第10讲 4 3 汽车的制动效能及其恒定性 4 4 制动时汽车的方向稳定性
- 格式:pdf
- 大小:158.42 KB
- 文档页数:5
汽车理论Automobile TheoryProf. Dr. Baohua Wang School of Automobile Engineering Hubei University of Automotive TechnologyAdd: 167 Checheng West Road, Shiyan, Hubei 442002, China Email: w724681466@汽车理论Vehicle Theory第四章 汽车的制动性第4章 汽车制动性制动性:汽车行驶时能在短距离内停车且维持方向 稳定性和下长坡时能维持一定车速的能力。
4.1 4.2 4.3 4.4 4.5 4.6 4.7Prof. Dr. Baohua Wang制动性的评价指标 制动时车轮的受力 汽车的制动效能及其恒定性 制动时汽车的方向稳定性 前后制动器制动力的比例关系 驻车制动性 汽车制动性的影响因素School of Automobile Engineering Hubei University of Automotive Technology2 2013-5-13Page汽车理论Vehicle Theory4-3 制动效能及其恒定性第4章 汽车制动性制动效能: 汽车迅速降低车速直至停车的能力。
由于汽车的动力性(最高车速)不同,对制动 效能也提出了不同要求:一般轿车、轻型货车 行驶车速高,要求制动效能也高;重型货车行 驶车速低,要求制动效能就稍低一点。
Prof. Dr. Baohua WangSchool of Automobile Engineering Hubei University of Automotive Technology3 2013-5-13Page汽车理论Vehicle Theory1.制动效能的评价指标1.制动距离第4章 汽车制动性汽车在附着性能良好的水平路面上以车速u0滑 行时,从驾驶员踩着制动踏板开始到停车为止汽车 驶过的距离。
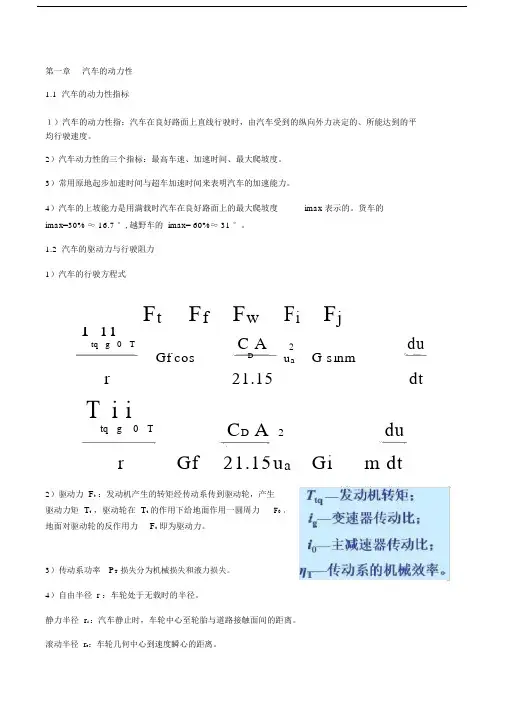
第一章 汽车的动力性 1.1 汽车的动力性指标1)汽车的动力性指:汽车在良好路面上直线行驶时,由汽车受到的纵向外力决定的、所能达到的平均行驶速度。
2)汽车动力性的三个指标:最高车速、加速时间、最大爬坡度。
3)常用原地起步加速时间与超车加速时间来表明汽车的加速能力。
4)汽车的上坡能力是用满载时汽车在良好路面上的最大爬坡度 imax 表示的。
货车的imax=30% ≈ 16.7 °,越野车的 imax= 60%≈ 31 °。
1.2 汽车的驱动力与行驶阻力 1)汽车的行驶方程式F tF fF wF iF jT tq i g i0 TC A2duGf cosDu aG sinmr21.15dtT tq i g i0 TC D A 2durGf21.15u aGimdt2)驱动力 F t :发动机产生的转矩经传动系传到驱动轮,产生 驱动力矩 T t ,驱动轮在 T t 的作用下给地面作用一圆周力 F 0 ,地面对驱动轮的反作用力F t 即为驱动力。
3)传动系功率 P T 损失分为机械损失和液力损失。
