模拟量处理和PID控制
- 格式:ppt
- 大小:224.50 KB
- 文档页数:17
模拟量闭环控制一般用PID。
需要较好的动态品质和较高的稳态精度时,可以选用PI控制方式;控制对象的惯性滞后较大时,应选择PID控制方式。
各部分的作用如下:
在P,I,D这三种控制作用中,比例部分与误差信号在时间上是一致的,只要误差一出现,比例部分就能及时地产生与误差成正比的调节作用,具有调节及时的特点。
比例系数KC越大,比例调节作用越强,系统的稳态精度越高;但是对于大多数系统,KC过大会使系统的输出量振荡加剧,稳定性降低。
控制器中的积分作用与当前误差的大小和误差的历史情况都有关系,只要误差不为零,控制器的输出就会因积分作用而不断变化,一直要到误差消失,系统处于稳定状态时,积分部分才不再变化,因此积分部分可以消除稳态误差,提高控制精度。
但是积分作用的动作缓慢,可能给系统的动态稳定性带来不良影响,因此很少单独使用。
积分时间常数TI增大时,积分作用减弱,系统的动态性能(稳定性)可能有所改善,但是消除稳态误差的速度减慢。
根据误差变化的速度(即误差的微分),微分部分提前给出较大的调节作用。
微分部分反映了系统变化的趋势,它较比例调节更为及时,所以微分部分具有超前和预测的特点。
微分时间常数增大时,超调量减小,动态性能得到改善,但是抑制高频干扰的能力下降。
PLC对模拟量信号是怎么进行处理的模拟量信号是自动化过程控制系统中最基本的过程信号(压力、温度、流量等)输入形式。
系统中的过程信号通过变送器,将这些检测信号转换为统一的电压、电流信号,并将这些信号实时的传送至控制器(PLC)。
PLC通过计算转换,将这些模拟量信号转换为内部的数值信号。
从而实现系统的监控及控制。
从现场的物理信号到PLC内部处理的数值信号,有以下几个步骤:从以上PLC模拟量的信号输入流程可以看到,在自动化过程控制系统中,模拟量信号的输入是非常复杂的。
但是,在现目前的工业现场,对模拟量信号的处理已基本都采用电流信号方式进行传输,相比于电压信号方式,电流信号抗干扰能力更强,传输距离更远,信号稳定。
这里就PLC对模拟量信号的转换过程进行一个简单的分解介绍。
1PLC对模拟量信号的转换西门子S7-200SMART PLC模拟量模块对模拟量信号的转换范围台达DVP系列模拟量模块对模拟量信号的转换范围从以上可以看到:1、模拟量信号接入PLC后,PLC将模拟量信号转换为了整型数据,不是浮点数(如西门子-27,648 到 27,648);2、不同品牌的PLC对模拟量转换范围是有差异的(如西门子-27,648 到 27,648;台达-32,384 到 32,384);3、PLC同一个模块对不同类型的模拟量信号的转换范围是一致的(如西门子对±10 V、±5 V、±2.5 V 或 0 到 20mA的模拟量信号的转换范围均为-27,648 到 27,648);故从以上几点我们可以知道,接入PLC的模拟量信号还需要进行再转换处理,才可以得到与实际物理量相匹配的数据;在进行数据转换处理的时候,还应该与使用的PLC模块的处理数据范围相对应。
2PLC数据转换处理过程1、模拟量信号与PLC转换数据之间的转换从以上内容知道,从PLC直接读取到的模拟量信号为整型数据,整型数据无法直观的反馈出实际的物理量大小,故为了能够直观的反馈出现场的过程信号情况,还应该将这些整型数据转换为反馈直观真实的浮点数信号。
如何使用S7-200CPU 的PID 控制第一部分、PID 控制S7-200 能够进行PID 控制。
S7-200 CPU 最多可以支持8 个PID 控制回路(8 个PID 指令功能块)。
PID 是闭环控制系统的比例-积分-微分控制算法。
PID 控制器根据设定值(给定)与被控对象的实际值(反馈)的差值,按照PID 算法计算出控制器的输出量,控制执行机构去影响被控对象的变化。
PID 控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
根据具体项目的控制要求,在实际应用中有可能用到其中的一部分,比如常用的是PI(比例-积分)控制,这时没有微分控制部分。
PID 算法在S7-200 中的实现PID 控制最初在模拟量控制系统中实现,随着离散控制理论的发展,PID 也在计算机化控制系统中实现。
为便于实现,S7-200 中的PID 控制采用了迭代算法。
详细的计算方法请参考《S7-200系统手册》中PID 指令部分的相关内容。
