杠杆动态平衡的几种类型演示教学
- 格式:doc
- 大小:136.00 KB
- 文档页数:5


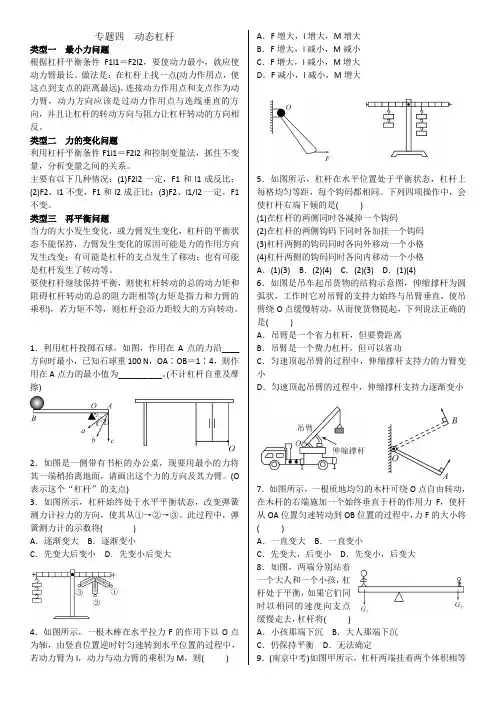
专题四动态杠杆类型一最小力问题根据杠杆平衡条件F1l1=F2l2,要使动力最小,就应使动力臂最长。
做法是:在杠杆上找一点(动力作用点,使这点到支点的距离最远),连接动力作用点和支点作为动力臂,动力方向应该是过动力作用点与连线垂直的方向,并且让杠杆的转动方向与阻力让杠杆转动的方向相反。
类型二力的变化问题利用杠杆平衡条件F1l1=F2l2和控制变量法,抓住不变量,分析变量之间的关系。
主要有以下几种情况:(1)F2l2一定,F1和l1成反比;(2)F2、l1不变,F1和l2成正比;(3)F2、l1/l2一定,F1不变。
类型三再平衡问题当力的大小发生变化,或力臂发生变化,杠杆的平衡状态不能保持,力臂发生变化的原因可能是力的作用方向发生改变;有可能是杠杆的支点发生了移动;也有可能是杠杆发生了转动等。
要使杠杆继续保持平衡,则使杠杆转动的总的动力矩和阻碍杠杆转动的总的阻力距相等(力矩是指力和力臂的乘积),若力矩不等,则杠杆会沿力距较大的方向转动。
1.利用杠杆投掷石球,如图,作用在A点的力沿____方向时最小,已知石球重100 N,OA∶OB=1∶4,则作用在A点力的最小值为__________。
(不计杠杆自重及摩擦)2.如图是一侧带有书柜的办公桌,现要用最小的力将其一端稍抬离地面,请画出这个力的方向及其力臂。
(O 表示这个“杠杆”的支点)3.如图所示,杠杆始终处于水平平衡状态,改变弹簧测力计拉力的方向,使其从①→②→③。
此过程中,弹簧测力计的示数将()A.逐渐变大B.逐渐变小C.先变大后变小D.先变小后变大4.如图所示,一根木棒在水平拉力F的作用下以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,若动力臂为l,动力与动力臂的乘积为M,则()A.F增大,l增大,M增大B.F增大,l减小,M减小C.F增大,l减小,M增大D.F减小,l减小,M增大5.如图所示,杠杆在水平位置处于平衡状态,杠杆上每格均匀等距,每个钩码都相同。
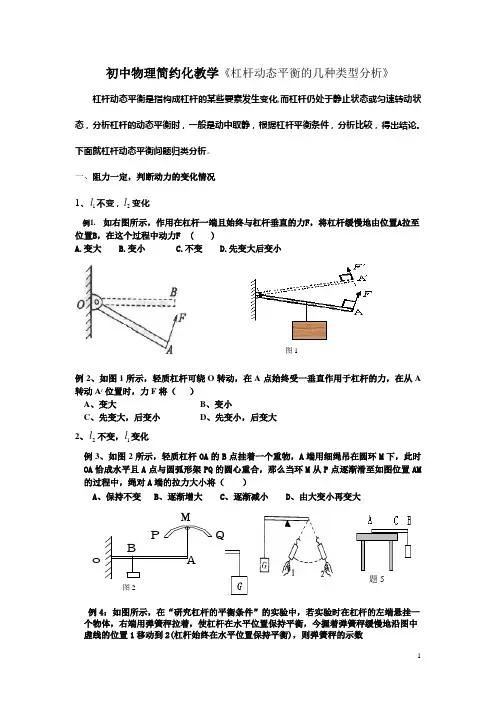
初中物理简约化教学《杠杆动态平衡的几种类型分析》杠杆动态平衡是指构成杠杆的某些要素发生变化,而杠杆仍处于静止状态或匀速转动状态,分析杠杆的动态平衡时,一般是动中取静,根据杠杆平衡条件,分析比较,得出结论。
下面就杠杆动态平衡问题归类分析。