4)自由半径 r :车轮处于无载时的半径。
静力半径 r s :汽车静止时,车轮中心至轮胎与道路接触面间的距离。
滚动半径 r r :车轮几何中心到速度瞬心的距离。
5)汽车行驶阻力 : F F f F w F i F j6)滚动阻力 Ff:在硬路面上,由轮胎变形产生;在软路面上,由轮胎变形和路面变形产生。
7)轮胎的迟滞损失指:轮胎在加载变形时所消耗的能量在卸载恢复时不能完全收回,一部分能量消耗在轮胎内部摩擦损失上,产生热量,这种损失称为轮胎的迟滞损失。
8)滚动阻力系数 f 指:车轮在一定条件下滚动时所需的推力与车轮负荷之比。
故Ff=W*f 。
9)驻波现象:在高速行驶时,轮胎离开地面后因变形所产生的扭曲并不立即恢复,其残余变形形成了一种波,这就是驻波。
此时轮胎周缘不再是圆形,而呈明显的波浪形。
第10讲4-3汽车的制动效能及其恒定性4-4制动时汽车的方向稳定性第10讲 2学时教学目的及要求:通过本次课的学习,使学生掌握制动距离的计算,理解制动力矩恒定性的概念及其影响因素,制动跑偏和侧滑的概念,能够分析汽车制动跑偏和侧滑机理。
主要内容:§4-3 汽车的制动效能及其恒定性§4-4 制动时汽车的方向稳定性教学重难点:1.制动距离的计算,影响制动效能恒定性的因素2.侧滑与跑偏概念的理解,前后轮抱死对制动时方向稳定性的影响,悬架和转向系统干涉教学过程:§4—3 汽车的制动效能及其恒定性——汽车迅速降低行驶速度直至停车的能力。
其评价指标:制动距离,s(m);制动减速度,j(m/s2)。
一、制动时整车的受力分析:沿行驶方向:F j = F Xb + ∑F ≈F Xbi=0(水平路),F f=0(坚硬路),F W=0(制动初速度不高)。
其中F j = mj为减速惯性力二、制动减速度:jj = F Xb / m汽车在不同的路面上能达到的最大制动减速度为:j max= F Xbmax/m = φb G/m =φb g允许前后轮都抱死:j max = φs g装有ABS的汽车:j max = φp g三、制动距离:s指汽车车速为u a0 (空档)时,从驾驶员踩着制动踏板开始到汽车停住为止,所驶过的距离。
1、制动过程:驾驶员的反应时间:τ1=τ1’ +τ1”(驾驶员精神反应+生理反应)制动器的作用时间:τ2=τ2’ +τ2”(制动器滞后时间+制动力增长时间)持续时间:τ3 (j 基本不变)消除制动时间:τ4(τ4过长,影响随后起步或加速行驶)2、制动距离的大小估算:制动距离应是τ2’ 、τ2”和τ3期间驶过的距离。
1)τ2’ 期间驶过的距离:S 2'= u 0τ2' ,m2)τ2" 期间驶过的距离:S 2"∵制动减速度线性增长,即:dud τ = k τ其中 k = - j maxτ2"∴ ∫du = ∫k τ d τ又∵τ=0 时 u = u 0故u = u 0 + 12 k τ2则τ=τ2"时u e = u 0 + 12 k τ2"2 (求S 3用)S 2" = ∫u d τ = 0τ2"(u 0 + 12 k τ2 ) d τ= u 0τ2" - 16 j max τ2"2∴ S 2 = S 2' + S 2"3)τ3 期间驶过的距离:S 3∵作匀减速运动,且知初速为u e ,末速为0,则:S 3 = u e 22j max = u 022j max - 12 u 0τ2" + 18 j max τ2"2总制动距离:S = S2 + S3= u0(τ2'+ τ2"2) +u022j max-124j maxτ2"2≈u0(τ2'+ τ2"2) +u022j maxS =13.6(τ2’+τ2"2)u a0 +u a02254φb,m3、影响制动距离的因素:⑴附着系数:φ↗→S↘⑵起始车速:u a0↗→S↗↗⑶制动器作用时间:τ2——主要原因(与τ3比)四、制动效能的恒定性:取决于摩擦副的材料、制动器的结构。

汽车理论第四版(余志生著)课后答案下载汽车理论第四版(余志生著)课后答案下载本书为全国高等学校机电类专业教学指导委员会汽车与拖拉机专业小组制订的规划教材,并于“九五”期间被教育部立项为“普通高等教育九五部级重点教材”和“面向21世纪课程教材”,于“十五”期间被教育部立项为“普通高等教育十五国家级规划教材”。
本书根据作用于汽车上的外力特性,分析了与汽车动力学有关的汽车各主要使用性能:动力性、燃油经济性、制动性、操纵稳定性、行驶平顺性及通过性。
各章分别介绍了各使用性能的评价指标与评价方法,建立了有关的动力学方程,分析了汽车及其部件的结构形式与结构参数对各使用性能的影响,阐述了进行性能预测的基本计算方法。
各章还对性能试验方法作了简要介绍。
另外,还介绍了近年来高效节能汽车技术方面的新发展。
本书为学生提供了进行汽车设计、试验及使用所必需的专业基础知识。
汽车理论第四版(余志生著):推荐理由点击此处下载汽车理论第四版(余志生著)课后答案汽车理论第四版(余志生著):书籍目录第4版前言第3版前言第2版前言第1版前言常用符号表第一章汽车的动力性第一节汽车的动力性指标。
第二节汽车的驱动力与行驶阻力一、汽车的驱动力二、汽车的行驶阻力三、汽车行驶方程式第三节汽车的驱动力,行驶阻力平衡图与动力特性图一、驱动力一行驶阻力平衡图二、动力特性图第四节汽车行驶的附着条件与汽车的附着率一、汽车行驶的附着条件二、汽车的附着力与地面法向反作用力三、作用在驱动轮上的地面切向反作用力四、附着率第五节汽车的功率平衡第六节装有液力变矩器汽车的动力性参考文献第二章汽车的燃油经济性第一节汽车燃油经济性的评价指标第二节汽车燃油经济性的计算第三节影响汽车燃油经济性的因素一、使用方面二、汽车结构方面第四节装有液力变矩器汽车的燃油经济性计算第五节电动汽车的研究一、混合动力电动汽车的特点二、混合动力电动汽车的结构三、混合动力电动汽车的节油原理四、能量管理策略五、实例分析一一丰田混合动力电动汽车Prius六、电动汽车的动力性计算第六节汽车动力性、燃油经济性试验一、路上试验二、室内试验参考文献第三章汽车动力装置参数的选定第一节发动机功率的选择第二节最小传动比的选择第三节最大传动比的选择第四节传动系挡数与各挡传动比的选择第五节利用燃油经济性-加速时间曲线确定动力装置参数一、主减速器传动比的确定二、变速器与主减速器传动比的确定三、发动机、变速器与主减速器传动比的确定参考文献第四章汽车的制动性第一节制动性的评价指标第二节制动时车轮的受力一、地面制动力二、制动器制动力三、地面制动力、制动器制动力与附着力之间的关系四、硬路面上的附着系数第三节汽车的制动效能及其恒定性一、制动距离与制动减速度二、制动距离的分析三、制动效能的恒定