测绘技术之坐标反算与正算
- 格式:rtf
- 大小:334.95 KB
- 文档页数:11
坐标正算和坐标反算名词解释
坐标正算和坐标反算是地理学和测量学中两个重要的术语,用于描述地球上某一地点的确定和定位。
坐标正算(Forward Calculation)是指根据已知的地理坐标系统或投影坐标系统的参数,通过数学计算得出地球上某一点的具体位置。
这一过程通常涉及到大地测量技术、三角测量和测量学等方法。
坐标正算被广泛应用于地图制作、导航系统、地理信息系统(GIS)等领域。
坐标反算(Inverse Calculation)是指通过已知地球上某一点的经纬度或投影坐标,利用反向的数学计算方法得出该点所在的地理或投影坐标系统的参数。
坐标反算可用于测量点的地理位置的确定,具体应用包括GPS定位系统、地图制作、地理勘测等领域。
坐标正算和坐标反算分别描述了地球上某一点的确定和定位过程。
坐标正算通过已知的参数计算出具体位置,而坐标反算则通过已知的位置反向计算出相应的参数。
这两个概念在地理学和测量学中起着重要的作用,为地理信息系统和定位导航系统等提供了基础支持。
坐标正反算定义及公式一、坐标正算(地理坐标转平面坐标)坐标正算是将地球上的地理坐标(经纬度)转换为平面坐标(笛卡尔坐标或者极坐标)。
坐标正算是地图制图的一项基本工作。
1.大地参考椭球体模型在进行坐标正算之前,需要先定义一个大地参考椭球体模型,用于近似地球的形状。
常用的大地参考椭球体模型有WGS84、北京54等。
这些模型定义了地球的椭球体参数,如长半轴、扁率等。
2.经度、纬度的度分秒表示法地理坐标通常使用度分秒表示法来表示经度和纬度。
经度是以东西方向为正负,以本初子午线(通常是格林威治子午线)为基准;纬度是以南北方向为正负,以赤道为基准。
3.大地坐标系和平面坐标系大地坐标系是地球表面的经纬度坐标系,平面坐标系是一个笛卡尔坐标系或者极坐标系,用于表示地球表面的平面位置。
4.坐标正算公式坐标正算的公式根据大地参考椭球体模型的不同而有所不同,这里以WGS84椭球体模型为例。
假设待转换的地理坐标是经度λ、纬度φ,转换后的平面坐标是X、Y。
首先,计算出椭球体的参数e:e=√(a^2-b^2)/a其中,a是椭球体的长半轴,b是椭球体的短半轴。
然后,计算出曲率半径N:N = a / √(1 - e^2 * sin^2(φ))接着,计算出当前点的平面坐标:X = (N + h) * cos(φ) * cos(λ)Y = (N + h) * cos(φ) * sin(λ)其中,h是当前点的海拔高度。
以上就是坐标正算的基本公式,可以将地理坐标转换为平面坐标。
二、坐标反算(平面坐标转地理坐标)坐标反算是将平面坐标(笛卡尔坐标或者极坐标)转换为地理坐标(经纬度)。
坐标反算是地图制图或者位置定位的一项重要工作。
1.平面坐标的原点和单位平面坐标通常以其中一点为原点,单位长度为米或者其他距离单位。
原点可以在任意位置,但是通常选择区域的中心或者其中一突出地物为原点。
2.坐标反算的过程坐标反算的过程是根据平面坐标和大地参考椭球体模型,计算出对应的地理坐标。
坐标反算正算计算公式一、坐标正算根据A点的坐标X A、Y A和直线AB的水平距离D AB与坐标方位角O AB,推算B点的坐标X B、Y B,为坐标正算,其计算公式为:X B = X A + AX ABY B = X A + AY AB(1-18 )二式中,AX AB与AY AB分别称为A〜B的纵、横坐标增量,其计算公式为:AXAB = X B—X A = D AB COS O ABAYAB = Y B—Y A = D AB sin O AB(1-19)注意,AX AB和AY AB均有正、负,其符号取决于直线AB的坐标方位角所在的象限。
二、坐标反算根据A、B两点的坐标X A、Y A和X B、Y B,推算直线AB的水平距离D AB与坐标方位角OCAB ,为坐标反算。
其计算公式为:(1-20 )注意,由(1-20 )式计算OCAB时往往得到的是象限角的数值,必须先根据AX AB、AY AB的正、负号,确定直线AB所在的象限,再将象限角换算为坐标方位角。
三角函数内容规律三角函数看似很多,很复杂,但只要掌握了三角函数的本质及内部规律就会发现三角函数各个公式之间有强大的联系。
而掌握三角函数的内部规律及本质也是学好三角函数的关键所在.1、三角函数本质:三角函数的本质来源于定义,如右图:根据右图,有sin 0 =y/ R; cos 0 =x/R; tan 0 =y/x; cot 0 =x/y。
深刻理解了这一点,下面所有的三角公式都可以从这里出发推导出来,比如以推导si n( A+B) = si nAcosB+cosAs inB 为例:推导:首先画单位圆交X轴于C,D,在单位圆上有任意A,B点。
角AOD为a,BOD为B,旋转AOB使0B与0D重合,形成新A'OD。
A(cos a ,sin a ),B(cos 3 ,sin 3 ),A'(cos( - BM,sin( 诩)) OA'=OA=OB=OD=1,D(1,0) [cos( a- 3 >1]A2+[sin( a- 3 )]A2=(cos a cos 3 )A2+(sin a-sin3 )A2和差化积及积化和差用还原法结合上面公式可推出(换(a+b)/2与(a-b)/2 )[1](1-21 )两角和公式sin( A+B) = sin AcosB+cosAs inB sin (A-B) = sin AcosB- COSAsinB cos(A+B) = cosAcosB-s inAsinB cos(A-B) = cosAcosB+si nAsi nB tan (A+B) = (ta nA+ta nB)/(1-ta nAta nB)ta n( A-B) = (ta nA-ta nB)/(1+ta nAta nB)cot(A+B) = (cotAcotB- 1 )/(COtB + COtA) cot(A-B) = (cotAcotB+1)/(cotB-cotA)[]倍角公式Si n2A=2Si nA?CosACos2A=CosA A2-Si nA^2=1-2Si nAA2=2CosAA2-1tan 2A=2ta nA/ (1-tanAA2 )是sinA的平方sin2 (A))(注:Si nAA2[]三倍角公式sin3 a =4sin a-sin( n /3+ a )sin( n/)cos3 a =4cos a-cos( n /3+ a )cos( n /3a )tan3a = tan a • tan( n /3+a) • tan( n /3-a)[]三倍角公式推导sin 3a=sin( 2a+a)=sin 2acosa+cos2as ina=2s in a(1-s in& sup2;a)+(1-2s in& sup2;a)s ina=3s in a-4s in³acos3a=cos(2a+a)=cos2acosa-s in 2as ina=(2cos²a-1)cosa-2(1-s in& sup2;a)cosa=4cos³a-3cosasin 3a=3s in a-4s in& sup3;a=4si na(3/4-si n& sup2;a)=4sina[( V3/2)² -sin²a]=4sina(sin²60 °-sin²a)=4sina(sin60 °+sina)(sin60 °-sina)°)/2]}=4sina*2sin[(60+a)/2]cos[(60 °-a)/2]*2sin[(60 °-a)/2]cos[(60 °-a)/2]=4sinasin(60 °+a)sin(60 °-a) cos3a=4cos³a-3cosa =4cosa(cos²a-3/4) =4cosa[cos²a-(V 3/2) ²]=4cosa(cos²a-cos²30 °)=4cosa(cosa+cos30° )(cosa-cos30 °) =4cosa*2cos[(a+30 ° )/2]cos[(a-30 °)/2]*{-2sin[(a+30°)/2]sin[(a-30=-4cosasin(a+30 ° )sin(a-30 °) =-4cosasin[90 °-(60 °-a)]sin[-90 °+(60°+a)]=-4cosacos(60 ° -a)[-cos(60 °+a)] =4cosacos(60° -a)cos(60 °+a) 上述两式相比可得tan3a=tanatan(60 ° -a)tan(60 °+a) []半角公式tan(A/2)=(1-cosA)/sinA=sinA/(1+cosA); cot(A/2)=sinA/(1-cosA)=(1+cosA)/sinA. []和差化积sin 0 +sin $ = 2sin[( 0 + )/2]cos[( - © )/2]sin 0-sin © = 2cos[( 0 + © )/2]sin[( - © )/2] cos 0+cos © = 2cos[( 0+©)/2]cos[( -0©)/2] cos 0-cos © = -2sin[( 0+©)/2]sin[( -©0)/2] tanA+tanB=sin(A+B)/cosAcosB=tan(A+B)(1-tanAtanB) []积化和差sin a sin 3 = -1/2*[cos( a + 3-)cos( a - 3 )] cos a cos 3 = 1/2*[cos( a +3)+cos( a -3)] sin a cos 3 = 1/2*[sin( a +3)+sin( -a3)] cos a sin 3 = 1/2*[sin(a +3-s )in( a -3)][]诱导公式sin(- a ) = -sin acos(- a ) =cos aSin( n /2- a ) = -COS a cos( n /2 - a ) = sin a Sin( n /2+ a )= COS a cos( n /2+ a ) = -sin asin( n- a ) = sin a COs( n - a ) = -COs a sin( n + a ) = -sin a cos( n + a ) = -cos a tanA=sinA/COsA tan ( n /2 + a) =—cot a tan ( n /2 — a) = cot a tan ( n — a) =—tan a tan ( n+ a) = tan a[][](sin a )A2+(cos a )A2=11+(tan a )A2=(sec a )人21+(cot a)A2=(csc a)A2证明下面两式,只需将一式,左右同除(sin a )A2第二个除(COS a )A2即可对于任意非直角三角形,总有tanA+tanB+tanC=tanAtanBtanC证:A+B=^ -Ctan(A+B)=tan( n -C)(tanA+tanB)/(1- tanAtanB)=(tan n -tanC)/(1+tan n tanC)整理可得tanA+tanB+tanC=tanAtanBtanC得证同样可以得证,当x+y+z=n n (n € Z)时,该关系式也成立[]其他非重点三角函数csc(a) = 1/sin(a)sec(a) = 1/cos(a) []双曲函数sin h(a) = [e A a-e A(-a)]/2COSh(a) = [eAa+eA(-a)]/2tg h(a) = Sin h(a)/COS h(a)公式一:设a为任意角,终边相同的角的同一二角函数的值相等:sin ( 2k n + a)=sin aCOS ( 2k n+ a) = COS atan ( k n + a)=tan acot ( k n+ a)=COt a公式二:设a为任意角,n + a的三角函数值与a的三角函数值之间的关系sin ( n+ a)= :-sin aCOS ( n+ a):=-COS atan ( n+ a)= tan aCOt ( n+ a)= COt a公式二:任意角a与- a的三角函数值之间的关系:sin (- a) = -sin aCOS ( -a) = COS atan (- a) = -tan aCOt (-a)= -COt a公式四:利用公式—和公式二可以得到n- a与a的三角函数值之间的关系sin ( n- a)= Sin aCOS ( n- a)= -COS atan ( n- a)= -tan aCOt ( n- a)= -COt a公式五:利用公式-和公式二可以得到 2 n - a与a的三角函数值之间的关系:Sin ( 2 n- a)= -Sin aCOS ( 2 n- a)= COS atan ( 2 n- a)= -tan aCOt ( 2 n- a)= -COt a公式六:n /2 土及3 n /2 ±a与a的二角函数值之间的关系:Sin ( n /2+ a) = COS aCOS ( n /2+ a) = -sin atan (n /2+ a = -COt a cot (n /2+ a = -ta n a sin((n /2- a)= COs a cos (n /2- a)= sin a tan (n /2- a)= COt a cot (n /2- a)= tan a sin((3 n /2+ a )=-COs a cos (3 n /2+ a)=sin a tan (3 n /2+ a )=-COt a cot (3 n /2+ a )=-tan a sin((3 n /2- a):=-COS a cos (3n /2- a)= -sin a tan (3n /2- a)= COt a cot (3n /2- a):= tan a (以上k € Z)这个物理常用公式我费了半天的劲才输进来A • sin( 31+ 0 )+B - sin( w t+ $ = v{(A A2+B A2 +2ABc os( 0- $ )} ? sin { +B A2; +2ABcos( 0 - $ )} }~表示根号,包括{ .... }中的内容,希望对大家有用w t + arcsin[ (A?sin 0 +B?sin $ ) / V{人人2。
工程测量坐标正反算公式工程测量坐标正反算公式是指基于已知控制点坐标和测量仪器测量数据,通过计算获得被测物体或地形的坐标点。
在这个过程中,正算指的是从控制点计算被测点坐标的过程,而反算则是从已知被测点坐标计算控制点坐标的过程。
在本文中,我将详细介绍工程测量坐标正反算公式的原理和实际应用场景。
一、工程测量坐标正反算公式原理工程测量坐标正反算公式的原理主要是基于三角测量和距离测量原理。
三角测量法利用三角形的几何关系,通过测量三角形内角或边长,计算出三角形的各个顶点坐标。
