列车横向半主动悬挂控制策略
- 格式:doc
- 大小:54.50 KB
- 文档页数:11
高速列车主动悬架系统横向振动控制研究摘要:高速列车主动悬架系统是提高高速列车运行稳定性和乘坐舒适性的重要装备。
其中,横向振动控制是主动悬架系统中的重要研究方向。
本文主要介绍了高速列车主动悬架系统横向振动控制的研究现状与方法,并提出了未来的研究方向。
1.研究背景和意义高速列车的运行速度日益提高,但由于轨道不平顺度和列车自身振动等因素的影响,横向振动问题成为限制高速列车运行速度和乘坐舒适性的重要因素。
通过引入主动悬架系统,能够对列车进行主动振动控制,提高列车的横向稳定性和乘坐舒适性。
因此,高速列车主动悬架系统横向振动控制的研究具有重要的工程应用价值。
2.研究现状目前,高速列车主动悬架系统横向振动控制的研究较为广泛。
其中,横向振动控制方法主要分为传统控制方法和现代控制方法两种。
2.1传统控制方法传统控制方法包括PID控制、模糊控制和滑模控制等。
这些方法简单易行,能够有效抑制高速列车横向振动,但存在控制精度低、鲁棒性差的问题。
2.2现代控制方法现代控制方法主要包括自适应控制和模型预测控制等。
自适应控制能够实时调整控制参数以适应不同工况,提高控制精度和鲁棒性;模型预测控制能够通过预测模型对未来状态进行预测,从而进行优化控制。
这些方法在高速列车主动悬架系统的横向振动控制中取得了较好的效果。
3.研究方法3.1仿真建模通过建立高速列车主动悬架系统的仿真模型,可以对系统的横向振动特性进行分析和评估。
在建立模型时需要考虑列车动力学特性、悬架系统特性和轨道条件等因素,并采用相应的仿真软件进行模拟分析。
3.2试验验证通过在实际高速列车上进行试验验证,能够验证仿真模型的准确性和控制方法的有效性。
试验中需要采集列车振动数据,并结合控制算法进行实时控制。
通过比较试验结果与仿真结果,可以进行系统参数调整和算法优化。
3.3优化设计采用优化方法对高速列车主动悬架系统进行设计和调整,以得到最佳的振动控制效果。
优化方法包括参数优化、结构优化和参数组合优化等。
![基于H控制的高速列车横向半主动悬挂控制系统及控制方法[发明专利]](https://uimg.taocdn.com/0b23d4f6cc7931b764ce1544.webp)
专利名称:基于H控制的高速列车横向半主动悬挂控制系统及控制方法
专利类型:发明专利
发明人:祝乔,胡广地
申请号:CN201710609924.5
申请日:20170725
公开号:CN107544243A
公开日:
20180105
专利内容由知识产权出版社提供
摘要:本发明公开了基于H控制的高速列车横向半主动悬挂控制系统及控制方法,包括分别设置在列车前后的两套结构相同系统构成,每套系统包括用于采集车身垂向振动加速度的加速度传感器、基于H的悬挂控制器、电流控制器和磁流变阻尼器;基于H的悬挂控制器连接加速度传感器和电流控制器;电流控制器连接磁流变阻尼器,磁流变阻尼器连接转向架;本发明可根据路面状况,计算出所需要的主动控制力,通过磁流变阻尼器输出适当的阻尼来改善列车的舒适度和行驶品质。
申请人:西南交通大学
地址:610031 四川省成都市二环路北一段111号西南交通大学科技处
国籍:CN
代理机构:成都信博专利代理有限责任公司
代理人:王沙沙
更多信息请下载全文后查看。
基于GPC-PID的铁路列车横向半主动悬挂控制系统设计金光大;黄晗;李明
【期刊名称】《云南民族大学学报(自然科学版)》
【年(卷),期】2013(022)004
【摘要】为了实时地在线优化PID控制器参数,使其能够应用于复杂的列车悬挂控制系统中,将PID控制器与GPC(广义预测控制)算法结合,利用广义预测算法局部优化策略优化KP、KI、KD参数,设计了GPC-PID控制器,对实际列车建立了17自由度仿真模型、在线辨识CARIMA(受控自回归积分滑动平均)模型,最后给出基于GPC-PID的高速列车半主动悬挂控制系统的设计方案,利用Matlab中Simulink 搭建仿真平台,仿真结果表明方案有效,提高了列车的平稳性.
