直驱式永磁同步风力发电机组的建模与仿真
- 格式:pdf
- 大小:585.82 KB
- 文档页数:6
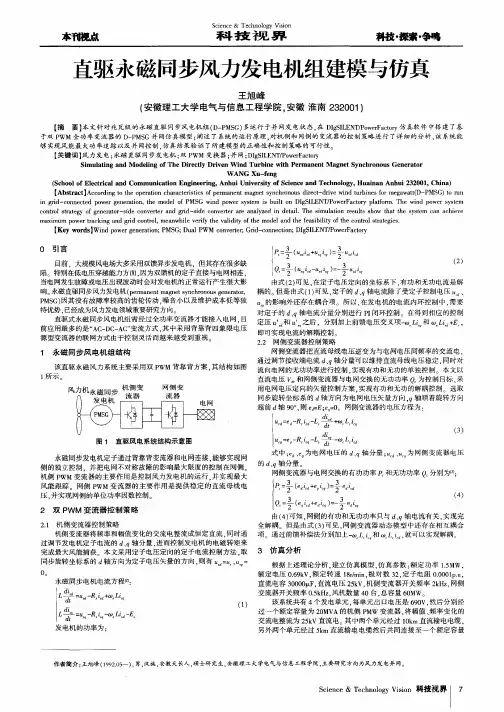
风力发电系统模型搭建与仿真分析采用小型永磁同步电机分析模型并且忽略其磁饱和度。
永磁发电机的数学模型如下:(3-8)代表永磁发电机在d 轴流过的电流,u d代表发电机在d 轴上的电压,L d 代表永磁式中id发电机在d 轴上的电感。
i q 代表永磁发电机在q 轴流过的电流,u q 代表发电机在q 轴上的电压,L q 代表永磁发电机在q 轴上的电感。
发电机角速度是①e ,发电机定子电阻是R a ,发电机的电磁转矩是T e 。
发电机永磁体磁链是Ψ。
当转子表面装有磁铁时,有效气隙可视为常数。
这是因为永磁材料相对磁导率大概一致[55] 。
所以d轴与q轴同步电感一致,即L d =L q =L 化简为:(3-9)其中T与成i q 正比。
如果发电机电磁转矩变大,系统中的定子电流也会随之变大,e进而对定子电流进行控制,使得发电机电磁转矩与风力涡轮输出转矩T 均衡,实现最大功率输出。
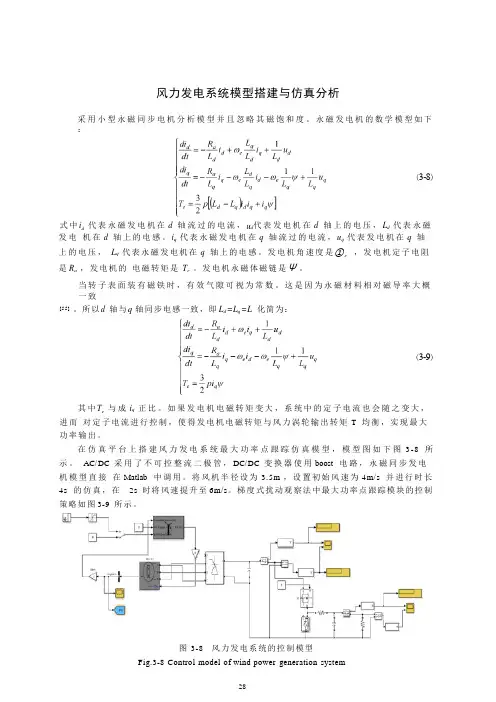
在仿真平台上搭建风力发电系统最大功率点跟踪仿真模型,模型图如下图3-8 所示。
AC/DC 采用了不可控整流二极管,DC/DC 变换器使用boost 电路,永磁同步发电机模型直接在Matlab 中调用。
将风机半径设为3.5m ,设置初始风速为4m/s 并进行时长4s 的仿真,在2s 时将风速提升至6m/s。
梯度式扰动观察法中最大功率点跟踪模块的控制策略如图3-9 所示。
图3-8 风力发电系统的控制模型Fig.3-8 Control model of wind power generation system28图 3-9 风力发电最大功率跟踪模块Fig.3-9 Wind power generation maximum power tracking module永磁同步电机参数情况如下表 3-1 所示。
表 3-1 永磁同步电机参数Tab.3-1 Parameter of synchronous machine名称参数大小额定转速(rad/s ) 40 转动惯量(kg/m 2) 0. 189 定子绕组电阻 (Ω) 0.05 定子绕组电感( m H )7. 15 极对数 34 磁链(Wb )0. 1892风力发电系统最大功率跟踪仿真曲线如图 3-10 和 3-11 所示。

直驱式永磁同步风力发电机组建模及其控制策略一、本文概述随着全球能源需求的持续增长和环境保护的日益紧迫,风力发电作为一种清洁、可再生的能源形式,正受到越来越多的关注。
直驱式永磁同步风力发电机(Direct-Drive Permanent Magnet Synchronous Wind Turbine Generator, DDPMSG)作为一种新型风力发电技术,以其高效率、高可靠性以及低维护成本等优点,逐渐成为风力发电领域的研究热点。
本文旨在对直驱式永磁同步风力发电机组的建模及其控制策略进行深入研究。
文章将介绍直驱式永磁同步风力发电机的基本结构和工作原理,为后续建模和控制策略的研究奠定基础。
接着,文章将详细阐述直驱式永磁同步风力发电机组的数学建模过程,包括机械部分、电气部分以及控制系统的数学模型,为后续控制策略的设计提供理论支持。
在控制策略方面,本文将重点研究直驱式永磁同步风力发电机组的最大功率点跟踪(Maximum Power Point Tracking, MPPT)控制和电网接入控制。
最大功率点跟踪控制旨在通过调整发电机组的运行参数,使风力发电机组在不同风速下都能保持最佳运行状态,从而最大化风能利用率。
电网接入控制则关注于如何确保发电机组在并网和孤岛运行模式下的稳定运行,以及如何在电网故障时实现安全可靠的解列。
本文还将探讨直驱式永磁同步风力发电机组的控制策略优化问题,以提高发电机组的运行效率和稳定性。
通过对控制策略进行优化设计,可以进一步减少风力发电机组的能量损失,提高风电场的整体经济效益。
本文将对直驱式永磁同步风力发电机组的建模及其控制策略进行总结,并展望未来的研究方向和应用前景。
通过本文的研究,可以为直驱式永磁同步风力发电机组的实际应用提供理论指导和技术支持,推动风力发电技术的持续发展和优化。
二、直驱式永磁同步风力发电机组的基本原理直驱式永磁同步风力发电机组(Direct-Drive Permanent Magnet Synchronous Wind Turbine Generator,简称DD-PMSG)是一种将风能直接转换为电能的装置,其基本原理基于风力驱动、机械传动、电磁感应和电力电子控制等多个方面。
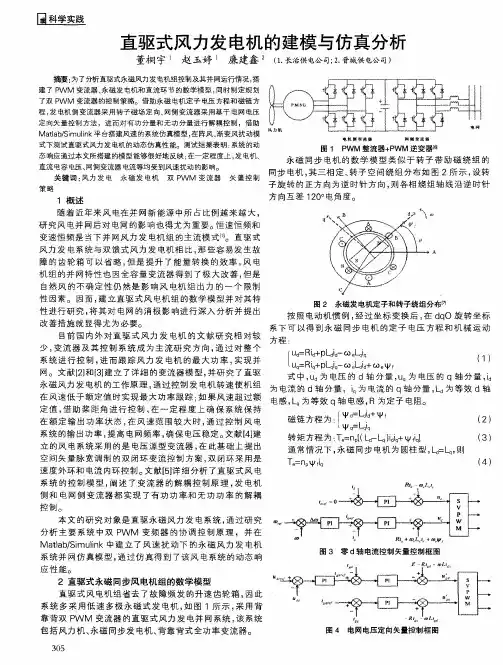
永磁直驱式变桨距风力发电机组的建模与控制1 引言永磁直驱式风力发电机组是我国风力发电机组的主流机型之一。
永磁风力发电机通过增加极对数,降低发电机转速,从而能够与风力机直接相连,取消了增速齿轮箱。
由于没有传统风力发电系统故障率很高的齿轮箱,直驱式风力发电系统稳定性和效率大大提高,且有效地抑制了噪声,具有比较广泛的市场应用前景。
图1 风力发电系统结构2 永磁直驱式并网型变桨距风力发电机组的结构永磁同步发电机的同步速较低,输出电压较低。
