机器人视觉伺服定位控制与目标抓取
- 格式:ppt
- 大小:25.14 MB
- 文档页数:62
视觉引导工业机器人定位抓取系统设计研究摘要:随着工业机器人在制造业的广泛应用,其定位抓取系统的稳定性和准确性对于提高生产效率和质量至关重要。
本文通过研究视觉引导工业机器人定位抓取系统的设计,旨在提高其定位抓取精度和实时性。
首先,介绍了视觉引导系统的基本原理和工业机器人的定位抓取技术。
然后,基于视觉传感器的实时图像处理技术,设计了一个基于模板匹配算法的目标定位方法。
接着,介绍了基于传感器融合的位姿估计方法,以提高定位的稳定性和准确性。
最后,通过实验验证了所设计系统的性能和可行性,证明了其在工业机器人应用中的潜力。
关键词:工业机器人;视觉引导;定位抓取;模板匹配;位姿估计一、引言工业机器人在制造业中的应用越来越广泛,其定位抓取系统的稳定性和准确性对于提高生产效率和质量至关重要。
传统的定位抓取方法主要依赖于编程和机械传感器,但在复杂环境中容易受到干扰,不具备足够的鲁棒性。
因此,研究视觉引导工业机器人定位抓取系统具有重要意义。
二、视觉引导工业机器人定位抓取原理视觉引导工业机器人定位抓取系统利用视觉传感器获取环境信息,并通过图像处理算法来实现目标定位和位姿估计。
其主要原理是根据事先设定的目标特征,比如颜色、形状等,通过图像处理技术将目标从环境中提取出来,然后计算目标的位姿信息,最后将位姿信息传递给机器人控制系统,实现精确的定位抓取。
三、基于模板匹配的目标定位方法模板匹配是一种基本的图像处理技术,可以用于目标的识别和定位。
该方法通过比对目标模板和图像中的每个像素,来寻找最佳匹配位置。
在工业机器人定位抓取系统中,可以采用模板匹配算法来实现目标的定位。
具体步骤包括:图像的预处理、模板的生成、模板匹配和目标定位。
四、基于传感器融合的位姿估计方法传感器融合是一种将多个传感器的信息进行整合,以提高位姿估计的精度和鲁棒性的方法。
在视觉引导工业机器人定位抓取系统中,可以通过融合视觉传感器和惯性传感器的数据,来提高位姿估计的稳定性和准确性。
无标定视觉伺服在机器人跟踪多特征点目标的应用宋平康庆生孟正大东南大学摘要:介绍了一种眼在手上的机器人3D视觉跟踪多特征点目标的无标定视觉伺服。
利用基于递推最小二乘法估计图像雅可比矩阵伪逆的无标定视觉伺服,这种方法无需计算雅可比矩阵伪逆,避开了图像雅可比矩阵伪逆计算的奇异性问题。
实验结果验证了这种方法的可行性,为机器人抓取目标打下了基础。
关键词:眼在手上多特征点无标定视觉伺服3D视觉跟踪Application of Un-calibrated Visual Servo in Tracking Multi-feature ObjectSong Ping Kang Qingsheng Meng ZhengdaAbstract: This paper presents an uncalibrated control method for robotic vision-guided targets 3D tracking using an eye-in-hand camera. The uncalibrated visual servoing is adopted to fulfill the online recursive estimation of image Jacobian pseudo-inverse matrix, This method doesn’t compute the moore-Penrose inverse of