性第四节制动时汽车的方向稳定性一、汽车的制动跑偏二、制动时后轴侧滑与前轴转向能力的丧失第五节前、后制动器制动力的比例关系一、地面对前、后车轮的法向反作用力二、理想的前、后制动器制动力分配曲线三、具有固定比值的前、后制动器制动力与同步附着系数四、前、后制动器制动力具有固定比值的汽车在各种路面上制动过程的分析五、利用附着系数与制动效率六、对前、后制动器制动力分配的要求七、辅助制动器和发动机制动对制动力分配和制动效能的影响八、制动防抱装置第六节汽车制动性的试验参考文献第五章汽车的操纵稳定性第一节概述一、汽车操纵稳定性包含的内容二、车辆坐标系与转向盘角阶跃输入下的时域响应三、人一汽车闭路系统四、汽车试验的两种评价方法第二节轮胎的侧偏特性一、轮胎的坐标系二、轮胎的侧偏现象和侧偏力-侧偏角曲线三、轮胎的结构、工作条件对侧偏特性的影响四、回正力矩一一绕OZ轴的力矩五、有外倾角肘轮胎的滚动第三节线性二自由度汽车模型对前轮角输入的响应一、线性二自由度汽车模型的运动微分方程二、前轮角阶跃输入下进入的汽车稳态响应一一等速圆周行驶三、前轮角阶跃输入下的瞬态响应四、横摆角速度频率响应特性第四节汽车操纵稳定性与悬架的关系一、汽车的侧倾二、侧倾时垂直载荷在左、右侧车轮上的'重新分配及其对稳态响应的影响三、侧倾外倾一一侧倾时车轮外倾角的变化四、侧倾转向五、变形转向一一悬架导向装置变形引起的车轮转向角六、变形外倾一一悬架导向装置变形引起的外倾角的变化第五节汽车操纵稳定性与转向系的关系一、转向系的功能与转向盘力特性二、不同工况下对操纵稳定性的要求三、评价高速公路行驶操纵稳定性的试验一一转向盘中间位置操纵稳定性试验四、转向系与汽车横摆角速度稳态响应的关系第六节汽车操纵稳定性与传动系的关系一、地面切向反作用力与“不足-过多转向特性”的关系二、地面切向反作用力控制转向特性的基本概念简介第七节提高操纵稳定性的电子控制系统一、极限工况下前轴侧滑与后轴侧滑的特点二、横摆力偶矩及制动力的控制效果三、各个车轮制动力控制的效果四、四个车轮主动制动的控制效果五、VSC系统的构成六、装有VSC系统汽车的试验结果第八节汽车的侧翻一、刚性汽车的准静态侧翻二、带悬架汽车的准静态侧翻三、汽车的瞬态侧翻第九节汽车操纵稳定性的路上试验一、低速行驶转向轻便性试验二、稳态转向特性试验三、瞬态横摆响应试验四、汽车回正能力试验五、转向盘角脉冲试验六、转向盘中间位置操纵稳定性试验参考文献第六章汽车的平顺性第一节人体对振动的反应和平顺性的评价一、人体对振动的反应二、平顺性的评价方法第二节路面不平度的统计特性一、路面不平度的功率谱密度二、空间频率功率谱密度C。
制动时汽车的方向稳定性在对汽车实施制动过程中,有时会出现制动跑偏、后轴侧滑或前轮失去转向能力等现象,从而造成汽车失去控制而离开原来的行驶方向,甚至发生撞入对方车辆行驶轨道、下沟、滑下山坡的危险情况。
一般称汽车在制动过程中维持直线行驶或按预定弯道行驶的能力为制动时汽车的方向稳定性。
制动跑偏是指制动时汽车自动向左或向右偏驶的现象。
制动侧滑是指制动时汽车的某一轴或两轴发生横向移动的现象。
最危险的情况是在高速制动时发生后轴侧滑,此时汽车常发生不规则的急剧回转运动而失去控制。
跑偏与侧滑是有联系的,严重的跑偏有时会引起后轴侧滑,易于发生侧滑的汽车也有时加剧跑偏的趋势。