一、阻力一定,判断动力的变化情况1、1l不变,2l变化例1. 如右图所示,作用在杠杆一端且始终与杠杆垂直的力F,将杠杆缓慢地由位置A拉至位置B,在这个过程中动力F ( )A.变大B.变小C.不变D.先变大后变小例2、如图1所示,轻质杠杆可绕O转动,在A点始终受一垂直作用于杠杆的力,在从A 转动A/ 位置时,力F将():如图所示,在“研究杠杆的平衡条件”的实验中,若实验时在杠杆的左端悬挂一个物体,右端用弹簧秤拉着,使杠杆在水平位置保持平衡,今握着弹簧秤缓慢地沿图中杠杆始终在水平位置保持平衡),则弹簧秤的示数图1PMQAA .不断增大B .先增大,后减小C .不断减小D .先减小,后增大3、1l 与2l 同时变化例5、如图4所示,一个直杠杆可绕轴O 转动,在直杆的中点挂一重物,在杆的另一端施加一个方向始终保持水平的力F ,将直杆从竖直位置慢慢抬起到水平位置过程中,力F 大小的变化情况是( )A 、一直增大B 、一直减小C 、先增大后减小 D、先减小后增大3、1l 与2l 同时变化,但比值不变例6、用右图所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物慢慢提升到一定高度的过程中,F 的大小将( )A 、保持不变B 、逐渐变小C 、逐渐变大D 、先变大,后变小二、动力与阻力不变,动力臂与阻力臂变化 例7、如图5所示,用一细线悬挂一根粗细均匀的轻质细麦桔杆,使其静止在水平方向上,O 为麦桔杆的中点.这时有两只蚂蚁同时从O 点分别向着麦桔杆的两端匀速爬行,在蚂蚁爬行的过程中麦桔杆在水平方向始终保持乎衡,则( ) A 、两蚂蚁的质量一定相等B 、两蚂蚁的爬行速度大小一定相等C 、两蚂蚁的质量与爬行速度大小的乘积一定相等D 、两蚂蚁对麦桔杆的压力一定相等三、动力臂与阻力臂不变,动力与阻力改变例8、如图(a )所示的杠杆是平衡的,在此杠杆支点两侧的物体下方分别加挂一个物体,如图(b )所示,那么,以下说法中正确的是( )A .杠杆仍然平衡B .杠杆可能平衡第6题图5 图4 FB GC .杠杆一定不能平衡D .杠杆是否平衡与加挂物体的质量多少无关九年级物理《杠杆》综合练习卷班级: 姓名: (2012-9-6)1.在___的作用下,能绕一__ _转动的__ __叫做杠杆.杠杆可以是直的,也可以是_ 的. 2.下列说法中正确的是( )A .杠杆都是直的硬棒B .力臂是力的作用点到支点的距离C .力臂是支点到力的作用线的距离D .杠杆的动力臂总是大于阻力臂 3、在下图中画出力F 1、F 2的力臂l 1、l 2。
杠杆科学教案-马毓蔓第一章:引言1.1 课程目标通过本章的学习,学生将了解杠杆的基本概念,掌握杠杆的分类和特点,并能够运用杠杆原理解决实际问题。
1.2 教学内容杠杆的定义与分类杠杆的五个要素杠杆的平衡条件1.3 教学方法采用讲解、演示和实验相结合的方式进行教学引导学生通过观察、思考和动手实践来理解杠杆原理1.4 教学资源教学PPT杠杆模型或实物实验器材(如尺子、钩码等)1.5 教学评估课堂问答:检查学生对杠杆定义和分类的理解实验报告:评估学生运用杠杆原理解决实际问题的能力第二章:杠杆的分类与特点2.1 课程目标通过本章的学习,学生将掌握杠杆的分类和特点,并能够区分不同类型的杠杆。