image Jacobian and avoid the singularity of image Jacobian. This experiamental results demonstrate the feasibility of this method and experiment lays the groundwork for grasping target.Keywords: eye-in-hand feature points uncalibrated visual servoing 3D visual tracking1 引言近年来,越来越多的机器人被用于工业生产,其领域主要有机器人焊接、工件装配等。

机器人视觉定位穴位原理上期简单介绍了机器人如何进行视频回传和回传视频的一些简单参数,这期我们通过一个简单的案例来讲解下,机器人通过视觉能够实现的功能。
机器人定位抓取。
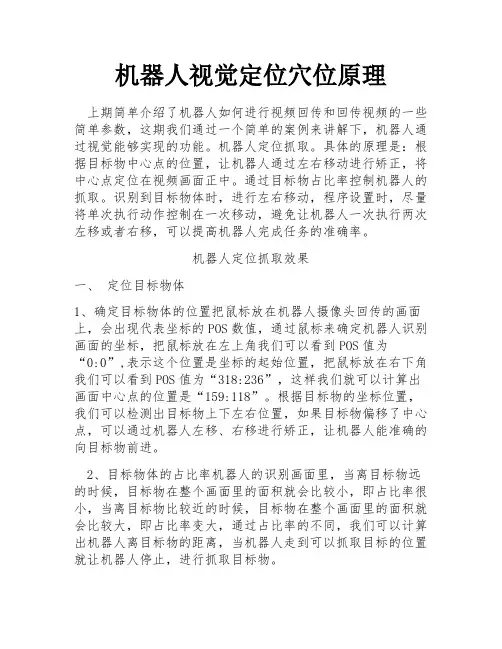
具体的原理是:根据目标物中心点的位置,让机器人通过左右移动进行矫正,将中心点定位在视频画面正中。
通过目标物占比率控制机器人的抓取。
识别到目标物体时,进行左右移动,程序设置时,尽量将单次执行动作控制在一次移动,避免让机器人一次执行两次左移或者右移,可以提高机器人完成任务的准确率。
机器人定位抓取效果一、定位目标物体1、确定目标物体的位置把鼠标放在机器人摄像头回传的画面上,会出现代表坐标的POS数值,通过鼠标来确定机器人识别画面的坐标,把鼠标放在左上角我们可以看到POS值为“0:0”,表示这个位置是坐标的起始位置,把鼠标放在右下角我们可以看到POS值为“318:236”,这样我们就可以计算出画面中心点的位置是“159:118”。
根据目标物的坐标位置,我们可以检测出目标物上下左右位置,如果目标物偏移了中心点,可以通过机器人左移、右移进行矫正,让机器人能准确的向目标物前进。
2、目标物体的占比率机器人的识别画面里,当离目标物远的时候,目标物在整个画面里的面积就会比较小,即占比率很小,当离目标物比较近的时候,目标物在整个画面里的面积就会比较大,即占比率变大,通过占比率的不同,我们可以计算出机器人离目标物的距离,当机器人走到可以抓取目标的位置就让机器人停止,进行抓取目标物。
(机器人在不同位置下看到的目标物占比率也不同)二、程序编写在程序中我们以红色标记目标物,设置前提条件,是否识别到目标物颜色,如果识别到就进行检测目标物的占比率,(该RGB值在不同光源状态下所测的值也不同)程序如下:这期讲解了机器人如何通过视频回传的颜色识别来抓取目标物体。
运用到了面积占比模块来提高抓取的成功率,另外也需要对机器人的抓取动作进行简单的调试,这样也可以提高成功率。
下期我们将继续更新颜色识别的其他案例。
基于视觉感知的机器人操作与抓取技术研究在现代社会中,机器人已经成为人们生活中不可或缺的一部分。
而机器人的操作与抓取技术,作为机器人领域的重要组成部分,正在不断得到研究和发展。
基于视觉感知的机器人操作与抓取技术是近年来受到广泛关注的研究领域之一。
本文将从机器人操作与抓取技术的基本原理、现实应用、挑战和发展前景等方面,对基于视觉感知的机器人操作与抓取技术进行探讨。
首先,我们来了解一下基于视觉感知的机器人操作与抓取技术的基本原理。
该技术主要基于计算机视觉、图像处理、机器学习等前沿科学技术,通过对环境中目标物体的感知和识别,从而实现机器人的操作与抓取动作。
具体而言,基于视觉感知的机器人操作与抓取技术包括三个主要步骤:视觉感知、目标识别和追踪、操作与抓取。