图[1]画出了单纯制动跑偏和由跑偏引起后轴侧滑时轮胎留在地面上的印迹的示意图。
前轮失去转向能力,是指弯道制动时汽车不再按原来的弯道行驶而沿弯道切线方向驶出;直线行驶制动时,虽然转向盘但汽车仍按直线方向行驶的现象。
失去转向能力和后轴侧滑也是有联系的,一般如果汽车后轴不会侧滑,前轮就可能失去转向能力;后轴侧滑,前轮常仍有转向能力(后面将做具体分析)。
一、汽车的制动跑偏制动时汽车跑偏的原因有两个:1) 汽车左、右轮,特别是前轴左、右车轮(转向轮)制动器的制动力不相等。
2) 制动时悬架导向杆系与转向杆系拉杆在运动学上的不协调(相互干涉)。
其中,第一原因是制造、调整误差造成的,汽车究竟向左或向右跑偏,要根据具体情况而定;而第二个原因是设计造成的,制动时汽车总是向左(或向右)一方跑偏。
图[2]给出了由于转向轴左、右车轮制动力不相等而引起跑偏的受力分析。
为了简化,假定车速较低,跑偏不严重,且跑偏过程中转向盘是不动的,在制动过程中也没有发生侧滑,并忽略汽车做圆周运动产生的离心力及车身绕质心的惯性力偶矩。
设前左轮的制动器制动力大于右轮,故地面制动力F X1l >F X1r 时,前、后轴分别受到的地面侧向反作用力为F Y1和F Y2。
显然,F X1l 绕主销的力矩大于F X1l 绕主销的力矩。
第10讲2学时
教学目的及要求:
通过本次课的学习,使学生掌握制动距离的计算,理解制动力矩恒定性的概念及其影响因素,制动跑偏和侧滑的概念,能够分析汽车制动跑偏和侧滑机理。
主要内容:
§4-3汽车的制动效能及其恒定性
§4-4制动时汽车的方向稳定性
教学重难点:
1.制动距离的计算,影响制动效能恒定性的因素
2.侧滑与跑偏概念的理解,前后轮抱死对制动时方向稳定性的影响,悬架和转向系统干涉
教学过程:
§4—3汽车的制动效能及其恒定性
——汽车迅速降低行驶速度直至停车的能力。
其评价指标:制动距离,s(m);
制动减速度,j(m/s2)。
一、制动时整车的受力分析:
沿行驶方向:F j=F Xb+∑F≈F Xb
i=0(水平路),F f=0(坚硬路),F W=0(制动初速度不高)。
其中F j=mj为减速惯性力
二、制动减速度:j
j=F Xb/m
汽车在不同的路面上能达到的最大制动减速度为:
j max=F Xbmax/m=φb G/m=φb g
允许前后轮都抱死:j max=φs g
装有ABS的汽车:j max=φp g
三、制动距离:s
指汽车车速为u a0(空档)时,从驾驶员踩着制动踏板开始到汽车停住为止,所驶过的距离。
1、制动过程:
驾驶员的反应时间:τ1=τ1’+τ1”
(驾驶员精神反应+生理反应)
制动器的作用时间:τ2=τ2’+τ2”
(制动器滞后时间+制动力增长时间)持续时间:τ3(j基本不变)
消除制动时间:τ4
(τ4过长,影响随后起步或加速行驶)2、制动距离的大小估算:
制动距离应是τ2’、τ2”和τ3期间驶过的距离。
1)τ2’期间驶过的距离:S2'=u0τ2',m
2)τ2"期间驶过的距离:S2"
∵制动减速度线性增长,即:du
dτ
=kτ
其中k=-j max τ2"
∴∫du=∫kτdτ又∵τ=0时u=u0
故u=u0+1
2
kτ2
则τ=τ2"时u e=u0+1
2
kτ2"2(求S3用)
S2"=∫u dτ=错误!