【总页数】4页(P288-291)
【作者】金光大;黄晗;李明
【作者单位】西南交通大学电气工程学院,四川成都610031;西南交通大学电气工程学院,四川成都610031;西南交通大学电气工程学院,四川成都610031
【正文语种】中文
【中图分类】TP29
【相关文献】
1.基于极点配置算法的列车横向半主动悬挂自适应PID控制系统设计 [J], 金光大;金炜东;李明
2.基于GPC-PID算法的汽车电子节气门控制系统设计 [J], 沈刘晶;仇成群
3.具有模糊约束的广义预测控制在高速列车横向半主动悬挂控制系统中的应用 [J], 李明;金光大;翟冰
4.基于最小方差控制的列车横向半主动悬挂控制系统设计 [J], 李明;金炜东;金光大
5.基于模糊控制的高速车辆横向半主动悬挂仿真 [J], 杨建伟;黄强
因版权原因,仅展示原文概要,查看原文内容请购买。
基于最小方差控制的列车横向半主动悬挂控制系统设计
基于最小方差控制的列车横向半主动悬挂控制系统设计
李明,金炜东,金光大
【摘要】为了改善列车在高速运行状态下的平稳性以及提高乘坐舒适度,采用最小方差控制算法对半主动悬挂控制系统进行仿真分析,并给出基于最小方差控制的高速列车半主动悬挂控制系统的设计方案,利用Matlab-Simulink搭建仿真平台。
仿真结果表明:该算法与传统被动悬挂方式相比,横向减振效果得到明显改善。
【期刊名称】河北科技大学学报
【年(卷),期】2014(035)005
【总页数】5
【关键词】最小方差控制;悬挂系统;半主动
铁路是人类发明的首项公共交通工具,在19世纪初期便在英国出现,直至20世纪初发明汽车,铁路一向是陆上运输的主力。
当前中国的高铁位于世界的最前沿,成为世界上高速铁路系统技术最全、集成能力最强、运营里程最长、运行速度最高、在建规模最大的国家。
然而伴随着运行时速的不断提高,一些技术上的难题也逐渐显露出来。
高速列车在行使过程中受轨道不平顺,天气等因素影响会产生多自由度的随机振动,当振动的增大超过正常范围时,不仅严重影响到了旅客乘车的舒适度,甚至还会给列车运行带来严重的安全隐患[1-2]。
1 列车悬挂控制系统
列车悬挂系统的功能是支持车身,改善乘坐的舒适度,外表看似简单的悬挂系统综合多种作用力,决定着列车的稳定性、舒适性和安全性,是列车十分关键的部件之一。
车辆悬挂系统是构架与轮对、车体与构架之间传递力装置的总称,。
机车车辆半主动悬挂控制策略的研究的开题报告
一、选题的背景和意义
随着高速铁路的发展,列车的速度越来越快,列车的悬挂系统对列车的稳定性和舒适度起着至关重要的作用。
而随着时代的发展和社会的需求,对列车的稳定性和舒
适性的要求越来越高。
因此,对列车的悬挂控制策略的研究显得尤为重要。
机车车辆
的悬挂系统既要保证车辆的稳定性,也要保证乘客的舒适性,并且还要考虑能耗和经
济性等因素,因此,机车车辆半主动悬挂控制策略的研究具有重要的理论和应用价值。
二、研究的内容和方法
1. 研究悬挂控制策略的基本原理和技术;
2. 建立机车车辆半主动悬挂控制系统的数学模型,并研究其控制算法;
3. 在Simulink平台上进行仿真实验,验证控制策略的有效性;
4. 对比不同的悬挂控制策略,评估其在车辆稳定性、乘客舒适性和能耗等方面的优劣。
三、预期的结果和意义
通过对机车车辆半主动悬挂控制策略的研究,可以有效的提高车辆的稳定性和乘客的乘坐舒适性,同时还可以降低车辆的能耗,减小对环境的污染,具有积极的社会
意义。
该研究所获的经验和成果可以为未来的高速列车的设计和制造提供科学依据和
技术支持,具有重要的理论和应用价值。
列车悬挂系统半主动及主动控制的现状摘要:铁道车辆的高速运行增加了列车振动幅度,这不仅会损伤车辆结构,而且振动所引发的车轮动载荷变化和加速度效应,弱化了列车运行的安全性和舒适度,同时这种状态随着行车速度的提高而显著增大。
因此,控制车辆振动是提高列车运行平稳性的核心技术。
为了确保行车安全性和提高乘坐舒适度,一方面可以通过提高线路的质量状况;另一方面则可以通过改善车辆悬挂系统的性能。
为此,设计合适的悬挂系统改善车辆的性能,对机车车辆研究具有重要意义。