而距离测量法则是通过测量被测物体或地形与仪器的距离,然后利用三角函数计算出被测物体或地形的坐标。
在实际工作中,测量仪器主要有全站仪、经纬仪、水准仪和电子测距仪等。
全站仪是一种常用的测量仪器,它可以测量水平角、垂直角和斜距,并输出相应的坐标值。
而经纬仪则是一种测量方位角和高度差的仪器,它常用于野外导线路线测量;水准仪则用于测量高差,电子测距仪则用于测量地形点到仪器的直线距离。
在进行工程测量坐标正反算时,需要先确定控制点坐标。
控制点分为基准控制点和工作控制点,基准控制点是指通过已知的测量结果或GPS测量等方式已知其坐标的点,而工作控制点则是在进行实测工作时测量得到的坐标点。
基准控制点与工作控制点之间的坐标关系构成了控制网络,该网络是工程测量的基础。
对于工程测量坐标正算来说,可以利用如下公式计算:X = XC + D × cos(V)Y = YC + D × sin(V) × cos(H)Z = ZC + D × sin(V) × sin(H) + hX、Y、Z为被测点的坐标;XC、YC、ZC为控制点的坐标;D为控制点与被测点的距离;V为控制点与被测点之间的垂直角;H为控制点与被测点之间的水平角;h为控制点与被测点之间的高差。
该公式利用三角函数计算出被测点的坐标,精度高且适用于不同的测量场景。
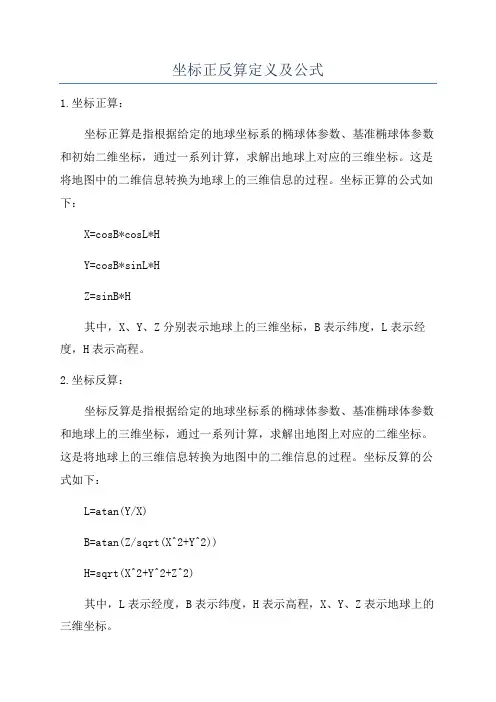
坐标正反算定义及公式1.坐标正算:坐标正算是指根据给定的地球坐标系的椭球体参数、基准椭球体参数和初始二维坐标,通过一系列计算,求解出地球上对应的三维坐标。
这是将地图中的二维信息转换为地球上的三维信息的过程。
坐标正算的公式如下:X=cosB*cosL*HY=cosB*sinL*HZ=sinB*H其中,X、Y、Z分别表示地球上的三维坐标,B表示纬度,L表示经度,H表示高程。
2.坐标反算:坐标反算是指根据给定的地球坐标系的椭球体参数、基准椭球体参数和地球上的三维坐标,通过一系列计算,求解出地图上对应的二维坐标。
这是将地球上的三维信息转换为地图中的二维信息的过程。
坐标反算的公式如下:L=atan(Y/X)B=atan(Z/sqrt(X^2+Y^2))H=sqrt(X^2+Y^2+Z^2)其中,L表示经度,B表示纬度,H表示高程,X、Y、Z表示地球上的三维坐标。
在坐标正反算中,还需要考虑一些特殊情况,如椭球体的椭率偏差、大地基准面的形状等。
根据这些特殊情况,需要进行一些修正和适用于不同地区的公式。
此外,还有其他一些常见的坐标系统,如平面坐标系统、高斯投影坐标等,它们都有相应的坐标正反算公式。
值得注意的是,坐标正反算在实际应用中非常广泛,例如地图的绘制、GPS定位、导航系统等都需要通过坐标正反算来实现。
因此,熟练掌握坐标正反算的原理和公式对于地理信息专业人员至关重要。
总之,坐标正反算是将地图上的二维坐标与地球上的三维坐标相互转换的过程。
通过实际坐标的正算,可以确定地球上的位置,而通过坐标的反算,可以确定地图上的位置。
坐标正反算是地理信息系统中的一项重要技术,对于许多实际应用具有重要意义。

坐标反算正算计算公式坐标反算和正算是地理测量学中常见的问题,用于计算地球表面上两点之间的距离、方位角和坐标。
坐标反算是根据已知的两个地点的经纬度和距离,来计算出另一个点的经纬度坐标。
坐标正算则是根据已知的一个地点的经纬度和另一个地点的方位角和距离,来计算出第二个地点的经纬度坐标。
下面简单介绍一下坐标反算和正算的计算公式。
坐标反算坐标反算通常用于计算两点间的距离和方位角。
1.距离计算两点间的距离可以通过公式:D = 2 * R * asin(sqrt(sin((lat2-lat1)/2)^2 + cos(lat1) * cos(lat2) * sin((lon2-lon1)/2)^2))其中,lat1和lon1为第一个点的经纬度,lat2和lon2为第二个点的经纬度,R为地球平均半径。
2.方位角计算两点间的方位角可以通过公式:brng = atan2(sin(lon2-lon1) * cos(lat2), cos(lat1) * sin(lat2) - sin(lat1) * cos(lat2) *cos(lon2-lon1))其中,lat1和lon1为第一个点的经纬度,lat2和lon2为第二个点的经纬度。
坐标正算坐标正算通常用于根据已知一个点的经纬度和另一个点的方位角和距离,计算出第二个点的经纬度。
1.纬度计算第二个点的纬度可以通过公式:lat2 = asin(sin(lat1) * cos(d/R) + cos(lat1) * sin(d/R) * cos(brng))其中,lat1为第一个点的纬度,d为距离,R为地球平均半径,brng 为方位角。
2.经度计算第二个点的经度可以通过公式:lon2 = lon1 + atan2(sin(brng) * sin(d/R) * cos(lat1), cos(d/R) - sin(lat1) * sin(lat2))其中,lon1为第一个点的经度,d为距离,R为地球平均半径,brng 为方位角。
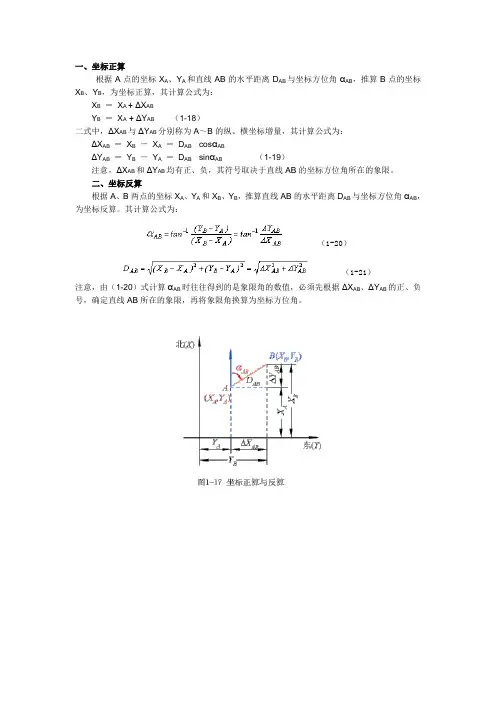
一、坐标正算根据A点的坐标X A、Y A和直线AB的水平距离D AB与坐标方位角αAB,推算B点的坐标X B、Y B,为坐标正算,其计算公式为:X B=X A + ΔX ABY B=X A+ ΔY AB(1-18)二式中,ΔX AB与ΔY AB分别称为A~B的纵、横坐标增量,其计算公式为:ΔX AB=X B-X A=D AB · cosαABΔY AB=Y B-Y A=D AB · sinαAB(1-19)注意,ΔX AB和ΔY AB均有正、负,其符号取决于直线AB的坐标方位角所在的象限。
二、坐标反算根据A、B两点的坐标X A、Y A和X B、Y B,推算直线AB的水平距离D AB与坐标方位角αAB,为坐标反算。
其计算公式为:(1-20)(1-21)注意,由(1-20)式计算αAB时往往得到的是象限角的数值,必须先根据ΔX AB、ΔY AB的正、负号,确定直线AB所在的象限,再将象限角换算为坐标方位角。
三角函数内容规律三角函数看似很多,很复杂,但只要掌握了三角函数的本质及内部规律就会发现三角函数各个公式之间有强大的联系。
而掌握三角函数的内部规律及本质也是学好三角函数的关键所在.1、三角函数本质:三角函数的本质来源于定义,如右图:根据右图,有sinθ=y/ R; cosθ=x/R; tanθ=y/x; cotθ=x/y。
深刻理解了这一点,下面所有的三角公式都可以从这里出发推导出来,比如以推导sin(A+B) = sinAcosB+cosAsinB 为例:推导:首先画单位圆交X轴于C,D,在单位圆上有任意A,B点。
角AOD为α,BO D为β,旋转AOB使OB与OD重合,形成新A'OD。