首先,通过机器人搭载的摄像头等视觉传感器,对周围环境进行感知和获取图像信息;然后,利用计算机视觉技术,对感知到的图像进行目标物体的识别和跟踪,确定操作和抓取的目标;最后,通过机器人的可编程自主操作,实现对目标物体的准确操作和抓取动作。
基于视觉感知的机器人操作与抓取技术在现实生活中具有广泛的应用价值。
首先,在工业生产领域,机器人可以通过视觉感知技术,实现对复杂物体的自主操作和抓取,提高生产效率和质量。
例如,在汽车制造过程中,通过机器人的自主操作和抓取,可以完成对汽车零部件的装配和检测等任务,减少了人工操作的成本和风险。
其次,在医疗领域,机器人操作和抓取技术可以被应用于手术机器人和辅助护理机器人等设备中,实现对病人的精确操作和抓取,提高手术效果和护理质量。
此外,基于视觉感知的机器人操作和抓取技术还可以被应用于家庭服务机器人、军事安全和救援等领域,为人们的生产生活提供更多便利和安全保障。
然而,基于视觉感知的机器人操作与抓取技术在实际应用过程中仍然存在一些挑战,需要进一步研究和解决。
首先,目标物体的复杂性和多样性对机器人的操作和抓取能力提出了更高的要求。
目标物体的外观形状、质地、颜色等特征的多样性,以及环境中的光照和背景干扰等因素都会影响机器人的感知和识别能力。
《基于视觉引导的ABB机器人定位与抓取研究》一、引言随着人工智能、机器视觉和自动化技术的快速发展,工业生产过程中的机器人技术得到了广泛应用。
其中,基于视觉引导的机器人定位与抓取技术成为了研究的热点。
本文以ABB机器人为研究对象,对其在视觉引导下的定位与抓取技术进行深入研究,旨在提高机器人在复杂环境下的作业效率和准确性。
二、研究背景与意义ABB机器人作为工业自动化领域的佼佼者,其定位与抓取技术的研发对于提高生产效率、降低人力成本具有重要意义。
视觉引导技术通过图像处理和模式识别,为机器人提供目标物体的位置和姿态信息,从而实现对目标的精准定位与抓取。
本研究不仅有助于提升ABB机器人在工业领域的应用价值,还为其他类型机器人的研发提供借鉴。
三、相关文献综述近年来,国内外学者在机器人视觉定位与抓取技术方面取得了显著成果。
在视觉系统方面,研究主要集中在图像处理、特征提取和目标识别等方面;在机器人控制方面,则关注于路径规划、运动控制和力控制等方面。
此外,还有一些学者将深度学习等人工智能技术应用于机器人视觉系统中,提高了机器人在复杂环境下的作业能力。
然而,目前的研究仍存在一定局限性,如对光照、颜色和形状等变化的适应性不足,以及在动态环境下的实时性等问题。
因此,本研究旨在解决这些问题,提高机器人的作业效率和准确性。
四、研究内容与方法本研究以ABB机器人为研究对象,采用视觉引导技术实现目标的定位与抓取。
具体研究内容包括:1. 视觉系统设计与实现:设计并实现一个适用于ABB机器人的视觉系统,包括图像处理、特征提取和目标识别等模块。
2. 目标定位与抓取策略:研究目标物体的定位方法,包括基于图像处理的定位和基于机器学习的定位。
同时,研究抓取策略,包括抓取点的选择、抓取力的控制等。
3. 实验设计与分析:设计实验验证所提出的定位与抓取策略的有效性,并对实验结果进行分析。
研究方法主要包括文献调研、理论分析、实验设计和数据分析等。

【机器人识别抓取】基于视觉的机器人抓取——从物体定位、物体姿态估计到平行抓取器抓取估计导读抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种抓取方法。