结合我国铁路现状,采用半主动悬挂控制系统是我国目前高速列车悬挂系统的最佳方法。
而全主动悬挂系统用于控制算法研究,为半主动控制算法积累经验。
本文针对半主动及主动悬挂系统作详细介绍。
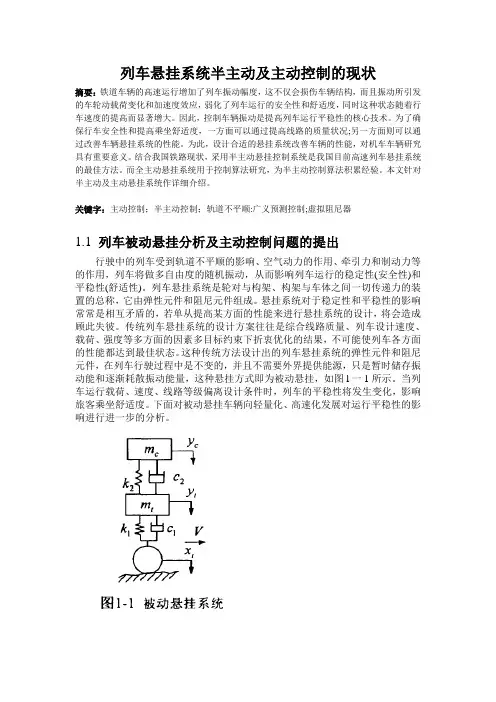
关键字:主动控制;半主动控制;轨道不平顺:广义预测控制;虚拟阻尼器1.1 列车被动悬挂分析及主动控制问题的提出行驶中的列车受到轨道不平顺的影响、空气动力的作用、牵引力和制动力等的作用,列车将做多自由度的随机振动,从而影响列车运行的稳定性(安全性)和平稳性(舒适性)。
列车悬挂系统是轮对与构架、构架与车体之间一切传递力的装置的总称,它由弹性元件和阻尼元件组成。
悬挂系统对于稳定性和平稳性的影响常常是相互矛盾的,若单从提高某方面的性能来进行悬挂系统的设计,将会造成顾此失彼。
传统列车悬挂系统的设计方案往往是综合线路质量、列车设计速度、载荷、强度等多方面的因素多目标约束下折衷优化的结果,不可能使列车各方面的性能都达到最佳状态。
这种传统方法设计出的列车悬挂系统的弹性元件和阻尼元件,在列车行驶过程中是不变的,并且不需要外界提供能源,只是暂时储存振动能和逐渐耗散振动能量,这种悬挂方式即为被动悬挂,如图l一1所示。
当列车运行载荷、速度、线路等级偏离设计条件时,列车的平稳性将发生变化,影响旅客乘坐舒适度。
下面对被动悬挂车辆向轻量化、高速化发展对运行平稳性的影响进行进一步的分析。
1.1.1列车载荷变化或轻量化对平稳性影响设列车受轨道不平顺位移信号xi(t)的激励,构架与车体将分别产生振动位移为y1(t)与yc(t),如图l一2为图1一1所示的被动悬挂系统方框图。
基于天棚和地棚混合阻尼的高速车辆横向减振器半主动控制郭孔辉;隋记魁;郭耀华【摘要】In studying the attenuation of high-speed railway vehicle lateral vibration, traditionnl skyhook damping control methods were designed to reduce the body vibration. Although the vehicle lateral vibration was reduced, the bogie and wheelset lateral vibrations increased, they might lead to a vehicle derailment when the vehicle running at a high speed, the operation safety was also reduced. In order to solve the problems above, a single trailer vehicle model was established in Adams/Rial. Combining skyhook damping control with groundhook damping control, the mixed damping control was applied to reduce vehicle body lateral vibration. The results showed that both the high-speed railway vehicle comfort and safety are considered with the proposed mixed damping control method, it makes a high-speed railway rehicle have better comprehensive performance.%在研究抑制高速轨道车辆横向振动时,传统天棚阻尼控制方法使车体的横向振动降低的同时,却增加了转向架和轮对的横向振动,导致机车高速运行时脱轨的可能性变大,运行安全性降低.