A(cosα,sinα),B(cosβ,sinβ),A'(cos(α-β),sin(α-β))OA'=OA=OB=OD=1,D(1,0)∴[cos(α-β)-1]^2+[sin(α-β)]^2=(cosα-cosβ)^2+(sinα-sinβ)^2和差化积及积化和差用还原法结合上面公式可推出(换(a+b)/2与(a-b)/2)[1]两角和公式sin(A+B) = sinAcosB+cosAsinBsin(A-B) = sinAcosB-cosAsinBcos(A+B) = cosAcosB-sinAsinBcos(A-B) = cosAcosB+sinAsinBtan(A+B) = (tanA+tanB)/(1-tanAtanB)tan(A-B) = (tanA-tanB)/(1+tanAtanB)cot(A+B) = (cotAcotB-1)/(cotB+cotA)cot(A-B) = (cotAcotB+1)/(cotB-cotA)[编辑本段]倍角公式Sin2A=2SinA•CosACos2A=CosA^2-SinA^2=1-2SinA^2=2CosA^2-1 tan2A=2tanA/(1-tanA^2)(注:SinA^2 是sinA的平方sin2(A))[编辑本段]三倍角公式sin3α=4sinα·sin(π/3+α)sin(π/3-α)cos3α=4cosα·cos(π/3+α)cos(π/3-α)tan3a = tan a · tan(π/3+a)· tan(π/3-a)[编辑本段]三倍角公式推导sin3a=sin(2a+a)=sin2acosa+cos2asina=2sina(1-sin²a)+(1-2sin²a)sina=3sina-4sin³acos3a=cos(2a+a)=cos2acosa-sin2asina=(2cos²a-1)cosa-2(1-sin²a)cosa=4cos³a-3cosasin3a=3sina-4sin³a=4sina(3/4-sin²a)=4sina[(√3/2)²-sin²a]=4sina(sin²60°-sin²a)=4sina(sin60°+sina)(sin60°-sina)=4sina*2sin[(60+a)/2]cos[(60°-a)/2]*2sin[(60°-a)/2]cos[(60°-a)/2]=4sinasin(60°+a)sin(60°-a)cos3a=4cos³a-3cosa=4cosa(cos²a-3/4)=4cosa[cos²a-(√3/2)²]=4cosa(cos²a-cos²30°)=4cosa(cosa+cos30°)(cosa-cos30°)=4cosa*2cos[(a+30°)/2]cos[(a-30°)/2]*{-2sin[(a+30°)/2]sin[(a-30°)/2]} =-4cosasin(a+30°)sin(a-30°)=-4cosasin[90°-(60°-a)]sin[-90°+(60°+a)]=-4cosacos(60°-a)[-cos(60°+a)]=4cosacos(60°-a)cos(60°+a)上述两式相比可得tan3a=tanatan(60°-a)tan(60°+a)[编辑本段]半角公式tan(A/2)=(1-cosA)/sinA=sinA/(1+cosA);cot(A/2)=sinA/(1-cosA)=(1+cosA)/sinA.[编辑本段]和差化积sinθ+sinφ = 2sin[(θ+φ)/2]cos[(θ-φ)/2]sinθ-sinφ = 2cos[(θ+φ)/2]sin[(θ-φ)/2]cosθ+cosφ = 2cos[(θ+φ)/2]cos[(θ-φ)/2]cosθ-cosφ = -2sin[(θ+φ)/2]sin[(θ-φ)/2]tanA+tanB=sin(A+B)/cosAcosB=tan(A+B)(1-tanAtanB)[编辑本段]积化和差sinαsinβ = -1/2*[cos(α+β)-cos(α-β)]cosαcosβ = 1/2*[cos(α+β)+cos(α-β)]sinαcosβ = 1/2*[sin(α+β)+sin(α-β)]cosαsinβ = 1/2*[sin(α+β)-sin(α-β)] [编辑本段]诱导公式sin(-α) = -sinαcos(-α) = cosαsin(π/2-α) = -cosαcos(π/2-α) = sinαsin(π/2+α) = cosαcos(π/2+α) = -sinαsin(π-α) = sinαcos(π-α) = -cosαsin(π+α) = -sinαcos(π+α) = -cosαtanA= sinA/cosAtan(π/2+α)=-cotαtan(π/2-α)=cotαtan(π-α)=-tanαtan(π+α)=tanα[编辑本段]万能公式[编辑本段]其它公式(sinα)^2+(cosα)^2=11+(tanα)^2=(secα)^21+(cotα)^2=(cscα)^2证明下面两式,只需将一式,左右同除(sinα)^2,第二个除(cosα)^2即可对于任意非直角三角形,总有tanA+tanB+tanC=tanAtanBtanC证:A+B=π-Ctan(A+B)=tan(π-C)(tanA+tanB)/(1-tanAtanB)=(tanπ-tanC)/(1+tanπtanC)整理可得tanA+tanB+tanC=tanAtanBtanC得证同样可以得证,当x+y+z=nπ(n∈Z)时,该关系式也成立[编辑本段]其他非重点三角函数csc(a) = 1/sin(a)sec(a) = 1/cos(a)[编辑本段]双曲函数sinh(a) = [e^a-e^(-a)]/2cosh(a) = [e^a+e^(-a)]/2tg h(a) = sin h(a)/cos h(a)公式一:设α为任意角,终边相同的角的同一三角函数的值相等:sin(2kπ+α)= sinαcos(2kπ+α)= cosαcot(kπ+α)= cotα公式二:设α为任意角,π+α的三角函数值与α的三角函数值之间的关系:sin(π+α)= -sinαcos(π+α)= -cosαtan(π+α)= tanαcot(π+α)= cotα公式三:任意角α与-α的三角函数值之间的关系:sin(-α)= -sinαcos(-α)= cosαtan(-α)= -tanαcot(-α)= -cotα公式四:利用公式二和公式三可以得到π-α与α的三角函数值之间的关系:sin(π-α)= sinαcos(π-α)= -cosαtan(π-α)= -tanαcot(π-α)= -cotα公式五:利用公式-和公式三可以得到2π-α与α的三角函数值之间的关系:sin(2π-α)= -sinαcos(2π-α)= cosαtan(2π-α)= -tanαcot(2π-α)= -cotα公式六:π/2±α及3π/2±α与α的三角函数值之间的关系:sin(π/2+α)= cosαcos(π/2+α)= -sinαtan(π/2+α)= -cotαcot(π/2+α)= -tanαsin(π/2-α)= cosαcos(π/2-α)= sinαtan(π/2-α)= cotαcot(π/2-α)= tanαsin(3π/2+α)= -cosαcos(3π/2+α)= sinαcot(3π/2+α)= -tanαsin(3π/2-α)= -cosαcos(3π/2-α)= -sinαtan(3π/2-α)= cotαcot(3π/2-α)= tanα(以上k∈Z)这个物理常用公式我费了半天的劲才输进来,希望对大家有用A·sin(ωt+θ)+ B·sin(ωt+φ) =√{(A^2 +B^2 +2ABcos(θ-φ)} • sin{ωt + arcsin[ (A•sinθ+B•sinφ) / √{A^2 +B^2; +2ABcos(θ-φ)} }√表示根号,包括{……}中的内容。