计算机化的PID 控制算法有几个关键的参数Kc(Gain,增益),Ti(积分时间常数),Td(微分时间常数),Ts(采样时间)。
在S7-200 中PID 功能是通过PID 指令功能块实现。
通过定时(按照采样时间)执行PID 功能块,按照PID 运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制量。
PID 功能块通过一个PID 回路表交换数据,这个表是在V 数据存储区中的开辟,长度为36 字节。
因此每个PID 功能块在调用时需要指定两个要素:PID 控制回路号,以及控制回路表的起始地址(以VB 表示)。
由于PID 可以控制温度、压力等等许多对象,它们各自都是由工程量表示,因此有一种通用的数据表示方法才能被PID 功能块识别。
S7-200 中的PID 功能使用占调节范围的百分比的方法抽象地表示被控对象的数值大小。
在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。
模拟量PID参数调节模拟量PID参数调节PID就是比例微积分调节,具体你可以参照自动控制课程里有详细介绍!正作用与反作用在温控里就是当正作用时是加热,反作用是制冷控制。
PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID 控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligentregulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PI D控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现P ID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet 相连,如Rockwell的PLC-5等。
还有可以实现PID控制功能的控制器,如Rockwell 的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop controlsystem)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
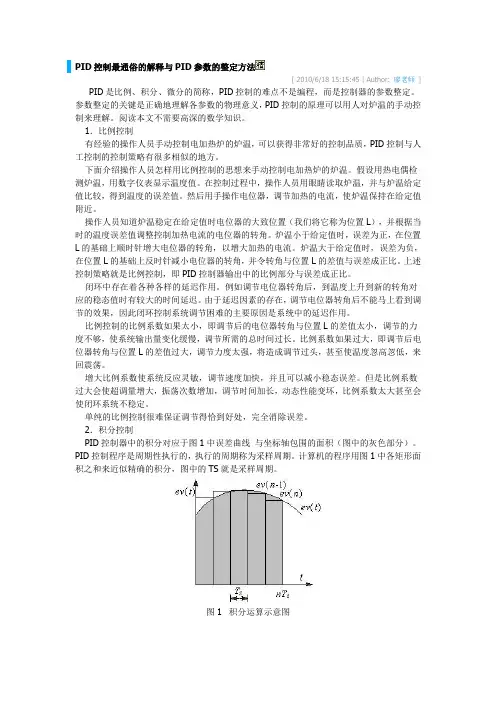
PID控制最通俗的解释与PID参数的整定方法[ 2010/6/18 15:15:45 | Author: 廖老师] PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。
参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。
阅读本文不需要高深的数学知识。
1.比例控制有经验的操作人员手动控制电加热炉的炉温,可以获得非常好的控制品质,PID控制与人工控制的控制策略有很多相似的地方。
下面介绍操作人员怎样用比例控制的思想来手动控制电加热炉的炉温。
假设用热电偶检测炉温,用数字仪表显示温度值。
在控制过程中,操作人员用眼睛读取炉温,并与炉温给定值比较,得到温度的误差值。
然后用手操作电位器,调节加热的电流,使炉温保持在给定值附近。
操作人员知道炉温稳定在给定值时电位器的大致位置(我们将它称为位置L),并根据当时的温度误差值调整控制加热电流的电位器的转角。
炉温小于给定值时,误差为正,在位置L的基础上顺时针增大电位器的转角,以增大加热的电流。
炉温大于给定值时,误差为负,在位置L的基础上反时针减小电位器的转角,并令转角与位置L的差值与误差成正比。
上述控制策略就是比例控制,即PID控制器输出中的比例部分与误差成正比。
闭环中存在着各种各样的延迟作用。
例如调节电位器转角后,到温度上升到新的转角对应的稳态值时有较大的时间延迟。
由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
比例控制的比例系数如果太小,即调节后的电位器转角与位置L的差值太小,调节的力度不够,使系统输出量变化缓慢,调节所需的总时间过长。
比例系数如果过大,即调节后电位器转角与位置L的差值过大,调节力度太强,将造成调节过头,甚至使温度忽高忽低,来回震荡。
增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。