考虑到电网电压较高,电网与电机之间的能量变换装置,必须要有较大幅度的升压能力。
考虑到变压器体积较大,实际系统中,发电机组运送到塔顶成本较高,所以本文采取方法是直流母线侧先升压再进行并网逆变。
本文采用的机组方案如图1所示。
图2 桨距调节控制系统3 风力机的建模风力机建模一般只考虑其风能利用系数而忽略风力机的空气动力学过程。
本文即采用风力机的风能利用系数来建立其仿真模型。
图3 机侧电流内环控制系统风力机仿真模型的建立主要基于以下三个方程:(1)这里Cp-λ曲线采用文献[1]中给出的公式:(2)其中: (3)采用c1=,c2=116,c3=,c4=5,c5=21,c6=。
考虑到是发电机,建模时转矩要取反。
图4 网侧逆变器电流内环控制系统4 控制系统的设计桨距调节控制系统的设计当系统存在显著的不确定因素时,设计高精度的控制系统,必须研究控制系统在不确定情况下的鲁棒性。
PID控制器能够在很宽的运行条件下具有比较好的鲁棒性,并且形式简单,易于操作。
这里采用PID控制器来进行机组在高风速区的桨距调节。
变桨距风力发电系统在低风速区进行最大风能跟踪,节距角为零,即不进行变桨距调节。
图5 网侧逆变器电压外环控制系统风力机和发电机不经过增速齿轮箱而直接联接,传动系统的动态方程如下[4]:(4)式中,J是风轮转动惯量;ω是风轮转动的角速度;B是发电机的摩擦系数;Ta是风轮的气动转矩;Te是发动机获得的电磁转矩。
学习电本题目直驱永磁同步风电系统的控制与仿真随着环保意识的不断提高,风力发电逐渐成为人们向绿色低碳能源转型的重要手段。
而永磁同步风电机作为目前市场上最为先进的风力发电机之一,其高效、稳定的性能受到了越来越多人的关注。
然而,如何掌握永磁同步风电系统的控制和仿真技术,成为了摆在普通人眼前的首要问题。
一、什么是永磁同步风电机永磁同步风电机是一种利用风能来产生电能的机器。
其工作原理是利用风能将风叶产生的旋转力矩通过主轴传递给转子,驱动转子旋转,再将转子中的磁场与定子中的磁场互相作用,从而产生感应电动势,将其输出到电网上。
二、永磁同步风电机的控制方法永磁同步风电机的控制方法既包括传统的电磁场定子电压控制,也包括了新型的直驱控制。
传统的电磁场定子电压控制方法中,一般需要采用星形、三角形、六角形等不同的接线方式,通过控制电网侧的电压,实现对转子转矩和输出电压的控制。
这种方式操作简便,但容易出现电流谐波等问题。
而直驱控制则是利用功率可控器件对转子上的永磁体直接进行控制,这样就可以省去传统方法中的变频器和变压器等元件,从而减少了系统的复杂度,提高了效率。
不过由于直驱控制还需要用到高端的计算机控制技术,因此其对控制算法、控制器结构的要求也更高。
三、永磁同步风电机的仿真在实际工程应用当中,永磁同步风电机的控制和运行非常复杂,多种因素相互作用,相应的建模和仿真系统也变得越来越重要。
事实上,现在研究永磁同步风电机控制的学者和专家们都在利用MATLAB/Simulink、PSIM、PSCAD、FEAT-FEM等仿真软件来模拟永磁同步机的运行。
但是,图像仿真无法确保掌握永磁同步风电机的控制和运行。
因此,为了实现永磁同步风电机的重现和改进,还需要从实际应用出发,结合理论与实践,逐步完善永磁同步风电机的控制和仿真技术。
四、结语永磁同步风电系统控制与仿真是风力发电技术领域中的重要环节。
在这个领域,既有理论背景,也有实际操作经验,这意味着我们不仅需要”理性地思考“,还需”动手实践“,从而提高自身掌握永磁同步风电技术的能力。
作者简介:赵立邺(1985-),男,硕士,研究方向:风电建模、风电并网。
收稿日期:2011-01-06基于Matlab/Simulink 直驱式永磁风力发电系统的建模与仿真赵立邺,孟镇(沈阳农业大学信息与电气工程学院,沈阳110161)摘要:直驱式风力发电系统不需要电励磁、噪声小、维护费用低、控制简单,在风力发电系统中越来越受到欢迎。
在Matlab/Simulink 环境下,建立了直驱式永磁同步发电机的风力发电系统仿真模型,模型通过对风速、风力机、永磁同步发电机、全功率变流器进行理论分析实现模型搭建,最终建成整个风力发电系统模型。
仿真结果表明,系统能够在不同风速下稳定运行,最终输出的电压波形近似正弦,谐波含量小。
关键词:直驱;永磁同步发电机;Matlab/Simulink ;仿真中图分类号:TM315文献标识码:A文章编码:1672-6251(2011)02-0030-03Modeling and Simulation of Direct-driver Permanent Wind PowerSystem Based on Matlab/SimulinkZHAO Liye,MENG Zhen(Information and Electric Engineering College of Shenyang Agricultural University,Shenyang 110161)Abstract:Direct -drive wind power generation systems become popular with the advantages of without the need for electricity excitation,low noise,low maintenance