坐标正算和坐标反算的原理及应用一、坐标正算坐标正算是指根据给定的点坐标和直线之间的水平距离 DAB 与坐标方位角 AB,推算出另一条直线的坐标方位角 AB 和水平距离DAB 的方法。
坐标正算的计算公式为:XB = XA + DAB·cos(AB)YB = YA + DAB·sin(AB)其中,XB 和 YB 分别称为 A~B 的纵、横坐标增量,XA、YA 分别是直线 AB 的起点和终点的坐标,DAB 是直线 AB 的水平距离。
需要注意,XB 和 YB 均有正、负号,其符号取决于直线 AB 的坐标方位角所在的象限。
二、坐标反算坐标反算是指根据给定的两个点坐标和直线之间的水平距离DAB,推算出直线 AB 的坐标方位角 AB 和水平距离 DAB 的方法。
坐标反算的计算公式为:AB = (YB - YA) / (XB - XA) - 90°其中,AB 是直线 AB 的坐标方位角,XB、YA 分别是直线 AB 的起点和终点的坐标,YB 和 XA 分别是 A~B 和 B~A 的横纵坐标增量。
需要注意,坐标反算得到的方位角是一个锐角,必须先根据 YB-YA 与 XB-XA 的正负号,确定直线 AB 所在的象限,再将象限角换算为坐标方位角。
三、坐标正算和坐标反算的应用坐标正算和坐标反算在实际应用中有着广泛的应用,下面列举几个典型的应用:1. 航空航天领域:在航空航天领域中,坐标正算和坐标反算被用来确定飞行器的位置和方向,从而确保飞行器的安全和准确性。
2. 机械设计领域:在机械设计中,坐标正算和坐标反算被用来计算机械零部件的位置和方向,从而确保机械设计的精确性和合理性。
3. 地理信息系统:在地理信息系统中,坐标正算和坐标反算被用来确定地图中各个点的位置和方向,从而支持地图数据的采集、管理和分析。
4. 机器人领域:在机器人领域中,坐标正算和坐标反算被用来确定机器人的位置和方向,从而确保机器人的准确移动和作业。
坐标正算反算公式讲解坐标正算和反算是地理信息系统(GIS)中两个常用的操作,用于将地理坐标转换为平面坐标(正算)或将平面坐标转换为地理坐标(反算)。
这两个操作在测量、绘图、导航、定位等领域都有广泛的应用。
下面是对坐标正算和反算公式的详细讲解。
一、坐标正算公式坐标正算是将地理坐标(经纬度)转换为平面坐标(XY坐标)。
在坐标正算中,我们需要用到投影坐标系和大地坐标系之间的转换公式。
1.地理坐标系地理坐标系使用经度和纬度来表示地球上的点。
经度是指从地球圆心到其中一点的经线弧度长度与赤道弧度长度的比值,范围为-180到180度;纬度是指从地球赤道到其中一点的纬线弧度长度与半径的比值,范围为-90到90度。
2.投影坐标系投影坐标系是将地理坐标投影到平面坐标系上的一种方法。
根据需要,可以选择不同的投影方式,例如等角、等面积、等距、等分四类等。
每个投影方式都有其特点,选用不同的投影方式可以满足不同的需求。
3.原理坐标正算的原理是根据地理坐标系中点的经纬度和投影坐标系中原点的经纬度之间的差异,通过一定的计算公式将地理坐标系中的点坐标转换为投影坐标系中的点坐标。
4.具体步骤(1)选择合适的投影坐标系,确定原点和偏移量。
(2)计算地理坐标系中点的经纬度与原点经纬度的差值。
(3)利用投影坐标系的转换公式,将差值转换为平面坐标。
5.常用坐标正算公式常用的坐标正算公式包括高程改正公式、大地坐标系转换公式、高斯投影正算公式等。
二、坐标反算公式坐标反算是将平面坐标(XY坐标)转换为地理坐标(经纬度)。
在坐标反算中,我们需要用到投影坐标系和大地坐标系之间的反转换公式。
1.原理坐标反算的原理是根据投影坐标系中点的坐标和大地坐标系中原点的经纬度之间的差异,通过一定的计算公式将平面坐标系中的点坐标转换为地理坐标系中的点坐标。
2.具体步骤(1)选择合适的投影坐标系,确定原点和偏移量。
(2)计算平面坐标系中点的坐标与原点坐标的差值。
(3)利用投影坐标系的反转换公式,将差值转换为地理坐标。
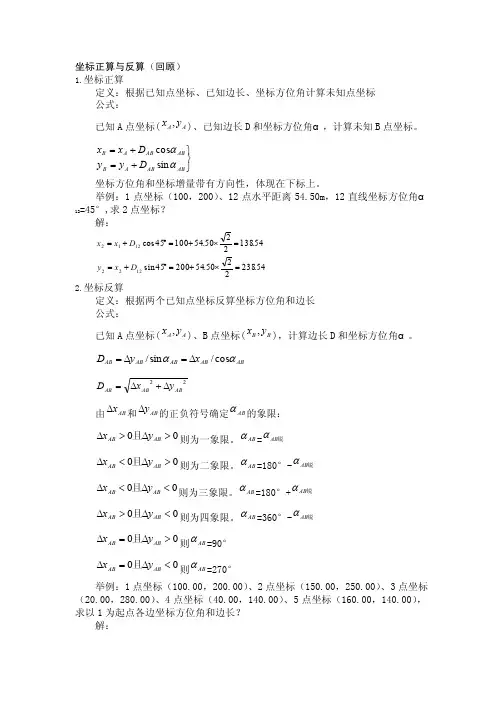
坐标正算与反算(回顾)1.坐标正算定义:根据已知点坐标、已知边长、坐标方位角计算未知点坐标公式:已知A 点坐标(A A y x ,)、已知边长D 和坐标方位角α,计算未知B 点坐标。
⎭⎬⎫+=+=AB AB A B AB AB A B D y y D x x ααsin cos坐标方位角和坐标增量带有方向性,体现在下标上。
举例:1点坐标(100,200)、12点水平距离54.50m ,12直线坐标方位角α12=45°,求2点坐标?解:54.2382250.5420045sin 54.1382250.5410045cos 12221212=⨯+=︒+==⨯+=︒+=D x y D x x2.坐标反算定义:根据两个已知点坐标反算坐标方位角和边长公式:已知A 点坐标(A A y x ,)、B 点坐标(B B y x ,),计算边长D 和坐标方位角α。
AB AB AB AB AB x y D ααcos /sin /∆=∆=22AB AB AB y x D ∆+∆=由AB x ∆和AB y ∆的正负符号确定AB α的象限:00>∆>∆AB AB y x 且则为一象限。
AB α=锐AB α00>∆<∆AB AB y x 且则为二象限。
AB α=180°-锐AB α00<∆<∆AB AB y x 且则为三象限。
AB α=180°+锐AB α00<∆>∆AB AB y x 且则为四象限。
AB α=360°-锐AB α00>∆=∆AB AB y x 且则AB α=90°00<∆=∆AB AB y x 且则AB α=270°举例:1点坐标(100.00,200.00)、2点坐标(150.00,250.00)、3点坐标(20.00,280.00)、4点坐标(40.00,140.00)、5点坐标(160.00,140.00),求以1为起点各边坐标方位角和边长?解:,Ⅳ,Ⅲ,Ⅱ)(,Ⅰ︒-==--=∆∆==-+-=︒==--=∆∆==-+-=︒-=-=--=∆∆==-+-=︒==--=∆∆==-+-=451arctan 00.10000.17000.20000.130arctan99.98)00.20000.130()00.10000.170(451arctan 00.10000.4000.20000.140arctan 85.84)00.20000.140()00.10000.40(451arctan 00.10000.2000.20000.280arctan 14.113)00.20000.280()00.10000.20(451arctan 00.10000.15000.20000.250arctan 71.70)00.20000.250()00.10000.150(2212221222122212AB AB AB AB AB AB AB AB AB AB AB AB x y m D x y mD x y m D x y m D αααα。
测量学坐标正反算测量学是一门致力于研究测量方法和技术的学科,广泛应用于各个领域,如工程测量、地理测量、建筑测量等。
在测量学中,坐标正反算是一项重要的工作,用于确定任意点在坐标系统中的位置。
坐标系统简介在测量学中,坐标系统是一种用来描述和表示空间点位置的一种数学模型。
坐标系统通常由坐标系和坐标轴组成。