但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。

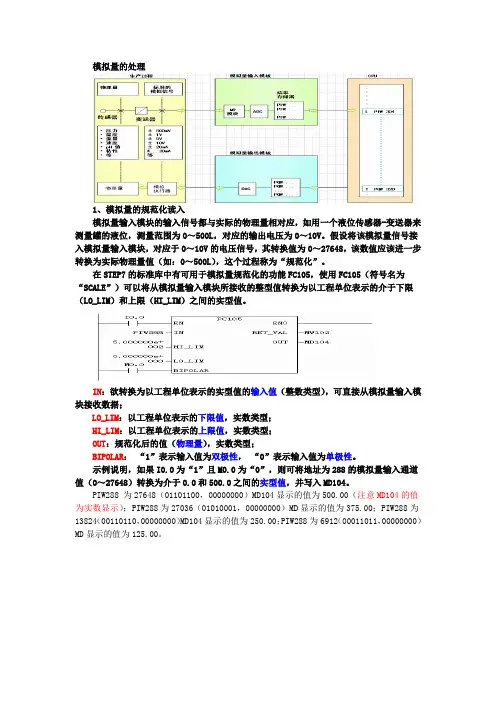
模拟量的处理1、模拟量的规范化读入模拟量输入模块的输入信号都与实际的物理量相对应,如用一个液位传感器-变送器来测量罐的液位,测量范围为0~500L,对应的输出电压为0~10V。
假设将该模拟量信号接入模拟量输入模块,对应于0~10V的电压信号,其转换值为0~27648,该数值应该进一步转换为实际物理量值(如:0~500L),这个过程称为“规范化”。
在STEP7的标准库中有可用于模拟量规范化的功能FC105,使用FC105(符号名为“SCALE”)可以将从模拟量输入模块所接收的整型值转换为以工程单位表示的介于下限(LO_LIM)和上限(HI_LIM)之间的实型值。
IN:欲转换为以工程单位表示的实型值的输入值(整数类型),可直接从模拟量输入模块接收数据;LO_LIM:以工程单位表示的下限值,实数类型;HI_LIM:以工程单位表示的上限值,实数类型;OUT:规范化后的值(物理量),实数类型;BIPOLAR:“1”表示输入值为双极性,“0”表示输入值为单极性。
示例说明,如果I0.0为“1”且M0.0为“0”,则可将地址为288的模拟量输入通道值(0~27648)转换为介于0.0和500.0之间的实型值,并写入MD104。
PIW288 为27648(01101100,00000000)MD104显示的值为500.00(注意MD104的值为实数显示);PIW288为27036(01010001,00000000)MD显示的值为375.00;PIW288为13824(00110110,00000000)MD104显示的值为250.00;PIW288为6912(00011011,00000000)MD显示的值为125.00。
FC105的功能可用下式表示:常数K1和K2根据输入值是双极性还是单极性来设置。
假定输入整型值介于-27648与27648之间,则K1=-27648.0,K2=+27648.0;假定输入整型值介于0和27648之间,则K1=0.0,K2=+27648.0。
S7-300的PID调节一.PID的应用场合PID调节(P比例,I积分,D微分):常用于需要用温度,液位,压力等闭环控制动作的场所。
常用的PID调节有三种:A.用温控等仪表进行调节,但是一般常规仪表只有一路PID控制通道,如果要实现多路PID控制,就需要很多仪表,成本过高,且不便于集中处理。
B.用PLC中的FB41/FB58块(模拟量输出控制,FB41/FB58 就相当于我们常规仪表里的控制器,FB58是专用于温度控制的块,但是占CPU 资源过大),需要用到的硬件为:1. PLC:CPU及模拟量输入输出模块;2. 传感器:接收压力,温度等信号;3. 变送器:将温度,压力等信号转换成电流或电压信号,依所用的模块可以取舍,例如如果PLC模拟量输入模块带有RTD模块(直接接热电阻信号)的功能,温度变送器可以不用;4. 功率调节器(调压模块){必备}:接入模拟量输出模块,用模拟量输出的调节,调节电压大小,进行恒定的输出,控制被执行元件(例如加热器);5.加热/加压器:最后的执行元件,接在功率调节器上,用来升/降温度和压力等;简易结构如下图:C.对于无法用模拟量控制的硬件,比如冷却风扇的启停等,只能用开关量控制,可以用PID算法(PWM)控制固态继电器(SSR)的通断,实现对温度的控制(FB41联合FB43,或者FB41联合FB59或者FB58联合FB59使用,FB58,FB59是专用于温度调节的块,但是占用CPU资源过大)。
控制原理:温度传感器检测到传感器的温度信号,经温度变送器将温度值转换成4~20mA的电流信号,送入PLC AI模块。
PLC把这个测量信号经过标度变换与设定值比较得到偏差,经PID运算后,发出PWM控制信号,经PWM来控制固态继电器的通断,来间接调节加热元件等的通断,从而实现温度的连续控制。
需要的元器件:1.固态继电器:与方法B相比,是将B中的功率调节器换成了固态继电器;2.其他与B类似,如果PLC模拟量输入模块带有RTD模块(直接接热电阻信号)的功能,温度变送器可以不用;二.下面主要介绍方法B和C的原理和程序编写:二.1 方法B—用PLC中的FB41块(模拟量输出控制):PLC需要用到的块为:OB35,FB41,FC105(若用RTD模块接收温度可不用),FC106。