各位对机器人识别抓取感兴趣的小伙伴,一定要来看一看!千万别错过~ 目录/ contents1. 引言1.1 抓取综合方法1.2 基于视觉的机器人抓取系统2. 抓取检测、视觉伺服和动态抓取2.1 抓取检测2.2 视觉伺服控制2.3 动态抓取3. 本文实现的方法3.1 网络体系结构3.2 Cornell 抓取数据集3.3 结果评估3.4 视觉伺服网络体系结构3.5 VS数据集1引言找到理想抓取配置的抓取假设的子集包括:机器人将执行的任务类型、目标物体的特征、关于物体的先验知识类型、机械爪类型,以及最后的抓取合成。
注:从本文中可以学习到视觉伺服的相关内容,用于对动态目标的跟踪抓取或自动调整观察姿态。
因为观察的角度不同,预测的抓取框位置也不同:抓取物品离相机位置越近,抓取预测越准。
1.1抓取综合方法抓取综合方法是机器人抓取问题的核心,因为它涉及到在物体中寻找最佳抓取点的任务。
这些是夹持器必须与物体接触的点,以确保外力的作用不会导致物体不稳定,并满足一组抓取任务的相关标准。
抓取综合方法通常可分为分析法和基于数据的方法。
分析法是指使用具有特定动力学行为的灵巧且稳定的多指手构造力闭合基于数据的方法指建立在按某种标准的条件下,对抓取候选对象的搜索和对象分类的基础上。
(这一过程往往需要一些先验经验)1.2基于视觉的机器人抓取系统基于视觉的机器人抓取系统一般由四个主要步骤组成,即目标物体定位、物体姿态估计、抓取检测(合成)和抓取规划。
一个基于卷积神经网络的系统,一般可以同时执行前三个步骤,该系统接收对象的图像作为输入,并预测抓取矩形作为输出。
而抓取规划阶段,即机械手找到目标的最佳路径。
它应该能够适应工作空间的变化,并考虑动态对象,使用视觉反馈。
工业机器人的智能视觉识别与抓取系统工业机器人的智能视觉识别与抓取系统在现代制造业中起到了重要的作用。
随着科技的不断进步,工业机器人正在成为生产线上的主要力量。
然而,传统的编程方式对于工业机器人的操作和任务完成效率有一定的局限性。
为了克服这些限制,研发人员开始探索智能视觉识别与抓取系统的应用。
本文将深入探讨工业机器人的智能视觉识别与抓取系统的功能、优势以及应用前景。
一、智能视觉识别与抓取系统的功能智能视觉识别与抓取系统是一种集成了摄像头、图像处理算法和机器学习技术的高级系统。
它可以让工业机器人像人类一样观察和理解环境,并根据所获取的图像信息做出相应的动作。
具体而言,智能视觉识别与抓取系统具有以下功能:1. 图像捕捉:通过摄像头捕捉现场图像,传输给图像处理算法进行分析;2. 物体定位与辨识:通过图像处理算法对所捕捉的图像进行处理,准确地定位和识别工作环境中的物体;3. 动作规划与控制:根据物体的位置和属性,通过机器学习技术生成相应的动作规划,并控制机器人执行抓取动作;4. 智能决策:根据环境中的变化和实时反馈,优化决策,实现自主学习和智能优化;5. 准确抓取:通过智能视觉识别与抓取系统,工业机器人可以实现准确的抓取动作,提高生产效率和质量。
二、智能视觉识别与抓取系统的优势相比传统的编程方式,智能视觉识别与抓取系统具有诸多优势,主要体现在以下几个方面:1. 灵活性:传统的编程方式需要人工编写复杂的代码,并且在生产环境中容易受到环境变化的影响。
而智能视觉识别与抓取系统可以根据不同的工作环境和任务需求进行灵活调整,具有更好的适应性和扩展性;2. 自主学习:智能视觉识别与抓取系统可以通过机器学习技术进行自主学习,在工作过程中不断优化决策和动作规划,提高工业机器人的智能化水平;3. 高精度:传统编程方式容易受到各种因素的干扰和误差累积,导致精度不高。