costs,simple control,etc.Based on Matlab/Simulink,the wind power system simulation model with Direct -drive permanent magnet synchronous generator was established in this paper.In the model of wind power generation system,by the analysis of the wind speed,wind turbines and permanent magnet synchronous generator,the whole power converters,the wind power generation system model was developed.Simulation results showed that the system can run in the stable way under different wind speeds,and the final output voltage waveform was approximate to sine with small harmonic content.Key words:direct-drive;permanent magnet synchronous generator;Matlab/Simulink;simulation农业网络信息AGRICULTURE NETWORK INFORMATION·研究与开发·2011年第2期风能作为一种无污染、可持续发展的能源越来越受到人类的重视。
直驱式永磁风力发电机机侧PWM整流器的建模与仿真张婷婷;吴新开;刘洋;张敏海【摘要】采用等效电路的方法,建立了包括风力机、发电机侧PWM整流器在内的直驱式永磁风力发电机的机侧数学模型,应用坐标变换将三相静止坐标系上的数学模型转化成了d-q旋转坐标系上的数学模型.采用电流内环和电压外环的双闭环控制策略,并利用Matlab/Simulink软件平台搭建了系统的仿真模型并进行仿真.仿真结果证明了机侧功率因数控制的可行性与有效性.【期刊名称】《电气传动自动化》【年(卷),期】2012(034)001【总页数】5页(P35-39)【关键词】直驱永磁同步风力发电机组;坐标变换;数学建模;Simulink【作者】张婷婷;吴新开;刘洋;张敏海【作者单位】湖南科技大学信息与电气工程学院,湖南湘潭411201;湖南科技大学信息与电气工程学院,湖南湘潭411201;湖南科技大学信息与电气工程学院,湖南湘潭411201;湖南科技大学信息与电气工程学院,湖南湘潭411201【正文语种】中文【中图分类】TM3151 引言电力供需矛盾随着人口膨胀和经济的高速发展日趋突出,能源和环境问题已成为当今世界面临的重大问题[1]。
开发新能源和发展可再生能源,实现经济可持续发展,已成为人们的共识。
近几年来,风力发电的发展不断超越其预期的发展速度。
然而,风电在电网中的贡献率难以超过10%[2]。
国内风力发电机主要有直驱永磁风机和双馈风机两种,两者的最大区别在于不同的传动、发电结构,相对于双馈风机,直驱永磁风机具有电网兼容性更强、维护成本更低、噪音更低、效率更大、更能适应低风速和能耗少等优点[3]。
此外,直驱永磁风机的应用对于我国具有更加重要的意义,因为我国低风速的三类风区大约占到全部风能资源的50%左右,更适合使用永磁直驱式风电机组。
直驱型风力发电机组主要包括风力机、永磁同步发电机(PMSG)、电力电子变流系统和控制系统等。
其基本结构如图1所示。
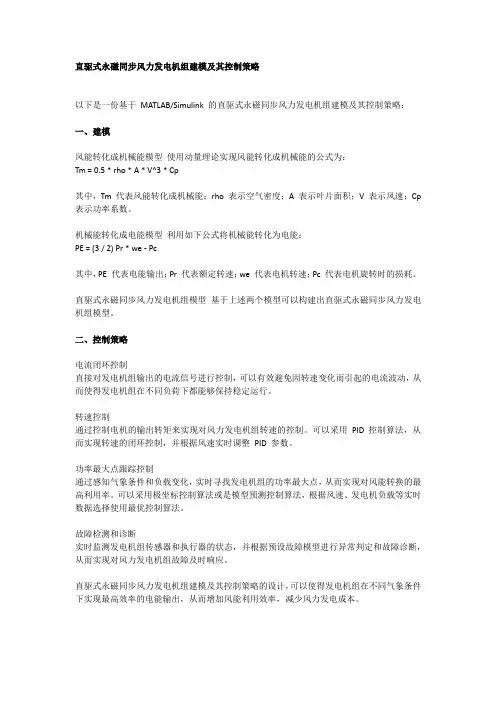
直驱式永磁同步风力发电机组建模及其控制策略以下是一份基于MATLAB/Simulink 的直驱式永磁同步风力发电机组建模及其控制策略:一、建模风能转化成机械能模型使用动量理论实现风能转化成机械能的公式为:Tm = 0.5 * rho * A * V^3 * Cp其中,Tm 代表风能转化成机械能;rho 表示空气密度;A 表示叶片面积;V 表示风速;Cp 表示功率系数。
机械能转化成电能模型利用如下公式将机械能转化为电能:PE = (3 / 2) Pr * we - Pc其中,PE 代表电能输出;Pr 代表额定转速;we 代表电机转速;Pc 代表电机旋转时的损耗。
直驱式永磁同步风力发电机组模型基于上述两个模型可以构建出直驱式永磁同步风力发电机组模型。
二、控制策略电流闭环控制直接对发电机组输出的电流信号进行控制,可以有效避免因转速变化而引起的电流波动,从而使得发电机组在不同负荷下都能够保持稳定运行。
转速控制通过控制电机的输出转矩来实现对风力发电机组转速的控制。
可以采用PID 控制算法,从而实现转速的闭环控制,并根据风速实时调整PID 参数。
功率最大点跟踪控制通过感知气象条件和负载变化,实时寻找发电机组的功率最大点,从而实现对风能转换的最高利用率。
可以采用极坐标控制算法或是模型预测控制算法,根据风速、发电机负载等实时数据选择使用最优控制算法。
故障检测和诊断实时监测发电机组传感器和执行器的状态,并根据预设故障模型进行异常判定和故障诊断,从而实现对风力发电机组故障及时响应。
