1.1单回路系统的结构组成
- 格式:ppt
- 大小:427.50 KB
- 文档页数:24
单回路控制系统的结构及基本原理单回路控制系统,听起来是不是有点高深?别担心,咱们慢慢来,把它说得简单明了。
想象一下,你家里的空调,夏天一开,立马变成了清凉的避风港。
这个过程背后,就是单回路控制系统在默默发挥作用。
它就像是一位调皮的管家,专门负责调节室内温度。
你觉得怎么样?挺酷吧?单回路控制系统到底是什么呢?其实就是一个简单的控制机制。
就像你在厨房里做饭,火候掌握得当,菜才能好吃。
系统通过传感器感知环境,像是人的“感觉器官”,然后根据设定的目标进行调整。
如果室温太高,控制系统就会给空调发信号,让它开起来。
这样一来,家里瞬间凉快。
是不是感觉有点像魔法?咱们再深入一下,单回路控制系统的基本原理其实就是反馈控制。
反馈控制就像是你骑自行车时的平衡,往左偏了就稍微向右打方向,保持稳定。
系统通过不断获取反馈数据,进行调整,保证温度不会过高或者过低。
要是没有这个反馈,空调就会像个无头苍蝇,根本不知道该怎么调节。
想象一下,如果空调开得太冷,你可能就得裹着毛毯看电视了,真是太折磨人了。
再说说控制环路,单回路控制系统的“主角”。
控制环路里有三个重要角色:传感器、控制器和执行器。
传感器就像你家里的眼睛,负责监测环境。
控制器是大脑,分析数据并做出决策。
执行器则是肌肉,负责实际操作。
三者协同合作,像是一场默契的舞蹈,缺一不可。
要是哪个环节出了问题,整个系统就会陷入混乱,真是让人无奈。
举个例子,想象一下你在夏天的炎热中,开着空调,舒舒服服地看着电视。
突然空调出问题,室内温度一下子飙升。
那种感觉就像是被烈日暴晒,简直要人命。
这个时候,如果控制系统能够及时反馈,让空调赶紧调整,那就完美了。
可一旦反馈失灵,你就得忍受那种汗流浃背的折磨,真是心烦意乱。
说到这里,咱们还得提一下这个系统的稳定性。
单回路控制系统就像是一道题,解出来才能得到最终答案。
假如反馈不准确,系统就可能过度反应,导致温度忽冷忽热,就像过山车一样刺激。
这样的结果可不是你想要的,毕竟生活需要一些“稳定感”,对吧?有了稳定的控制系统,大家才能安心享受生活。
仪表控制说明及PID整定方法化工乙烯仪表-李恒超主要内容一、仪表控制说明1、单回路控制说明2、复杂控制说明二、PID整定方法1、PID整定方法2、PID整定举例三、自动控制回路参数波动原因分析1、工艺操作系统引起参数波动分析2、仪表和调节阀的特性引起参数波动分析3、机泵控制的波动原因分析主要内容一、仪表控制说明1、单回路控制说明1.1 单回路的结构与组成1.2 明确自动控制的目的1.3 被控变量的选择1.4 控制变量的选择1.5 控制质量1.6 滞后1.7 举例与仿真1.8PID的正反作用2、复杂控制说明2.1 前馈控制2.2 串级控制2.3 均匀控制2.4 分程控制2.5 比值控制2.6 选择控制2.7 三冲量控制2.8 耦合控制二、PID整定方法1、PID整定说明1.1 PID回路阶跃响应性能指标1.2PID设置面板1.3 PID参数功能1.3.1 增益K作用对调节过程的影响1.3.2 积分作用对调节过程的影响1.3.3 微分调节D说明1.4 PID参数的整定1.4.1 测试阶跃响应法1.4.2 PID参数的整定步骤说明1.4.3 PID参数整定经验说明1.4.4 