坐标系是一个框架,用来确定点的位置。
坐标轴则是坐标系的辅助线,用来定位具体的点。
常见的坐标系统有笛卡尔坐标系和极坐标系。
在笛卡尔坐标系中,一个点的位置可以由其在水平和垂直方向上的坐标表示。
而在极坐标系中,一个点的位置则由其距离原点的径向距离和与特定方向的角度表示。
坐标的正算在测量学中,坐标的正算是指已知一个点的坐标系中的坐标,通过测量和计算得到该点在其他坐标系中的坐标的过程。
正算的目的是确定点在其他坐标系中的位置,以便进行进一步的计算或分析。
坐标的正算通常涉及从已知坐标系到未知坐标系的转换。
这个转换过程可以使用一些数学模型和算法完成。
例如,在平面测量中,可以使用旋转和平移等几何变换来进行坐标的正算。
坐标的反算坐标的反算是指已知一个点在一个坐标系中的坐标,通过测量和计算得到该点在另一个坐标系中的坐标的过程。
反算的目的是确定点在其他坐标系中的位置,以便进行进一步的计算或分析。
坐标的反算也需要使用一些数学模型和算法。
在平面测量中,常用的反算方法包括旋转和平移等几何变换。
通过这些变换,可以将点在一个坐标系中的坐标转换为在另一个坐标系中的坐标。
坐标正反算的应用测量学坐标正反算在实际应用中具有广泛的用途。
在工程测量中,测量人员可以通过坐标的正反算来确定不同点的位置,以便进行工程规划和设计。
此外,在地理测量中,坐标的正反算也是常见的任务。
通过坐标的正反算,地理学家可以确定地球上不同地点的位置,而不论是经度和纬度表示的极坐标系,还是平面坐标系,都可以应用于地理测量中。
总之,测量学坐标正反算是测量学中重要的一环,用于确定点在不同坐标系中的位置。
坐标反算公式范文坐标反算是指通过已知的方位角和距离,计算出目标点的坐标。
在测量、地理和导航领域中,坐标反算是一项重要的计算方式。
下面将介绍两种常用的坐标反算公式:正算和反算。
1.正算正算是指已知起点坐标、方位角和距离,计算目标点坐标的过程。
正算的公式如下:目标点纬度 = 起点纬度 + (距离 * sin(方位角)) / 地球半径目标点经度 = 起点经度 + (距离 * cos(方位角)) / (地球半径 * cos(起点纬度))其中,起点纬度和经度为已知的起点坐标,方位角为起点指向目标点的方向角度,距离为起点到目标点的直线距离,地球半径是一个近似值,可以根据实际情况选择适当的数值,通常为6371.0公里。
2.反算反算是指已知起点坐标和目标点坐标,计算方位角和距离的过程。
反算的公式如下:Δ经度=目标点经度-起点经度Δ纬度=目标点纬度-起点纬度距离= sqrt((Δ经度* Δ经度 * cos(起点纬度))^2 + Δ纬度^2) * 地球半径方位角= atan2(Δ经度 * cos(起点纬度), Δ纬度)其中,起点纬度和经度为已知的起点坐标,目标点纬度和经度为需要计算的目标点坐标,Δ经度和Δ纬度为两点间经度和纬度偏移,地球半径与前面的正算公式相同。
需要注意的是,上述公式中所有的角度都以弧度为单位,所以在计算前需要将角度转换为弧度,如果结果需要以角度形式表示,可以将计算结果进行角度转换。
这是一种基本的坐标反算公式,适用于球面坐标系。
在实际应用中,有时需要进行更复杂的计算,考虑到地球的非球形特征,可以使用其他更精确的坐标反算公式。
此外,还可以考虑其他因素,如地图投影、大地基准等。
需要根据具体需求选择适用的公式和方法。
总结:坐标反算是一项重要的计算方式,可用于测量、地理和导航等领域。
正算是已知起点坐标、方位角和距离,计算目标点坐标;反算是已知起点坐标和目标点坐标,计算方位角和距离。
在计算过程中,需要使用到三角函数、开平方等数学运算。
第六章→第三节→导线测量内业计算导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。
首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。
一、坐标正算与坐标反算1、坐标正算已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。
如图6-6 所示,点的坐标可由下式计算:式中、为两导线点坐标之差,称为坐标增量,即:【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标?35o17'36.5"=1163.58035o17'36.5"=1115.7932、坐标反算已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。
如图6-6可知,由下式计算水平距离与坐标方位角。
(6-3)(6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。
【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。
=62°09'29.4"+180°=242°09'29.4"注意:一条直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离。
坐标正反算公式范文一、坐标正算(后方交汇计算):已知起点坐标及观测角度和距离的情况下,求目标点的坐标。
1.观测角度求目标点坐标:在测量中,常常通过角度观测来确定目标点的坐标。
如果已知起点坐标和观测角度,可以通过以下公式求解目标点的坐标:X = X0 + L * sin(α + θ)Y = Y0 + L * cos(α + θ)其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
2.观测距离求目标点坐标:在一些情况下,可以通过观测距离来确定目标点的坐标。
已知起点坐标和观测距离的情况下,可以通过以下公式求解目标点的坐标:X = X0 + L * sinαY = Y0 + L * cosα其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角。
3.观测角度和距离求目标点坐标:在一些情况下,需要同时使用观测角度和观测距离来确定目标点的坐标。
已知起点坐标、观测角度和观测距离的情况下,可以通过以下公式求解目标点的坐标:X = X0 + (L * sinθ)/ sinαY = Y0 + (L * cosθ)/ cosα其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
二、坐标反算(前方交汇计算):已知起点坐标和目标点坐标或两点坐标之间的距离和角度的情况下,求观测角度和距离。
1.目标点坐标求观测角度和距离:当已知起点坐标和目标点坐标时,可以通过以下公式求解观测角度和距离:L=√((X-X0)^2+(Y-Y0)^2)tanα = (X - X0) / (Y - Y0)θ = atan((X - X0) / (Y - Y0)) - α其中,X0和Y0是起点的坐标,X和Y是目标点的坐标,L为目标点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
2.两点坐标之间的距离和角度求观测角度和距离:当已知起点坐标、目标点坐标和两点之间的距离时,可以通过以下公式求解观测角度和距离:L=√(a^2+b^2)sinθ = a / Lcosθ = b / Ltanα = a / b其中,a和b分别为起点和目标点之间的ΔX和ΔY坐标差,L为目标点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