直驱式永磁同步风力发电机组建模及其控制策略的设计,可以使得发电机组在不同气象条件下实现最高效率的电能输出,从而增加风能利用效率,减少风力发电成本。
永磁直驱风力发电机建模报告(改4)一、按变流器拓扑分类1、不可控整流+逆变器拓扑图1 不控整流+电压源型逆变器不控整流+逆变器构成的拓扑结构简单, 由二极管整流电路将PMSG 发出的交流电转变为直流电,然后由电压源型逆变器VSI转变为交流电, 送入电网。
由不控整流得到的直流侧电压随输入而变化, 通过全控型器件构成VSI, 可以通过改变调制比来实现并网电压频率和幅值恒定; 这种拓扑可以进一步提高开关频率, 减小谐波污染, 灵活调节输出到电网的有功功率和无功功率, 从而调节PMSG 的转速, 使其具有最大风能捕获的功能; 缺点是不能直接调节发电机电磁转矩, 动态响应较慢, 不控整流会造成定子电流谐波含量较大, 会增大电机损耗和转矩脉动, 并且当风速变化范围较大时, VSI 的电压调节作用有限。
2、不控整流+DC /DC 变换+逆变拓扑通过增加DC/DC变换器, 可以实现输入侧的功率因数校正( PFC) , 提高发电机的运行效率; 同时当风速变化时, 不控整流得到的电压也在变化, 而通过DC/DC 变换器的调节可以保持直流侧电压的稳定, 并能对PMSG 的电磁转矩和转速进行控制, 实现变速恒频运行, 使其具有最大风能捕获功能。
3、背靠背双PWM变换器拓扑发电机定子通过背靠背变流器和电网连接。
发电机侧PWM 变换器通过调节定子侧的d 轴和q 轴电流,控制发电机的电磁转矩和定子的无功功率(无功设定值为0),使发电机运行在变速恒频状态,额定风速以下具有最大风能捕获功能;网侧PWM 变换器通过调节网侧的d 轴和q 轴电流,保持直流侧电压稳定,实现有功和无功的解耦控制,控制流向电网的无功功率,通常运行在单位功率因数状态,此外网侧变换器还要保证变流器输出的THD 尽可能小,提高注入电网的电能质量。
二、 机组各部分数学模型(一) 背靠背拓扑1、风速模型风速模型是进行风力发电研究的源参数。
自然界的风,并不是由单一元素构成的,在考虑风的组成时,可根据风电场实测风速数据,做出各种风速出现的概率分布,由此确定几种典型的风函数。
直驱型风电机组动态建模及仿真分析随着可再生能源的发展,风电作为一种比较成熟的清洁能源形式,越来越广泛地应用于各种场合。
为了更好地控制和优化风力发电系统的性能,需要对风电机组进行动态建模及仿真分析工作。
直驱型风电机组是一种新型的风力发电机组,其动态行为与传统驱动型风电机组有所不同。
本文将以直驱型风电机组为对象,介绍其建模及仿真分析方法,并通过仿真实验验证其有效性。
首先,建立直驱型风电机组的动态数学模型是动态建模及仿真分析的基础。
直驱型风电机组的运动方程可以描述为:$J\ddot{\theta} + b\dot{\theta} = Tem - Tl$其中,$J$为转动惯量,$\theta$为转子转角,$b$为摩擦系数,$Tem$为电磁转矩,$Tl$为负载转矩。
直驱型风电机组和传统风电机组不同之处在于其电磁转矩是直接产生在转子上的,因此需要建立电磁转矩的模型,通常采用如下形式:$Tem =\frac{3}{2}P(\frac{L_{ms}}{L_{s}+L_{r}})^2i^2\sin\delta$其中,$P$为极对数,$i$为转子电流,$L_{ms}$为互感,$L_{s}$和$L_{r}$分别为定子和转子的漏感,$\delta$为电角度。
该模型应考虑到磁场饱和、非线性等因素的影响。
在建立动态数学模型的基础上,需要进行仿真分析以验证模型的有效性和性能。
仿真分析的目的是得到风电机组的动态响应和控制策略,并进行有效性和性能评估。
仿真分析的主要步骤包括仿真建模、仿真实验、仿真结果处理等。
在仿真建模过程中,应根据实际情况选取合适的仿真工具和方法。
通常采用MATLAB等软件进行动态仿真建模,以及PSCAD等软件进行电磁仿真模拟。
在模型输入、仿真条件等方面,应考虑到实际工作环境和实验条件的影响,以保证仿真结果的准确性和可靠性。
在仿真实验过程中,主要是对所建立的仿真模型进行动态响应测试和控制策略验证。
通过针对不同的工况和工作状态进行仿真实验,可以得到不同工况下的动态响应和控制策略,从而评估风电机组的有效性和性能。
摘要由于以石油、煤等的能源紧缺,同时这些传统能源对环境造成了越来越严重的污染,已经关系到人类的生存和发展问题,因而以风力发电为代表的新能源越来越受到人们的重视并且近年来有了较快的发展。
永磁直驱风力发电系统与传统的以异步电机的发电系统相比,不需经常维护,结构简单,发电效率较高,总体成本相对较低,这些优点使得可独立运行的中小型永磁直驱风力发电系统在农村和偏远地区有着很好应用前景。
本文主要工作如下:本文主要研究中小型永磁直驱风力发电控制系统,在理论上,根据中小型永磁直驱风力发电系统的数学模型,完成了基于Matlab/Simulink的仿真,该仿真包括变桨距控制系统的仿真和交直交变流系统的负载突变的仿真两部分。
由于永磁直驱风力发电系统所发出的电能为电压和频率的交流电,为得到恒压恒频的电能,本文进行了逆变控制系统的软硬件设计。
控制器采用PIC单片机并结合PWM 芯片SA4828,用IPM作为逆变输出,并采用LC滤波器将IPM输出波形滤成正弦波,电压反馈采用真有效值转换芯片AD736完成电压样任务。
