日期:2020-04-09;修回日期:2020-05-13作者简介:杨少沛(1981-),男,河南鲁山人,讲师,主要从事电气工程及其自动化方向的教学与科研工作,E-mail :****************。
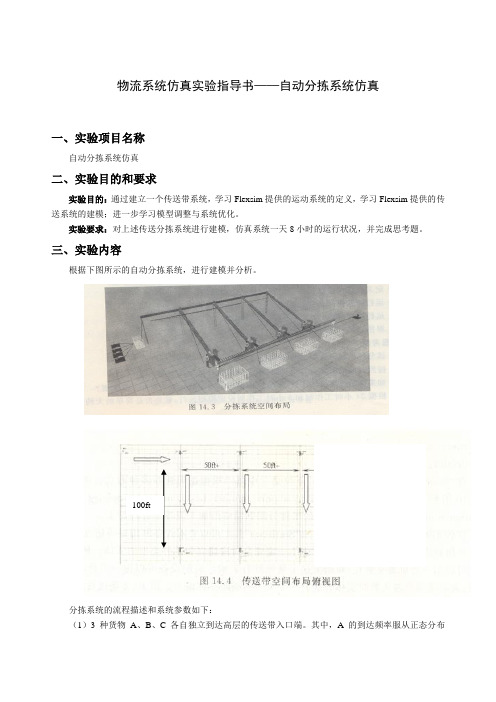
物流系统仿真实验指导书——自动分拣系统仿真一、实验项目名称自动分拣系统仿真二、实验目的和要求实验目的:通过建立一个传送带系统,学习Flexsim提供的运动系统的定义,学习Flexsim提供的传送系统的建模;进一步学习模型调整与系统优化。
实验要求:对上述传送分拣系统进行建模,仿真系统一天8小时的运行状况,并完成思考题。
三、实验内容根据下图所示的自动分拣系统,进行建模并分析。
100ft分拣系统的流程描述和系统参数如下:(1)3种货物A、B、C各自独立到达高层的传送带入口端。
其中,A的到达频率服从正态分布normal(400,50)s;B的到达频率服从均匀分布uniform(500,100)s;C的到达频率服从均匀分布uniform(150,30)s。
(2)3种不同货物沿一条传送带传送,根据品种的不同,由分拣装置将其推入3个不同的分拣道口,经各自的分拣通道到达操作台。
(3)每个检验包装操作台需操作工1名,货物经检验合格后打包,被取走。
(4)每检验一件货物的占用时间服从均匀分布uniform(60,20)s。
(5)每种货物都可能有不合格产品。
检验合格的产品放入箱笼;不合格的通过地面传送带送往检修处进行修复。
A的合格率为95%;B为96%;C为97%。
(6)传送带的传送速度可采用默认速度。
四、主要仪器设备计算机、Flexsim仿真软件五、操作方法与实验步骤(1)新建一个模型,定义source、operator、sink等实体及其参数(2)定义传送系统,定义各段传送带的参数,完成传送系统的空间布置(3)定义系统的按货物类型进行分拣的逻辑流程(4)运行调整模型,直到模型按照实际系统流程正确运行(5)运行模型,得到数据和图表等多种结果(6)根据结果对系统进行分析(1)构建模型2.设置参数六、实验结果与分析对运行数据进行统计分析,并回答如下问题:(1)该分拣系统一天的总货物流量约为多少?472(2)按照目前的配置,该系统能够承受的最大日流量是多少?246+325+1099=1670。
学校代码: 10128学号: 010202064(本科毕业设计说明书题目:分拣机器人单片机控制系统设计学生姓名:学院:系别:专业:班级:指导教师:二〇一七年五月摘要一般的分拣机器人由于其操作方式较复杂,分拣的效率较差,人机交互系统的不太完善,机械性能欠佳等已经很难满足当今社会的生产实践需要。
伴随着社会的飞速发展,人们对性能优良智能分拣人的需求也与日俱增。
设计一款基于单片机的分拣机器人有很大的实践需要和社会功能。
根据控制系统的要求,决定采用美国INTEL公司MCS-51系列单片机基本产品89C52,作为分拣机器人的主控制芯片。
它具有运行速度快,功耗低,抗干扰能力强等优点,能够完全我的设计要求。
本系统包括硬件和软件两个部分。
硬件系统主要包括电压转换电路的设计、单片机连接PC机串口电路的设计,单片机系统的设计,驱动电路的设计,显示电路的设计等。
在电路图板上完成各模块的设计与连接。
分析易得,此系统可以完全满足设计需要。
通过光耦等器件克服电机驱动部分与单片机部分的相互干扰。