针对上述问题,在Adams/Rial中建立了轨道车辆单节拖车的整车模型,利用Matlab/Simulink工具,结合天棚阻尼控制和地棚阻尼控制特点,研究了混合阻尼控制对高速列车横向振动的抑制作用.结果表明,混合天棚阻尼控制综合考虑了高速车辆运行时的舒适性和安全性,使高速车辆具有更好的综合性能.【期刊名称】《振动与冲击》【年(卷),期】2013(032)002【总页数】6页(P18-23)【关键词】高速车辆;半主动控制;天棚;地棚;混合阻尼控制【作者】郭孔辉;隋记魁;郭耀华【作者单位】吉林大学汽车动态模拟国家重点实验室,长春130022【正文语种】中文【中图分类】U260.11列车的高速运行给人们出行带来方便的同时,也增加了车辆的振动[1],对乘客乘坐的舒适性和列车安全性都提出了更高的要求,即高速列车本身应具有较高的抑制振动的功能。
汽车半主动悬架控制策略研究引言随着车辆性能和安全要求的不断提高,汽车悬架系统的控制策略成为了研究的焦点之一、半主动悬架系统是一种利用电控阻尼机构来调整悬架刚度和阻尼的悬架系统,在提高车辆操控性能的同时也能提高乘坐舒适度。
本文将对半主动悬架系统的控制策略进行详细阐述和研究。
一、半主动悬架系统概述半主动悬架系统是一种通过调整悬架系统的刚度和阻尼来适应不同驾驶条件的悬架系统。
相比于传统的被动悬架系统,半主动悬架系统具有更高的悬架效率和更好的车辆操控性能。
半主动悬架系统通常由电液或电磁调节阻尼器、传感器和控制器组成。
二、半主动悬架系统的控制策略半主动悬架系统的控制策略主要包括基于前馈控制和反馈控制的方法。
1.前馈控制前馈控制是通过预先规划的动作来控制悬架系统的刚度和阻尼。
前馈控制可以根据车辆的加速度、刹车、转向等信号提前调整悬架系统的刚度和阻尼,以提高车辆的操控性能和乘坐舒适度。
例如,在车辆急刹车时,可以通过增加悬架系统的刚度和阻尼来提高制动效果和稳定性。
2.反馈控制反馈控制是根据实时的车辆状态和环境信息来调整悬架系统的刚度和阻尼。
反馈控制通常采用模糊控制、PID控制或基于模型的控制方法。
这些方法可以通过将车辆的状态与期望的状态进行比较来实现悬架系统的调整。
例如,在车辆通过不平路面时,反馈控制可以根据车辆的垂直加速度和悬架行程来调整悬架的刚度和阻尼,以提高乘坐舒适度。
三、半主动悬架系统的优势与应用半主动悬架系统相比于传统的被动悬架系统具有以下优势:1.提高悬架效率:半主动悬架系统可以根据实时的驾驶条件和车辆状态来调整悬架的刚度和阻尼,以提供最佳的悬架效果。
2.改善车辆操控性能:半主动悬架系统可以根据不同驾驶需求提供不同的悬架刚度和阻尼,以提高车辆的操控性能和稳定性。
3.提高乘坐舒适度:半主动悬架系统可以根据路面状况和车辆状态调整悬架的刚度和阻尼,以提供更好的乘坐舒适度。
半主动悬架系统广泛应用于高档轿车、SUV和跑车等车型。
列车横向半主动悬挂模糊控制策略研究李广军;金炜东;赵景波【摘要】To 17-DOF vehicle’s lateral semi-active suspension model, it is proposed that maximum and root mean square value of lateral acceleration are used to analyze lateral semi-active suspension fuzzy control strategy. To reduce lateral vibration and improve lateral stability, fuzzy control is used to adjust damping values in train’s semi-active suspension. So train’s lateral sus-pension is modeled by simulink. Direct and indirect method of fuzzy control strategy are designed. Simulation is also carried on. Simulation results