PID参数整定方法二2、PID整定举例2.1 PID参数的形象说明2.2 PID参数仿真曲线举例说明2.3 PID整定参数举例分析说明2.4 PID参数整定总结三、自动控制回路参数波动原因分析1、工艺操作系统引起参数波动分析1.1 精馏塔的典型控制1.2 反应器的控制2、仪表和调节阀的特性引起参数波动分析2.1 流量计的量程比、流速,对测量的影响2.2 调节阀的流量特性和可调比2.3 提高调节阀使用寿命的常见方法3、机泵控制的波动原因分析3.1 对离心泵的控制3.2 对计量泵的控制3.3 对变频泵的控制一、仪表控制说明\1.单回路控制说明1.1 单回路的结构与组成由一个被控对象、一个测量变送器、一个控制器和一个执行机构(控制阀)所组成的闭环控制系统。
第一篇过程控制系统第一章单回路反馈控制系统简称:单回路控制系统、简单控制系统在所有反馈控制系统中,单回路反馈控制系统是最基本、结构最简单的一种。
在生产过程控制中应用得最为广泛的、并能解决大量控制问题的系统(70%)。
研究单回路系统的分析和设计方法,是研究复杂控制系统的基础。
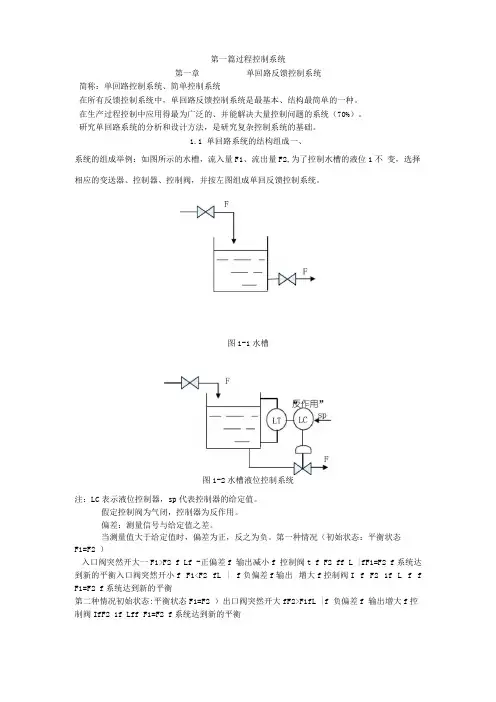
1.1 单回路系统的结构组成一、系统的组成举例:如图所示的水槽,流入量F1、流出量F2,为了控制水槽的液位1不变,选择相应的变送器、控制器、控制阀,并按左图组成单回反馈控制系统。
图1-1水槽图1-2水槽液位控制系统注:LC表示液位控制器,sp代表控制器的给定值。
假定控制阀为气闭,控制器为反作用。
偏差:测量信号与给定值之差。
当测量值大于给定值时,偏差为正,反之为负。
第一种情况(初始状态:平衡状态F1=F2 )入口阀突然开大一F1>F2 f Lf -正偏差f 输出减小f 控制阀t f F2 ff L |fF1=F2 f系统达到新的平衡入口阀突然开小f F1<F2 fL | f负偏差f输出增大f控制阀I f F2 1f L f f F1=F2 f系统达到新的平衡第二种情况初始状态:平衡状态F1=F2 )出口阀突然开大fF2>F1fL |f 负偏差f 输出增大f控制阀IfF2 1f Lff F1=F2 f系统达到新的平衡出口阀突然关小f F1>F2 f L f -正偏差f 输出减小f 控制阀t f F2 f f L | f F1=F2 f 系统达到新的平衡几点说明:(1)图中的各个信号值都是增量初始状态为零;图中箭头表示的是信号流向,而 不是物料或能量的流向。
(2)各环节的增益有正、负之别:控制器:正作用时增益为负”反作用时增益为正” 控制阀:气开阀增益为正” 气闭阀增益为负”变送器:一般为正”控制对象:根据操纵变量Q(S)的变化引起被控变量丫 (S)的变化来确定Q(S) ffY(S) f 增益为正”反之为负,上例中当控制阀装在出口处时,对象增益为 负”; 当控制阀装在人口处时,对象增益为正整个系统必须是一个负反馈系统,因此自R(S) 至X(S)的各个环节增益的乘积必须是正值。

过程控制技术第一次作业系别:自动控制系专业:电气自动化班级:自145学号:141415250姓名:谢雪龙日期:2016年03月23日单回路控制系统总结一、单回路控制系统的组成单回路控制系统就是由一个测量变送器、一个控制器、一个控制阀和一个被控对象组成的单闭环控制系统。
简单控制系统方框图特点:结构简单、操作维护方便、最普遍。