调节方式采用了增量式PID 控制,同时为避免干扰采用了防脉冲干扰平均值滤波。
变桨距及偏航控制系统为风力发电系统可靠运行的关键,本文进行了变桨距及偏航控制系统的软硬件设计。
该控制器采用PIC单片机为核心,通过检测风速、转速、蓄电池电压、电流等量完成变桨距及偏航控制,同时为增强控制器的抗干扰性能,对输入及输出进行了光电隔离。
文中详细介绍了系统仿真和各系统的软硬件设计,并给出了仿真和试验的结果。
关键词:风力发电,永磁直驱,变桨距,逆变The Control System Simulation and Design of Low Speed PMGenerator Direct Driven by Wind TurbineAbstractThe energy such as petroleum and coal is in short supply, and simultaneously, the traditional energy caused more and more serious pollution to the environment, this has already concerned human survival and development problem. Wind power generation as a new energy is increasingly attraction interest and quickly development in recent years. The system of low speed PM generator direct driven by wind turbine which compares with the conventional wind power plants the generator is coupled with the turbine via a gearbox, does not have to maintain frequently, structure simple, electricity generation efficiency high, the overall cost relative is low. In the countryside and the remote districts the wind power generation is good application prospect.The main work of the thesis is as follow.This paper mainly studies the system of low speed PM generator direct driven by wind turbine. In theoretically, according to the wind power generation system mathematical model, the dynamic performance of the power generation system for different operation modes is simulated based on Matlab/Simulink.The output of the system of PM generator direct driven by wind turbine is variable voltage and variable frequency power. To get constant voltage and constant frequency energy that users need, the software and hardware of the inverter control system is designed. The inverter controller is adopted PIC single-chip-computer and PWM chip SA4828, and IPM as inverter, LC wave filter. The voltage feedback is got through the chip AD736 which accomplishes the task of sampling the voltage.To realize the reliable operation the wind power generation system, the software and hardware of the pitch and yaw control system designed. The controller uses PIC single-chip computer as central controller, which operates the system through measuring the wind speed, rotational speed, battery voltage and the charging current, etc. At the same time in order to