show that lateral and synthetic acceleration of the front bogie is bigger than the back bogie through interaction between lateral and shaking acceleration;direct method is better than indirect method and passive suspension by analyzing power spectral density of acceleration at the same time.%针对17自由度列车横向半主动悬挂,提出以横向振动加速度最大值和均方根值作为评价指标,分析了列车横向悬挂模糊控制策略。
列车横向半主动悬挂控制策略及其油压减振器控制机理研究李贵平, 王广丰, 刘宏友, 徐伟ResearchontheControlStrate gyoftheLateralSemi 2activeSus pensionoftheTrainandtheWorkTheor yofDam perLIGui 2ping,WANGGuan g2feng,LIUHon g2you,XUWei(青岛理工大学机械工程学院,266033 )摘要:介绍了列车横向半主动悬挂的基本控制策略及其改进,分析了一种半主动减振器的基本原理及对控制阀的设计要求,对半主动减振器的研究应用具有一定的指导意义。
关键词:天棚阻尼原理; 横向半主动悬挂; 减振器; 电液比例溢流阀中图分类号:TH137 文献标识码:B 文章编号:100024858 (2008) 04200072031 前言铁路车辆的横向振动对乘坐舒适度的影响很大,依靠提高线路等级的办法又需要投入巨额费用,而采用全主动悬挂和半主动悬挂却能有效地抑制机车车辆的横向振动,提高乘坐舒适度。
与全主动悬挂相比较,半主动悬挂采用无源但可控的阻尼器,能够根据预定的阻尼控制规律及时调节阻尼力大小,除控制器件的驱动外,不需输入外来能源(如气缸、液压泵) ,其结构相对简单, 成本低,而且能够达到期望的控制效果。
更为方便的是,这种减振器可以和被动减振器相互换,而不需要改造原来的悬挂系统。
目前对列车横向半主动悬挂系统的研究,国外最为典型的是日本,并且已经在部分高速列车上使用[1 、2、4] 。
国内在这方面也展开了大量的研究,但还没有走向实际应用阶段。
本文对列车半主动悬挂系统的基本控制策略、阻尼器的实现等方面进行研究分析。
2 横向半主动悬挂基本控制策略及其改进天棚阻尼原理是车辆悬挂系统半主动控制最常用的方法,该方法简单有效,易于实施[3] 。
采用天棚阻尼(skyhook ) 原理作二系横向悬挂系统的基本控制原理见图1 。
假设列车沿一道虚拟的刚性墙移动,在虚拟墙与车体之间装设一个虚拟减振器(称作天棚减振器) 来减小车体横向振动。
按天棚阻尼原理,天棚减振器在列车运行中需始终处于工作状态以提供阻尼力。
但天棚减振器是虚拟的,在实际应用中由安装于车体F s —天棚减振器阻尼力C s —天棚减振器阻尼系数F —实际减振器阻尼力 C —实际减振器阻尼系数v 1 —车体横向速度v 2 —转向架横向速度图1 横向天棚阻尼原理图与转向架间的横向减振器模拟实现。
实际减振器提供的阻尼力与活塞的移动速度(车体和转向架的相对速度) 成比例,当车体运动速度与减振器活塞移动速度相反时,产生的阻尼力会加大车体横向振动。
所以横向半主动控制的天棚控制规则定义如下:收稿日期:2007210208作者简介:李贵平(1975 —) ,男,内蒙古呼和浩特人,硕士研究生,研究方向:机电控制。
F s =- C s v1 , v1 ( v1 - v2) > 00 , v1 ( v1 - v2) ≤0(1)而实际减振器半主动控制时的阻尼力为:F =- C( v1 - v2) , v1 ( v1 - v2) > 00 , v1 ( v1 - v2) ≤0(2)令F = F s ,用阻尼系数表达式(1) 即为:7 2008 年第4 期液压与气动C( t) =C s v1/ ( v1 - v2) , v1 ( v1 - v2) > 00 , v1 ( v1 - v2) ≤0(3)将C 写为时间的函数,是因为在列车运行过程中v1 和v2 是不断变化的, 所以在模拟天棚阻尼力时要求实际阻尼系数C 也要根据v1 和v2 作相应的变化。