一等臂杠杆:动力臂等于阻力臂二等臂杠杆:动力臂等于阻力臂动力臂大于阻力臂的杠杆动力臂小于阻力臂的杠杆2.3 教学方法采用讲解和演示相结合的方式进行教学引导学生通过观察和比较来掌握杠杆的分类和特点2.4 教学资源教学PPT杠杆模型或实物2.5 教学评估课堂问答:检查学生对杠杆分类和特点的理解练习题:评估学生对不同类型杠杆的区分能力第三章:杠杆的平衡条件3.1 课程目标通过本章的学习,学生将掌握杠杆的平衡条件,并能够运用平衡条件解决实际问题。
3.2 教学内容杠杆的平衡条件公式:F1 L1 = F2 L2动力臂和阻力臂的定义力臂的计算方法采用讲解和实验相结合的方式进行教学引导学生通过观察和实验来理解杠杆的平衡条件3.4 教学资源教学PPT杠杆模型或实物实验器材(如尺子、钩码等)3.5 教学评估课堂问答:检查学生对杠杆平衡条件的理解实验报告:评估学生运用平衡条件解决实际问题的能力第四章:杠杆的应用4.1 课程目标通过本章的学习,学生将了解杠杆在实际生活中的应用,并能够运用杠杆原理解决实际问题。
4.2 教学内容杠杆在日常生活中的应用实例杠杆原理在工具和机械中的应用杠杆原理在人体运动中的作用4.3 教学方法采用讲解和实例分析相结合的方式进行教学引导学生通过观察和思考来了解杠杆的应用4.4 教学资源教学PPT实例图片或视频4.5 教学评估课堂问答:检查学生对杠杆应用的了解实例分析报告:评估学生运用杠杆原理解决实际问题的能力5.1 课程目标通过本章的学习,学生将回顾和巩固杠杆的基本概念、分类和平衡条件,并能够运用杠杆原理解决实际问题。
杠杆的三种平衡状态
杠杆的三种平衡状态是:稳定平衡、不稳定平衡和中立平衡。
1. 稳定平衡:当杠杆处于稳定平衡状态时,它能够保持在静止位置,即使有轻微的干扰也能够回到原来的平衡位置。
这意味着在稳定平衡状态下,杠杆的重心位于支点下方,因此它具有稳定性。
2. 不稳定平衡:当杠杆处于不稳定平衡状态时,它处于一个非常不稳定的位置,即使有轻微的干扰也会导致杠杆失去平衡。
这种平衡状态下,杠杆的重心位于支点上方,因此它缺乏稳定性。
3. 中立平衡:当杠杆处于中立平衡状态时,它处于一个没有倾向于回到原来平衡位置的状态。
在这种情况下,杠杆的重心正好位于支点上,使得它不受任何外力的干扰。
杠杆动态平衡的几种
类型
杠杆动态平衡的几种类型
杠杆动态平衡是指构成杠杆的某些要素发生变化,而杠杆仍处于静止状态或匀速转动状态,分析杠杆的动态平衡时,一般是动中取静,根据杠杆平衡条件,分析比较,得出结论。
下面就杠杆动态平衡问题归类分析。
一、
阻力一定,判断动力的变化情况
1、1l 不变,2l 变化
例1、如图1所示,轻质杠杆可绕O 转动,在A 点始终受一垂直作用
于杠杆的力,在从A 转动A /
位置时,力F 将( )
A 、变大
B 、变小
C 、先变大,后变小
D 、先变小,后变大 分析:变,2l 增大,由G l l F 1
2
,F 过程中,2l 减小,所以F 减小。
2、2l 不变,1l 变化
例2、如图2所示,轻质杠杆着一个重物,A 时OA 恰成水平且A 图