strengthen the anti-interference performance of the controller, the input and output are isolated by the photo-electricity.The paper introduces the system simulation and software and hardware design in detail, and produces the simulation and the test result.Key Words:wind power generation, permanent magnet direct drive, pitch control, inverter目录摘要 (1)Abstract (1)1绪论 (1)1.1课题背景 (1)1.2风力发电的研究现状 (2)1.2.1恒速恒频恒与变速恒频风力发电系统 (2)1.2.2功率调节 (5)1.3永磁直驱风力发电趋势 (7)1.4课题的来源和研究内容 (8)2中小功率永磁直驱风力发电控制系统的设计和仿真 (9)2.1风力发电控制系统的结构原理 (9)2.2风力机的功率特性 (10)2.3永磁同步发电机的模型 (11)2.4控制策略 (11)2.5风力发电系统模型的建立 (12)2.6仿真结果 (15)2.6本章小结 (18)3逆变控制系统的硬件系统设计 (19)3.1逆变控制系统的结构 (19)3.2 SA4828简介 (20)3.2.1 SA4828的功能特点 (20)3.2.2 SA4828芯片的工作原理 (21)3.2.3 SA4828初始化寄存器的参数设定 (22)3.2.4控制寄存器的参数设定 (23)3.2.5参数计算 (24)3.3 IPM驱动电路的设计 (25)3.4电压采样电路的设计 (26)3.5 A/D转换 (29)3.6 滤波器设计 (30)3.7本章小结 (31)4逆变控制系统软件设计 (32)4.1 SPWM控制技术 (32)4.1.1 PWM调制法基本原理 (32)4.1.2 SPWM调制方法 (33)4.2数字PID控制算法 (34)4.2.1位置式PID控制算法 (35)4.2.2增量式PID控制算法 (36)4.3防脉冲干扰平均值滤波 (38)4.4主程序的设计 (38)4.5 A/D转换及滤波中断子程序的设计 (39)4.6实验结果 (40)4.7小结 (41)5变桨距及偏航控制系统的软硬件设计 (42)5.1风速和转速的测量 (42)5.1.1频率量的测量 (42)5.1.2风速的检测 (43)5.1.3风速仪信号的模拟 (45)5.1.4转速的测量 (45)5.2逻辑量的检测 (46)5.2.1充电电流的检测电路的设计 (47)5.2.2蓄电池的电压检测 (49)5.2.3桨距角及偏航极限位置的检测设计 (50)5.3控制系统的输出控制设计 (50)5.4显示电路的设计 (51)5.5主程序的设计 (52)5.6控制系统的抗干扰措施 (54)5.6.1硬件抗干扰措施 (54)5.6.2软件抗干扰措施 (56)5.7本章小结 (56)6结论 (57)参考文献 (58)在学研究成果 (62)致谢 (63)1绪论1.1课题背景现代社会的存在和发展离不开能源,而人类的发展对环境的破坏情况又非常严峻,所以能源和环境是当今人类生存和发展所要解决的紧迫问题。
基于Matlab_Simulink的永磁直驱风⼒发电机组建模和仿真研究-2发电机参数:极对数42;d 轴电抗1.704mL ;q轴电抗1.216mL ;转⼦磁通4.7442Wb ;转动惯量11258J 。
PI 参数:⽹侧电流内环d 轴(1.5、1),q 轴(0.5、37);⽹侧功率外环(0.0002、0.05);直流侧电压(2、120);机侧电流内环d 轴(-3、-24),q 轴(-3、-80);机侧功率外环(-3、-60)。
本仿真中风速由6m/s 变化到9m/s ,最后变化到12m/s 。
在最⼤风能捕获控制情况下,随着风速的变化,转⼦转速不断调整,以保持最佳叶尖速⽐,从⽽达到最⼤风能利⽤,图8为风速、转⼦转速、机械和电磁转矩变化曲线。
机侧电压电流变化如图9所⽰,在最⼤风能捕获模式下,电压和电流频率随着风速的增⼤⽽增⼤,电压幅值从260V 变化到400V 、540V ,电流幅值变化为380A 、850A 、1500A 。
电⽹侧及直流侧电压电流变化如图10所⽰,电⽹电压保持恒定,电流幅值随着风速的增⼤⽽增⼤变化范围为:168A 、580A 、1290A 。
直流侧电压在风速突变时有⼀个充电过程,电压升⾼,最⾼达到1320V ,经过⼤约0.1s的暂态过程后恢复到额定值1200V 。
永磁直驱发电机输⼊电⽹有功及⽆功功率如图11所⽰,有功功率随着风速的升⾼⽽不断变化,最后维持在1.1MW ,⽆功功率基本保持为零,波动幅值为5kW 。
实际输出有功功率与参考功率的⽐较如图12所⽰,在风速突变后参考功率⼤于实际输出功率,经过⼤约0.1s 的暂态过程后基本吻合。
永磁直驱发电系统机侧及⽹侧电压电流的d 、q 轴分量的变化如图13、14所⽰。
机侧电压d 、q 轴分量随着风速变化⽽变化,机侧电流采⽤零d 轴控制策略,所以d 轴分量维持为零,q 轴分量反映功率的变化。