测绘技术中的坐标系转换方法及精度评估引言:测绘技术是一门关于地球形状测量、地球表面及其上各种对象的测量、计算、制图、刻度、记录、存储与再现的学科。
坐标系转换是测绘技术中的一个重要环节,它将不同坐标系下的数据进行转换以满足不同需求。
本文将介绍测绘技术中常用的坐标系转换方法,并探讨如何评估其精度。
一、坐标系转换方法1.1 大地水准面转换大地水准面转换是将地球椭球体上的高程数据转换为平面坐标数据的方法。
常用的转换方法有正算和反算两种。
正算是通过已知的椭球体参数、基准点的经纬度和高程,计算出对应的平面坐标。
反算则相反,通过已知的平面坐标计算出对应的经纬度和高程。
1.2 平面坐标转换平面坐标转换通常指的是将地球表面上的经纬度坐标转换为平面坐标。
这种转换方法常用于地图制图和地理信息系统等领域。
常见的转换方法有高斯投影法、墨卡托投影法等。
1.3 高程数据转换高程数据转换是将不同高程数据间进行转换的方法。
常见的高程数据包括正常高、大地高、椭球高等。
转换方法主要有高程差法、高程变换法等。
二、精度评估精度评估是对坐标系转换结果进行准确性和可靠性的评估。
常见的评估方法有以下几种。
2.1 残差分析法残差分析法是通过对已知控制点进行观测,得到转换后的坐标与实际坐标之间的差异,从而评估坐标系转换的精度。
该方法适用于小范围的转换评估。
2.2 精度评定法精度评定法是通过对已知控制点进行观测,计算出转换前后坐标之间的差异,从而评估转换的精度。
这种方法需要较多的控制点,并且对控制点的选择有一定要求。
2.3 网形控制法网形控制法是通过建立一定数量的控制网,测量控制网上的点在转换前后的坐标差异,并根据这些差异来评估转换的精度。
这种方法适用于大范围的转换评估。
2.4 统计分析法统计分析法是通过对转换前后坐标差异的统计分析来评估转换的精度。
常用的统计分析方法包括平均误差分析、方差分析等。
结论:在测绘技术中,坐标系转换是一个重要的环节,它可以将不同坐标系下的数据进行转换以满足不同需求。
测绘技术中的正反算法原理测绘技术是一门重要的学科,广泛应用于地理信息系统、地图制作、土地管理等领域。
其中,正反算法是测绘技术中的核心内容之一。
正反算法是指根据已知的地理空间坐标和属性数据,计算未知地理空间坐标和属性数据的过程。
本文将从理论原理、技术应用和发展趋势三个方面介绍测绘技术中的正反算法原理。
一、理论原理正反算法的理论基础可以追溯到空间三角测量理论和地理参考系统理论。
空间三角测量理论主要是研究地球表面点的测量方法和数学模型,而地理参考系统理论则研究地球表面的坐标系统和坐标变换方法。
正反算法是在这两个理论基础上发展起来的,目的是通过已知的地理空间坐标和属性数据,计算未知地理空间坐标和属性数据。
正算法是从已知的地理空间坐标和属性数据出发,计算未知地理空间坐标和属性数据的过程。
常见的正算法包括坐标变换、坐标转换、属性推算等。
坐标变换是指将不同地理参考系统下的坐标进行转换,以保证坐标数据的一致性。
坐标转换是指将已知点的地理空间坐标通过测量和计算,推算出其他未知点的坐标。
属性推算是指根据已知点的属性数据和地理空间关系,预测其他未知点的属性数据。
正算法的基本原理是数学模型和测量方法的结合,通过测量和计算来完成地理空间数据的预测和推测。
反算法是从已知的地理空间坐标和属性数据出发,逆推已知点的测量和计算方法,以达到精确和正确的结果。
反算法是通过已知点的测量和计算结果来检验和验证理论模型和测量方法的准确性和可靠性。
反算法的基本原理是通过误差和残差的分析,对测量和计算结果进行反推和反算,以提高地理空间数据的精度和可信度。
二、技术应用正反算法在测绘技术中有广泛的应用。
首先,正反算法在地图制作中起到重要作用。
通过正算法可以根据已有的地理空间数据,生成新的地理空间数据,从而更新和完善地图信息。
通过反算法可以对地图数据进行精度验证和纠正,提高地图的准确性和可靠性。
其次,正反算法在地理信息系统中也有重要的应用。
地理信息系统是利用计算机技术和数据处理方法,对地理空间数据进行存储、管理、分析和应用的系统。
5.3坐标反算坐标反算,就是根据直线两个端点的已知坐标,计算直线的边长和坐标方位角的工作。
如图5.3所示,若A、B为两已知点,其坐标分别为(XA,YA)和(XB,YB),根据三角函数,可以得出直线的边长和坐标方位角计算公式:tgα=△YAB/△XAB=(YB-YA)/(XB-XA)αAB =tg-1 (△YAB/△XAB)= tg-1 ((YB-YA)/(XB-XA))/td>DAB=△YAB/sin αAB=XAB/cos αAB 或 (5.6)DAB=√(△X2+△Y2)应当注意,按公式(5.5)用计算器计算时显示的反正切函数值在-90°~+90°之间,而坐标方位角范围是0°~360°,所以按(5.5)式反算方位角时,要根据ΔX、ΔY的正负符号确定直线AB 所在的象限,从而得出正确的坐标方位角。
如使用fx140等类型的计算器,可使用功能转换键 INV 和极坐标与直角坐标换算键P→R以及x←→y键直接计算求得方位角。
按键顺序为:ΔX INV R→P ΔY =显示D X←→y 显示α。
例5.2 已知B点坐标为(1536.86 ,837.54),A点坐标为(1429.55,772.73),求距离DBA和坐标方位角αBA。
解:先计算出坐标增量:ΔXBA=1429.55-1536.86=-107.31ΔYBA=772.73-837.54=-64.81直接用计算器计算:按-107.31 INV P→R -64.81 =显示125.36(距离DBA);按 x←→y 显示211°07′53″(坐标方位角αBA)。
5.2 坐标正算坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图5.3所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B 的坐标为:XB=XA+ΔXAB (5.1)YB=YA+ΔYAB (5.2)式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
由图5.3中,根据三角函数,可写出坐标增量的计算公式为:图5.3ΔXAB=DAB·cosαAB (5.3)ΔYAB=DAB·sinαAB (5.4)式中ΔX、ΔY的符号取决于方位角α所在的象限。
例5.1 已知直线B1的边长为125.36m,坐标方位角为211°07′53″,其中一个端点B的坐标为(1536.86 ,837.54),求直线另一个端点1的坐标X1,Y1。
解: 先代入公式(5.3)、(5.4),求出直线B1的坐标增量:ΔXB1=DB1·CosαB1=125.36×cos211°07′53″=-107.31mΔYB1=DB1·sinαB1=125.36×sin211°07′53″″=-64.81m然后代入公式(5.1)、(5.2),求出直线另一端点1的坐标:X1=XB+ΔXB1=1536.86-107.31=1429.55mY1=YB+ΔYB1=837.54-64.81=772.73m坐标增量计算也常使用小型计算器计算,而且非常简单。