而智能视觉识别与抓取系统通过图像处理算法和自动校正技术,可以实现更高的精度和稳定性;4. 安全性:智能视觉识别与抓取系统具有较高的安全性,可以通过实时监测和反馈机制保障工业机器人的运行安全;5. 操作简便:相比传统编程方式繁琐的操作流程,智能视觉识别与抓取系统提供了更加简便易行的操作界面,降低了人机交互的学习成本。
机器人视觉中的目标追踪技术研究随着技术的不断发展,机器人已经逐渐成为人们生活中不可或缺的一部分。
机器人拥有的关键技术之一就是视觉技术。
视觉技术可以帮助机器人从图像、视频信号中获取信息,经过处理后用于机器人的行为控制。
目标追踪技术是机器人视觉技术中的一个重要领域。
目标追踪技术可以帮助机器人在处理图像信息时自动捕捉目标的位置、姿态等信息,实现机器人的自动控制。
一、目标追踪技术的研究现状目前,机器人视觉领域的研究已经取得了许多成果,目标追踪技术也是其中之一。
目标追踪技术主要是通过对目标的图像信息进行分析,确定目标的位置、姿态等信息,使机器人能够自动跟随或追踪目标。
在目标追踪技术的研究中,首先需要解决的问题就是图像检测与分割。
图像检测与分割技术可以帮助机器人准确地识别出目标,将目标从图像中分离出来。
现在已经有很多图像检测与分割技术,例如基于深度学习的目标检测算法。
这些算法可以对目标进行准确的检测和分割,使机器人能够更容易地追踪目标。
其次,目标跟踪技术也需要解决的问题是对目标的特征提取和匹配。
目标的特征提取可以帮助机器人准确地判断出目标,而匹配技术可以帮助机器人对目标进行更精准的追踪。
目前,在目标跟踪技术中,主要采用的是基于卷积神经网络(CNN)的特征提取和匹配技术。
这些算法可以帮助机器人实现更精准、更快速的目标跟踪。
此外,为了提高机器人视觉技术的实时性和稳定性,目标追踪技术还需要解决图像处理的速度和精度问题。
目前,已经有很多优秀的目标追踪算法,例如Mean Shift、卡尔曼滤波、粒子滤波等,这些算法可以帮助机器人更快速、更准确地追踪目标,并且在复杂环境下也能保持稳定。
二、机器人视觉中的目标追踪技术应用在现实中,机器人视觉中的目标追踪技术已经得到了广泛应用。
例如,在机器人监控系统中,目标追踪技术可以帮助机器人对用户行为进行追踪,从而提高监控系统的反应速度和准确性。
在工业生产领域中,机器人也可以利用目标追踪技术实现自动化生产,从而提高工业生产的效率和质量。
I.引言机器人抓取运动目标是指机器人基于内部控制系统的控制,完成运动目标的跟踪和抓取,是智能机器人的一个前沿应用课题,在工业、航天和娱乐等领域有良好的应用前景。
在运动目标的捕捉中,一方面,机器人手爪必须快速跟踪并接近目标;另一方面必须能够感知环境以避开可能的障碍,其中状态反馈和路径规划需要很高的实时性和抗干扰能力。
此外,系统还受到动力学约束、关节几何约束等限制,而这一切都必须在实时条件下完成。
抓取运动目标技术在航空航天、工业生产、遥感技术、军事技术、特殊环境作业等多领域有着广泛的应用。
该技术的研究最典型的应用就在于太空卫星捕捉机器人,众所周知由宇航员来接近和捕捉正在旋转的卫星很危险而且困难,从而使人们意识到应该使用机器人进行太空服务,近年来越来越多的机器臂装配到了航天设备上。
此外,抓取运动目标的技术还可以应用在工业生产过程中抓取装配线传送带上正在运动的零部件;球类机器人(如:足球机器人,排球机器人等);太空、深海等场合的自动对接和作业。
对于机器人抓取运动目标,其末端机械手的动作规划和目标检测等问题就需要传感技术与机器人控制技术的完美结合。