重合,那么当环M 从P 点逐渐滑至Q 点的过程中,绳对A 端的拉力大小将( )
A 、保持不变
B 、逐渐增大
C 、逐渐减小
D 、由大变小再变大
分析:当M 点从P 点滑至Q 点的过程中,我们分两个过程分析,一是从P 点滑至竖直位
置,动力臂1l 逐渐增大(同学们不妨作出这两点的动力臂),由G l l F 1
2
知F 逐渐变小; 二是从竖直位置到Q 点,动力臂1l 逐渐减小,所以F 又逐渐增大。
故选D 。
3、1l 与2l 同时变化,但比值不变
例3、用右图3所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物
慢慢提升到一定高度的过程中,F 的大小将( )
A 、保持不变
B 、逐渐变小
C 、逐渐变大
D 、先变大,后变小
分析::F 始终竖直向下,与阻力作用线平行,分别作出F
与G 的力臂1l 和2l ,构建两个相似
图B
G
三角形(同学们不妨在图中作出),可以看出,
OA
OB l l =21为
定值,由杠杆平衡条件,21Gl Fl =,得G l l F 1
2
=,所以,F 大小不变。
4、1l 与2l 同时变化
例4、如图4所示,一个直杠杆可绕轴O 转动,在直杆的中点挂一重物,
在杆的另一端施加一个方向始终保持水平的力F ,将直杆从竖直位置
慢慢抬起到水平位置过程中,力F 大小的变化情况是( )
A 、一直增大
B 、一直减小
C 、先增大后减小
D 、先减小后增大 分析:将直杆从竖直位置慢慢抬起到水平位置过程中,1l 变小,2l 变大,由G l l F 1
2
=
知,F 一直在增大。
二、动力与阻力不变,动力臂与阻力臂变化
例5、如图5所示,用一细线悬挂一根粗细均匀的轻质细麦
桔杆,使其静止在水平方向上,
O 为麦桔杆的中点.这时有两只蚂蚁同时从O 点分别向着麦
桔杆的两端匀速爬行,在蚂蚁
爬行的过程中麦桔杆在水平方向始终保持乎衡,则
( )
图
A 、两蚂蚁的质量一定相等
B 、两蚂蚁的爬行速度大小一定相等
C 、两蚂蚁的质量与爬行速度大小的乘积一定相等
D 、两蚂蚁对麦桔杆的压力一定相等
分析: 蚂蚁爬行的过程中麦桔杆始终保持乎衡,有
2211l G l G =,即t v G t v G 2211=,所以2211v G v G =。
故选
C 。
三、动力臂与阻力臂不变,动力与阻力改变
例6、如图6所示的轻质杠杆,AO 小于BO .在A 、B 两端悬挂重物(同种物质)G 1和G 2后杠杆平衡.若将G 1和G 2同时浸没到水中则( )
A 、杠杆仍保持平衡
B 、杠杆的A 端向下倾斜
C 、 杠杆的B 端向下倾斜
D 、无法判断
分析:在空气中,杠杆平衡,故有OB G OA G 21=; G 1和G 2同时浸没到水中,有
OB g
G
g OB G OA g G g
OA G OB gV G OA gV G 物水物水排水排水)()ρρρρρρ22112211(+--=---0=,说明杠杆仍然平衡。
故选A 。
图5
图。