理想的天棚阻尼力是决定于车体运动速度的, 不需要考虑转向架的运动状况。
但在实际应用中, 阻尼力是依赖于减振器活塞运动速度的, 与转向架的速度有关。
当相对速度较低,而车体速度较高时, 按式(3) 所要求的实际阻尼系数C 就会很大,这在实际中是难以达到的。
但由于轨道的振动频率要高于车体的振动频率,所以通过减少在车体绝对速度方向上阻尼力的方式来产生一个接近理想减振器的力是可能的[4 ] 。
也就是说相对速度的变化频率比车体速度的变化频率高,从而可以通过控制实际阻尼力的最大值来模拟天棚阻尼力。
在相对速度较低的情况下, 实际减振器产生的阻尼力达不到天棚阻尼力时, 维持一定的阻尼系数不变;在相对速度较高的情况下,实际阻尼力达到天棚阻尼力时,控制阻尼系数C 为C s·v1/ ( v1 - v2) ,使其等于天棚阻尼力。
另外,由于减振器油液回路本身存在液阻和摩擦阻力等作用,实际最小阻尼也不可能做到零。
所以在具体应用中,对横向天棚阻尼规则需要做一些改进。
结合半主动控制中的两个重要环节,即按速度方向切换阻尼和控制阻尼大小,相应的控制方式有两种: 一种是只在方向上做控制;另一种是两者都控制。
下面是天棚阻尼控制规则的两种改进形式:A. C =C s , v1 ( v1 - v2) > 0C0 , v1 ( v1 - v2) ≤0(4)B. C =min C h ,C s v1v1 - v2, v1 ( v1 - v2) > 0C0 , v1 ( v1 - v2) ≤0(5)控制规律A 是设置一固定阻尼,只按速度方向切换阻尼,这种方式被称为“开2关式半主动悬挂系统”。
控制规律B 是既根据速度方向切换阻尼,又控制阻尼幅值,这种方式是连续调节阻尼的。
设置了阻尼的上限C h ,当按天棚阻尼公式计算出的阻尼系数高于C h 时,实际阻尼C 取上限,当低于C h 时按天棚控制规则取值。
其中两式C0 中为设置的阻尼下限值。
文献[5] 采用上述两种控制规律的横向半主动减振器,并考虑了悬挂系统的时滞,在具有23 个自由度的铁道客车系统非线性数学模型中进行了仿真分析。
仿真结果表明,无论采用哪种控制规律,都能大大降低车体的横向振动加速度,改善旅客乘坐舒适度。
两种控制规律相比,控制规律B 的减振效果要明显优于控制规律A。
3 半主动悬挂阻尼器的实现高速列车上使用的半主动悬挂阻尼器最基本的方法有两种:一种是通过改变阻尼孔节流面积的办法来控制阻尼力;另一种是通过设定压力阀的输出压力来调节阻尼力。
本文介绍后一种。
电液比例溢流阀调节阻尼力的横向半主动减振器,其结构原理[6] 见图2 。
该减振器由减振本体、横向加速度传感器、控制器、2 个电磁开关阀和1 个电液比例溢流阀及相应的控制油路组成。
图2 半主动减振器结构原理2 个电磁阀用来切换阻尼力的方向,节流阀与电液比例溢流阀是控制阻尼力幅值的。
控制器一方面用来接收加速度传感器检测到的车体加速度信号,将其转化为车体速度,另一方面通过一定的运算规则给电磁阀和比例溢流阀发出控制信号,使其动作。
3.1 方向控制通过2 个电磁阀开启与关闭的简单组合,可以巧妙地使阻尼力按速度方向切换,即无论是拉伸或压缩过程,都能使横向天棚阻尼控制规则中不需要提供阻尼力时的功能得以实现。
根据速度相位判别,车体速度与减振器活塞速度(相对速度) 共有4 种不同的情况。
当车体速度向左(图2 中方向) 时,活塞速度有可能与其同向,也有可能与其反向。
此时令电磁阀2 通电开启,电磁阀关闭。
若活塞的速度与车体速度相同时,则减振器处于拉伸状态,此时需要提供阻尼力。
由图3a 分析,活塞上的单向阀关闭,被压缩的油液由左腔流出再经节流系统流回油箱。
此时左腔为高压腔,给车体提供向右的阻尼力阻止车体向左运动。
同时,由油箱经阀2 和底部单向阀向右腔补油。