目前,对于目标状态的测取一般采用图像传感(CCD摄像机),但是单视觉反馈有着它自身的缺陷,单摄像机模型往往能够获得较为精确的平面位置信息,而不能获得精确的深度信息。
为此,在状态测取时,一般采用多摄像机模型或摄像机与位置传感器相结合模型。
对于抓取运动目标动作规划目前一般存在有三种方法:直接瞄准法、比例导引法、以及预测-规划-执行( Prediction Planning and Execution,PPE) 方法。
后文将具体讨论以上内容。
II.系统组成下图是一个典型的机器人抓取运动目标的系统方框图。
抓取运动咪表的机器人与一般的机器人相比,其操作对象大多为状态参数不确定的运动目标,同时机器人与目标之间的接触速度较高。
因此必须着重研究以下问题: 实时状态测取、运动路径规划、机器人运动控制。
机器人视觉伺服控制技术研究机器人技术是近年来得到快速发展的一项技术,利用计算机和机械等技术实现无人操作或自主操作是其主要应用之一。
在机器人技术应用中,视觉伺服控制技术被广泛应用和研究。
视觉伺服控制技术是利用视觉信息来控制机器人的运动,具有高精度、高速度和高灵敏度等特点,已成为机器人技术和工业自动化领域中的一个重要研究方向。
一、机器人视觉伺服控制技术的基本原理传统机器人控制方法通常是基于传感器和控制器的结合,但是这种方法往往需要复杂的算法和控制机制,导致其不稳定性和误差较大。
而视觉伺服控制技术就是利用机器视觉技术来获取机器人的运动和姿态信息,将其反馈到机器人控制器中进行处理和调整,实现更加精确和高效的控制操作。
视觉伺服控制技术的基本原理是将机器视觉技术应用于机器人控制中,利用机器人自身装备的摄像头、光学传感器等设备获取环境信息和机器人状态。
通过对图像和数据进行处理和分析,得到机器人与环境之间的距离、方向和速度等信息,从而实现机器人位置姿态的控制。
二、机器人视觉伺服控制技术的应用视觉伺服控制技术在机器人技术中有着广泛的应用,其中最主要的是在工业自动化领域中的应用。
工业机器人起初主要是用来实现物体的精准处理和组装等作业,而视觉伺服控制技术的应用则将机器人的控制精度和速度提高到了一个新的水平,使其可以更加精准、高效地完成装配、加工等工作。
此外,视觉伺服控制技术还广泛应用于智能安防、智能家居、医疗机器人、无人驾驶等领域。
智能安防领域中,利用机器视觉技术和视觉伺服控制技术可以实现智能视频监控和入侵检测等功能;在智能家居领域中,机器人可以通过视觉伺服控制技术完成物品清理、家庭安全监测等任务;在医疗机器人领域中,机器人可以通过视觉识别技术和视觉伺服控制技术实现手术、治疗等工作;在无人驾驶领域中,机器人可以通过视觉伺服控制技术获得道路和交通信息,实现车辆的自动操作。
三、机器人视觉伺服控制技术的发展趋势随着技术的不断发展和应用场景的不断扩大,机器人视觉伺服控制技术也在不断升级和改进。
基于机器视觉的机器人抓取与操作技术研究摘要:机器视觉技术在近年来得到了广泛应用,尤其在机器人领域中展现了巨大的潜力。
机器人的抓取与操作技术是机器人应用领域的关键技术之一,而基于机器视觉的机器人抓取与操作技术则是实现机器人智能化的重要手段之一。
本文将介绍基于机器视觉的机器人抓取与操作技术的研究进展、应用领域和未来发展方向,并对其可能的挑战进行探讨。
1. 引言机器人的抓取与操作技术是机器人应用领域中的关键技术之一。
传统的机器人抓取与操作技术主要依靠预先设定的规则和参数来完成特定的操作任务,缺乏灵活性和智能性。
而基于机器视觉的机器人抓取与操作技术则能够通过感知周围环境并获取图像信息,实现对目标物体的准确定位和抓取。
因此,基于机器视觉的机器人抓取与操作技术被广泛应用于工业自动化、物流、农业、医疗等领域。