关键词:单片机;硬件设计;软件编程;89C52AbstractThe general sorting robot is more complicated due to its operation,sorting is less efficient,human-computer interaction system is not perfect,poor mechanical performance has been difficult to meet the needs of today's social production practice. Accompanied by the rapid development of society,the demand for smart sorters is also growing。
Science and Technology &Innovation ┃科技与创新2021年第21期·109·文章编号:2095-6835(2021)21-0109-02基于单片机的颜色识别及分拣系统设计*徐小艳,崔雪英(铜陵学院电气工程学院,安徽铜陵244000)摘要:在分析颜色识别分拣系统的应用场合及功能需求的基础上,设计了颜色识别分拣的硬软件系统,采用颜色传感器TCS3200识别采集的颜色信息,单片机收到信息后,通过驱动步进电机的转动送到相应的颜色区,并进行相应的语音信息播报。
实验仿真结果显示,本系统具有识别准确、自动化程度高等特点。
关键词:颜色识别;单片机;分拣电路;语音播报中图分类号:TP212;TP391.41文献标志码:ADOI :10.15913/ki.kjycx.2021.21.047在科技不断提高,企业规模化生产的背景下,自动化迅速成为工农业的主流。
在工农业生产的自动化过程中,颜色的识别及分拣在食品、医药、化工等行业都有着重要意义。
如制药行业中将不同颜色的药丸分离开、农产品颜色识别确定果实的成熟度等。
本文设计了一种以颜色识别传感TS3200为基础,以51单片机为核心的颜色识别及分拣系统。
1系统总体设计系统是以51单片机为核心,扩展合适的外围电路,完成了对产品的颜色识别及分拣。
其结构框图如图1所示。
图1分拣系统结构框图整个系统以微处理器为中心,包括颜色信息的采集及分拣两大部分。
颜色传感器将采集到的颜色信息送入微处理器,微处理器对信息进行运算、处理识别,处理后的颜色识别信息作为输出信号,驱动单片机的执行机构进行相应的分拣操作。
整个系统由颜色识别电路模块、直流电机驱动模块、语音播报模块等部分组成。
2系统硬件设计系统硬件的微处理器采用89C51,主要由颜色识别电路、分拣电路及语音播报电路三个部分组成。
2.1颜色识别电路设计首先系统利用红外线传感器检测需要识别的物品是否准备好,然后通过颜色传感器检测出被分拣物品颜色信息信号,并将信号发送给单片机,单片机通过接收到的信号信息进行相应的分拣操作。
武汉工程大学继续教育学院毕业设计(论文)说明书题目基于PLC的邮件分拣处理系统专业班级学生指导教师总评成绩年月日武汉工程大学继续教育学院毕业设计(论文)任务书专业班级学生一、课题名称基于PLC的邮件分拣处理系统二、课题条件计算机一台、设计仿真软件Proteus、PCB制版工具Protel等。
三、任务(含实验、分析、计算、绘图、论述等内容)推挂式邮袋分拣机是一种连续自动输送分拣邮件系统,可实现邮件的提升、传输、分类、统计和配发等生产流程,其价格性能比处于国际领先水平。
控制系统由可编程序控制器、装置、电源、动力控制、上袋胶带机控制等部分组成。