如使用fx140等类型的计算器,可使用功能转换键INV和极坐标与直角坐标换算键P→R以及x←→y键。
按键顺序为:D INV P→R α =显示ΔX X←→y 显示ΔY。
如上例,按125.36 INV P→R 211°07′53″=显示-107.31(ΔXB1);按 x←→y 显示-64.81(ΔYB1)5.4建筑坐标与测量坐标的换算为了工作上的方便,在建筑工程设计总平面图上,通常采用施工坐标系(即假定坐标系)来求算建筑方格网的坐标,以便使所有建(构)筑物的设计坐标均为正值,且坐标纵轴和横轴与主要建筑物或主要管线的轴线平行或垂直。
为了在建筑场地测设出建筑方格网点的位置及所有设计的建(构)筑物,在测设之前,还必须将建筑方格网点和设计建(构)筑物的施工坐标系坐标换算成测量坐标系坐标。
如图5.4所示,坐标换算的要素xo、yo 、α 一般由设计单位给出。
xp、yp 设为P点在测量坐标系xoy中的坐标,x'p、y'p为P点在施工坐标系x'o'y'中的坐标,则将施工坐标换算成测量坐标的计算公式为:图5.4xp=xo+x'pcos α-y'psin αyp=yo+y'psin α-y'pcos α (5.7)反之,将测量坐标换算成施工坐标的计算公式如下:x'p=(xp-xo)cos α+(yp-yo)sin αy'p=-(xp-xo)sin α+(yp-yo)cos α (5.8)5.1控制测量概述为了限制测量误差的累积,确保区域测量成果的精度分布均匀,并加快测量工作进度,测量工作应按照“从整体到局部,先控制后碎部”这样的程序开展。
即在一个大范围内从事测量工作,首先应从整体出发,在区域内选择少数有控制意义的点,组成整体控制网,用高精度的仪器、精密的测量方法,求出各控制点的位置,这项工作称为控制测量。
控制点的位置确定以后,再以各控制点为基准,确定其周围各碎部点的位置,这项工作称为碎部测量。
控制网分为平面控制网和高程控制网。
测定控制点平面位置的工作,称为平面控制测量。
测定控制点高程的工作,称为高程控制测量。
根据其范围大小和功能不同,测量控制网分为国家控制网、城市控制网和小地区控制网。
国家控制网是在全国范围内建立的控制网,它为统一全国范围内的坐标系统和高程系统,并为各种工程测量提供控制依据。
国家控制网按精度由高到低分为一、二、三、四共四个等级。
它的低级点受高级点控制。
一等精度最高,是国家控制网的骨干,二等精度次之,它是国家控制网的全面基础。
三、四等是在二等控制网下的进一步加密。
国家平面控制网如图5.1所示,主要布设成三角网。
即将相邻的控制点组成互相连接的三角形。
这些组成三角形的控制点称为三角点。
通过在三角点上设置测量标志,精密测量起始边的方位角,精密丈量三角网中一条或几条边的边长,并测出所有三角形的水平角,经过计算,求出各三角形的边长,最后根据其中一点的已知坐标和一边的已知方位角,进而推算出各三角点的坐标。
国家高程控制网如图5.2所示,主要采用水准测量的方法来建立。
各等水准测量经过的路线称为水准路线。
国家高程控制网除布设成水准网,还包括闭合环线和附合水准路线。
城市控制网是为城市规划、建筑设计及施工放样等目的而建立的测量控制网。
图5.1根据城市的大小,它可以在国家基本控制网的基础上进行加密。
若国家控制网不能满足其要求,也可以建立单独的控制网,具体做法见《城市测量规范》相关部分内容。
小地区控制网主要指面积在15平方公里以内的小范围,为大比例尺测图和工程建设而建立的控制网。
小地区控制网应尽可能与国家控制网中的高级控制点进行连测,将国家控制点的坐标和高程作为小地区控制网的起算和校核数据。
若与国家控制网进行连测有困难,也可以在测区内建立独立的控制网。
小地区平面控制网可以采用三角测量的方法建立,也可以采用导线测量的方法建立。
所谓导线,就是将相邻控制点用直线连接而构成的折线图形。
构成导线的控制点称为导线点。
相邻导线点的边长称为导线边。
相邻导线边之间的水平角称为转折角。
导线测量就是通过测定导线边的边长和各转折角,根据已知数据,推算出各导线边的坐标方位角,从而求出各导线点的坐标。
小地区平面控制网应根据测区面积的大小按精度要求分级建立。
在测区范围内建立统一的精度最高的控制网,称为首级控制网。
直接为测图建立的控制网,称为图根控图5.2制网。
图根控制网中的控制点称为图根控制点,简称图根点。
小地区高程控制网可以采用水准测量的方法建立,也可以采用三角高程测量的方法建立。
水准测量适用于地势平坦的城市建筑区,三角高程测量主要使用于地面高差起伏较大的山区和丘陵地区。
各种等级的高程控制点和和平面控制点都埋设有固定的标石,它们的点名、坐标、高程可向各有关城建或测绘部门查得。
阅读:小地区控制点加密的基本方法在工程建设中,常常遇到在小范围内加密控制点的问题。
小范围内加密平面控制点常采用导线和测角交会定点的形式,加密高程控制点多采用水准测量和三角高程测量的方法。
直接为测绘地形图提供的控制点,称为图根控制点。
测定图根控制点位置的工作,称为图根控制测量。
一、平面控制测量(一)导线的外业测量工作山区、丘陵地区的图根控制网多采用三角锁或测角交会点的形式,而对于城市建筑区多采用导线的形式。
1、导线的概念将测区内相邻控制点先连成直线,再连成的折线图形,被称为导线。
导线上的各控制点称为导线点。
相邻控制点之间的边称为导线边。
相邻导线边之间的水平角称为转折角。
导线测量就是通过测定导线的边长和转折角,根据已知数据计算出各导线点的坐标。
2、导线的布设形式为了检核导线的外业测量成果,导线通常布设成闭合、附合和支线三种形式。
如图5.5(a)所示,导线从已知控制点A和已知方向BA出发,经过1、2、3、4点,最后仍回到起点A,形成一闭合多边形,这样的导线称为闭合导线。
如图5.5(b)所示,导线从已知控制点A和已知方向BA出发,经过1、图5.52、3点,最后附合到另一已知控制点C和已知方向CD,这样的导线称为附合导线。
如图5.5(c)所示,若导线由一已知点A出发,观测至点1,既不附合到另一已知点,又不回到原起始点,这样的导线称为支导线。
3、导线测量的等级与技术要求由《工程测量规范》可知,导线测量按精度划分为一个个等级,各等级有自己的技术要求,如表5.1所示。
表5.1 导线测量的技术要求等级导线长度(km)平均边长(km)测角中误差(″)测回数DJ2 DJ6方位角闭合差(″)相对闭合差一级 4 0.5 5 2 4 ±10√n ≤1/15000二级 2.4 0.25 8 1 3 ±16√n ≤1/10000三级 1.2 0.1 12 1 2 ±24√n. ≤1/5000图根≤0.001M ≤1.5测图最大视距 30(一般)20(首级)— 1 ±60√n.(一般)±40√n (首级) ≤1/2000注:M为测图比例尺的分母,n为测站数。
4、导线选点与埋石在确定导线的布设形式和点位之前,应收集测区已有的地形图和高一级控制点的成果资料,然后到现场踏勘,了解测区现状和已知控制点。
根据已知控制点的分布、测区地形条件和测图要求等具体情况,在测区原有地形图上拟定导线的布设方案,最后到实地去核对、落实点位和埋设标志。
选点时,应注意使相邻控制点之间通视良好,地势平坦,便于测角和量边;视野开阔,便于施测碎部;土质坚实,便于安放仪器和保存标志;各边长度大致相等,点位分布均匀,且密度足够。