2. 基于机器视觉的机器人抓取技术的研究进展基于机器视觉的机器人抓取技术的研究主要包括目标检测与定位、机器人抓取策略和抓取控制系统三个方面。
2.1 目标检测与定位机器人抓取任务的首要步骤是准确地检测和定位目标物体。
传统的目标检测与定位方法主要依赖于图像特征提取和特征匹配,但在复杂背景下容易受到光照、噪声和视角变化的干扰。
近年来,基于深度学习的目标检测与定位方法取得了显著的突破,如目标检测网络YOLO 和Faster R-CNN。
这些方法能够快速且准确地检测和定位目标物体,为后续的抓取策略提供了可靠的基础。
2.2 机器人抓取策略机器人抓取策略是基于机器视觉的机器人抓取技术的核心内容之一。
抓取策略主要包括目标物体姿态估计、抓取点选择和抓取姿态规划等步骤。
目标物体姿态估计是指通过机器视觉技术来获取目标物体的姿态信息,如旋转角度和位置。
抓取点选择是指确定机器人抓取目标物体时的接触点位置,以确保抓取的稳定性和安全性。
抓取姿态规划是指在确定了抓取点后,通过规划机器人的关节运动轨迹来实现精确的抓取操作。
当前的研究主要关注于如何提高抓取策略的鲁棒性和适应性,以适应复杂的场景和目标物体。
基于机器视觉和深度学习的目标识别与抓取定位研究一、本文概述随着科技的快速发展,机器视觉和深度学习在多个领域中都展现出了巨大的潜力和应用价值。
特别是在工业自动化、机器人技术、航空航天、医疗诊断等领域,目标识别与抓取定位技术的精确性和效率性成为了决定性的因素。
本文旨在探讨基于机器视觉和深度学习的目标识别与抓取定位技术,分析其原理、方法、挑战以及未来的发展趋势,以期为相关领域的研究和实践提供有益的参考和启示。
本文首先介绍了机器视觉和深度学习的基本原理和技术背景,为后续研究提供理论基础。
然后,详细阐述了目标识别与抓取定位技术的实现过程,包括图像预处理、特征提取、目标分类、位置定位等关键步骤,以及相应的算法和模型。
本文还讨论了在实际应用中可能遇到的问题和挑战,如光照变化、遮挡问题、动态环境等,并提出了相应的解决方案和改进策略。
本文展望了基于机器视觉和深度学习的目标识别与抓取定位技术的未来发展趋势,包括技术优化、应用场景拓展、跨领域融合等方面。
本文希望通过深入研究和分析,为相关领域的研究者和实践者提供有价值的参考和借鉴,推动目标识别与抓取定位技术的不断发展和进步。
二、机器视觉与深度学习基础在探索基于机器视觉和深度学习的目标识别与抓取定位技术时,我们首先需要理解机器视觉和深度学习的基本原理。
机器视觉是一种通过图像和视频采集设备获取视觉信息,然后使用计算机算法进行解析和理解的技术。
它是人工智能的一个重要分支,主要涉及到图像预处理、特征提取和识别等步骤。
图像预处理是为了提高图像质量,减少噪声和干扰,增强图像中的有用信息。
特征提取则是从预处理后的图像中提取出关键信息,如边缘、角点、纹理等。
识别阶段则根据提取的特征,使用分类器或匹配算法对目标进行识别。
深度学习是机器学习的一个子领域,主要依赖于神经网络,特别是深度神经网络(DNN)和卷积神经网络(CNN)进行数据的表示和学习。
深度学习的核心在于通过构建深度神经网络模型,模拟人脑神经元的连接方式,对大量数据进行训练,学习数据的内在规律和表示。
《基于视觉引导的ABB机器人定位与抓取研究》一、引言随着人工智能和机器人技术的飞速发展,工业自动化已成为现代制造业的重要趋势。
其中,视觉引导技术在机器人技术中扮演着至关重要的角色。
本篇论文旨在研究基于视觉引导的ABB机器人定位与抓取技术,以提高机器人在工业生产中的自动化水平与工作效率。