二、被控变量的选择1、分类:直接控制:最基本的热工参数,一般都可以直接进行测量和控制的参数。
如:温度、压力、液位、流量。
间接控制:在一般条件下,无法直接测量和控制。
2、被控变量的选择原则:①要有代表性②滞后要小③灵敏度要高④要独立可控成本要低三、操作变量的选择1、对象静态特性的影响放大系数K0越大,表示控制作用对被控变量影响越大,控制作用越有效。
K0越大会导致控制通道过于灵敏,使控制系统不稳定。
干扰通道Kf越小越好。
2、控制通道时间常数的影响控制通道的时间常数T0小一些,是之反应灵敏,控制及时。
3、操纵变量的选择原则①操纵变量是可控的,即工艺上允许调节的变量。
②操纵变量一般应比其他干扰对被控变量的影响更加灵敏。
应考虑合理性与生产的经济性。
四、控制阀的选择1、控制阀的流量特性:⑴ 直线流量特性特点:小开度大调解;大开度小调节。
⑵ 对数流量特性特点:大开度大调解;小开度小调节。
⑶ 快开流量特性⑷ 抛物线流量特性2、控制阀气开、气关形式的选择① 从生产安全出发② 保证产品生产质量③ 从降低原料、产品、动力消耗来考虑④ 从介质的特点考虑五、控制器控制规律的确定1、比例控制器(P )传递函数:K S G =)(特点:输出不失真、不延迟、成比例、有余差。
2、积分控制器(I ) 传递函数:TSS G 1)(= 特点:响应滞后;过度过程变长;但可以消除余差。
3、微分控制器(D )传递函数:TS S G =)(特点:加速系统的响应,减小系统的过度时间。
4比例积分控制器(PI ) 传递函数:)11()(TSK S G += 特点:① Kp 系数实现阶跃性增加,Ti 积分是缓慢变化。
图1.1 单回路控制系统方框图图1.2 双容液位定值控制系统(a)结构图 (b)方框图图1.3 三容液位定值控制系统(a)结构图 (b)方框图图1.4 锅炉夹套水温定值控制系统(a)结构图 (b)方框图图1.5 单闭环流量定值控制系统图1.6 锅炉内胆温度位式控制系统(a)结构图 (b)方框图图2.1 串级控制系统方框图R-主参数的给定值; C1-被控的主参数; C2-副参数;f1(t)-作用在主对象上的扰动; f2(t)-作用在副对象上的扰动。
图2.2 水箱液位串级控制系统(a)结构图 (b)方框图图2.3 三闭环液位控制系统(a)结构图 (b)方框图图2.4 锅炉夹套与内胆温度串级控制系统(a)结构图 (b)方框图图2.5 锅炉内胆水温与循环水流量串级控制系统(a)结构图 (b)方框图图2.6 盘管出口水温与锅炉内胆水温串级控制系统(a)结构图 (b)方框图图2.7 盘管出口水温与热水流量串级控制系统(a)结构图 (b)方框图图2.8 下水箱液位与进水流量串级控制系统(a)结构图 (b)方框图(a)(b)图3.1 (1)管式加热炉温度流量串级控制系统(燃油流量Q为副参数)(a)方框图 (b) 结构图D1:原料油流量,初始温度表,D2:燃油压力(流量),D3:喷油蒸汽压力,配风,炉膛漏风,环境温度.燃油成分等(2)管式加热炉温度压力串级控制系统(燃料压力为副参数)(3)管式加热炉温度串级控制系统(炉膛温度T1为副参数)图3.2 加热炉三变量控制系统图3.3 脱硫加热器流量比值控制系统图3.4 换热器温度串级控制系统(a)出口温度-加热蒸汽流量串级控制(b) 出口温度-加热蒸汽压力串级控制图3.5 换热器温度前馈-比值控制系统图3.6 反应器温度串级控制系统。