=u0τ2"-1
6
j maxτ2"2
∴S2=S2'+S2"
3)τ3期间驶过的距离:S3
∵作匀减速运动,且知初速为u e,末速为0,则:
S3=u e2
2j max =u02
2j max
-1
2
u0τ2"+1
8
j maxτ2"2
总制动距离:
S =S 2+S 3
=u 0(τ2'+τ2"2
)+u 022j max -124j max τ2"2≈u 0(τ2'+τ2"2
)+u 022j max S =13.6(τ2’+τ2"2)u a0+u a02254φb
,m
3、影响制动距离的因素:
⑴附着系数:φ↗→S ↘
⑵起始车速:u a0↗→S ↗↗
⑶制动器作用时间:τ2——主要原因(与τ3比)
四、制动效能的恒定性:
取决于摩擦副的材料、制动器的结构。
1、抗热衰退性:
2、抗水衰退性:
§4—4制动时汽车的方向稳定性
——汽车在制动过程中,维持直线行驶或按预定弯道行驶的能力能力。
跑偏——制动时,汽车自动向左或向右偏驶。
侧滑——制动时,汽车的某一轴或两轴车轮横向滑移。
前轮失去转向能力——指弯道制动时,汽车不再按原来弯道行驶而沿弯道切线方向驶出或直线制动时转动方向盘汽车仍按直线方向行驶的现象。
一、汽车的制动跑偏:
1、汽车的左右车轮特别是转向轮左右车轮制动器制动力F μ不相等;
——由制造、调整的误差造成的,有向左或向右。
2、制动时悬架导向杆系与转向杆系在运动学上的不协调。
——由设计原因造成的,总向左(或向右)跑偏。
例:一试制中的货车,制动总向右跑偏,分析原因:转向节上节臂处球头销离前轴中心线太高,且悬架钢板弹簧刚度太小(软)。
二、制动时后轴的侧滑:
试验分析:
1、前轮无制动力、后轮有足够的制动力:
——会侧滑;
2、后轮无制动力、前轮有足够的制动力:
——不会侧滑,但前轮失去转向能力;
3、前、后轮都有足够的制动力,但它们抱死拖滑的次序和时间间隔不同:(u a0
=64.4km/h)
⑴前轮比后轮先抱死,或后轮比前轮先抱死的时间间隔<0.5s
——不会侧滑,但前轮失去转向
⑵后轮比前轮先抱死的时间间隔>0.5s
——严重侧滑;
4、起始车速u a0和附着系数φ的影响:
⑴u a0:
只有u a0>u a1时,后轴侧滑才成为一种危险的侧滑。
⑵φ:φ↘→侧滑程度↗
原因:φ↘→制动时间↗→侧滑程度↗
试验结论:
1、制动过程中,若只有前轮抱死、或前轮先抱死,汽车不侧滑(稳定状态),
但丧失转向能力;
2、若后轮比前轮提前一定时间先抱死,且u a0>u a1时,汽车在轻微侧向力作用下
就会侧滑。
路面愈滑、制动距离和制动时间愈长,后轴侧滑愈剧烈。
(一)受力分析:
1、前轮抱死、后轮滚动:
在侧向力作用下,前轴侧滑使汽车转向,离心力F j与侧滑方向相反,F j减小或抑制侧滑——稳定工况
2、后轮抱死、前轮滚动:
在侧向力作用下,后轴侧滑使汽车转向,离心力F j与侧滑方向相同,F j加剧后轴侧滑——非稳定工况(危险)
(二)结论:
为保证制动方向稳定性,
首先,不能出现:只有后轮抱死、或后轮比前轮先抱死的情况,以防止危险的后轴侧滑;
其次,尽量少出现:只有前轮抱死、或前后轮都抱死的情况,以维持汽车的转向能力;
最理想的情况:防止任何车轮抱死。
(三)出现后轴侧滑时的解决办法:
——松制动,并向侧滑方向打方向。