二、背景及意义视觉引导技术是一种基于图像处理的定位和抓取技术,其重要性在工业自动化中日益凸显。
利用视觉引导,机器人可以实现对目标的快速、精确定位和抓取,从而提高生产效率、降低人力成本。
ABB机器人作为工业自动化领域的佼佼者,其视觉引导技术的应用具有广泛的前景和重要的研究价值。
三、相关技术综述3.1 视觉引导技术视觉引导技术主要依赖于图像处理技术,包括图像采集、预处理、特征提取、目标定位等步骤。
通过对图像的分析和处理,机器人可以实现对目标的精确识别和定位。
3.2 ABB机器人技术ABB机器人是一种高度智能化的工业机器人,具有强大的运动控制能力和灵活的编程能力。
其抓取技术主要依赖于机械臂和末端执行器,通过精确控制机械臂的运动,实现目标的抓取和放置。
四、基于视觉引导的ABB机器人定位与抓取技术研究4.1 视觉系统设计本研究采用先进的视觉系统,包括高清摄像头、图像处理器和光源等设备。
通过调整光源的角度和强度,确保图像的清晰度和对比度,从而提高目标的识别精度。
4.2 目标定位与识别利用图像处理技术,对采集的图像进行预处理和特征提取,实现对目标的定位和识别。
通过对比实际图像与标准图像的差异,计算出目标的精确位置和姿态。
4.3 ABB机器人运动控制根据计算出的目标位置和姿态,通过ABB机器人的运动控制算法,精确控制机械臂的运动,实现目标的抓取和放置。
同时,通过实时反馈机制,对机器人的运动进行监控和调整,确保抓取的准确性和稳定性。
五、实验与分析为了验证本研究的有效性,我们进行了多组实验。
实验结果表明,基于视觉引导的ABB机器人定位与抓取技术具有较高的精度和稳定性。
机器人视觉识别与抓取技术研究随着工业4.0的到来,机器人已经渗透到了诸多行业中,其发展成果也日益显著。
尤其是在机器人的视觉识别与抓取技术方面,近年来的研究进展非常迅速。
在本文中,我们将探讨机器人视觉识别与抓取技术的现状及其未来发展。
一、机器人视觉识别技术在工业领域,机器人的视觉识别技术主要应用于自动化生产线和质量控制等方面。
机器人视觉系统通常包含图像采集、图像处理和图像识别三个部分。
机器人的视觉识别与抓取技术需要采用高精度的3D视觉技术,能够在不同的光照条件下进行快速准确的定位。
而机器人的视觉识别系统主要通过集成感应器、计算机视觉和机器学习技术,实现物体的识别和定位。
目前,机器人的视觉系统已经可以实现多种物体的识别,包括但不限于:箱子、瓶子、零件、人体、加工中的工件等。
二、机器人抓取技术机器人抓取技术是机器人视觉识别技术的重要应用。
机器人抓取技术常常伴随着物体形状、物理特性的复杂性而变得异常麻烦。
幸运的是,新的算法和技术开发已经使得机器人的抓取能力大幅提高。
目前,机器人抓取技术主要包括可编程绳索、夹爪和气压式吸盘等多种方式。
可编程绳索是一种基于控制的抓取方式,由于能够根据物体的形状进行调整,因此常常被用于不规则物体的抓取。
夹爪机器人可以精确地抓取物体,比常规夹爪操作更精确可靠,具有很高的灵活性和通用性。
气压式吸盘机器人则能够快速、准确地抓取带有吸盘的物体。
三、机器人视觉识别与抓取技术的未来发展随着人工智能和机器学习技术的不断成熟,机器人视觉识别与抓取技术也会持续发展。
一方面,机器人视觉系统将会变得越来越智能化,能够自主识别和抓取各种形状的物体。
另一方面,随着机器人的普及和应用领域的拓展,机器人抓取技术的研究重点将会更加注重精度和安全性。
不难看出,未来机器人的视觉识别与抓取技术有着广阔的发展前景,它将会对工业生产和制造业的发展带来更为深远的影响。