根据上述系统要求确定应用系统的方案,划分硬件和软件的功能,并进行模块设计与系统仿真。
四、设计(论文)说明书内容邮件分拣系统由邮码识别器、传送带、分拣箱、气动开关等组成。
邮件经邮码识别系统识别后在传送带上传输,分拣箱按邮码的大小顺序排列在传送带一侧,当邮件到达与其编码相对应的分拣箱位置时,由气动开关将其弹入分拣箱中,实现邮件分拣的目的。
可编程序控制器( PLC) 具有可靠性高,编程容易,维修方便,通用性好,体积小等特点,成为当今用途最为广泛的工业控制器。
现在,它的应用早已突破了最初逻辑控制的场合,深入到过程控制、位置控制、网络通信等工程领域。
文中利用PLC 内部定时器实现邮件分拣系统的并行处理技术,保证了系统具有可靠性高,维修方便,性价比高,明显地提高邮件分拣效率。
五、计划进度1、发题时间年月日2、第1-2周:根据毕业设计选题收集参考资料,设计出系统设计方案。
3、第3-6周:根据设计方案进行原理图、控制代码等具体功能设计并调试系统。
4、第7-9周:根据设计资料整理毕业论文,按论文书写规范完成毕业论文。
5、第10-11周:论文形式审查与答辩。
指导教师指导小组负责人年月日年月日武汉工程大学继续教育学院毕业设计(论文)评审表(指导教师用)武汉工程大学继续教育学院毕业设计(论文)答辩小组意见书专业班级学生姓名题目基于PLC的邮件分拣处理系统。
毕业设计论文基于单片机的自动拣货系统设计诚信申明本人申明:我所呈交的本科毕业设计(论文)是本人在导师指导下对四年专业知识而进行的研究工作及全面的总结。
尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中创新处不包含其他人已经发表或撰写过的研究成果,也不包含为获得北京化工大学或其它教育机构的学位或证书而已经使用过的材料。
与我一同完成毕业设计(论文)的同学对本课题所做的任何贡献均已在文中做了明确的说明并表示了谢意。
若有不实之处,本人承担一切相关责任。
本人签名:年月日目录第1章绪论 (9)1.1选题背景及研究意义 (9)1.2分拣系统的介绍 (10)1.3分拣系统的发展展望 (10)1.4课题设计的主要内容 (12)第2章系统总体设计 (13)2.1设计要求 (13)2.2功能特点 (13)第3章方案的论证 (15)3.1主控芯片的选择 (15)3.2显示模块 (15)3.3光电传感器的选择 (16)3.4电机驱动模块的选择 (16)3.5铁传感器的选用 (16)3.6铝传感器的选用 (17)3.7颜色传感器的选用 (19)第4章系统硬件设计 (20)4.1硬件模介绍 (20)4.1.1单片机技术简介 (20)4.1.2系统主要芯片和元器件的介绍及应用 (20)4.1.3 ULN2003电机驱动模块介绍 (23)4.1.4 LCD液晶显示模块介绍 (24)4.1.5 蜂鸣器模块 (27)4.1.6 霍尔传感器 (28)4.2单片机最小系统的设计 (29)4.2.1 时钟脉冲电路 (29)4.2.2复位电路 (29)4.3硬件设计总图 (30)第5章软件程序设计 (31)5.1软件程序整体设计 (31)5.1.1程序流程图 (31)5.2程序模块设计 (31)5.2.1 电机控制程序设计 (31)5.2.2 LCD1602显示程序设计 (33)5.2.3按键扫描程序设计 (34)第6章系统测试及分析 (42)6.1系统测试 (42)总结 (43)参考文献 (44)附录A (45)1.系统整体电路图 (45)致谢 (46)基于单片机金属自动分拣系统设计zzzzxxxxxxxxxx0601班学号060401001指导教师张三副教授摘要:随着科学技术的飞速发展,现代工业控制系统越来越复杂,传统控制科学面临着新的挑战。