⽹侧电压保持恒定,因为⽆功参考值为零,所以图11输⼊电⽹有功及⽆功功率Fig.11Active and reactive power input togrid图12输⼊电⽹有功功率与参考功率图Fig.12Active power input to grid and it ’sreference第27卷第9期电⽹与清洁能源图10电⽹侧及直流侧电压电流变化Fig.10Variation of voltage and current of grid and DC side 图9机侧电压电流变化Fig.9Variation of generator-side voltage andcurrent图8风速、转⼦转速、转矩变化Fig.8Variation of wind speed,rotor speed andtorqueClean Energy97电流q 轴分量为零。
摘要由于以石油、煤等的能源紧缺,同时这些传统能源对环境造成了越来越严重的污染,已经关系到人类的生存和发展问题,因而以风力发电为代表的新能源越来越受到人们的重视并且近年来有了较快的发展。
永磁直驱风力发电系统与传统的以异步电机的发电系统相比,不需经常维护,结构简单,发电效率较高,总体成本相对较低,这些优点使得可独立运行的中小型永磁直驱风力发电系统在农村和偏远地区有着很好应用前景。
本文主要工作如下:本文主要研究中小型永磁直驱风力发电控制系统,在理论上,根据中小型永磁直驱风力发电系统的数学模型,完成了基于Matlab/Simulink的仿真,该仿真包括变桨距控制系统的仿真和交直交变流系统的负载突变的仿真两部分。
由于永磁直驱风力发电系统所发出的电能为电压和频率的交流电,为得到恒压恒频的电能,本文进行了逆变控制系统的软硬件设计。
控制器采用PIC单片机并结合PWM 芯片SA4828,用IPM作为逆变输出,并采用LC滤波器将IPM输出波形滤成正弦波,电压反馈采用真有效值转换芯片AD736完成电压样任务。
调节方式采用了增量式PID 控制,同时为避免干扰采用了防脉冲干扰平均值滤波。
变桨距及偏航控制系统为风力发电系统可靠运行的关键,本文进行了变桨距及偏航控制系统的软硬件设计。
该控制器采用PIC单片机为核心,通过检测风速、转速、蓄电池电压、电流等量完成变桨距及偏航控制,同时为增强控制器的抗干扰性能,对输入及输出进行了光电隔离。
文中详细介绍了系统仿真和各系统的软硬件设计,并给出了仿真和试验的结果。
关键词:风力发电,永磁直驱,变桨距,逆变The Control System Simulation and Design of Low Speed PMGenerator Direct Driven by Wind TurbineAbstractThe energy such as petroleum and coal is in short supply, and simultaneously, the traditional energy caused more and more serious pollution to the environment, this has already concerned human survival and development problem. Wind power generation as a new energy is increasingly attraction interest and quickly development in recent years. The system of low speed PM generator direct driven by wind turbine which compares with the conventional wind power plants the generator is coupled with the turbine via a gearbox, does not have to maintain frequently, structure simple, electricity generation efficiency high, the overall cost relative is low. In the countryside and the remote districts the wind power generation is good application prospect.The main work of the thesis is as follow.This paper mainly studies the system of low speed PM generator direct driven by wind turbine. In theoretically, according to the wind power generation system mathematical model, the dynamic performance of the power generation system for different operation modes is simulated based on Matlab/Simulink.The output of the system of PM