若活塞速度与车体速度反向,则减振器处于压缩状态,按天棚阻尼控制规则是不希望8 液压与气动2008 年第4 期1. 最小控制时2. 非控制时3. 最大控制时a) 半主动减振器1. 车体速度v 12. 活塞速度( v 1 - v 2)3. 天棚阻尼力F s4. 节流阀作用时阻尼力F′5. 实际阻尼力Fb) 半主动悬挂图3 力2速度特性曲线提供阻尼力的。
此时活塞上的单向阀开启,使左右两腔连通,由于阀2 是开启的,所以左右两腔都与油箱相通,同时为低压腔,减振器不提供阻尼力。
当车体速度向右时,阀1 通电开启,阀2 关闭。
同理按活塞运动速度的不同可以做出分析,两者速度同向时提供阻尼力,反向时不提供阻尼力。
通过以上分析可知,只要按车体的速度相位控制两电磁阀的工作状态就可以在提供与不提供阻尼力之间进行切换,而不必考虑活塞(或转向架) 的速度方向。
3.2 幅值控制节流阀与电液比例溢流阀并联部分是用来控制阻尼力幅值的,其工作特性曲线见图3a 。
图3a 中所示的是阻尼力与活塞速度的关系曲线,由于减振器内部压力与阻尼力成比例,而流量与活塞运动速度成比例,所以也可理解为压力与流量的关系。
节流阀的作用是在电液比例溢流阀开启前提供初始节流作用。
根据车体速度确定的天棚阻尼力设定电液比例溢流阀的开启压力值,当减振器内部压力上升达到开启值时,比例溢流阀动作溢流,使压力保持在控制值。
其压力控制范围介于曲线1 与曲线3 之间。
当被控阻尼力在此范围时,电液比例溢流阀的开启压力可以任意调节。
4 半主动悬挂阻尼力与速度的关系通过上述对减振器工作原理的分析可知,其阻尼力是由节流阀初始节流作用和电液比例溢流阀溢流作用产生的。
按车体速度和转向架的速度关系及横向天棚控制规则作出半主动悬挂阻尼力与速度的关系如图3b 所示。
若车体横向速度v1 与活塞移动速度( v1 - v2 ) 同向时,减振器提供阻尼力;反向时,使减振器完全卸载, 不提供阻尼力。
当由节流阀产生的阻尼力F′上升到天棚阻尼力F s 时,比例溢流阀开启,控制阻尼力,使其按天棚阻尼力要求变化。
曲线5 即为半主动控制的实际阻尼力F。
经分析可知,图中所示的控制规律即是公式(5) 的控制规律。
5 电液比例溢流阀的设计要求考虑到列车的安全运行,半主动减振器要具有一定的冗余设计,即当控制系统因故障失效时,半主动减振器能够转为被动减振作用。
如图2 所示,如果采用一般的电液比例溢流阀,故障时减振器高压腔的油液就会直接通过电液比例溢流阀流回油箱,使减振器完全失效,这是减振器在非控制状态所不允许的。
所以有必要设计特殊的电液比例溢流阀,保证其在正常工作状态有良好的性能,非控制状态能够保持在一个特定的开启设定值,在被动减振中作卸荷阀(图3a 中曲线2) 。
同时要求该设定压力值在最小控制和最大控制压力间的某个范围内任意可调,以满足不同车辆和工况的使用要求。
6 结束语本文对列车横向半主动悬挂的基本控制策略、改进型控制规律、电液比例溢流阀调节阻尼力的半主动减振器的工作原理和采用特殊电液比例溢流阀的必要性进行了研究分析,对半主动减振器的研究应用具有一定的指导意义。
参考文献:[1] 佐佐木君章(日) . 改善高速列车的横向乘坐舒适度———半主动悬挂减振装置的应用[J]. 铁道学报,2004,26 (1) :105- 115.[2] 中里雅一,等(日) . 铁道车辆用半有源减振器的开发[J]. 国外铁道车辆,2003,40 (4) :33-38.[3] 熊勇刚,谢勇,丁问司,等. 机车车辆半主动悬挂控制系统的研究[J]. 中南大学学报,2005,36 (4) :678-681.[4] KimiakiSASAKI (日) . 日本摆式列车的横向半主动式悬挂系统[J]. 国外铁道车辆,2001,38 (5) :36-40.[5] 曾京,戴焕云,邬平波. 基于开关阻尼控制的铁道客车系统的动力学性能研究[J]. 中国铁道科学,2004,25(6) :27-31.[6] 丁问司,刘少军,卜继玲. 高速列车横向悬挂控制方式及半主动减振器[J]. 中国机械工程,2003,14 (12) :995-998.9 2008 年第4 期液压与气。