基于单片机的信件分拣系统的设计与仿真
1 智能化分拣系统原理
1.1 系统的基本组成
如图1所示,智能化邮包分拣系统由上件装置、分拣装置、信号识别装置、传动链、分拣格口、计算机控制系统组成。
各部分功能如下:
(1) 上件装置将贴有条形码的邮包输送到分拣装置上,在此须注意控制上件装置的速度和传动链牵引保持同步,以便邮包准确的输送到分拣装置上。
(2) 分拣装置分拣装置有很多种,如推出式、浮出式、倾斜式、输送式很分支式等不同装置对分拣的货物由不同的要求。
在本设计中分拣装置选用一小型的皮带输送机。
其主要组成为:电动滚筒、转向滚筒和皮带。
其中电动滚筒为动力装置。
根据计算机控制系统发出的指令运作,将分拣装置上的邮包分拣到指定的格口中。
(3) 信号识别装置其作用是识别接收待分拣邮包上的信号,根据信号要求去指示分拣装置分拣邮包到指定的分拣格口中。
信号识别有很多种方式,如人工输入、色码扫描、键盘输入、条形码输入、重量检测、语音识别、形状识别及高度检测等。
将这些信号输入到计算机系统中,根据这些信号来决定某一种物品该进入哪一个分拣格口。
在本设计中要分拣贴有条形码的邮包,信号识别装置采用全向条形码扫描仪。
由于分拣速度很快,条形码信号的扫描也属于在线扫描。
结合本系统的特点和要求以及条形码扫描仪的价格等方面的因素,在此选用新大陆系列中的NLS-FM-001固定式的激光全自动扫描仪。
(4) 传动链在系统中,传动链是所有分拣装置运动的动力源,牵引着皮带输送机和邮包运行。
(5) 分拣格口分拣格口是分拣物品脱离主输送机进行集中的通道,一般由钢带、皮带、滚筒、容器等组成滑槽,以便物品从分拣装置滑向集中站台或其它接口设备。
由工作人员将该格口的所有物品进行集中处理。
(6) 计算机控制系统计算机控制系统的作用是对扫描仪所采集的信息进行处理,并采用单片机控制分拣装置的运转,以保证信息处理和物品分拣的可靠性。
图1 智能化邮件分拣系统示意图
2 控制系统的硬件设计
2.1 控制系统的基本工作原理
该控制系统以8个分拣口例,采用89c51单片机控制。
由条形码扫描仪测得的信号通过标准的RS-232C串行口输入到单片机中,单片机将该包含有分拣信息的信号与存储在其内的分拣信息及对应的分拣口地址进行比较。
比较得到分拣口的地址时开始计时,计时结束后启动对应的输出口,单片机的P1口接通驱动电路,在对应的输出口启动固态继电器,从而启动皮带输送机的电动滚筒,进而进行邮包的分拣。
在本设计的自动分拣系统中,由于条形码扫描仪的首读率和分辨率都很高,所以很少有未能分拣的邮包,但也不排除可能,针对这种情况,可采用人工分拣的方法辅助处理。
2.2 条形码识别系统的组成
条形码系统的组成如图2所示,主要包括扫描系统、信号整形系统、译码系统和计算机。
图2 条形码识别系统的组成
扫描系统由光学系统及探测器即光电转换器件组成,用来完成对条形码的光学扫描,并通过光电探测器,将条形码扫描的光信号转换成电信号。
信号整形部分由信号放大、滤波、波形整形几部分组成,它的功能是将条形码的光电扫描信号处理成标准电位的矩形波信号,其高低电平的宽度和条形码符号的条空尺寸相对应。
译码部分一般由嵌入式微处理器组成,它的功能是对条形码的矩形波信号进行译码,其结果通过接口电路输出到条形码应用系统中的数据终端。