generator direct driven by wind turbine is variable voltage and variable frequency power. To get constant voltage and constant frequency energy that users need, the software and hardware of the inverter control system is designed. The inverter controller is adopted PIC single-chip-computer and PWM chip SA4828, and IPM as inverter, LC wave filter. The voltage feedback is got through the chip AD736 which accomplishes the task of sampling the voltage.To realize the reliable operation the wind power generation system, the software and hardware of the pitch and yaw control system designed. The controller uses PIC single-chip computer as central controller, which operates the system through measuring the wind speed, rotational speed, battery voltage and the charging current, etc. At the same time in order to strengthen the anti-interference performance of the controller, the input and output are isolated by the photo-electricity.The paper introduces the system simulation and software and hardware design in detail, and produces the simulation and the test result.Key Words:wind power generation, permanent magnet direct drive, pitch control, inverter目录摘要 (1)Abstract (1)1绪论 (1)1.1课题背景 (1)1.2风力发电的研究现状 (2)1.2.1恒速恒频恒与变速恒频风力发电系统 (2)1.2.2功率调节 (5)1.3永磁直驱风力发电趋势 (7)1.4课题的来源和研究内容 (8)2中小功率永磁直驱风力发电控制系统的设计和仿真 (9)2.1风力发电控制系统的结构原理 (9)2.2风力机的功率特性 (10)2.3永磁同步发电机的模型 (11)2.4控制策略 (11)2.5风力发电系统模型的建立 (12)2.6仿真结果 (15)2.6本章小结 (18)3逆变控制系统的硬件系统设计 (19)3.1逆变控制系统的结构 (19)3.2 SA4828简介 (20)3.2.1 SA4828的功能特点 (20)3.2.2 SA4828芯片的工作原理 (21)3.2.3 SA4828初始化寄存器的参数设定 (22)3.2.4控制寄存器的参数设定 (23)3.2.5参数计算 (24)3.3 IPM驱动电路的设计 (25)3.4电压采样电路的设计 (26)3.5 A/D转换 (29)3.6 滤波器设计 (30)3.7本章小结 (31)4逆变控制系统软件设计 (32)4.1 SPWM控制技术 (32)4.1.1 PWM调制法基本原理 (32)4.1.2 SPWM调制方法 (33)4.2数字PID控制算法 (34)4.2.1位置式PID控制算法 (35)4.2.2增量式PID控制算法 (36)4.3防脉冲干扰平均值滤波 (38)4.4主程序的设计 (38)4.5 A/D转换及滤波中断子程序的设计 (39)4.6实验结果 (40)4.7小结 (41)5变桨距及偏航控制系统的软硬件设计 (42)5.1风速和转速的测量 (42)5.1.1频率量的测量 (42)5.1.2风速的检测 (43)5.1.3风速仪信号的模拟 (45)5.1.4转速的测量 (45)5.2逻辑量的检测 (46)5.2.1充电电流的检测电路的设计 (47)5.2.2蓄电池的电压检测 (49)5.2.3桨距角及偏航极限位置的检测设计 (50)5.3控制系统的输出控制设计 (50)5.4显示电路的设计 (51)5.5主程序的设计 (52)5.6控制系统的抗干扰措施 (54)5.6.1硬件抗干扰措施 (54)5.6.2软件抗干扰措施 (56)5.7本章小结 (56)6结论 (57)参考文献 (58)在学研究成果 (62)致谢 (63)1绪论1.1课题背景现代社会的存在和发展离不开能源,而人类的发展对环境的破坏情况又非常严峻,所以能源和环境是当今人类生存和发展所要解决的紧迫问题。